轮机自动化基础(ppt 159页)_11215
合集下载
轮机自动化基础课件--自动控制系统的数学模型
微分方程是描述系统动态过程数学模型 最基本的方式 建模方法:解析法;实验法。任何一个物理 系统都可以用一个微分方程进行描述,控制 系统也不例外。
ST
§2-1 物理系统的运动方程式
SISO线性定常系统的微分方程一般形式为:
an
d ny(t) dtn
+
a
n-1
d n-1y ( t )+ d tn -1
L f (t) s2F(s) sf (0) f (0)
L f n(t) snF(s) sn 1 f (0) sn 2 f (0)... sf n 2(0) f n 1(0)
§2-2 传递函数
3、积分定理
F(s) f 1(0)
L f (t )dt
s
s
其中:f 1(0) f (t)dt t0
且00-+δ(t)=1
§2-2 传递函数
L[(t)] 0(t)estdt 00 (t)dt 1
三、拉氏变换定理
1、线性迭加 若L[ f1(t)] F1(s), L[ f2(t)] F2(s)
则Laf1(t) bf2(t) aF1(s) bF2(s) a、b为常数
2、微分定理
L f (t) sF(s) f (0) 其中F(s) L[ f (t)], f (0) f (t) t0
1)
3
s 1
2
a2
d ds
s
2 2s (s 1)3
3
•
(s
1) 3
2s
s1
2 s1
0
a1
1 d2
2!
ds
2
s
2 2s (s 1)3
3
•
(s
1)
3
s1
ST
§2-1 物理系统的运动方程式
SISO线性定常系统的微分方程一般形式为:
an
d ny(t) dtn
+
a
n-1
d n-1y ( t )+ d tn -1
L f (t) s2F(s) sf (0) f (0)
L f n(t) snF(s) sn 1 f (0) sn 2 f (0)... sf n 2(0) f n 1(0)
§2-2 传递函数
3、积分定理
F(s) f 1(0)
L f (t )dt
s
s
其中:f 1(0) f (t)dt t0
且00-+δ(t)=1
§2-2 传递函数
L[(t)] 0(t)estdt 00 (t)dt 1
三、拉氏变换定理
1、线性迭加 若L[ f1(t)] F1(s), L[ f2(t)] F2(s)
则Laf1(t) bf2(t) aF1(s) bF2(s) a、b为常数
2、微分定理
L f (t) sF(s) f (0) 其中F(s) L[ f (t)], f (0) f (t) t0
1)
3
s 1
2
a2
d ds
s
2 2s (s 1)3
3
•
(s
1) 3
2s
s1
2 s1
0
a1
1 d2
2!
ds
2
s
2 2s (s 1)3
3
•
(s
1)
3
s1
轮机自动化复习资料.ppt
Pmax-Pmin—调节器输出最大变化范围,即仪表的工作范围。
比例带PB
被控量相对其满量程的变化量 调节器输出量相对其满量程的变化量
例如PB=100%,说明被控量变化全量程的100%,即变化全量程, 调节器使调节阀开度变化全行程。
若PB=50%,说明பைடு நூலகம்控量变化全量程的一半,调节器就使调节阀开度 变化全行程。
A、0.55MPa C、0.65MPa
B、0.60MPa D、0.74MPa
调节器基本作用规律
比例 PB
PB e /( X max X min ) 100% P /( Pmax Pmin )
2024/10/10
例:一比例电动温度调节器,其量程是100-2000C,调 节器输出电流为0-10mA,当指示值从1400C变化到 1600C时,相应调节器输出电流从3 mA变化到8 mA, 则:
dh dt
|t 0
K
T
单容控制对象受到相同的阶跃扰动之后,知其飞升曲
线,通过比较可得其参数
h
K、F、T、R关系
例题
1 2
t
3.双位控制系统中,用YT-1226压力调节器
2024/10/10
P
PZ
PX
0.07 (0.25 0.07) x 10
例:在双位控制系统中,用YT-1226压力调节器检测压力 信号,若压力下限调在0.45MPa,幅差旋钮调在7格上, 则压力上限值是( ),其中幅差范围0.07~0.25MPa。
3%时,调节器输出立即从0.08MPa减小到0.068MPa,
8min后调节器输出降至0.044MPa,则该调节器的PB和
Ti分别是
A、PB=500%,Ti=8min
轮机自动化基础讲义
开环控制系统精度不高和适应性不强的主要原因是缺少从系统输出到输入的 反馈回路。若要提高控制精度,必须把输出量的信息反馈到输入端,通过比较输入 值与输出值,产生偏差信号,该偏差信号以一定的控制规律产生控制作用,逐步减 小以至消除这一偏差,从而实现所要求的控制性能。 控制器与控制对象之间既有顺向作用又有反向联系的控制过程,既控制系统的 输出量对系统的控制作用有影响,即反馈(feedback)。因此,又称为反馈控制。 以液箱水位控制系统为例:
(4)脉冲输入:
1 r (t ) h 0
(0 t h ) (t 0, t h)
r (t ) A sin t (5)正弦输入: 其中,阶跃输入对系统的工作最为不利。 4.自动控制系统过渡过程的性能要求
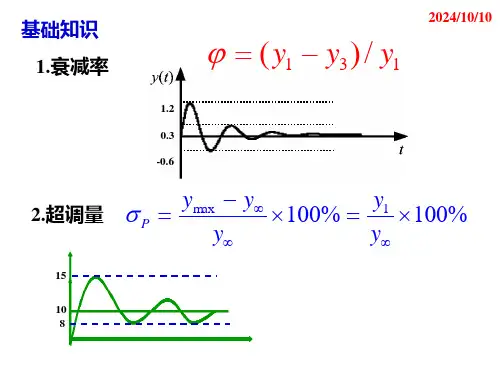
方法:给系统施加阶跃输入,得到系统过渡过程曲线,分析系统过渡过程的各 项性能指标。 采用阶跃输入的原因: (1)信号的阶跃变化在实际中比较常见(近似的阶跃变化) ; (2)阶跃信号的数学处理比较简单; (3)阶跃输入对系统的工作最为不利。 一般说来,对系统品质指标的基本要求可以归纳为三个字:稳、准、快。评定 系统过渡过程性能指标的三个方面: (1)稳定性; (2)准确性; (3)快速性。 (1)稳定性:系统受到扰动之后能够恢复到稳定状态的能力。实际控制系统,至少 要求是率减过程或非周期过程,以率减为佳。 评定指标:衰减率 φ,衰减比N (a)定值控制系统:给定值不变,外部扰动发生阶跃变化; (b)随动控制系统:假定外部扰动不变,给定值阶跃变化。 (2)准确性:被控量偏离给定值的程度 评定指标: (a)定值控制系统:最大动态偏差emax;静态偏差Δys (b)随动控制系统:最大动态偏差emax;超调量δ;静态偏差Δys 。 (3)快速性: 评定指标:过渡过程时间 ts——从扰动发生到被控量又重新趋于稳定达到新的 平衡态所需的时间。
轮机自动化课件..
1.慢转起动的逻辑条件
1)起动前主机停车时间超过规定的时间; 2)没有应急取消慢转指令; 3)没有达到规定的转数或规定的慢转时间; 4)没有重起动信号; 5)满足起动的逻辑条件
YSLD STD I SC R1 YSH YSO
返回本节
2、慢转起动逻辑回路的功能
慢转起动逻辑回路应该能够检测慢转逻辑条件,
3)转速条件 转速低于换向转速nR或应急换向转速nER
4)顶升机构抬起
Dup=1
返回本节
换向的逻辑条件表达式
YR YRL YRT (n R n ER ) Dup ( I H C H I S C S )YRT (n R n ER ) Dup
2、双凸轮换向的逻辑图
返回本节
1、能耗制动
能耗制动是指,主机在运行中完成应急换向后,在 主机高于发火转速情况下所进行的一种制动。常常 是在应急操纵的情况下进行。其原理是保持主起动 阀处于关闭状态,让空气分配器投入工作,此时由 于换向已经完成,空气分配器是按与主机运转方向 相反的顺序打开个气缸起动阀,当某个气缸的气缸 起动阀打开时正好处在压缩冲程。柴油机相当于一 台压气机,快速消耗柴油机运动部件的惯性能,使 主机转速能以较快的速度下降。
第三节
换向与制动逻辑回路
一、换向逻辑回路 1、换向的逻辑条件 1)换向的鉴别逻辑
YRL I H CS I S CH IH C H IS C S
返回本章
2)停油条件
YRT ( I H C H I S C S ) ( I H RH I S RS ) I H (C H RH ) I S (C S RS )
二、重复起动逻辑回路
1、时序逻辑控制方式 2、时序—转速逻辑控制方式 三、重起动逻辑回路
第一章(新) 轮机自动化基础 课件(武汉理工大学轮机工程)
ST
§1-2
1. 开环控制系统
自动控制的基本方式
Fig.1-1◎
控制系统的输出对系统的控制作用没有影响。 (1)按给定值进行控制 (2)按扰动补偿进行控制 2.闭环控制系统 Fig.1-2◎
控制系统的输出对系统的控制作用有影响,即控制器的输 出作用于控制对象,控制对象的输出(系统的输出)将送 回到控制器,控制器根据偏差进行控制。因此,又称为反 反 馈控制。 馈控制
ST
y
t 平衡状态 平衡 状态 过渡过程
fig.1-8 自动控制系统过渡过程曲线
ST
(a)
(b)
(c)
fig.1-14 过程曲线基本类型
(d)
ST
§1-4
自动控制的性能指标
3.自动控制系统的典型输入信号 为便于系统分析,定义几种常见的系统输入信号: (1)阶跃输入: (2)速度输入 : Fig.1-9◎ Fig.1-10◎
机舱控 制室
主机组全气 遥控系统
§1-1
引言
所谓自动控制,是指在没有人参与的情况下利用控制器 使被控对象(即生产设备或生产过程)自动地按预定的规 律运行。包括参数控制和程序控制 例如: (1)锅炉水位和压力保持在规定的范围或设定值上; (2)船舶的舵角按发出的舵令变化; (3)柴油主机的起动按规定的操作规程进行; (4)分油机的排渣过程按预定的程序进行。
ST
V2
Q2
H F
V1 Q1
图1-1 液位控制系统示意图
ST
V2
+E
Q2
浮子
H 电动机 控制器 +E F
V1 Q1
图1-2 液位控制闭环系统示意图
ST
§1-2
3.复合控制
第一章 轮机自动化基础知识完整PPT
第二十二页
(1)积分时间的物理意义
输入一个阶跃偏差后积分输出等于比例输出所需的时间就是 积分时间
(2)Ti越小,积分输出达到比例输出的时间越短,积分作用越 强
(3) Ti值不能准确地整定,宁大勿小
(4)范围在3s到20min之间
第二十三页
四.比例微分作用规律 1.微分作用--能预示控制对象受扰动的猛烈程度,能在
偏差出现之前,提前改变调节阀的开度。 2.实际微分作用:
第二十四页
3.比例微分作用--在比例作用的基础上,加微分作用用; 比例作用主要,决定调节阀的开度的变化量;微分作用辅 助,起超前控制作用。
4.微分作用时间的大小是衡量微分作用强弱的参数。 5.比例微分调节器与比例调节器一样,不能消除静态偏差。 6.比例微分输出特性
2)程序控制系统
3)随动控制系统
第六页
四.反馈控制系统的动态过程 1.动态过程特点 1)稳态
2)动态过程
3)特点:是一个衰减振荡过程
2.评定控制系统动态过程品质的指标
1)四种扰动形式:阶跃形式、线性形式、脉冲形式、正
弦形式 2)定值控制系统品质指标
(1)最大动态偏差 (2)衰减率(0.75-0.90)
4)迟延是不可能消除的,只能在控制系统的布置上尽量减少迟延。
开环系统:逻辑控制系统 2%,所需要的时间
5.放大系数:控制对象受到阶跃扰动后,被控量从初始平衡状态达到新稳态值的变化量,把扰动量所放大的倍数。
闭环系统:反馈控制系统 三.反馈控制系统的分类
一.单容控制对象的动态特性 5.放大系数:控制对象受到阶跃扰动后,被控量从初始平衡状态达到新稳态值的变化量,把扰动量所放大的倍数。 3)比例带的物理意义: 1)优点:积分作用规律使被控量能稳定在给定值上,消除静态偏差。
(1)积分时间的物理意义
输入一个阶跃偏差后积分输出等于比例输出所需的时间就是 积分时间
(2)Ti越小,积分输出达到比例输出的时间越短,积分作用越 强
(3) Ti值不能准确地整定,宁大勿小
(4)范围在3s到20min之间
第二十三页
四.比例微分作用规律 1.微分作用--能预示控制对象受扰动的猛烈程度,能在
偏差出现之前,提前改变调节阀的开度。 2.实际微分作用:
第二十四页
3.比例微分作用--在比例作用的基础上,加微分作用用; 比例作用主要,决定调节阀的开度的变化量;微分作用辅 助,起超前控制作用。
4.微分作用时间的大小是衡量微分作用强弱的参数。 5.比例微分调节器与比例调节器一样,不能消除静态偏差。 6.比例微分输出特性
2)程序控制系统
3)随动控制系统
第六页
四.反馈控制系统的动态过程 1.动态过程特点 1)稳态
2)动态过程
3)特点:是一个衰减振荡过程
2.评定控制系统动态过程品质的指标
1)四种扰动形式:阶跃形式、线性形式、脉冲形式、正
弦形式 2)定值控制系统品质指标
(1)最大动态偏差 (2)衰减率(0.75-0.90)
4)迟延是不可能消除的,只能在控制系统的布置上尽量减少迟延。
开环系统:逻辑控制系统 2%,所需要的时间
5.放大系数:控制对象受到阶跃扰动后,被控量从初始平衡状态达到新稳态值的变化量,把扰动量所放大的倍数。
闭环系统:反馈控制系统 三.反馈控制系统的分类
一.单容控制对象的动态特性 5.放大系数:控制对象受到阶跃扰动后,被控量从初始平衡状态达到新稳态值的变化量,把扰动量所放大的倍数。 3)比例带的物理意义: 1)优点:积分作用规律使被控量能稳定在给定值上,消除静态偏差。
轮机自动化课件 第一章
(4)比例带对系统过渡过程的影响
3、特点
(1)调节及时,且调节器的调节量随偏 差增大以及比例系数增大而增大。 (2)一般调节完毕,会有静差出现。
4、适用范围
适用于干扰较小,对象滞后较小, 时间常数较大的调节对象,此时选PB小 些,使静态偏差不致太大,同时又能保 证控制过程有足够的稳定性。
眼
锅炉
1
脑 2
3
5
4
手
锅炉水位的自动控制
1—水位发讯器;2—变送器;3—调节器;4—执行机构;5—给水阀眼源自脑主 机淡水泵 三通阀
手
海水入口
冷却器
海水出口
柴油机气缸冷却水温度手动控制过程
温度变送器
主 机
调节器
淡水泵 三通阀
执行机构
手
冷却器
海水出口 海水入口
柴油机气缸冷却水温度自动控制过程
二、自动控制系统的基本组成
三、比例积分调节规律PI
1、积分调节规律I
(1)概念:调节器的输出与偏差输入对时间的积分成
正比。
p(t ) K I e(t ) dt
式中,KI为积分速度。
从上式可看出:调节器输出信号的大小不仅取决于偏差输入信 号的大小,而主要取决于偏差存在的时间长短。只要有偏差, 尽管偏差可能很小,但它存在的时间越长,输出信号就越大。
第二节 调节器的调节规律
e>0,P>0,正作用调节器;e>0,P<0,反作用调器。
比例P 三种基本调节规律 积分I 组成5种实用调节规律: 微分D
双位调节规律、比例调节规律P、比例积分调节 规律PI、比例微分调节规律PD、比例积分微分调 节规律PID。
轮机自动化
第十一章 主机遥控系统基础知识
《轮机自动化》
二、主机自动遥控系统的主要功能
3、主机的转速与负荷控制功能 (4)负荷限制 起动供油量的设置 转矩的限制 增压空气压力限制 螺旋桨特性限制 (转矩与转速成平方关系) 最大油量限制
第十一章 主机遥控系统基础知识
《轮机自动化》
第一节 主机遥控系统基本概念
二、主机自动遥控系统的主要功能
4、安全保护及应急操纵功能 (1)安全保护 slowdown shutdown (2)应急操纵 机旁应急运行 应急运行(越控) 手动应急停车 5、模拟试验功能 显示遥控系统工况、电磁阀状态、起动过程、凸轮轴 位置、调试遥控系统参数、判断故障点
第十一章 主机遥控系统基础知识
《轮机自动化》
第一节 主机遥控系统基本概念
二、主机自动遥控系统的主要功能
1、操作部位切换 2、逻辑程序控制功能 3、主机的转速与负荷控制功能 4、安全保护及应急操纵功能 5、模拟试验功能
第十一章 主机遥控系统基础知识
《轮机自动化》
第一节 主机遥控系统基本概念
二、主机自动遥控系统的主要功能
三、气动比例元件
1、减压阀 2、转速设定精密调
第十一章 主机遥控系统基础知识
《轮机自动化》
第二节 主机遥控系统主要元部件
三、气动比例元件
2、转速设定精密调压阀
第十一章 主机遥控系统基础知识
《轮机自动化》
第二节 主机遥控系统主要元部件
四、主机遥控系统气源的标准及其要求
1、气源的形式 2、气源净化装置 3、气源的切换
《轮机自动化》
第二节 主机遥控系统主要元部件
一、逻辑元件
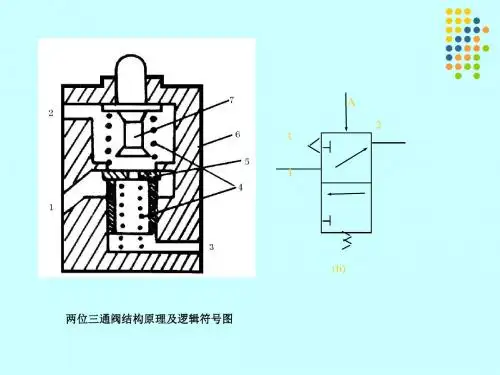
1、二位三通阀 机械动作的两位三通阀 气动两位三通阀
第1章 轮机自动化基础PPT课件
1)过渡过程评定指标
(1)稳定性:系统受到扰动之后能够恢复到稳定状态的能力。实 际控制系统,至少要求是率减过程或非周期过程,以率减为佳。
评定指标:衰减率 φ,衰减比N
(a)定值控制系统:给定值不变,外部扰动发生阶跃变化; fig.1-15◎
(b)随动控制系统:假定外部扰动不变,给定值阶跃变化。 fig.1-16 ◎
R
(1)阶跃输入: r(t)0 (2)速度输入 :r(t)0Rt
(t 0) (t 0) (t 0) (t 0)
Fig.1-9◎ Fig.1-10◎
(3)加速度输入:r(t)
1 2 0
Rt2
(t 0) (t 0)
(4)脉冲输入:
1
r(t)
h
0
(0t h) (t 0,t h)
Fig.1-11◎ Fig.1-12◎
轮机自动化基础
•自动控制发展概况
• 公元前1400-1100 年,中国、埃及和 巴比伦相继出现自 动计时漏壶,人类 产生了最早期的控 制思想。
• 公元前300年秦昭王时,由李冰父子主持设计修 筑的著名水利工程都江堰,是一种液面控制, 是“系统”观念的杰出体现。
• 公元100年,亚历山大的希罗发明开闭庙 门和分发圣水的自动计时装置。
• 公元132年,中国科学家张衡(公元78~139)发 明水运浑象,研制出自动测量地震的候风地动 仪。
• 公元235年, 中国马钧研 制出用齿轮 传动的自动 指示方向的 指南车(司南 车)
另有发明 击鼓记里
• 公元1637年, 中国明代宋 应星所著 《天工开物》 记载有程序 控制思想的 提花织机结 构图。
若控制单元、测量单元和执行单元合为一体,则称为 基地式控制仪表;若三者分开,则称为组合式控制仪表。
(1)稳定性:系统受到扰动之后能够恢复到稳定状态的能力。实 际控制系统,至少要求是率减过程或非周期过程,以率减为佳。
评定指标:衰减率 φ,衰减比N
(a)定值控制系统:给定值不变,外部扰动发生阶跃变化; fig.1-15◎
(b)随动控制系统:假定外部扰动不变,给定值阶跃变化。 fig.1-16 ◎
R
(1)阶跃输入: r(t)0 (2)速度输入 :r(t)0Rt
(t 0) (t 0) (t 0) (t 0)
Fig.1-9◎ Fig.1-10◎
(3)加速度输入:r(t)
1 2 0
Rt2
(t 0) (t 0)
(4)脉冲输入:
1
r(t)
h
0
(0t h) (t 0,t h)
Fig.1-11◎ Fig.1-12◎
轮机自动化基础
•自动控制发展概况
• 公元前1400-1100 年,中国、埃及和 巴比伦相继出现自 动计时漏壶,人类 产生了最早期的控 制思想。
• 公元前300年秦昭王时,由李冰父子主持设计修 筑的著名水利工程都江堰,是一种液面控制, 是“系统”观念的杰出体现。
• 公元100年,亚历山大的希罗发明开闭庙 门和分发圣水的自动计时装置。
• 公元132年,中国科学家张衡(公元78~139)发 明水运浑象,研制出自动测量地震的候风地动 仪。
• 公元235年, 中国马钧研 制出用齿轮 传动的自动 指示方向的 指南车(司南 车)
另有发明 击鼓记里
• 公元1637年, 中国明代宋 应星所著 《天工开物》 记载有程序 控制思想的 提花织机结 构图。
若控制单元、测量单元和执行单元合为一体,则称为 基地式控制仪表;若三者分开,则称为组合式控制仪表。
轮机自动化幻灯
《轮机自动化》
第七节 转速与负荷的控制及限制
4)起动逻辑回路的附加功能 (1)重复起动逻辑 (2)重起动逻辑 (3)慢转起动逻辑
3 .换向逻辑回路
1)柴油机换向原理 YRL I H C S I S C H I H C H I S C S 改变凸轮轴位置,继而改变空气分配器、喷油泵和进排气定 时 2)换向的逻辑条件 (1)换向的鉴别逻辑
RR
-
Re
主 机
最小给油量限制 最大给油量限制
转速检测
船舶柴油主机转速调节系统方块图
1、加速速率限制 2、程序负荷
四、转速限制
1、最大转速和最低稳定转速限制 2、临界转速回避
第十一章 主机遥控系统基础知识
《轮机自动化》
第七节 转速与负荷的控制及限制
主机遥控系统基本控制逻辑
1 .大型柴油机起动原理 打开主起动阀并按主机发火顺序控制气缸起动阀开启, 使高压空气进入气缸,推动主机按正车或倒车方向转动,达 到发火转速之后切断起动空气,在燃油的燃烧作用下继续维 持运转。 2.起动逻辑回路 1)起动准备逻辑条件
第十一章 主机遥控系统基础知识
《轮机自动化》
第七节 转速与负荷的控制及限制
五、负荷限制
1、转矩限制 2、增压空气压力限制 3、最大油量限制
第十一章 主机遥控系统基础知识
《轮机自动化》
偏差形成环节
转速设定环节
RI- RR= Re
变给定值 变负荷 测量噪声
转速调节环节
给油执行机构
线性/非线性
负荷/扰动 吃水、风浪 水流、阻力
第十一章 主机遥控系统基础知识
《轮机自动化》
第七节 转速与负荷的控制及限制
(2)停油条件 换向之前必须保证已经停油 (3)转速条件 转速低于换向转速nR或应急换向转速nER (4)顶升机构抬起(四冲程柴油机)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
精度等级数值越小,就表征该仪表的精确度 等级越高,也说明该仪表的精确度越高。
0.05级以上的仪表,常用来作为标准表;工 业现场用的测量仪表,其精度大多为0.5级以下。
仪表的精度等级一般用符号标志在仪表面板 上。如
1.5 回差
y
在外界条件不变的情况下,同
一仪表对被测量进行往返测量时
∆ymax
(正行程和反行程),产生的最大
一、自动化仪表的分类
• 按能源分: — 电动、气动、液动 • 按功能分: — 检测、显示、调节、执行 • 按结构形式分: — 基地式 — 单元组合式:标准信号
气动:0.02MPa~0.1MPa 电动:4mA~20mA DC
二、自动化仪表的主要品质指标
1、仪表的误差 2、仪表的灵敏度 3、仪表的稳定性
主要的参考文献
• 徐善林、崔庆渝编,《轮机自动化》,人民交通出版社 • 郑凤阁编,《轮机自动化》,大连海事大学出版社 • 上海交通大学,《》
第二章 自动化仪表
• 第一节 基础知识 • 第二节 气动变送器 • 第三节 气动显示仪表 • 第四节 气动调节器 • 第五节 气动执行器
第一节 基础知识
一、自动化仪表的分类 二、自动化仪表的主要品质指标 三、气动仪表的基本元部件 四、气动仪表的组成原理
差值与测量范围之比称为变差。
正反行程最大差值
变差 =
×100%
量程
O xmin
xmax
x
造成变差的原因: 传动机构间存在的间隙和摩
擦ห้องสมุดไป่ตู้; 弹性元件的弹性滞后等。
2、灵敏度和分辨率 灵敏度表示指针式测量仪表对被测参数变化的敏 感程度,常以仪表输出(如指示装置的直线位移或角 位移)与引起此位移的被测参数变化量之比表示:
1.2 相对误差 相对误差是指仪表的绝对误差和检测仪表的指
示值之比的百分数。表示为:
相对误差= (Δ / 指示值)*100%
相对误差的大小可以反映仪表的测量准确度
1.3 基本误差和附加误差 基本误差是一种简化的相对误差,又称引用
误差或相对百分误差。定义为:
基 本 误 差 最 大 仪 绝 表 对 量 误 程 差 m ax 100%
轮机自动化基础(ppt 159页)
轮机自动化基础
y
r
y1
y3
Tp
T
TS
• 自动化控制系统的性能要求
C
y(∞) t
轮机自动化基础
y
e
t
t
T
y
T0
t t
• 控制对象的特性 • 调节器的控制规律
本课程的主要内容
• 自动化仪表(14学时) • 自动控制系统(16学时) • 集中监视与报警系统(12学时) • 主机遥控(20学时) • 实验(10学时)
1.1 绝对误差
检测仪表的指示值X与被测量真值X t之间存在 的差值称为绝对误差Δ。表示为:
Δ= |X-X t | 由于真值是无法得到的理论值。实际计算时, 可用精确度较高的标准表所测得的标准值X0代替真 值X t,表示为:
Δ= |X-X 0 | 仪表在其标尺范围内各点读数的绝对误差中最 大的绝对误差称为最大绝对误差Δmax。
从输入一个阶跃信号 x
开始,到仪表的输出信号
y
(即指示值)变化到新稳
态值的95%所用的时间。
tp
t
以上是检测仪表常用的性能指标。
三、气动仪表的基本元部件
压力基础知识简介 1、弹性元件 2、节流元件 3、气容 4、阻容组件 5、喷嘴挡板机构 6、气动功率放大器
压力检测及仪表
压力是工业生产中的重要工艺参数之一。如在 化工、炼油等生产工艺中,经常会遇到压力,包括 高压、超高压和真空度(负压)的测量。
S Y X
S -仪表灵敏度; ΔY -仪表指针位移的距离(或转角); ΔX -引起ΔY的被测参数变化量。
灵敏限表示指针式仪
表在量程起点处,能引起
仪表指针动作的最小被测
×100℃
参数变化值。
对于数字式仪表,则 用分辨率和分辨力表示灵 敏度和灵敏限。
分辨率表示仪表显示值的精细程度。 万分之一。数字仪表的显示位数越多,分辨率越 高。 分辨力是指仪表能够显示的、最小被测值。 如一台温度指示仪,最末一位数字表示的温度值 为0.1℃,即该表的分辨力为0.1℃ 。
例如某台仪表的基本误差为±1.0%,则确认该 表的精确度等级符合1.0级;如果某台仪表的基本误 差为±1.3%,则该表的精确度等级符合1.5级。
例1 某台测温仪表的测温范围为 -100~700℃, 校验该表时测得全量程内最大绝对误差为+5℃, 试确定该仪表的精度等级。
解: 该仪表的基本误差为:
5 100% 0. 625%
= 0. 05M P a100% 0. 625%
8M P a
去掉“±”和“%”号后,0.625介于0.5~1.0之 间。若选精度为1.0级的仪表,其允许的最大绝对 误差为±0.08 MPa 。超过了工艺允许的数值。 故: 应选择0.5级的表。
目前,我国生产的仪表常用的精确度等级有 0.005,0.02,0.05,0.1,0.2,0.4,0.5,1.0, 1.5,2.5等。
700100
将该表的δ去掉“十”号与“%”号,其数 值为0.625。由于国家规定的精度等级中没有0.625 级仪表,而该仪表的误差超过了0.5级仪表所允许 的最大绝对误差。
故:这台测温仪表的精度等级为1.0级。
例2 某台测压仪表的测压范围为 0~8MPa。根据工 艺要求,测压示值的误差不允许超过±0.05 MPa, 问应如何选择仪表的精度等级才能满足以上要求? 解: 根据工艺要求,仪表的允许基本误差为:
而:仪表量程 = 测量上限-测量下限 仪表的基本误差表明了仪表在规定的工作条件 下测量时,允许出现的最大误差。 由外界条件变化引起的误差成为附加误差
1.4 精确度(精度)
为了便于量值传递,国家规定了仪表的精确度 (精度)等级系列。 如0.5级,1.0级,1.5级等。
仪表精度的确定方法:将仪表的基本误差去掉 “±”号及“%”号,套入规定的仪表精度等级系 列。
3 仪表的稳定性
在相同的外界条件下,仪表对同一个测量点 多次测量结果的稳定程度。
仪表精度固然是一个重要指标,但在实际使 用中,往往更强调仪表的稳定性和可靠性
4、响应时间
当用仪表对被测量进行测量时,被测量突然变
化以后,仪表指示值总是要经过一段时间后才能准确
地显示出来。这段时间称为响应时间。
响应时间的计算:
0.05级以上的仪表,常用来作为标准表;工 业现场用的测量仪表,其精度大多为0.5级以下。
仪表的精度等级一般用符号标志在仪表面板 上。如
1.5 回差
y
在外界条件不变的情况下,同
一仪表对被测量进行往返测量时
∆ymax
(正行程和反行程),产生的最大
一、自动化仪表的分类
• 按能源分: — 电动、气动、液动 • 按功能分: — 检测、显示、调节、执行 • 按结构形式分: — 基地式 — 单元组合式:标准信号
气动:0.02MPa~0.1MPa 电动:4mA~20mA DC
二、自动化仪表的主要品质指标
1、仪表的误差 2、仪表的灵敏度 3、仪表的稳定性
主要的参考文献
• 徐善林、崔庆渝编,《轮机自动化》,人民交通出版社 • 郑凤阁编,《轮机自动化》,大连海事大学出版社 • 上海交通大学,《》
第二章 自动化仪表
• 第一节 基础知识 • 第二节 气动变送器 • 第三节 气动显示仪表 • 第四节 气动调节器 • 第五节 气动执行器
第一节 基础知识
一、自动化仪表的分类 二、自动化仪表的主要品质指标 三、气动仪表的基本元部件 四、气动仪表的组成原理
差值与测量范围之比称为变差。
正反行程最大差值
变差 =
×100%
量程
O xmin
xmax
x
造成变差的原因: 传动机构间存在的间隙和摩
擦ห้องสมุดไป่ตู้; 弹性元件的弹性滞后等。
2、灵敏度和分辨率 灵敏度表示指针式测量仪表对被测参数变化的敏 感程度,常以仪表输出(如指示装置的直线位移或角 位移)与引起此位移的被测参数变化量之比表示:
1.2 相对误差 相对误差是指仪表的绝对误差和检测仪表的指
示值之比的百分数。表示为:
相对误差= (Δ / 指示值)*100%
相对误差的大小可以反映仪表的测量准确度
1.3 基本误差和附加误差 基本误差是一种简化的相对误差,又称引用
误差或相对百分误差。定义为:
基 本 误 差 最 大 仪 绝 表 对 量 误 程 差 m ax 100%
轮机自动化基础(ppt 159页)
轮机自动化基础
y
r
y1
y3
Tp
T
TS
• 自动化控制系统的性能要求
C
y(∞) t
轮机自动化基础
y
e
t
t
T
y
T0
t t
• 控制对象的特性 • 调节器的控制规律
本课程的主要内容
• 自动化仪表(14学时) • 自动控制系统(16学时) • 集中监视与报警系统(12学时) • 主机遥控(20学时) • 实验(10学时)
1.1 绝对误差
检测仪表的指示值X与被测量真值X t之间存在 的差值称为绝对误差Δ。表示为:
Δ= |X-X t | 由于真值是无法得到的理论值。实际计算时, 可用精确度较高的标准表所测得的标准值X0代替真 值X t,表示为:
Δ= |X-X 0 | 仪表在其标尺范围内各点读数的绝对误差中最 大的绝对误差称为最大绝对误差Δmax。
从输入一个阶跃信号 x
开始,到仪表的输出信号
y
(即指示值)变化到新稳
态值的95%所用的时间。
tp
t
以上是检测仪表常用的性能指标。
三、气动仪表的基本元部件
压力基础知识简介 1、弹性元件 2、节流元件 3、气容 4、阻容组件 5、喷嘴挡板机构 6、气动功率放大器
压力检测及仪表
压力是工业生产中的重要工艺参数之一。如在 化工、炼油等生产工艺中,经常会遇到压力,包括 高压、超高压和真空度(负压)的测量。
S Y X
S -仪表灵敏度; ΔY -仪表指针位移的距离(或转角); ΔX -引起ΔY的被测参数变化量。
灵敏限表示指针式仪
表在量程起点处,能引起
仪表指针动作的最小被测
×100℃
参数变化值。
对于数字式仪表,则 用分辨率和分辨力表示灵 敏度和灵敏限。
分辨率表示仪表显示值的精细程度。 万分之一。数字仪表的显示位数越多,分辨率越 高。 分辨力是指仪表能够显示的、最小被测值。 如一台温度指示仪,最末一位数字表示的温度值 为0.1℃,即该表的分辨力为0.1℃ 。
例如某台仪表的基本误差为±1.0%,则确认该 表的精确度等级符合1.0级;如果某台仪表的基本误 差为±1.3%,则该表的精确度等级符合1.5级。
例1 某台测温仪表的测温范围为 -100~700℃, 校验该表时测得全量程内最大绝对误差为+5℃, 试确定该仪表的精度等级。
解: 该仪表的基本误差为:
5 100% 0. 625%
= 0. 05M P a100% 0. 625%
8M P a
去掉“±”和“%”号后,0.625介于0.5~1.0之 间。若选精度为1.0级的仪表,其允许的最大绝对 误差为±0.08 MPa 。超过了工艺允许的数值。 故: 应选择0.5级的表。
目前,我国生产的仪表常用的精确度等级有 0.005,0.02,0.05,0.1,0.2,0.4,0.5,1.0, 1.5,2.5等。
700100
将该表的δ去掉“十”号与“%”号,其数 值为0.625。由于国家规定的精度等级中没有0.625 级仪表,而该仪表的误差超过了0.5级仪表所允许 的最大绝对误差。
故:这台测温仪表的精度等级为1.0级。
例2 某台测压仪表的测压范围为 0~8MPa。根据工 艺要求,测压示值的误差不允许超过±0.05 MPa, 问应如何选择仪表的精度等级才能满足以上要求? 解: 根据工艺要求,仪表的允许基本误差为:
而:仪表量程 = 测量上限-测量下限 仪表的基本误差表明了仪表在规定的工作条件 下测量时,允许出现的最大误差。 由外界条件变化引起的误差成为附加误差
1.4 精确度(精度)
为了便于量值传递,国家规定了仪表的精确度 (精度)等级系列。 如0.5级,1.0级,1.5级等。
仪表精度的确定方法:将仪表的基本误差去掉 “±”号及“%”号,套入规定的仪表精度等级系 列。
3 仪表的稳定性
在相同的外界条件下,仪表对同一个测量点 多次测量结果的稳定程度。
仪表精度固然是一个重要指标,但在实际使 用中,往往更强调仪表的稳定性和可靠性
4、响应时间
当用仪表对被测量进行测量时,被测量突然变
化以后,仪表指示值总是要经过一段时间后才能准确
地显示出来。这段时间称为响应时间。
响应时间的计算: