自动控制系统课件第三章根轨迹分析法(本章四次课)
合集下载
自动控制原理根轨迹PPT课件

m
szj
K * j1
1
n
s pi
i 1
(4-11)
m
s
z
j
n
s
pi
2k
1
(4-12)
j 1
j 1
式中 k 0,1,2,
第11页/共102页
复平面上的s点如果是闭环极点,那么它与开环零、极点所组成的向量必须满足上式的模值条件和相角 条件。
从上式可以看出,根轨迹的模值增益条件与根轨迹增益K*有关,而相角条件与K*无关。我们说,相角条 件是确定s平面上根轨迹的充分必要条件,这就是说,绘制根轨迹时,可用相角条件确定轨迹上的点,用模值 条件确定根轨迹上该点对应的K*值。
式中 K * K 2
是根轨迹增益。
第21页/共102页
令A(s)=s+4,B(s)=(s+1)(s+2)=s2+3s+2,则A’(s)=1,B’(s)=2s+3。代入A’(s)B(s)-A(s)B’(s)=0中, 得s2+8s+10=0 解出上式的根为s1≈-1.55,s2≈-6.45。 根据规则2,根轨迹在实轴上的分布为[-∞,-4]和[-2,-1],从而可知s1是实轴上的分离点,s2是实轴上的汇合 点。 分离点和汇合点处的根轨迹增益分别为:
第22页/共102页
K* d1
B(s) A(s)
(s 1)(s 2) s4
s1.55
0.1
K* d2
B(s) A(s)
(s 1)(s 2) s4
s6.45
9.9
规则6 根轨迹与虚轴的交点。若根轨迹与虚轴相交。则交点上的K*值和ω值可用两 种方法求得。
(1)劳斯判据; (2)令闭环系统特征方程中的s=jω ,并令虚部和实部分别为零而求得。
根轨迹法(自动控制原理)ppt课件精选全文完整版

1 K (s z1 )( s z2 )....( s zm ) 0 (s p1 )( s p2 )....( s pn )
课程:自动控制原理
第4章 根轨迹法
➢ 以K为参变量的根轨迹上的每一点都必须满足以上方程, 相应地,称之为‘典型根轨迹方程’。
也可以写成
m
n
(s zl ) K (s pi ) 0
可见,根轨迹可以清晰地描绘闭环极点与开环增益K之间的 关系。
课程:自动控制原理
第4章 根轨迹法
2.根轨迹的基本条件
❖ 考察图示系统,其闭环传递函数为:
Y(s) G(s) R(s) 1 G(s)H(s)
闭环特征方程为:
1 G(s)H(s) 0
➢ 因为根轨迹上的每一点s都是闭环特征方程的根,所以根轨 迹上的每一点都应满足:
l 1
i 1
对应的幅值条件为:
相角条件为:
n
( s pi ) K i1
m
(s zl )
l 1
m
n
(s zl ) (s pi ) (2k 1)180
k 1,2,
l 1
i 1
课程:自动控制原理
第4章 根轨迹法
❖ 上述相角条件,即为绘制根轨迹图的依据。具体绘制方法 是:在复平面上选足够多的试验点,对每一个试验点检查 它是否满足相角条件,如果是则该点在根轨迹上,如果不 是则该点不在根轨迹上,最后将在根轨迹上的试验点连接 就得到根轨迹图。
显然,位于实轴上的两个相邻的开环极点之间一定有分离 点,因为任何一条根轨迹不可能开始于一个开环极点终止 于另一个开环极点。同理,位于实轴上的两个相邻的开环 零点之间也一定有分离点。
课程:自动控制原理
第4章 根轨迹法
课程:自动控制原理
第4章 根轨迹法
➢ 以K为参变量的根轨迹上的每一点都必须满足以上方程, 相应地,称之为‘典型根轨迹方程’。
也可以写成
m
n
(s zl ) K (s pi ) 0
可见,根轨迹可以清晰地描绘闭环极点与开环增益K之间的 关系。
课程:自动控制原理
第4章 根轨迹法
2.根轨迹的基本条件
❖ 考察图示系统,其闭环传递函数为:
Y(s) G(s) R(s) 1 G(s)H(s)
闭环特征方程为:
1 G(s)H(s) 0
➢ 因为根轨迹上的每一点s都是闭环特征方程的根,所以根轨 迹上的每一点都应满足:
l 1
i 1
对应的幅值条件为:
相角条件为:
n
( s pi ) K i1
m
(s zl )
l 1
m
n
(s zl ) (s pi ) (2k 1)180
k 1,2,
l 1
i 1
课程:自动控制原理
第4章 根轨迹法
❖ 上述相角条件,即为绘制根轨迹图的依据。具体绘制方法 是:在复平面上选足够多的试验点,对每一个试验点检查 它是否满足相角条件,如果是则该点在根轨迹上,如果不 是则该点不在根轨迹上,最后将在根轨迹上的试验点连接 就得到根轨迹图。
显然,位于实轴上的两个相邻的开环极点之间一定有分离 点,因为任何一条根轨迹不可能开始于一个开环极点终止 于另一个开环极点。同理,位于实轴上的两个相邻的开环 零点之间也一定有分离点。
课程:自动控制原理
第4章 根轨迹法
根轨迹法优秀课件

系统性能改善不显著, 系统增益超过临界值 时,系统仍会不稳定。
闭环复数极点距离虚轴较远, 实数极点距离虚轴较近,系 统有较低的响应速度。
开 环 零 点 在 不 同 取 值 情 况 下 的 根 轨 迹
17
从以上四种情况来看,一般第三种情况比较理想,这 时系统具有一对共轭复数主导极点,其暂态响应性能指标 也比较令人满意。
点的零、极点对来改善系统的稳态性能。这对零、极点彼此
相距很近,又非常靠近原点,且极点位于零点右边,通常称
这样的零、极点对为偶极点对或偶极子。
在系统中附加下述网络
1
s 1 T
s 1
1 0
T
若上述网络的极点和零点彼此靠得很近,即为偶极子。
32
例4-15 系统的开环传递函数为
WK
(s)
s(s
1.06 1)( s
由根轨迹求出闭环系统极点和零点的位置后,就可以按 第三章所介绍的方法来分析系统的暂态品质。
4
1. 二阶系统 设二阶系统的结构图如下图所示。它的开环传递函数为
WK
(s)
KK s(1 Ts)
Kg s(s
1
)
T
5
(1)闭环系统有两个负实极点 暂态过程主要决定于离虚轴近的极点。 一般当时 R2 5R1,可忽略极点 R2的影响。
2
用根轨迹图分析控制系统的稳定性,比仅仅知道一组闭环极点 要深刻得多。
比如,当Kg在(0,∞)间取值时,如果n支根轨迹全部位于虚 轴的左边,就意味着不管Kg取任何值闭环系统都是稳定的。
反之,根轨迹只要有一支全部位于虚轴的右边,就意味着不管
Kg取何值,闭环系统都不可能稳定,这种情况下,如果开环
零、极点是系统固有的、不可改变的,那么要使系统稳定就 必须人为增加开环零、极点,这就是通常讲的要改变系统的 结构,而不仅仅是改变系统的参数。
4-4 第四节 控制系统的根轨迹分析法 自动控制原理课件

1
s2
k
s
2
,闭环方块
图如下图(a)所示,系统B的闭环方块图如下图(b)所示。
R(s)
s 1
k
C(s) R(s)
k
C(s)
s2(s 2)
s2(s 2)
s 1
图(a) A系统
图(b) B系统
根轨迹相同的系统,开环传递函数和闭环极点都相同,但 闭环零点却不一定相同。
[例4-16]:已知单位反馈系统的根轨迹如下图所示。 (1)写出该系统的闭环传递函数; (2)试用适当的方法使系统在任意K值时均处于稳定的状态。
闭环特征方程为:s2s2kg 0,当s=0时,kgp 2 ,所以,系 统稳定的条件是:kg 2
二、瞬态性能分析和开环系统参数的确定
利用根轨迹可以清楚的看到开环根轨迹增益或其他开环系
统参数变化时,闭环系统极点位置及其瞬态性能的改变情况。
以二阶系统为例:开环传递函数为 Gk
闭环传递函数为
(s) s2
解得:kg 44
k ( i s 1)
开环传递函数以G k (s)
i 1 n
的形式表示时,k称为开环放
大系数。
(T j s 1)
j 1
显然 k与k g 的关系为:k kg
zi ,式中 p j 不计0极点。 pj
所以,开环放大系数:k 44 1.83
46
由于闭环极点之和等于开环极点之和,所以另一个闭环极点
为:p3 7.6
[特别提示]:开环零、极点对根轨迹形状的影响是值得注意的。
一般说,开环传递函数在s左半平面增加一个极点将使原根轨 迹右移。从而降低系统的相对稳定性,增加系统的调整时间。
Gk
(s)
(自动控制原理)4.4利用根轨迹分析系统性能

根轨迹的特点和规律
根轨迹具有以下特点和规律: • 根轨迹是一条连续的曲线,代表了特征方程根的轨迹 • 根轨迹始终位于系统开环增益与相位的交点上 • 根轨迹趋近于无限远点的方向,表示系统的稳定性 • 根轨迹与该点的对称位置具有相同的特性
利用根轨迹评价系统性能
根轨迹可以评估系统的稳定性和动态响应性能,通过观察根轨迹的形状和位置,可以得出以下结论:
根轨迹的概念
根轨迹是反映闭环控制系统特征方程根随参数变化而变化的图形。通过观察 根轨迹可以分析系统的稳定性、动态响应和频率响应特性。
如何绘制根轨迹
绘制根轨迹的步骤如下: 1. 得到系统的特征方程 2. 使用根轨迹的绘制规则和技巧,画出根轨迹的大致形状 3. 通过调整系统参数,绘制出完整的根轨迹图形
自动控制原理 4.4 利用根 轨迹分析系统性能
自动控制系统的性能对于系统的稳定性和响应速度至关重要。本章将介绍根 轨迹方法,用于绘制系统的根轨迹图,并利用根轨迹图评估系统的稳定性和 动态响应性能。
系统性能的定义
系统性能是指系统对于输入信号的响应质量和稳定性。主要包括以下几个方 面:时间响应特性、频率响应特性、稳定性和误差特性。
结论和要点
1 根轨迹是分析系统
性能的重要工具
根轨迹反映了系统的稳 定性和动态响应性能。
2 根轨迹的绘制方法
可以通过特征方程和绘 制规则来绘制根轨迹。
3 根轨迹的应用
根轨迹分析在实际控制 系统中具源自广泛的应用。稳定性如果根轨迹位于左半平面,则系统是稳定的。
动态响应
根轨迹的形状和位置可以反映系统的响应速 度和超调量。
频率响应
根轨迹的形状和位置可以反映系统的频率响 应特性。
稳定裕度
根轨迹与虚轴的交点距离表示系统的稳定裕 度。
控制系统的根轨迹分析法资料PPT课件

由:
D' (s)
k gd
N '(s)
|s d
可以求得分离点s=-2.3557 。
近似求法:分离点在[-4,0]之间。
s0
-0.5 -1 -1.5 -2.0 -2.5 -3 -3.5 -4
kgd 0
1.628 3
5.971 8.80 9.375 7.457 3.949
kgd 的最大值为9.375,这时s=-2.5,是近似分离点。 第12页/共43页
s3
-7.6 -6 -4
Im
s1 2.08
-1.2
Re
0
s2 -2.08
(1) 判断闭环极点-1.20±j2.08是不是系统的主导极点: Im
Gk (s1 ) 1 2 3 s1 (s1 4) (s1 6)
s1 2.08
(180 tg 1 2.08 tg 1 2.08 tg 1 2.08 ) 180
对应根轨迹增益的计算:
|
s(s
kg 4)( s
6)
| 1 s1.2 j 2.08
k g 44
第20页/共43页
4.4.3 利用根轨迹估算系统的性能
(2) 估算系统的性能指标:
系统的闭环传递函数为
(s)
44
(s 1.2 j2.08)(s 1.2 j2.08)(s 7.6)
化简为
(s)
利用根轨迹可以清楚的看出开环根轨迹增益或其他开环系
统参数变化时,闭环系统极点位置及其瞬态性能的改变情况。
以二阶系统为例:开环传递函数为 Gk
闭环传递函数为(s)
s2
n2 2 n s
n2
(s)
n2 s(s 2
)
自动控制原理根轨迹法PPT课件PPT课件

23
第23页/共69页
4.3 绘制根轨迹的基本规则
24
又,渐近线上,对于s =sk → ∞,相当于有-zoi=-poj=sA
m
则
(s zoi )
j
Asymptote Centroid
G(s)H (s) Kg
i 1 n
(s poj )
j 1
s
(
s
Kg
sA
)
nm
(4.16)
由二项式定理
sA s A
-poj : 开环(传函的)极点, j=1,2,..,n.
3
第3页/共69页
4.2 根轨迹的基本概念
于是,特征方程
m
(s zoi )
1 G(s)H (s) 1 Kg
i 1 n
0
(s poj )
j 1
(4.3)
根轨迹法:根据开环传函(开环零点、极点),找出开环增益 (或别的某个参数)由0→∞变化时,闭环系统特征根的轨迹。 根轨迹法的基本思想:开环传函等于-1的s值,必为特征根。
<例4.1>:绘制某二阶系统 的根轨迹图;
特征方程: s2 2s K s2 2n n2 0 特征根: s1, s2 n n 2 1 1 1 K
K由0→1变化时,特征根 s1,s2: K= 0, s1= 0 , s2 = -2;
K= 1, s1 = s2 = -1 ( = 1); 0<K<1,( >1), s1,s2:为两个实根
对于一阶二阶系统很容易在它的根轨迹上确定对应参数的闭环极点对于三阶以上的高阶系统通常用简单的作图法如作等阻尼比线等求出系统的主导极点如果存在的话将高阶系统近似地简化成由主导极点通常是一对共轭复数极点构成的二阶系统最后求出其各项性能指标
自控原理根轨迹PPT课件
q
h
(S
i 1
Pi
)
(S
j 1
Pj
)
nqh mf l
k kGkH
f
h
(S) KG
(S
i 1
Zi
)
(S
j1
Pj
)
n
m
(S
i 1
Pi
)
K第1j51页( S/共14Z7页j )
C(s)
结论: (1)闭 环 系 统 根 轨 迹 增 益 ,等 于 开 环 系 统 前 向 通根道轨 迹
增 益; 对 于 单 位 反 馈 系 统,闭 环 系 统 根 轨 迹 的 增就 益等 于 开 环 系统 根 轨 迹 的 增 益.
于虚轴的
第7页/共147页
[总结]当 kg 从0变化到 时,系统的根
轨迹是连续的。 kg 0 的点称为起点, kg 的点称为终点。本例中有两个分
支,终点都在无穷远处。
这里是用解析法画出的根轨迹,但对于 高阶系统,求根困难,需用图解法画图。
j1
kg
s1
A s
A'
kgB 01 A2 0.5
i 1 n
(s pj )
j 1
式中:kg 传递系数,或称为跟轨迹增益;
zi,p j为开环零极点。
第3页/共147页
系统的结构图如下:
R(s)
G(s)
C(s)
闭环传递函数为:(s) G(s)
1 G(s)H (s)
-
H (s)
开环传递函数为:Gk (s) G(s)H(s) m
(s zi )
将Gk (s)写成以下标准型,得:Gk (s) kg
G(S )H (S ) 1 G(S )H是(复S变)量S的函数,根据上式两边的幅值和相角分别相等的条件,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
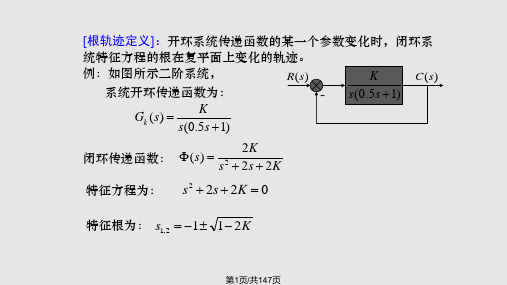
自动控制系统课件第三章根轨迹分 析法(本章四次课)
第一节 根轨迹的基本概念
一、根轨迹定义:特征方程中某待定参数从0-∞发生 变化时,特征根随之行走的轨迹。
二、简单系统根轨迹的绘制举例
(
1G k )(
s )k ( s 2
; )
(
2G k )(
s )k s (2 s)
三、根轨迹与系统性能之间的关系
1、稳定性——系统所有特征根在S平面的位置 2、稳态性能——系统型别、开环增益 3、动态性能——确定主导极点及其位置
i1
j1
jb
举例 G k (: s s) (3 K * s (2 ) s 2 2 ( s )2 s; )G k ( s (K ) 2 s * (2 s 2 5 s))
开环零极点与闭环极点特性
m
Kg (szi)
n
n
m
1Gk( s)1
i1 n
0 (ssj) (spj)Kg (szi)
(spj)
j1
j1
Байду номын сангаас
i1
j1
n
n
当n-m≥2时,闭环极点之和等于开环极点之和,即
sj pj
j1
j1
n
n
m
闭环极点之积和开环零、极点有如下关系: sj pj Kg zi
j1
j1
i1
举
例k(: s)sG(s 1 k*)(2s )1
K*6 ω2
求另一闭环极点
当n-m≥2时根轨迹分布规律:对称放射性分布。
二、根据开环零极点分布,绘制根轨迹草图。 1、复平面上两个极点、实轴上一个零点; 2、复平面上两个极点、实轴上两个零点; 3、复平面上两个极点和两个零点; 4、复平面上两个零点、实轴上两个极点。
三、 已知系统开环, 传绘 递制 函一 数般根定 轨特 迹殊 ,点 确的参
1
)Gk(
s)s2(
k s2
2)
2
)G k(
s)k
(s4 ) (3s;) s (s2 )
4 )G k( s)(k s 2( 2s4 s22 ) ;)
课后练习二
一、简答题: 1、根轨迹与虚轴交点坐标及参数的计算方法有几种?简述计算依据及步骤。 2、根轨迹与虚轴交点对应的K值在系统性能分析中的作用是什么? 3、两个极点、两个或一个零点在复平面上有根轨迹时,复平面上根轨迹的 形式如何?复平面上根轨迹的绘制规则又是什么? 4、“根据开环零极点分布绘制闭环系统的根轨迹,研究的是闭环系统的性 能。”这句话对否?
一、根轨迹的分支数——开环极点数、特征根个数。
二、根轨迹的连续性和对称性——连续,复平面上根轨迹对称于实轴。
三、根轨迹的起点和终点——起于开环极点,终于开环零点或无穷远。
四、根轨迹在实轴上的分布规律——奇偶分布特性。
五、根轨迹的渐近线——坐标:
n
m
pj zi
六、根轨迹的重合点(重根) δa j1
典型开环零极点分布对应的典型根轨迹
开环传递函数含有两个极点和一个或两个零点,则 若复平面上有根轨迹,根轨迹一定是圆或圆弧。
简单绘制方法:依据复平面上的对称性和圆的直径画圆;已知根轨 迹上的三点画圆。
应用举例
1
)G k(
s)k s
(s4;) (s2 )
3 )G k( s)(ks 2( s4 4;))
第二节 一般根轨迹的绘制依据
一、特征方程的一种演变形式——根轨迹方程
m
m
K* ( szi)
K * (s zi)
Gk( s) G( s ) H( s )ni1
( spj) j1
1Gk( s) 0
根轨迹方程:
i1 n
1
(s pj)
j1
k根轨迹增益、n极点个数、m零点个数、-pj极点坐标、-zi零点坐标。
二、根轨迹方程的幅值条件和相位条件 回顾—S平面矢量的表示形式
幅值条件:
m
s zi
i 1 n
1 K*
spj
j 1
相角条件:
m
n
( szi) ( spj)( 21 l ) π( l 0,1,2 )
i1
j1
第三节 一般根轨迹的绘制法则
负反馈系统根轨迹增益k*由0→+∞变化时的
根轨迹,称为一般根轨迹。
;
2
)Gk(
s)(
k s2
3)
;
3
)Gk(
s)s
k (s1 ) (2s4 s5
; )
4
)Gk(
s)k
(2s2 s2 s (s2 )
);
根轨迹的出射角和入射角
m
n
相 角 条 ( s z 件 i) : ( s p j) ( 2 1k)(π k 0 1 , 2 , )
i 1
j 1
m
n
出 射θ 角 pa(: 21 k )π (pazi) (papj)
i1
j1
ja
n
m
入 射z 角 b(: 21 kθ)π (zbpi) (zbzj)
利用ROUTH判据可以求解!
举例:
Gk(
s) s
k* (s1 ) (s2
1 )
课后练习一
一、简答题: 1、根轨迹方程与特征方程的区别是什么? 2、怎样检验复平面上的点是否在根轨迹上? 3、怎样确定根轨迹上确定点的K值? 4、根轨迹箭头所指的方向是K增加还是减小的方向?
二、根据开环零极点分布,绘制根轨迹草图。 1、两个极点、一个零点在实轴上的不同分布位置; 2、两个极点、两个零点在实轴上的不同分布位置; 3、三个极点、一个零点在实轴上的不同分布位置。
s
)
P
(sQ)
(
sP)(
s
) 0
K*( 重 合 点 时 , 根 益 轨 的 迹 取 增 值 )
s1,( 2 重 合 点 坐 标 )
分离角的确定:θd
三重根的确定
180 L
0
举例:
Gk (s)
k s(s
2)
1
Gk (s)
k(s 2) s(s 1)
1
根轨迹与虚轴的交点
令 : jsω带 入 特 征1方 Gk(程 jω 得 0): I Rm e [ [G G1 1kk( (j jω ω 0 0) ) ] ] ω k( * ( 产等 生幅 等振 幅迹 荡 振增 频 荡益 率 时的 ) 根
i1
nm
七、根轨迹与虚轴的交点
倾角:
θ
(
2
l1
)
π
nm
八、根轨迹的出射角和入射角 九、开环零极点与闭环极点特性
课后练习一
十、典型开环零极点分布对应的典型根轨迹 课后练习二
根轨迹的重合点
二重根的确定:满足特征方程和特征方程的导数方程。
Gk( s ) 1
Gk(
s
)
k*Q P (
( s)Q( s )
第一节 根轨迹的基本概念
一、根轨迹定义:特征方程中某待定参数从0-∞发生 变化时,特征根随之行走的轨迹。
二、简单系统根轨迹的绘制举例
(
1G k )(
s )k ( s 2
; )
(
2G k )(
s )k s (2 s)
三、根轨迹与系统性能之间的关系
1、稳定性——系统所有特征根在S平面的位置 2、稳态性能——系统型别、开环增益 3、动态性能——确定主导极点及其位置
i1
j1
jb
举例 G k (: s s) (3 K * s (2 ) s 2 2 ( s )2 s; )G k ( s (K ) 2 s * (2 s 2 5 s))
开环零极点与闭环极点特性
m
Kg (szi)
n
n
m
1Gk( s)1
i1 n
0 (ssj) (spj)Kg (szi)
(spj)
j1
j1
Байду номын сангаас
i1
j1
n
n
当n-m≥2时,闭环极点之和等于开环极点之和,即
sj pj
j1
j1
n
n
m
闭环极点之积和开环零、极点有如下关系: sj pj Kg zi
j1
j1
i1
举
例k(: s)sG(s 1 k*)(2s )1
K*6 ω2
求另一闭环极点
当n-m≥2时根轨迹分布规律:对称放射性分布。
二、根据开环零极点分布,绘制根轨迹草图。 1、复平面上两个极点、实轴上一个零点; 2、复平面上两个极点、实轴上两个零点; 3、复平面上两个极点和两个零点; 4、复平面上两个零点、实轴上两个极点。
三、 已知系统开环, 传绘 递制 函一 数般根定 轨特 迹殊 ,点 确的参
1
)Gk(
s)s2(
k s2
2)
2
)G k(
s)k
(s4 ) (3s;) s (s2 )
4 )G k( s)(k s 2( 2s4 s22 ) ;)
课后练习二
一、简答题: 1、根轨迹与虚轴交点坐标及参数的计算方法有几种?简述计算依据及步骤。 2、根轨迹与虚轴交点对应的K值在系统性能分析中的作用是什么? 3、两个极点、两个或一个零点在复平面上有根轨迹时,复平面上根轨迹的 形式如何?复平面上根轨迹的绘制规则又是什么? 4、“根据开环零极点分布绘制闭环系统的根轨迹,研究的是闭环系统的性 能。”这句话对否?
一、根轨迹的分支数——开环极点数、特征根个数。
二、根轨迹的连续性和对称性——连续,复平面上根轨迹对称于实轴。
三、根轨迹的起点和终点——起于开环极点,终于开环零点或无穷远。
四、根轨迹在实轴上的分布规律——奇偶分布特性。
五、根轨迹的渐近线——坐标:
n
m
pj zi
六、根轨迹的重合点(重根) δa j1
典型开环零极点分布对应的典型根轨迹
开环传递函数含有两个极点和一个或两个零点,则 若复平面上有根轨迹,根轨迹一定是圆或圆弧。
简单绘制方法:依据复平面上的对称性和圆的直径画圆;已知根轨 迹上的三点画圆。
应用举例
1
)G k(
s)k s
(s4;) (s2 )
3 )G k( s)(ks 2( s4 4;))
第二节 一般根轨迹的绘制依据
一、特征方程的一种演变形式——根轨迹方程
m
m
K* ( szi)
K * (s zi)
Gk( s) G( s ) H( s )ni1
( spj) j1
1Gk( s) 0
根轨迹方程:
i1 n
1
(s pj)
j1
k根轨迹增益、n极点个数、m零点个数、-pj极点坐标、-zi零点坐标。
二、根轨迹方程的幅值条件和相位条件 回顾—S平面矢量的表示形式
幅值条件:
m
s zi
i 1 n
1 K*
spj
j 1
相角条件:
m
n
( szi) ( spj)( 21 l ) π( l 0,1,2 )
i1
j1
第三节 一般根轨迹的绘制法则
负反馈系统根轨迹增益k*由0→+∞变化时的
根轨迹,称为一般根轨迹。
;
2
)Gk(
s)(
k s2
3)
;
3
)Gk(
s)s
k (s1 ) (2s4 s5
; )
4
)Gk(
s)k
(2s2 s2 s (s2 )
);
根轨迹的出射角和入射角
m
n
相 角 条 ( s z 件 i) : ( s p j) ( 2 1k)(π k 0 1 , 2 , )
i 1
j 1
m
n
出 射θ 角 pa(: 21 k )π (pazi) (papj)
i1
j1
ja
n
m
入 射z 角 b(: 21 kθ)π (zbpi) (zbzj)
利用ROUTH判据可以求解!
举例:
Gk(
s) s
k* (s1 ) (s2
1 )
课后练习一
一、简答题: 1、根轨迹方程与特征方程的区别是什么? 2、怎样检验复平面上的点是否在根轨迹上? 3、怎样确定根轨迹上确定点的K值? 4、根轨迹箭头所指的方向是K增加还是减小的方向?
二、根据开环零极点分布,绘制根轨迹草图。 1、两个极点、一个零点在实轴上的不同分布位置; 2、两个极点、两个零点在实轴上的不同分布位置; 3、三个极点、一个零点在实轴上的不同分布位置。
s
)
P
(sQ)
(
sP)(
s
) 0
K*( 重 合 点 时 , 根 益 轨 的 迹 取 增 值 )
s1,( 2 重 合 点 坐 标 )
分离角的确定:θd
三重根的确定
180 L
0
举例:
Gk (s)
k s(s
2)
1
Gk (s)
k(s 2) s(s 1)
1
根轨迹与虚轴的交点
令 : jsω带 入 特 征1方 Gk(程 jω 得 0): I Rm e [ [G G1 1kk( (j jω ω 0 0) ) ] ] ω k( * ( 产等 生幅 等振 幅迹 荡 振增 频 荡益 率 时的 ) 根
i1
nm
七、根轨迹与虚轴的交点
倾角:
θ
(
2
l1
)
π
nm
八、根轨迹的出射角和入射角 九、开环零极点与闭环极点特性
课后练习一
十、典型开环零极点分布对应的典型根轨迹 课后练习二
根轨迹的重合点
二重根的确定:满足特征方程和特征方程的导数方程。
Gk( s ) 1
Gk(
s
)
k*Q P (
( s)Q( s )