kdl16变频器驱动解释
S1-EL-11-E04 KDL16驱动系统新编教材

课程描述目录1.KDL16熟悉部件 ................................................... - 3 -1.1 KDL16驱动简介............................................. - 3 -1.2 KDL16L部件介绍............................................ - 4 -1.3 KDL16R部件介绍............................................ - 6 -2 KDL16称重调试 ................................................... - 8 -2. 1称重概述................................................ - 8 -2. 2调节称重装置LWI ........................................ - 8 -2. 3 调节称重装置(LWD+LCEVTC) ............................... - 9 -3 KDL16Encode.Resolve极性检查 .................................... - 10 -4 KDL16接地.屏蔽线检查 ........................................... - 11 -5 KDL16接线检查完好 .............................................. - 12 -6 KDL16了解各电子版的输入输出信号.指示灯等 ....................... - 17 -1.KDL16熟悉部件1.1 KDL16驱动简介KDL16驱动是目前推出的一种改进型驱动,它可以替换原来的V3F16L驱动,可以用在Monospace,Xminispace,Sminispace等梯型上,该类驱动又分KDL16L及KDL16R 两种,根据不同的电梯参数可以配用不同的KDL16驱动类别,KDL16L与V3F16L外形非常相似.要注意的是该类驱动不能使用原来的Tacho测速发电机而只能使用专用的编码器。
KONE_KDL16参数

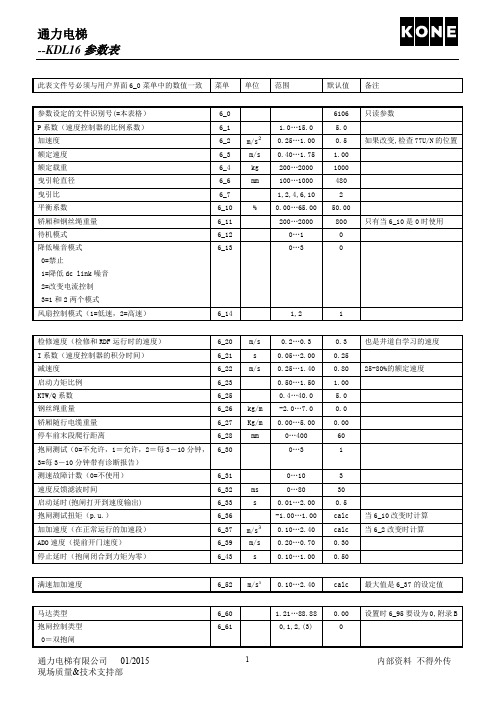
本页文件的编号必须与 UI 菜单 6_0 报告的编号一致。
文件标识 - 文件标识的设置参数(= 本页)
UI 菜单 单位
6_0
范围
备注
6100 只读
电梯参数 - P 系数 (速度控制器比例增益) - 加速度 (在正常模式下,还可以确定跳动) - 额定速度(电梯速度) - 电梯负载 - 曵引轮直径 - 绳比 - 平衡 (0 = 无对重) - 轿厢与轿架质量 -节能模式 (0=禁止,1=启用)
注意! 电梯测试仅对一次性启动有效。
电动机数据 - 电动机电源电压 - 电动机额定电流 - 电动机定子额定频率 - 电动机额定转数 - 电动机额定输出功率 -电动机定子的电阻 - 电动机定子的电抗 - 电动机 id 电流比
永久性存储 - 参数锁 (0=开, 1 =锁) - 软件版本
- 默认参数 1=默认加载参数
只有当电动机 NTC 连接时才有
断电次数
V V m/s
PU 电梯额定力矩 PU 电梯额定力矩
版权©2009 通力公司,版权所有。 第3页,
温度: 40. 散热片 41. DCBM-CPU 板 45. 电动机
监测/次数: 61. 驱动模式 62. 通电计时器 63. 断电计数器 65. LWD 输入值
其它信号 110. 总线直流电压 111. 电动机电压 203. 速度误差 208. 力矩前馈参考 209. 速度控制器力矩参考
单位
m/s m m -
6_68
A
10.0 , …, 100.0 0.0
6_69
A
10.0 , …, 100.0 0.0
6_70
0 , …, 1
默认 0
参数 6_86 和 6_87 在测试后更新。参数 lock (6 95) 须设置为0
KDL16维修培训

KDL16 L KDL16 L维修培训维修培训通力电梯有限公司苏州分公司张亮亮20112011--0909--161KDL16 L KDL16 L介绍介绍培训资料,仅供参考培训资料,仅供参考序号名称描述1DCBL板驱动控制板2MCDK板主回路驱动板培训资料,仅供参考3BCK板抱闸控制板4BCL板抱闸控制板5MC16板滤波板6VRB压敏电阻板7C016板接触器板序号名称描述1DCBL板驱动控制板2MCDK板主回路驱动板培训资料,仅供参考3BCK板抱闸控制板4BCL板抱闸控制板5MC16板滤波板6VRB压敏电阻板7C016板接触器板8DC+ BR外部制动电阻9M马达DCBL (drive control board for low DCBL (drive control board for low--riseelevator)培训资料,仅供参考KDL16 L有一个驱动控制板DCBL既385:A1,它可以处理LCE和即将到来的KCE系统的连接。
MCDK (main circuit and driver board)培训资料,仅供参考MC16 (filter board)培训资料,仅供参考MC16滤波板可以隔离输入电源的EMC噪声,防止不必要的干扰。
MC16也有过电流功能,可以保护直流母线充电电路。
VRB (varistor board)培训资料,仅供参考CO16 (contactor board)培训资料,仅供参考KDL16 LKDL16 L驱动的结构驱动的结构BCK (brake control board)培训资料,仅供参考BCK制动控制电路板可以分别打开两个抱闸制动器,序号注释2MX-Encoder编码器用来替换测速发电机3培训资料,仅供参考BCK制动适配电缆4不适用5LWD接口适配电缆6备用电池电缆7热敏适配器电缆KDL16 L套装可以用来替换V3F16L连接驱动模块培训资料,仅供参考KDL16驱动的接地规范培训资料,仅供参考机械操作简介当更换驱动模块时,同时将测速计更换为编码器。
KDL16_6106参数表
0
参数 6_95 需要设置为 0.
6_99
0,1
0
附件 A
实时显示的信号(6_75 选择) 速度和位置: 1 电梯速度 5 电梯位置 7 到下一层的距离 14 井道中点 15 井道信号 m/s m m m 0:在中点之下,1:在中点之上 每个点表示一个信号从 XL1 界面去到驱动。 1=信号动作,0=信号没有动作 第 1 个点 (61N) 第 2 个点 (61U) 第 3 个点 (77S) 第 4 个点 (77N) 第 5 个点 (77U) 驱动控制 20 参考速度 23 马达力矩 25 马达电流 27 KTW/Q 估值 29 马达编码器的脉冲数 30 马达平均电流 31 马达功率 32 ECB-1 状态 33 驱动输出频率 34 电梯速度来自马达频率 温度 A - PPR A KW Hz m/s 马达转一圈的脉冲数 负值意为马达在发电机状态 负值意为马达在发电机状态 0:没连接,1:已连接,2:正运行,3:故障 负值意为马达在发电机状态 m/s 上行正值,下行负值 在底层时显示 0.00m 单位 备注
6_20 6_21 6_22 6_23 6_25 6_26 6_27 6_28 6_30
m/s s m/s
0.2…0.3 0.05…2.00 0.25…1.40 0.50…1.50 0.4…40.0
0.3 0.25 0.80 1.00 5.0 0.0 0.00 60 1
也是井道自学习的速度
25-80%的额定速度
通力电梯有限公司 01/2015 现场质量&技术支持部
3
内部资料 不得外传
通力电梯 --KDL16 参数表
40 变频器温度 41 DCBL 板温度 45 马达温度 监控/计时 61 驱动模式 62 上电时间 63 关电计次 65 LWD 输入值 附加信号监控 110 DC 侧电压 111 马达电压 203 速度误差 208 力矩前馈参考值 209 速度控制器力矩参考值 V V m/s - h - mA 关电的次数 0=待梯,1=正常,2=检修,3=校正,4=再平层,5=减速度 ºC ºC ºC NTC 时适用
2016 SEB技术能力评估笔试 (S2)-3(2)

A.
BCX07
C.
BCB25
B.
BCX08
D.
BCM25
55
下列描述KDM驱动正确的是:
()
A.
KDM不需要制动电阻放电
C.
KR模块不包括抱闸控制模块
B.
KDM可以把回馈制动的电能返到电网中去
D.
电源模块内的IGBT等,我们现场可以更换
56
目前我们使用的KDM中,DCBG的24供电电源来源于
()
13
通力标准钢丝绳防跳杆,防夹手与钢丝绳的间隙为。
()
A.
2~3mm
C.
3~6mm
B.
2~4mm
D.
3~5mm
14
在测量电梯补偿钢丝绳张力时轿厢应停靠在什么位置进行测量
()
A.
井道顶端进行测量
C.
井道1/3高度进行测量
B.
井道2/3高度进行测量
D.
井道底端进行测量
15
MX14马达只具有编码器时适用于通力的哪种驱动
80mm / 110mm
10
客梯的垂直方向振动应不大于;水平方向振动应不大于。
()
A.
20cm/s2/ 10cm/s2
C.
25cm/s2 / 10cm/s2
B.
25cm/s2/ 15cm/s2
D.
30cm/s2 / 15cm/s2
11
防护栏横档间距的跨度应不大于。
()
A.
450mm
C.
550mm
B.
B.KM921317G02DKM921317G04
53KDM驱动系统由以下组成:()
A.KDA和LCEC.KDA和驱动电源模块
电控柜调试参数KDL16
亮 在加速时,速度>0.1 m/s 在减 速时,速度>0.3 m/s 两个主接触器中任一闭合 (201:1, 202:2) 从 LCECPU 来的主接触器闭 合命令有效 所有厅门关闭 轿门关闭 关门命令有效 需要驱动 DRV 板无故障 安全回路正常
2.7.2 检查编码器极性
在 RDF 模式下驱动电梯上行,若主机不是逆时针转动,则需更改驱动参数 6-65(例如将 1 改成-1), 然后进行重复测试。
13
KDL16 电控柜调试参数表
G8000006/A 共 74 页 第 74 页
3.快车调试
3.1 井道自学习(5-2-1)
步骤 1 2
3 4 5
2.3 检查轿顶板拨码开关位置是否正确
1 FORCE LIM. A
2 OPEN END A
3 CLOSE END A
4
5 FORCE LIM. B
6 OPEN END B
7 CLOSE END B
8
2.4 修改 CPU 参数
参数号
初始值
1-2
3
1-12
1
1-13
1
1-18
3
1-24
0
1-42
0
1-43
G8000006/A 共 74 页 第 74 页
2. 慢车调试 2.1 控制柜接线说明 使用测试台时接线: 1.主电力线 1:L1,L2,L3,PE 接控制柜 L1,L2,L3,PE, L 接 501,N 接 502。 2.主电力线 2:U,V,W,PE 一端接控制柜 U,V,W,PE,另一端接曳引机 U,V,W,PE 3.抱闸线:XBR4。 4.热敏电阻:XT1。 5.编码器线:XMEN5 6.测试台的各个接插件接到控制柜和轿顶检修盒的相应位置。 7.随行电缆的接插件按标识接在 LCECPU、LCEDRV 盒 LCECCB 的相应位置。 8.将轿顶接线盒内的电池连线 XB32 接到 CCBS 的 XB32,在测试结束后应拔下。 2.2 SASS 设备使用说明 1. XB26 为下强迫信号(77:N),XB25 为上强迫信号(77:U)。 2. XB21(30)/XB23(61:U)/XB24(61:N):
通力称重及舒适感调试步骤(使用于KDL16,32,KDM驱动)

一,电梯置RDF,清空轿厢:1)绳头称重步骤1,将LWD setup (6_74) 参数设定为-2。
2 ,将Save (6_99) 参数设定为1。
选 5 _1 _,L _ _ (xx, 表示负荷百分比)3,转动LOP- CB板或LCEVTC上的OFFSET电位计,直至屏幕上显示数字0。
L _ _ 02),轿底称重步骤1 ,选择LWD setup(6_74)参数设定为-1 ,2,设(6_75)参数为65(LWD输入值)。
检查值是否在6-8之间。
如果值为0 => 传感器未连接或间隙太宽,如果值太高=> 检查LWD 传感器。
3,按6_74_0,确认二,电梯加入50 %载荷:1),绳头称重步骤1,用LOP-CB板或LCEVTC上转动GAIN电位计。
2, 5 _1 _显示L _ _ 502),轿底称重步骤1,6_74输入50确认,检查值是否在10-15间。
2,将Save(6_99)参数设定为1三,设(6_75)参数为14(井道中间点,之上1,之下0),电梯置正常,井道中间楼层,上下运行,钳形电流表测变频器前端一相电流,增减对重数,确保轿厢上行电流比下行大一点(尽量不超1.A),以保证45—50%平衡系数的要求,记下上下中间电流值。
四,电梯拿出10 %载荷,做40%载荷上下运行,记下上下中间电流值,确保轿厢上行电流比下行尽量小。
五,电梯置RDF加到100 %载荷:两种称重,6_74输入103确认,将Save(6_99)参数设定为1保存,以保证满载再加入75kg超载。
(灯闪,声响)六,设(6_75)参数为27,( KTW/Q 估算,影响平层精度和停梯舒适感),电梯顶底楼快车各运行一次,读数记平均值到6-25中。
(6_25 0.4 , …,11.0﹛100%负荷(顶+底)/2﹜默认 4.0),记下满载上下中间电流值。
七,改- P 值 (速度控制器比例增益)6_1 默认5.0=>1.5;- 启动延时(制动打开命令 -> 速度参考值)6_33 s 默认0.35=>…,2.00,1)电梯拿出50 %载荷,留50 %载荷,准备做舒适感。
KDL16调试培训课程

6
2020/5/4
KDL16驱动结构
KDL16驱动端口接线
XMEN5:编码器端口 XW1:称量装置端口 XBAT1:备用电池端口
XL1:通讯端口 XT1:热敏电阻端口
XS3:安全回路板信号端口 T1 T2 T3:输入电源端口 U V W:输出电源端口 XBRE2:制动电阻端口
KDL16小机房控制柜
1 m/s(电梯额定速度) kg(电梯额定载重) mm(曳引轮直径) 0.25(提前开门速度)
88.88 1(抱闸类型)
8192 120(电机极限工作温度) V(电机反电动势) A (电机额定电流) Hz (电机额定频率) r/min(电机额定转速) Kw(电机额定输出功率) Ω(电机定下方。
77N
18 2020/5/4
KDL16—井道信号
77U/77N 注意:上下强迫减速磁开关 被安装时需保证磁开关与 塑胶磁条正垂直,并且磁 开关与塑胶磁条的垂直间 距在5-10mm
19 2020/5/4
KDL16—机房
1=编码器线 2=抱闸控制电缆 3=主机电源线 4=热敏电阻电缆
1 2
16 2020/5/4
KDL16—井道信号
30/B30/61U/61N • 安装后必须保证挡板支架牢固地固 定在导轨上,竖直方向上不松动。 隔磁板与U型磁开关之间的相对位置
必须严格按照右参照图所示。 然后按此方法装好每一楼层的挡板
17 2020/5/4
KDL16—井道信号
77U/77N
1
22 2020/5/4
KDL16-调试
1. 编码器方向确认
RealTimeDisplay monitor
1
selection (6_75)选择1(实
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
V3F16L驱动介绍1/3
驱动原理图
培训资料,仅供参考
V3F16L驱动介绍2/3
制动电阻
KONE 3000 MonoSpace® 与KONE 3000 TranSys™ 控制柜 分为两个部分
V3F16L驱动
SEP井道控制 柜
一部分放到井道中,称为 SEP-井道控制柜,
另外一部分在顶层层门旁, 称为MAP-维修操作盘
培训资料,仅供参考
V3F18/25驱动介绍1/3
原理图:
培训资料,仅供参考
V3F18/25驱动介绍2/3
V3F18驱动组成:
1. 制动控制模块385:A5 2. PCB模块385: A1, A2 3. 电流测量板385:A3 4. 主接触器201:1,2 & 辅助继电器 & 保险298 5. 直流电路电容器385:C1,C2,(C3,C4) 6. EMC模块389 7. 变压器T1 8. 风扇303 9. 动态制动接触器204 10. 大功率晶体管385:V1...V3 11. 三相整流桥385:V5料,仅供参考
V3F16L驱动介绍3/3
V3F16L驱动模块组成:
1. 制动器, XBR3 2. LCE电缆,XS3 3. 马达电缆,U-V-W 4. 供电电缆,T1-T2-T3 5. LWD及马达电流,XW1 6. MAP测速计,XLG1 7. 测速计,XG1 8. LCECPU电缆,XL1 9. 马达热敏,XT1 10. 制动电阻,XBRE2 11. 盖板 12. 盖板连线 13. 电缆套管孔
培训资料,仅供参考
V3F18/25驱动介绍5/3
HCB板 385:A1
培训资料,仅供参考
V3F18/25驱动介绍6/3
高压危 险指示
线电压选择 Line Voltage
逆变板 385A:2
培训资料,仅供参考
X6 到385:V4 XD5 到HCB板
KDL16驱动 -打开外盖
培训资料,仅供参考
KDL16驱动接线位置
制板
• 385:A4 Intermediate Circuit Board (IMC) 中间电路板
• 主接触器201:1,201:2,204(动态制动) • 过滤器 • 充电电容385:C1培,训C资2料,仅供参考 • 充电电阻385:R1,R2(1k, 50w)
V3F16es驱动介绍2/2
内部结构
培训资料,仅供参考
V3F18/25驱动介绍3/3
制动电阻306
40A驱动模块
V3F25驱动结构图: 385:
A3
385: A2
385: A1
制动三极管
IGBT 晶体管
385: V4 385: V3 385: V2 385: V1
二极管 整流桥
385: V5
385: C4
385: C2
电容器
385: C1 385: C3
89 变压器
303 风扇
V3F18/25驱动介绍4/3
V3F25驱动组成:
1. HCB:运动控制板385:A1 2. 逆变器板385:A2 3. 电流测量板385:A3 4. 风扇303 5. 变压器89 6. 中间直流电路电容器385:C1,C2,(C3,C4) 7. 大功率晶体管385:V1...V3 8. 制动三极管385:V4 9. 二极管整流桥385:V5 10.(内部)制动电阻306。只用于40A的V3F25中
培训资料,仅供参考
连KD接L16驱动
培训资料,仅供参考
内KD部L可16更L换驱部动件
培训资料,仅供参考
KDL16L 驱动模块的接地
培训资料,仅供参考
KDL16 马达主要参数
Motor type (6_60)参数
培训资料,仅供参考
KDL32驱动
培训资料,仅供参考
KDL32 马达主要参数
培训资料,仅供参考
Dynamic braking
培训资料,仅供参考
M T
acdc.wmf
V3F驱动系统
V3F16es驱动介绍1/2
组成:
• 385:A1 Drive Control Board (DCB) 驱动控制 板
• 385:A2 Main Circuit Board (MCB) 主回路板 • 385:A3 Brake Control Board (BRK) 抱闸控
驱动介绍
V3F16ES驱动原理:
Mains supply 380...415 VAC
Intermediate circuit 530...700 VDC
Motor supply 0...300VAC 0...20 Hz
L1
r
L2
s
L3
t
Filter
AC DC
DC AC
V3F16es module
Electronics