上海交通大学研究生入学考试专业课考试大纲——控制理论基础
上海交通大学机械考研控制理论基础II-机械电子用

(温升值=测得实际温度-环境温度)。
4、操作频率 在单位时间(1小时)内允许操作的最高次数。 5、寿命
School of Mechanical & Power Engineering
上海交通大学机械与动力工程学院
控制理论基础 (II) • 一 开关电器 • 1 刀开关 • 功能:通断电源 • 选型: • 电压 • 电流大于额定 • 工作电流的三倍 •
School of Mechanical & Power Engineering
上海交通大学机械与动力工程学院
控制理论基础 (II)
第一章 绪论
熔断器
功能:串在要保护的 电路中,进行短路 保护和严重的过载保护
选型:额定电压应该大于或等于线路的额 定电压; 额定电流应该大于或等于熔体的 额定电流 (核心)
低压电器:直流1500V以下的电器;交流1200V以 下的电器。
School of Mechanical & Power Engineering
上海交通大学机械与动力工程学院
控制理论基础 (II)
第一章 绪论
低压电器分类
按作用,一般分为两类:低压配电电器、 低压控制电器。 • 低压配电电器 用于输配电系统,典型产 品有:刀开关、自动开关、熔断器等; • 低压控制电器 用于电力拖动控制系统, 典型产品有:继电器、接触器、主令电器等。
控制理论基础 (II)
第一章 绪论
控制按钮 AC 380V DC220V 5A 红色:停止 绿色:启动 选型:触点数,场合,颜色 种类:常开,常闭,复合
School of Mechanical & Power Engineering
上海交通大学机械与动力工程学院
【HIT0704104】上海交大自控原理《自动控制理论基础》教学大纲
《自动控制原理》教学大纲课程名称:自动控制原理Principle of Automatic Control学时:72学分:4先修课程:基本电路理论,拉普拉斯变换适用专业:自动化开课院系:电气工程系电力电子与电力传动教研室教材:《自动控制理论与设计》徐薇莉等编上海交通大学出版社参考书目:《自动控制原理》吴麒编著清华大学出版社《Automatic Control Systems》 B.C.Kuo Prentice-Hall一、课程的性质、地位和任务在现代工程和科学的发展过程中,自动控制起着越来越重要的作用,它是现代工业生产及技术中重要而不可缺少的组成部分。
本课程比较全面地向学生介绍自动控制的基本理论及其工程分析和设计方法,使学生清晰地建立起线性反馈控制系统的基本原理和基本概念,初步学会利用经典控制理论的方法,即利用时域法、频率特性法、根轨迹法等来分析、设计自动控制系统。
本课程是信息工程专业的基础课程。
二、课程内容和基本要求1、绪论建立自动控制系统的一般性概念,了解反馈控制系统的基本组成,自动控制系统的分类,对控制系统的基本要求以及自动控制理论的内容、发展及现状。
2、控制系统的数学模型了解控制系统的几类主要模型:系统微分方程、传递函数、方块图、信号流图以及这些模型的计算方法。
3、物理系统的数学模型了解物理系统,如电学系统、机械系统及其他混合系统的物理规律和数学模型的关系,初步掌握建立物理系统数学模型的基本原理和方法。
4、控制系统的时域分析根据对控制系统的基本要求,掌握控制系统的稳定性分析、稳态响应分析、动态特性分析的内容和基本方法。
5、根轨迹法了解根轨迹的定义和幅值、相角条件,掌握根轨迹的绘制方法以及控制系统的根轨迹分析方法。
6、频率响应法了解控制系统频率特性的定义以及极坐标图、对数频率坐标图、对数幅相图的基本概念和绘制方法,掌握频域的稳定性分析方法—Nyquist稳定性判据,频率响应的系统稳态和动态性能的分析。
上海交通大学 815《控制理论基础》 考研全套电子资料和文本资料明细

1
版1版91术【1.2电赠.赠.型上上子送送上和资海海】】海专料交交部交业大大分大型《机有):控机械】制械【与Q理与纸动Q论动质力:基7力 版学4础工 赠院56》程送2701本】学140校3院年3期h考统末tt研考p试:复研/卷/s试究h多o方生套p3案拟5录62取99绝82密.t名ao单b(【【ao含纸纸.c学质质om/
6. 上海交大《控制理论基础》本校课程精品讲义教案 (出题老师授课, 包含考研重点和典型题目,涵盖第 1-8 和第 10 章,共 110 多页详细版)
8. 上海交大《控制理论基础》本校上课完整电子讲义 PPT 【赠送】
10. 上海交大 考研复试听力内部录音(绝密)
【赠送】
2
室 4.3 上海交大《控制理论基础》考研教材习题答案(王显正版)(共 84 页,电子 工作 版)
研
考 5. 《控制理论基础习题与解答》辅导书 (★新增资料!)
校
英名 (交大 王显正编写,所有重点知识点详细例题和辅导,共 408 页,
Sagiv精
对考研复习超级有用,号称考研题库,很多历年考研题目出自此书,该 书目前已绝版, 电子版邮件发送)
交大王显正编写所有重点知识点详细例题和辅导共对考研复习超级有用号称考研题库很多历年考研题目出自此书该书目前已绝版电子版邮件发送上海交大控制理论基础本校课程精品讲义教案出题老师授课包含考研重点和典型题目涵盖第1上海交大控制理论基础本校上课完整电子讲义ppt赠送上海交大考研复试听力内部录音绝密赠送
.com/ 上海交大 2012 考研 815 控制理论基础 全套电子资料和文本资料明细 obao QQ: 745671433 .ta 82 首页-Sagiv 精英名校考研工作室- 淘宝网 6299 【纸质资料部分有:】 hop35 1. 上海交大《控制理论基础》考研复习大纲 (纸质版)免费 ttp://s 2. 《控制理论基础》历年考研真题试卷(1996-2007, 2009,2010, 33 h 2011 真题试卷) (纸质版)
上海交大81考研控制理论基础课件控制理论基础(I)第3章_频率特性

xc (t) ae jt ae jt A | G( j) | e j(tG( j)) e j(tG( j))
2j A | G( j) | sin(t G( j))
School of Mechanical & Power Engineering
上海交通大学机械与动力工程学院
控制理论基础 (I)
放大环节幅相频率特性
第三章 频率特性
G( j) K
| G( j) | U2 () V2 () K
G( j) tg1 V() tg1 0 0
U()
K
School of Mechanical & Power Engineering
bm an
School of Mechanical & Power Engineering
上海交通大学机械与动力工程学院
控制理论基础 (I)
第三章 频率特性
G( j) Xc ( j) Xr ( j)
G( j) Xc ( j) Xr ( j)
| G( j) || Xc ( j) | Xr ( j)
G( j) A()ej() U() jV()
幅频特性 相频特性 实频特性
A() | G( j) | U2 () V2 ()
() G( j) tg1 V() U ()
U() A() cos()
虚频特性 V() A()sin ()
School of Mechanical & Power Engineering
上海交通大学机械与动力工程学院
控制理论基础 (I)
3.1.3 频率特性的物理意义
第三章 频率特性
上海交通大学816自控考研考前辅导班讲义1-1 绪论
1 R(s) 2 s
27
第四节 对控制系统的要求及典型信号
4. 加速度信号
0 r (t ) 1 2 2 at t0 t0
R(s)
1 s3
5. 谐波信号 6. 指数信号
28
2.温控系统——自动控制
炉子 热电偶 电热丝 _
ub ur
给定信号 _ +
u
电动机 电压 放大器 功率 放大器 + _ 减速器 调压器
220
E
+
21
1-4 反馈控制系统的基本组成
控制目标:要求炉子的温度恒定在期望的数值上。 控制过程:
期望温度 +
u
_
ub
ur
电压放大器
功率放大器
电机、减速器、 调压器
n n -1
d m r(t) d m-1 r(t) dr(t) bm b m-1 b1 b 0 r(t) m m-1 dt dt dt
m
m-1
式中:r(t)——系统输入量; c(t)——系统输出量 主要特点是具有叠加性和齐次性。
15
1-3 自动控制系统的分类
2、非线性系统
特点:在构成系统的环节中有一个或一个以上的非线性 环节。 非线性的理论研究远不如线性系统那么完整,目前尚无 通用的方法可以解决各类非线性系统。
被控 对象
c (t )
输出 信号
反馈信号 反馈元件
主反馈
25
1.5 对控制系统的要求及典型信号
基本要求:
稳定性 稳态特性 动态特性 (稳、准、快)
典型信号:
1. 脉冲信号
0, t 0 r (t ) , t 0
上海交大 自动化 考研 专业课 大纲(816自动控制理论 820微机原理)

《自动控制理论》参考书目:《自动控制理论与设计》(新世纪版) 徐薇莉、曹柱中、田作华编上海交通大学出版社2005;《现代控制理论基础》施松椒、陈学中、杜秀华编著高等教育出版社2005 ;《自动控制原理》胡寿松编著国防工业出版社第四版复习大纲:经典控制部分:第一章、自动控制系统的基本概念;自动控制系统的组成;控制系统常用的典型测试信号;对反馈控制系统的基本要求。
第二章、系统微分方程式的建立;传递函数的定义及求取方法方块图变换的基本法则,转换为信号流图的方法;用梅逊公式求取系统变量间的传递函数。
第三章、实际物理系统数学模型建立;机电控制系统数学模型建立;第四章、反馈控制系统稳定的基本概念;劳斯判据的应用;反馈控制系统稳态误差的概念及求取;控制系统动态性能指标的定义;一阶、二阶系统动态性能指标的求取;掌握主导极点、附加零极点和偶极子的概念;掌握高阶系统简化为二阶系统的条件;掌握速度反馈控制、比例微分、比例积分控制的组成及作用。
第五章、根轨迹的概念;控制系统根轨迹的绘制;利用根轨迹进行系统分析及计算系统性能指标。
第六章、频率特性的定义,求法;极坐标图及伯德图的绘制;利用奈氏判据判别系统稳定性;频域性能指标的定义及求取;由实验曲线求取系统传递函数。
第七章、系统校正的一般方法和基本概念;常用校正网络特性;据原系统特性和期望性能指标正确选择校正网络形式,熟练掌握根轨迹图和频率特性方法,设计超前网络、滞后网络和超前——滞后网络。
第八章、非线性系统描述函数的定义,求取;应用描述函数在极坐标图上判断系统稳定性,是否存在极限环,求取稳定极限环的振幅、频率;相平面图的绘制,利用相平面图对典型非线性系统进行分析;现代控制部分:1. 线性定常系统的状态空间描述、坐标变换(线性变换)及状态方程求解。
2. 线性定常系统的能控性与能观性,标准型以及能控性与能观性分解。
3. 状态空间描述与传递函数的关系,单变量系统的状态空间实现。
上海交大815考研控制理论基础控制本科生控制考试2003A

六、(10%)改进以下系统,使=0.707。
R(s) C(s) 10 s2 颠簸挠动 N(s)
二、(15%)在粗糙路面上行驶的车辆会受到干扰的影响, 采用了能感知前方路况的传感器之后,主动式悬挂 减震系统就可以减轻干扰的影响。简单悬挂减震系 统的例子如图所示,试选取增益K1、K2的恰当取值, + 使得当预期偏移为R(s)=0,且扰动为D(s)=1/s时, 预期偏移 车辆不会跳动。 R(s)
请教师用黑色钢笔或黑色圆珠笔填写
上 控 海 交 论 通 基 大 础 学 I 试 试 卷 题 ( A卷 )
五、(20%)某一单位反馈控制系
统其开环传递函数为
制 理
ቤተ መጻሕፍቲ ባይዱ
Gs
K , s(0.1s 1)(0.2s 1)
姓名:
学号:
班级:
专业:
得分:
一、(20%)某水位控制系统如图, K1为进水阀门的传递系数 Kp为杠杆比,H0为希望水位高,H为实际水位高,
+
K1 K2 + +
车辆动态特性 G(s)
汽车水平面的跳动 Y(s)
七、(10%)某质量—弹簧—阻尼器系统如图a所示.在正弦力的作用下.用实验方法测得它的bode图如图(b) 所示,查表可知=0.32。试求m、b、k 的值.
三、(10%)已知控制系统如图,但不知其主反馈和局部反馈的符号 (+、-、或开脆断路),但系统的阶跃响应曲线可测得。试分 别判断在分别如(a)-(b)响应曲线下的反馈的符号。
R(s) + ? K1 s + ? C(s) K2 s
附拉氏变换表 象函数 原函数 象函数 原函数
x 2 ax1 bx2 cx4 x3 dx2 四、(15%)已知线性方程组 x 4 ex1 fx3 x5 gx3 hx4
2010年上海交大815控制
1) 求误差响应函数 e(t ) 及其拉氏变换 E ( s) ,并画出响应曲线 e(t ) 的大 致形状; 2) 试由此提出一个简单的确定时间常数 T 的方法,并给出相应的计 算公式。 (20 分) 八、 一非最小相位的控制系统如图所示。
第3 页 共4页
上海交通大学 815 控制理论基础 2010 年考研试题
第4 页 共4页
稳定时 K 的取值范围,以此验证上述判据的结果是否正确。 (25 分) 六、 一复合控制系统如图所示, (假定 T0 0 , K0 Kc 0 )
1) 试求系统的稳态位臵误差系数,稳态速度误差系数,稳态加速度 误差系数; 2) 若 T0 1 , K 0 K f 1 , Kc 2 ,试求 r (t ) 1 t t 2 时系统的稳态误差。 (20 分) 七、 一阶反馈系统如图(a)所示, 现欲通过实验确定参数 T。 假定输入信号 如图(b)所示,
四、 以下两个系统方框图中,大写字母均表示传递函数,小写字母均表示 输入或输出信号。试将(a)图所示的系统等价变换为图(b)所示的系统, 求相应的传递函数 P (s) 、Q (s) ; 另外请计算传递函数 C (s) / R(s) 。 (20 分)
五、 一单位反馈(指负反馈,下同)控制系统的开环传递函数为
上海交通大学 815 控制理论基础 2010 年考研试题
上海交通大学
2010 年硕士研究生入学考试试题
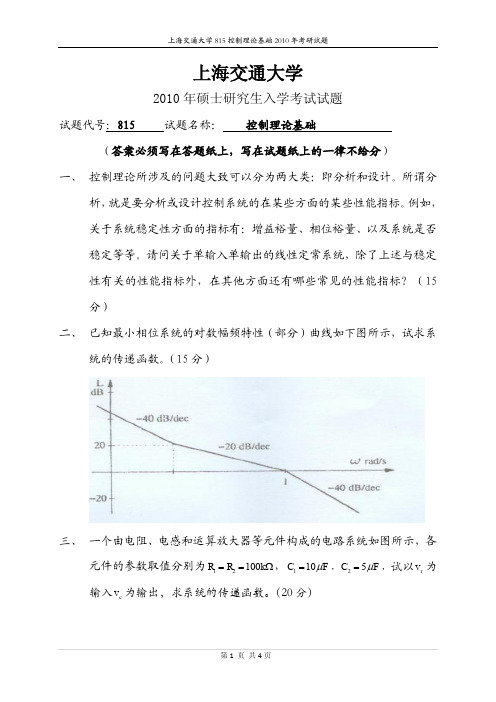
试题代号:815 试题名称: 控制理论基础
(答案必须写在答题纸上,写在试题纸上的一律不给分) 一、 控制理论所涉及的问题大致可以分为两大类:即分析和设计。所谓分 析, 就是要分析或设计控制系统的在某些方面的某些性能指标。 例如, 关于系统稳定性方面的指标有:增益裕量、相位裕量、以及系统是否 稳定等等。请问关于单输入单输出的线性定常系统,除了上述与稳定 性有关的性能指标外,在其他方面还有哪些常见的性能指标?( 15 分) 二、 已知最小相位系统的对数幅频特性(部分)曲线如下图所示,试求系 统的传递函数。 (15 分)