南京航空航天大学2009-2010第二学期现代控制理论考卷
现代控制理论试卷及答案
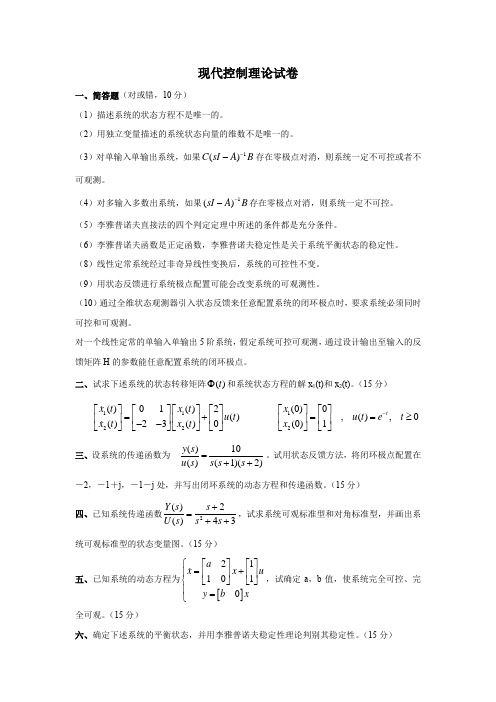
现代控制理论试卷一、简答题(对或错,10分)(1)描述系统的状态方程不是唯一的。
(2)用独立变量描述的系统状态向量的维数不是唯一的。
(3)对单输入单输出系统,如果1()C sI A B --存在零极点对消,则系统一定不可控或者不可观测。
(4)对多输入多数出系统,如果1()sI A B --存在零极点对消,则系统一定不可控。
(5)李雅普诺夫直接法的四个判定定理中所述的条件都是充分条件。
(6)李雅普诺夫函数是正定函数,李雅普诺夫稳定性是关于系统平衡状态的稳定性。
(8)线性定常系统经过非奇异线性变换后,系统的可控性不变。
(9)用状态反馈进行系统极点配置可能会改变系统的可观测性。
(10)通过全维状态观测器引入状态反馈来任意配置系统的闭环极点时,要求系统必须同时可控和可观测。
对一个线性定常的单输入单输出5阶系统,假定系统可控可观测,通过设计输出至输入的反馈矩阵H 的参数能任意配置系统的闭环极点。
二、试求下述系统的状态转移矩阵()t Φ和系统状态方程的解x 1(t)和x 2(t)。
(15分)1122()()012()()()230x t x t u t x t x t ⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦12(0)0,(),0(0)1tx u t e t x -⎡⎤⎡⎤==≥⎢⎥⎢⎥⎣⎦⎣⎦ 三、设系统的传递函数为()10()(1)(2)y s u s s s s =++。
试用状态反馈方法,将闭环极点配置在-2,-1+j ,-1-j 处,并写出闭环系统的动态方程和传递函数。
(15分) 四、已知系统传递函数2()2()43Y s s U s s s +=++,试求系统可观标准型和对角标准型,并画出系统可观标准型的状态变量图。
(15分)五、已知系统的动态方程为[]211010a x x uy b x ⎧⎡⎤⎡⎤=+⎪⎢⎥⎢⎥⎨⎣⎦⎣⎦⎪=⎩,试确定a ,b 值,使系统完全可控、完全可观。
(完整版)哈尔滨工业大学2010《现代控制理论基础》考试题B卷及答案

现代控制理论基础试题B答案班号姓名题号-一--二二三四五六七八卷面分作业分实验分总分满分值10 10 10 10 10 10 10 10 80 10 10 100 得分值注惫行为规范一•(本题满分io分)请写出如图所示电路当开关闭合后系统的状态方程和输出方程。
其中状态变量的设置如图所示,系统的输出变量为流经电感L2的电流强度。
遵守考场纪律|黑【解答】根据基尔霍夫定律得:L1& R X!X3 uL2X2R X2 X3CX3 X2人&R 1 1X i X3 uL i L1 L1XR 1改写为X2L2X3L2 ,输出方程为y X2X3 \ C1X2C C写成矩阵形式为页)哈工大2010年春季学期所以状态空间表达式为.(本题满分10分)x& X& X&L 1L 2L 2X 1 X 2 X 3单输入单输出离散时间系统的差分方程为y(k 2) 5y(k 1) 3y(k)回答下列问题:(1) 求系统的脉冲传递函数; (2) 分析系统的稳定性;(3)取状态变量为儿(k) y(k),X 2(k) X 1(k(4)分析系统的状态能观性。
【解答】(1)在零初始条件下进行变换有:5z 3 Y(z)系统的脉冲传递函数:Y(z) R(z)5z 3 (2)系统的特征方程为D(z)特征根为 Z 14.3 , Z 2 0.7X i X 3r(k L 11) 2r(k)1) r(k),求系统的状态空间表达式;5z 31,所以离散系统不稳定X 2(k 1) X 1(k 2)r(k 1)y(k 2)r(k 1) 由已知得y(k 2) r(k 1)2r(k) 5y(k1) 3y(k) 2r(k) 5X 1(k 1) 3X 1(k)2r(k) 5 X 2(k) r(k)3%(k)3X ,(k) 5x 2(k)3r(k)于是有:X 2(k 1)3X 1(k) 5X 2(k) 3r(k)x ,(k 1)X 2(k) r(k)(3)由 X 1(k)x,k 1) r(k),可以得到 y(k),X 2(k)又因为x i (k 1) 0 1 x i (k) 1 r(k)X 2(k 1) 35 X 2(k)3y(k) 1 0仙X 2(k)(4)系统矩阵为0 1 1 0 0 135G 01,输出矩阵为c 351 0,cGc1 能观性矩阵为Q o C' cG0 0,ran kQ o 12,系统兀全冃匕观。
全国名校自动控制原理考研真题汇编(含部分答案)
2013年中国 学技术大学848 动控制原理
2014年中国 学技术大学848 动控制原理
5.北京
天大学 动控制原பைடு நூலகம் 合
2012年北京
天大学931 动控制原理 合
2013年北京
天大学931 动控制原理 合
2014年北京
天大学931 动控制原理 合
6.山东大学 动控制原理
2016年山东大学847 动控制原理(含现代控制理 )
8.其他院校自动控制原理考研 真题(含部分答案)
2010年华中科技大学829自动控制原理考研真 题及答案
2011年南京大学961自动控制原理考研真题
2011年重庆大学839自动控制原理一考研真题
2013年厦门大学844自动控制原理考研真题
2013年华南理工大学813自动控制原理考研真 题
2014年华南理工大学813自动控制原理考研真 题
2015年华南理工大学813自动控制原理考研真 题
2016年华南理工大学813自动控制原理考研真 题
2017年华南理工大学813自动控制原理考研真 题
2018年华南理工大学813自动控制原理考研真 题
2012年电子科技大学839自动控制原理考研真 题及详解
参 案:
2013年电子科技大学839自动控制原理考研真 题及详解
参 案:
2014年电子科技大学839自动控制原理考研真 题
4.中国科学技术大学自动控制 原理考研真题
2013年中国科学技术大学848自动控制原理考 研真题
6.山东大学自动控制原理考研 真题
2016年山东大学847自动控制原理(含现代控 制理论)考研真题
2017年山东大学847自动控制原理(含现代控 制理论)考研真题
最新南京航空航天大学-第二学期现代控制理论考卷

10分) ( ) ()()Ax t Bu t +,离散化后的状态方程为与采样时间T 无关。
( )( ) ( ) ( ) ( )( ) ( ) ( ) ( )10分)22222222t tt t At t tt t e e e e e e e e e --------⎡⎤--=⎢⎥-+-+⎣⎦,则系,则系统不可控不可观测的动态方程实现为: 输出方程1 2 3 4 5 6 7 83x x x x x x x x-⎤⎡⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢=⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎢⎥⎣⎦6116816y y y y u u u+++=++,四、已知系统的状态空间表达式为:[]201(),()11031u t y t x -⎡⎤⎡⎤=+ =⎢⎥⎢⎥-⎣⎦⎣⎦x x ,试求系统在输入1.5(),0t u t e t -=≥作用下如何选取初始状态()0x 使得系统的输出()0y t =。
五、已知控制系统如图所示。
1) 写出以1x ,2x 为状态变量的系统状态方程与输出方程。
值时,系统能控或能观。
3) 求系统的传递函数()G s 。
六、已知系统[]0011()103()1()0130()012()x t x t u t y t x t -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦=- 判断该系统是否能控。
若不能控,则将系统按能控性进行分解。
七、已知系统状态方程为0111x x⎡⎤=⎢⎥--⎣⎦,试应用李雅普诺夫方程,求当Q=I时的P阵,并判断系统的稳定性。
八、已知系统的开环传递函数为10()(1)(10)G ss s s=++,(1)试设计状态反馈控制律,将闭环极点配置在10,1j--±处;(2)试分析经状态反馈设计后,系统动态性能和稳态性能的变化。
九、已知系统,x Ax Bu y Cx =+=是完全能观的,设计如下图所示的观测器,(1)试给出状态观测器的状态空间模型;(2)试给出一种观测器的设计方法;(3)简述观测器的作用。
2009-2010学年第二学期《现代控制理论》考试题A卷_参考答案

2e−t =2e−2t
− e−2t − 2e−t
e−t − e−2t 1
2e−2t
− e−t
1
t 2e−(t −τ ) − e−2(t −τ )
∫+ 0 2e−(t−τ ) − 2e−2(t−τ )
e−(t −τ ) 2e−2(t −τ
−e )−
−2(t −τ )
0 1 0 0
x =−2 −3
0
x
+
1
u,
y =[1 0 1] x
−1 1 −3 2
Please draw the state structure diagram and calculate the transfer function.
解:(1)画模拟结构图的步骤:
= [1
0
1]
(s
+ 1)( s
1 +
2)(s
+
3)
−2(s + 3) −s − 5
s(s + 3) s −1
0
1
s(s + 3) + 2 2
= = 2s2 + 8s + 6 2 (s +1)(s + 2)(s + 3) s + 2
三、(10 分)已知差分方程为:
长安大学 2009-2010 学年第 2 学期 试题( A )卷 现代控制理论基础标准答案及评分标准
一、(10 分)已知系统的传递函数:
W (s) = 10(s −1) s(s +1)(s + 3)
求出系统的约旦标准型实现(并联分解法)。
解: G(s)= 10(s −1) = −10 3 + 10 + − 20 3 s(s +1)(s + 3) s s +1 s + 3
南京航空航天大学920自动控制原理(专业学位)2012—2018年考研真题试题

L(ω) [−40]
[−20] 50
ω
2
10
[−40]
图3
920 自动控制原理(专业学位) 第 2 页 共 4 页
科目代码:920 科目名称:自动控制原理 第 1 页 共 4 页
R(s) − C(s) )。
三.(本题 15 分) 设某单位负反馈系统开环传递函数为
G(s)
=
s(s
K*
+ 1)(s
+
2)
试概略绘制 K * 从 0 → ∞ 变化时的闭环根轨迹,并求临界根轨迹增益及该增益对应的 三个闭环极点。
四.(本题 15 分) 设某单位负反馈系统开环传递函数为 G(s) = K s(s + a)
南京航空航天大学 2012 年硕士研究生入学考试初试试题ď A ྄Đ
科目代码: 920 科目名称: 自动控制原理(专业学位) 满分: 150 分
注意: ①认真阅读答题纸上的注意事项;②所有答案必须写在答题纸上,写在本试题纸或
草稿纸上均无效;③本试题纸须随答题纸一起装入试题袋中交回!
本试卷共 10 大题,满分 150 分。 一. (本题 15 分) 用梅逊公式求图 1 所示系统的闭环传递函数 C(s) 和 C(s) 。
10
s(s + 2)(s + 5)
1. 设计状态反馈控制律,将闭环极点配置在 − 5,−1 ± j 处; 2. 分析经状态反馈设计后,系统动态性能和稳态性能的变化。
南京航空航天大学820自动控制原理2012—2018年考研真题试题

r(t)
20
c(t)
s(0.2s +1)
Kts
图2
三. (本题 15 分) 已知某单位负反馈二阶系统,其开环极点数大于开环零点 数,在输入信号 r(t) = 1 + 2t + 3t 2 时,系统稳态误差 ess = 0.2 ,试求该系统
截止频率ωc = 10 时的相角裕度 γ 。
820 自动控制原理 第 1 页 共 4 页
1. 请概略绘制系统的开环对数频率特性曲线(波德图),并判定使系统闭环 稳定的 K 值范围; 2. 绘制 K 从 0 → ∞ 时闭环特征根的轨迹,利用波德图中信息给出根轨迹穿 过 S 平面虚轴时的 K 和 ω 。
六. (本题 15 分) 系统结构图如图 4 所示( K1 、 K 2 、T 均大于零) 1. 当 Gc (s) = 1时,试判断系统的稳定性; . 2. 若系统不稳定,加入校正网络 Gc (s) = τs + b ,试求此时使系统稳定τ 和 b 应满足的条件。
πA 1.分析周期运动的稳定性; 2.求出稳定周期运动的振幅 A 和频率 ω 以及 c(t) 表达式。
图6
九. (本题 15 分) 某系统的状态空间模型为 x&1(t) = −x1(t) + 5x2 (t) x&2 (t) = −6x1(t) + u(t) y(t) = x1(t)
现采用状态反馈控制策略,即 u(t) = −k1x1(t) − k2x2 (t) + r(t) ,其中 k1,k2 为实常数,
N (s)
R(s)
C(s)
G1 ( s )
G2 (s)
图1
二. (本题 15 分) 某系统的结构图如图 2 所示,要求: 1. Kt = 0 时,求系统在单位阶跃输入信号作用下的时域动态性能指标,超 调量σ % 和调节时间 ts ( Δ = 5% ),并概略绘出单位阶跃响应曲线 h(t) ; 2. 接上测速反馈 Kt s ,要求阻尼比ξ = 1 ,试确定 Kt 值,此时σ % = ? ,ts = ? , 并概略绘出单位阶跃响应曲线。
现代控制理论试题与答案

现代控制理论试题与答案《现代控制理论参考答案》第一章答案1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:令,则所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式‘画出其模拟结构图求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A 的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10分) ( )
()()Ax t Bu t +,离散化后的状态方程为
与采样时间T 无关。
( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
10分)
22222222t t
t t At t t
t t e e e e e e e
e e --------⎡⎤
--=⎢⎥-+-+⎣⎦
,则系,则系统不可控不可观测的动态方程实现为: 输出方程
四、已知系统的状态空间表达式为:
[]201(),()11031u t y t x -⎡⎤⎡⎤=+ =⎢⎥⎢⎥-⎣⎦⎣⎦
&x x ,试求系统在输入
1.5(),0t u t e t -=≥作用下如何选取初始状态()0x 使得系统的输出()0y t =。
五、已知控制系统如图所示。
1) 写出以1x ,2x 为状态变量的系统状态方程与输出方程。
2) 试判断系统的能控性和能观性。
若不满足系统的能控性和能观性条件,问当1K 与2K 取何值时,系统能控或能观。
3) 求系统的传递函数()G s 。
六、已知系统
[]0011()1
03()1()0130()0
12()
x t x t u t y t x t -⎡⎤⎡⎤
⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦=-& 判断该系统是否能控。
若不能控,则将系统按能控性进行分解。
七、已知系统状态方程为
01
11
x x
⎡⎤
=⎢⎥
--
⎣⎦
&,试应用李雅普诺夫方程,
求当Q=I时的P阵,并判断系统的稳定性。
八、已知系统的开环传递函数为
10
()
(1)(10)
G s
s s s
=
++
,(1)试设计
状态反馈控制律,将闭环极点配置在10,1j
--±处;(2)试分析经状态反馈设计后,系统动态性能和稳态性能的变化。
九、已知系统,x Ax Bu y Cx =+=&是完全能观的,设计如下图所示的
观测器,(1)试给出状态观测器的状态空间模型;(2)试给出一种观测器的设计方法;(3)简述观测器的作用。
x Ax Bu y Cx
=+=ˆˆx
Ax Bu =+
十、已知系统状态方程及初始条件为()()()x t x t u t =-+&,(0)1x =,
()1u t ≤,试求使性能指标101()2
J x u dt =-⎰为极小的最优控制)(t u *
和最
优轨线)(t x *。