雷达--地物回波系统分

衰落速率的计算
计算多普勒频率是求衰减落速率(Fading rate )最容易的方法。为了在一个特定的多普勒频移范围内计算回波信号的幅度,必须将所有具有这些频移的信号相加。这就需要了解散射面上的多普勒频移等值线(等值多普勒频移)。对于每一种特殊形状的几何体都必须建立起这种多普勒频移等值线。下面用一个沿地球表面水平运动的简单例子来说明。它是普通巡航飞行飞机的一个典型实例。
假定飞机沿y 方向飞行,z 代表垂直方向,高度(固定)z = h 。于是有
v =1v v
h y x z y x 111R -+=
式中,1x ,1y ,1z 为单位矢量。因而 h y x vy R v r 222++==?R v
式中,v r 是相对速度。等相对速度曲线也就是等多普勒频移曲线。该曲线的方程为
0222222=+--h v v v y x r
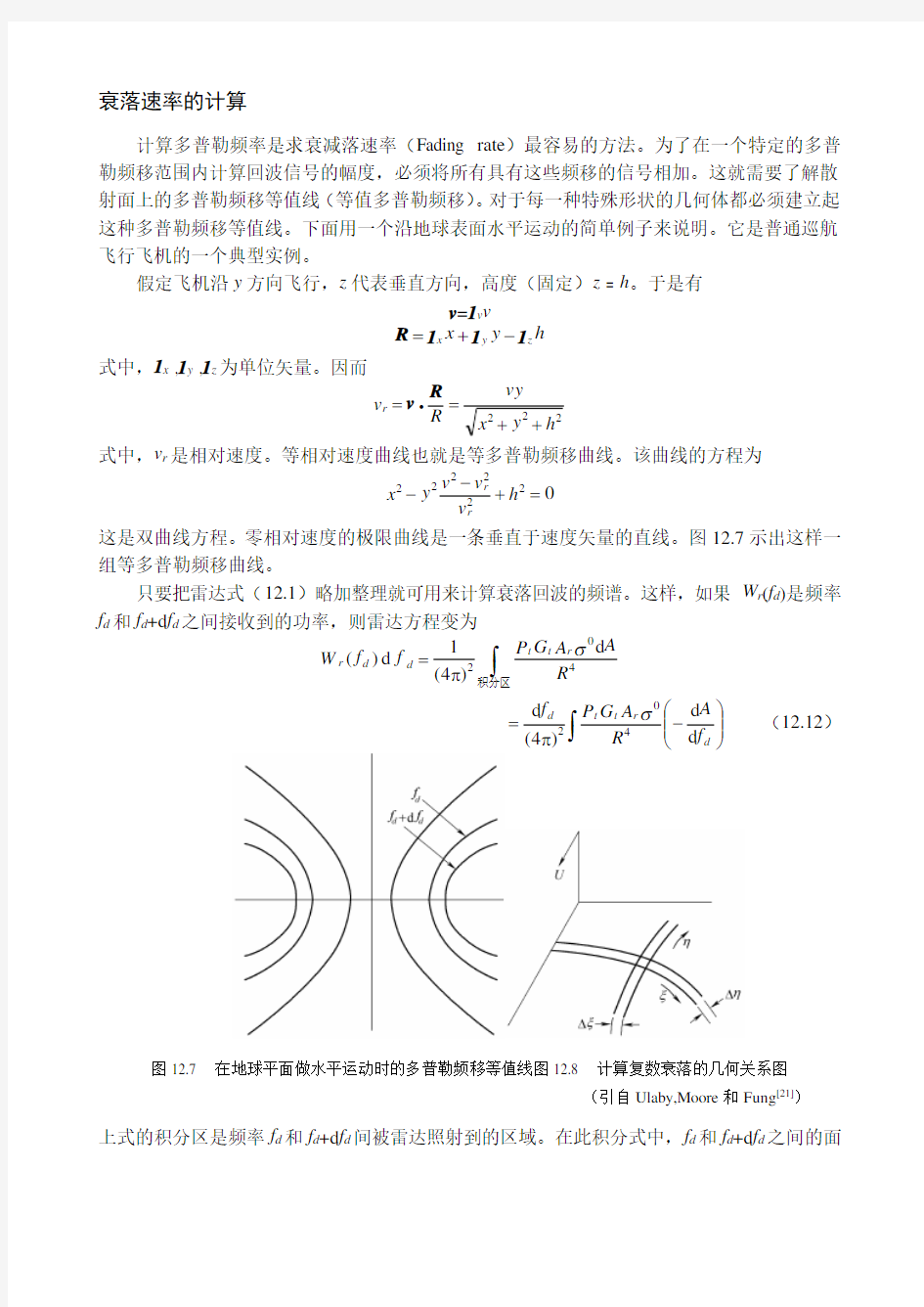
r 这是双曲线方程。零相对速度的极限曲线是一条垂直于速度矢量的直线。图12.7示出这样一组等多普勒频移曲线。
只要把雷达式(12.1)略加整理就可用来计算衰落回波的频谱。这样,如果W r (f d )是频率f d 和f d +d f d 之间接收到的功率,则雷达方程变为
?
π=积分区R A A G P f f W r t t d d r 402d )4(1d )(σ ????? ??-π=d r t t d
f A R A G P f d d )4(d 402σ (12.12)
图12.7 在地球平面做水平运动时的多普勒频移等值线图12.8 计算复数衰落的几何关系图
(引自Ulaby,Moore 和Fung [21]) 上式的积分区是频率f d 和f d +d f d 间被雷达照射到的区域。在此积分式中,f d 和f d +d f d 之间的面
积元用沿着等值多普勒频移曲线的坐标和垂直于等值多普勒频移曲线的坐标来表示。对每一种特定情况都必须建立这两个坐标。
图12.8示出水平传播的几何形状。其中,坐标ξ是等值多普勒频移曲线方向;η是垂直方向。若采用这种坐标,则式(12.12)可表示为
ξσληd )4(d d 40232?
????????????π=积分带R G P f f W t d d r (12.13) 式中,积分式中的发射功率P t 只有在照射到地面期间是非零的,其他时间为零。在脉冲雷达中,只有那些在特定时间内反射雷达回波的地面才被认为接收到有限的发射功率P t ,并且脉冲、天线和最大速度都限制了回波出现的频率范围。
图12.9示出另一个例子。它是一种窄波束窄脉冲雷达系统在很小的照射区域时的情况。在这种情况下线性近似不会有很大的误差。波束宽度为φ0的天线发射一个宽度为τ的脉冲。为了简化说明,在此假定将脉冲直接照射水平飞行飞机的前方。此外,假定一个矩形照射区R φ0×c τ/(sin θ)以使问题简化,并进一步忽略多普勒频移等值曲线的曲率。因此,可以认为所有最远点上和所有最近点上的多普勒频率都相同,即
θλm ax m ax sin 2v f d =θλ
m in m in sin 2v f d = 于是,多普勒频谱的总宽度为
)sin (sin 2m in m ax θθλ-=?v
f d
对于窄脉冲和偏离垂直入射的情况,总宽度则为
θθλ
cos 2?≈?v f d 若根据脉冲宽度计算,上式变为
θ
θλτsin cos 23h vc f d =? (12.14)
图12.9 机载搜索雷达多普勒频移计算的几何关系图
如果在矩形照射区域内入射角的变化足够小,以至使σ0基本保持恒定,则多普勒频谱为一个由f min 到f max 构成的矩形。
实际上,天线波束并不是矩形。这导致了侧视雷达的多普勒频谱和具有非矩形天线方向图(形状是沿径向分布的方向图)的多普勒频谱类似。因而,若径向方向天线的方向图是G =G (β),式中β是偏离波束中心的角度,则β根据多普勒频率f d 可表示为
v f d 2/λβ=
频谱为 ???
???π=v f G R r P f W d x
t d 2)4(2)(23303λσλ
式中,r x 是距离方向的水平分辨力。当然,它可用半功
率点波束宽度来近似,结果产生式(12.13)给出的波束
宽度。
检波的影响
在文献中人们已广泛地讨论过窄带噪声检波的影响。在这里仅需要说明上述例子中检波后的频谱和考虑每秒钟
内独立衰减样本的个数。图12.10分别示出检波前后的频
谱。如假定按平方律检波,则检波后的频谱是检波前频谱
的自卷积。图中仅示出通过检波器中低通滤波器部分。矩
形的射频频谱变成了三角形的视频频谱。
图12.10 来自均匀小区域频谱的衰落:(a )检波前;(b )检波后
这一频谱描述了连续波雷达检波器输出端上的衰落。
对于脉冲雷达而言,它以脉冲重复频率对频谱抽样。如果
脉冲重复频率高到足以使整个频谱再现(脉冲重复频率高
于奈奎斯特频率,2△f d ),那么图形就是在给定距离上所接
收到脉冲的抽样频谱。图12.11示出接收到的实际脉冲序
列,以及在距离R 1上对这些脉冲进行抽样所得到的序列。
图12.10示出在距离R 1上的抽样包络的频谱(经低通滤波)。
根据式(12.13)可知,在不同距离(或垂直角)上频谱的
衰落是不同的。
由于许多实用目的不同,独立的抽样个数是很重要的,
这可利用不相关抽样的基本统计学原理确定。对连续积累
图
12.11 地面目标在雷达顺序脉
冲中的衰落
而言,独立抽样的有效数为[55]
?
??????-=T sf e x x R T x T
P N 02d )(12 (12.15) 式中,P e 是包络平均功率;T 是平均积累时间;R sf (t )是检波电压的自协方差函数。在许多实际应用中,若N 足够大,上式可近似为
BT N ≈ (12.16)
式中,B 是有效的中频带宽。短积累时间的影响可参见参考资料56。
当然,由于载体的运动使波束照射到地面上不同区域,则衰落抽样也可能是独立的。因此,在特定的条件下,独立抽样率或由地面上照射区域的移动决定,或由多普勒效应决定,或者由两者的某种组合决定。
独立抽样的次数决定了运用瑞利分布或其他分布的方式。因此,如果100个脉冲只给出10个独立的抽样,则这些脉冲积累所得到平均值的方差将远大于100个脉冲都独立时求得的值。
基于多普勒效应的系统,如多普勒导航设备及SAR 系统,是依靠检波前的频谱进行工作的,因为它们是相参的,不能采用一般的检波方法。
动目标表面
有时杂波还具有内部运动。当利用固定雷达观察海面和地面的运动时会出现这种现象。在陆地上,虽然动物的移动以及机动车辆也会产生相同的效应,但它主要还是由植被的移动所引起的。若雷达回波是由图12.8所示的反射体集合产生的,则由于各散射体之间的运动,如同雷达的运动一样,雷达回波将发生波动。因此,如果每个反射体是一棵树,随风起伏的树木波动会使各散射体之间产生相对相移,其结果就是回波衰减。对于固定雷达而言,除去由折射引起的缓慢衰减外,这是惟一能观察到的衰减。而对于运动的雷达来说,目标的这种运动改变了雷达和目标之间的相对速度,因此,其频谱不同于固定表面的频谱。由雷达运动所造成的频谱宽度决定了雷达探测这种目标运动的能力。
12.5 地物回波测量技术
专用测试雷达和改装后的一般雷达可用来测量地物回波。由于地物回波的变化几乎都是由散射作用引起的,因此,常把这些系统称做散射仪。这种仪器既可以利用连续波信号(经多普勒处理或不经多普勒处理),也可用脉冲或调频测量技术。具备测量大范围频率响应的散射仪则被称为频谱仪[57]。它们可采用方向图从针状波束到扇形波束的各种天线。
连续波和调频连续波系统
最简单的散射仪采用固定式连续波雷达。虽然这种系统不很灵活,但这里仍要较为详细地予以讨论,从而阐明那些也适用于更复杂系统的校正方法。
图12.12是连续波散射仪的方框图。为估算σ0,需知雷达发射功率与接收功率之比。图12.12(a)所示的系统分别测量发射机功率和接收机灵敏度。发射机通过定向耦合器将能量馈送到天线,从而将其中一小部分能量馈送到功率计上。接收机具有单独的(与发射天线电气隔离)天线。接收机的输出经检波、平均,并显示在仪表、示波器或其他显示或记录装置上。接收机灵敏度的检查必须利用校准信号源。校准信号在发射机关机时送入接收机。图12.12(b)示出一个类似的装置,在此装置中将发射信号衰减为某一已知量,然后用来检查接收机。通过比较衰减过的发射信号和接收到的地物回波信号,人们便可测出散射截面积,而不需要知道实际的发射功率和接收机增益。
图12.12 连续波散射仪系统框图:(a)独立的发射机和接收机校准法;(b)利用接收和发射功率比的校准
方法
由于天线方向图和绝对增益是未知的,图12.12所示的校准方法尚不完善。而要精确测量增益是非常困难的,因而,绝对的校准可通过比较被测目标的接收信号(经适当的校正)和一个规范目标的接收信号获得。规范目标可以是金属球、龙伯(Luneburg)透镜反射器、金属板、角反射器或有源雷达校准器(ARCs,即转发器)[58]。在无源校准器中,龙伯透镜反射器是最佳的,这是由于它具有大的截面积(相对它的体积而言)和宽的方向图,从而使其校准不苛刻。龙伯透镜反射器常用来生成小舰船的强雷达目标,并且它们可从市面上的公司中获得。至于不同无源校准目标的相对指标可参阅Ulaby, Moore和Fung 等人的文献[59]。
理想接收机的输入与输出之间成线性响应关系,因此,在某一输入电平上校准一次,应对所有电平都有效。但是,由于检波器特性和放大器被强信号饱和等原因,一般接收机具有非线性特性。图12.13示出一条典型的接收机输入-输
出关系曲线。图中,输入信号中两个相等的增量(?i)
因曲线的非线性在输出端产生不同的增量。由于这个
原因,接收机必须在输入电平范围内进行校准,并在
数据处理过程中对非线性加以补偿。
连续波散射仪依据天线波束来识别不同入射角
度和不同目标。对它们通常做如下假定:天线方向图
在3dB点之内增益恒定,而在3dB点之外增益为零,
显然,这是不准确的。如果大目标出现在主瓣的两侧
图12.13 典型的接收机输入-输出曲
线(显示出非线性的影响)
或出现在副瓣中,则它们产生的信号对回波影响很大,以至使回波发生明显的变化。由于数据简化过程认为这个改变了的信号来自主瓣方向,所以得到的σ0值是错误的。由于垂直入射的回波信号一般都很强,垂直入射方向的响应常常会引起麻烦。故必须知道精确的天线方向图,并在数据分析时予以考虑。具有高副瓣的方向图显然是不能采用的。
散射系数可用下式确定:
?
π=照射区R A G P P t t r 40232d )4(σλ 式中,积分区是雷达的主要照射面积,副瓣照射区域亦包括在内。一般假定σ0在照射区域内为常数,因此,
?
π=照射区R A G P P t t r 42302d )4(σλ (12.17) 只有当天线将辐射能量限制在一个很小的角度和一个相当均匀的区域内,上述假定才是正确的。最后的表达式为
?
π=照射区R A G P P t t r 42230d )4(λσ (12.18) 注意:在这里只需要知道发射功率与接收功率之比,这也证明了图12.12(b )所示方法是正确的。有时假定R ,G t 或二者在照射区域内是常数,但是,只有检查了这种近似假定对具体问题的有效性后才能考虑将其用于式(12.18)。
如果把式(12.18)的方法用于系列测量,其结果表明,σ0在有效照射区域内很可能发生变化,则这一变化可用做确定函数f (θ)(描述σ0对θ变化的函数)的一阶近似式。于是σ0的近似式变为
?
π=照射区R A G f P P t t r 42230 d )()4(θλσ (12.19) 正确的散射截面积测量需要对天线增益G t 进行精确而又完整的测量。这可能要花费很多时间和费用,特别是当天线安装在飞机或其他金属物体上时。可是,若要正确测量散射截面积,完整的方向图是绝对必需的。
距离测量系统
雷达具有分辨不同距离上回波的能力以及定向天线波束,利用这些特性可方便地简化散射测量。尽管距离散射仪可用更特殊的调制,但绝大多数距离散射仪采用脉冲调制或频率调制。在本节中只讨论脉冲调制测距系统,由于其他测距系统都可简化等效为脉冲系统,所以这里讨论的结果具有普遍意义。
图12.14示出脉冲调制测距所用的方法。图12.14(a )所示为圆形笔状波束。在接近入射余角入射时,圆形天线方向图的照射区域变得相当长(照射区域为椭圆),因而利用脉冲宽度将照射限制在照射区域的一部分内是有益的。许多系统采用波束宽度来设定接近垂直方向区域的测量区,而采用距离分辨力来设定60?以外区域的测量区。
图12.14 用于散射仪的距离分辨力:(a )得到改进的一维圆形波束照射方向图;(b )扇形波束情况 图12.14(b )示出一种更好地利用测距性能的天线方向图。利用扇形波束,在地面上照射出一个狭窄的长条,同时,距离分辨力能够根据回波返回的时间分辨出由不同角度反射的回波。这种方法在远离垂直入射时特别有效,这是由于接近垂直入射时的分辨力比接近擦地(水平)入射时的分辨力差得多。这种简化方法假定波束截面上各处增益相等,其余各处为零,即
2/ 2/2 000f f f G a a t ><=或φ
2/2/000f f G G a t <<-=φ
式中,φ0为波束宽度;φa 为与天线轴线的夹角。
此外,还假定σ0保持不变,并且忽略分辨单元内的距离差,则σ0的表达式变为
r G P R P R
t r φλθσ002330sin )4(π= 式中,r R 是近距离分辨力。
Janza 的报告详细描述了脉冲测距雷达散射仪的校准问题[60][61]。
连续波-多普勒散射仪
连续波系统是同时测量多个角度上散射系数的一种便利方法。在连续波系统中,通过分离目标的多普勒频率可区分它们对应于不同角度的相对速度。利用这种系统的扇形波束可以同时测量机载雷达前方和后方地面的散射系数,如图12.15所示。图中也示出天线照射地面的方向图被两条等值多普勒频谱线所截的情形,以及它们的频谱宽度。谱线间的距离为
?ρ= R (sin θ2-sin θ1)
及
?f d = λ
v 2(sin θ2-sin θ1) 于是,地面上被照射单元宽度与多普勒频率带宽的关系为
?ρ=v
R 2λ(?f d ) 将此式代入雷达方程,并做如下假定:
(1)在照射区域内σ0为常数;
(2)在波束宽度内天线增益恒定,其余各处为零;
(3)在小照射区域内距离变化忽略不计。则有 ??
=π=R v f G P R A G P P d t t t r 2002
04402322d )4(ψσλσλ (12.21)
因而,
f G R v P P d t r ?=ψλσ020220
2 (12.22) 多普勒散射仪不需采用前向-后向波束。Seasat [62]和NSCA TT [63]空基多普勒散射仪设计的波束指向超前和滞后于与地面轨迹垂直的方向。
图12.15 扇形波束连续波-多普勒散射仪的分辨力
测量精度所要求的独立抽样
瑞利分布很确切地描述了信号衰减的规律。如果假定信号按瑞利分布衰落,则对于某一
给定精度所需的独立抽样数可从图12.16中查得。
该图所说的精度“范围”系指在分布图上5%与95%
两点之间的平均值范围。这一精度范围和任何与校
准及天线方向图相联系的精度问题无关。
测量精度取决于独立抽样的数目,而不取决于
抽样的总数。通过适当的分析,由式(12.15)和式
(12.16)可得到独立抽样的数目。该分析假设只有多普勒衰落影响独立性,但一个单元向另一个单元
的移动将增加独立抽样数。因而,总的抽样数约等
于式(12.13)算出的数乘上平均地面单元数。图12.17
示出几个关于入射角对独立抽样数影响(采用前向指向波束的水平移动散射仪)的实例。
从此类分析中得到的研究结果表明,在散射系数不随角度迅速变化的区域内,尽可能宽的角度(采用较宽的脉冲或较宽的滤波器得到连续波-多普勒系统)导致给定距离上地面的独立抽样数最大。
接近垂直入射的问题
在大多数声称包含垂直入射散射系数的已发表论文中的雷达回波数据中,所给出的散射系数太小。这是用有限的波束宽度或脉冲宽度测量垂直入射散射系数所带来的一个基本后果。随着入射角逐渐接近垂直方向,大部分目标的雷达回波都迅速下降。于是,测量的波束宽度 图12.16 衰落信号平均值的精度
或脉冲宽度一般都包含来自某些区域的回波信号,这些区域的截面积与σ0相差较大的分贝数。由于在接近垂直入射时散射系数的变化比入射角度超过10?或20?时的变化快得多,所以在垂直入射时问题更为严重。此外,由于垂直方向是入射角度的极限,也使问题复杂化。这是因为中心在垂直方向上的波束使位于其方向图两侧目标的σ0均减弱,而偏离垂直方向的波束使一侧目标的σ0增强,另一侧目标的σ0减弱。
图12.17 散射仪独立抽样数随入射角变化的实例
图12.18示出σ0随θ急剧下降的关系曲线。式(12.1)的雷达回波积分是卷积积分。图中示出波束方向图与σ0曲线的卷积。显然,垂直方向上的平均值低于它的实际值,这恰当地显示出接近垂直方向上的σ0的变化。
图12.19是一个实例[64],它是根据“立体波观察计划”(Stereo wave observation project)[65]报道的频谱推出的海面理论散射系数。从图中可以清楚地看出,不同波束宽度对散射系数的影响。
采用脉冲或其他测距系统进行测量所报道的地面散射截面积值总是有误差的。正如上面所指出的,这是由于在接近垂直方向上系统几乎不可能分辨窄的入射角度变化。
地表雷达检测技术方案
地表雷达检测技术 方案 贵州道兴建设工程检测有限责任公司 贵阳市轨道交通2号线兴筑西路站-水井坡站区间
地表雷达探测技术方案 方案编制: 技术审核: 方案批准: 贵州道兴建设工程建设工程检测有限责任公司 3月15日 目录 1 工程概况 ........................................................................... 错误!未定义书签。 2 探测项目和方法................................................................ 错误!未定义书签。 3 编制依据 ........................................................................... 错误!未定义书签。 4 雷达探测的基本原理........................................................ 错误!未定义书签。
5 探测流程 ........................................................................... 错误!未定义书签。 6 检测仪器和设备................................................................ 错误!未定义书签。 7 需有关单位配合的事项.................................................... 错误!未定义书签。 7 质量和安全保证措施........................................................ 错误!未定义书签。 8 预期成果 ........................................................................... 错误!未定义书签。 9 本工程项目安排................................................................ 错误!未定义书签。
雷达信号处理和数据处理
脉冲压缩雷达的仿真脉冲压缩雷达与匹配滤波的MATLAB仿真 姓名:-------- 学号:---------- 2014-10-28 西安电子科技大学
一、 雷达工作原理 雷达,是英文Radar 的音译,源于radio detection and ranging 的缩写,原意为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。利用电磁波探测目标的电子设备。发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。 雷达发射机的任务是产生符合要求的雷达波形(Radar Waveform ),然后经馈线和收发开关由发射天线辐射出去,遇到目标后,电磁波一部分反射,经接收天线和收发开关由接收机接收,对雷达回波信号做适当的处理就可以获知目标的相关信息。 但是因为普通脉冲在雷达作用距离与距离分辨率上存在自我矛盾,为了解决这个矛盾,我们采用脉冲压缩技术,即使用线性调频信号。 二、 线性调频(LFM )信号 脉冲压缩雷达能同时提高雷达的作用距离和距离分辨率。这种体制采用宽脉冲发射以提高发射的平均功率,保证足够大的作用距离;而接受时采用相应的脉冲压缩算法获得窄脉冲,以提高距离分辨率,较好的解决雷达作用距离与距离分辨率之间的矛盾。 脉冲压缩雷达最常见的调制信号是线性调频(Linear Frequency Modulation )信号,接收时采用匹配滤波器(Matched Filter )压缩脉冲。 LFM 信号的数学表达式: (2.1) 其中c f 为载波频率,()t rect T 为矩形信号: (2.2)
激光雷达回波信号仿真模拟
激光雷达回波信号仿真模拟研究 摘要 关键字 第一章绪论 第一节引言 激光雷达(Lidar:Li ght D etection A nd R anging),是一种用激光器作为辐射源的雷达,是激光技术与雷达技术完美结合的产物。激光雷达的最基本的工作原理与我们常见的普通雷达基本一致,即由发射系统发射一个信号,信号到达作用目标后会产生一个回波信号,我们将回波信号经过收集处理后,就可以获得所需要的信息。与普通雷达不同的是,激光雷达的发射信号是激光而普通雷达发射的信号是无线电波,两者在波长上相比,激光信号要短的多。由于激光的高频单色光的特性,激光雷达具有了许多普通雷达无法比拟的特点,比如分辨率高,测量、追踪精度高,抗电子干扰能力强,能够获得目标的多种图像,等等。因此,利用激光雷达对大气进行监测,收集、分析数据,建立一个大气环境预测理论模型,这将会成为研究气候变化和寻求解决对策的一项重要武器。 第二节本文的选题意义 由于投入巨大,在研制激光雷达实物之前,我们需要进行模拟与仿真研究,预测即将研制的激光雷达的各性能指标,评价总体方案的可行性。激光雷达回拨信号仿真模拟就是利用现代仿真技术,逼真的复现雷达回波信号的动态过程,它是现代计算机技术、数字模拟技术和激光雷达技术相结合的产物。仿真模拟的对象是激光雷达的探测没标以及它所处的环境,模拟的手段是利用计算机和相关设备以及相关程序,模拟的方式是复现包含着激光雷达目标和目标环境信息的雷达信号。通过激光雷达回波信号的仿真模拟,进而产生回波信号,我们可以在实际雷达系统前端不具备条件的情况下,对激光雷达系统的后级设备进行调试。 第三节本文的研究思路和结构安排 本文主要研究面向气象服务应用的大气激光雷达。笔者在熟悉激光雷达的基本工作原理的前提下,学习和熟悉各种参数对大气回波能量的影响,进而学习和掌握matlab编程语言,并且根据给定的激光雷达系统参数、大气参数和光学参数,以激光雷达方程为基础,通过仿真模拟得到理想状态下的大气回波信号。但是,在实际测量工作中,由于大气中的各种干扰,我们获得的回波信号并不和理想状态下的大气回波信号一致,因此,在本文的后期工作中,笔者根据已有的大量激光雷达实测信号与模拟信号对比,既能验证仿真模拟结果的准确性,又能应用于激光雷达的性能指标等方面的分析上,具有比较高的实际应用价值。 第二章激光雷达的原理 第一节激光雷达系统 一个标准的激光雷达系统应该包含以下部件:激光器、发射系统、接收系统、光学系统、信号处理系统以及显示系统。它的工作原理图我们可以用下图表示:
雷达回波信号产生
雷达回波信号产生 1.线性调频信号: 线性调频信号是指频率随时间而线性改变(增加或减少)的信号,是通过非线性相位调制或线性频率调制获得大时宽带宽积的典型例子。通常把线性调频信号称为Chirp信号,它是研究最早而且应用最广泛的一种脉冲压缩信号。 线性调频信号的主要优点是所用的匹配滤波器对回波的多普勒频移不敏感,即使回波信号有较大的多普勒频移,仍能用同一个匹配滤波器完成脉冲压缩; 主要缺点是存在距离和多普勒频移的耦合。此外,线性调频信号的匹配滤波器的输出旁瓣电平较高。 单个线性调频脉冲信号的时域表达式为: 其中A为脉冲幅度,f0为中心频率,μ为调频斜率。 Matlab实现: 参数设置 :
信号产生:u=cos(2*pi*(f0*t+K*t.^2/2)); 仿真结果: 2.多普勒频移 “多普勒效应”是由奥地利物理学家Chrjstian?Doppler 首先发现并加以研究而得名的,其内容为:由于波源和接收者之间存在着相互运动而造成接收者接收到的频率与波源发出的频率之间发生变化。 多普勒频移(Doppler Shift)是多普勒效应在无线电领域的一种体现。其定义为:由于发射机和接收机间的相对运动,接收机接收到的信号频率将与发射机发出的信号频率之间产生一个差值,该差值就是Doppler Shift。 设发射机发出的信号频率为(f 发),接收机接收到的信号频率为(f 收),发射机与接收机之间的相对运动速度为V,C 为电磁波在自由空间的传播速度:3×10(8次方)米/秒则有如下公式:f 收=(c±v)/λ=f 发±v/λ=f 发±f 移;(f 移)即为多普勒频移,(f 移)的大小取决于信号波长λ及相对运动速度V。对某发射机,
雷达介绍资料汇总
概述 介绍 Rockwell Collions WXR-2100型多扫描气象雷达在气象信息的处理和提炼方法上有革命性的突破,多扫描气象雷达是一种全自动雷达,它可以在不需要飞行员输入扫描角度和进行增益设置的情况下,不管在什么时候,不管飞机的姿态如何,对所有范围内重要的气象信息进行无杂波的显示。当多扫描气象雷达工作在自动模式的时候,每个飞行员将会获得一般只有有经验的雷达操作员才能获得的气象信息,而飞行员只需进行简单的规范化航空公司飞行员培训。多扫描气象雷达有效的减少了飞行员的工作负担,并增强了天气的探测能力,增加了机组及旅客的安全性。 多扫描雷达工作的关键在于雷达对雷雨底部反射部分的探测,然后通过先进的数字信号处理技术对地面杂波进行抑制。为了对短、中、长距离范围内的气象进行更好的探测,多扫描气象雷达也集成了多雷达扫描功能,对扫描角度进行预设。因此,在不同的飞行阶段,不同的探测距离,它的气象探测结果都十分出色。真320海里探测和Qverflight Protection功能是多扫描气象雷达众多新特征中的两个。多扫描气象雷达因为使用先进的运算法则来消除地面杂波,这使它能够跨越雷达视野的限制,为飞行员提供真正意义上的320海里气象资料。Overflight Protection功能使机组人员能够躲开雷雨顶部渗透,这是如今导致飞机颠簸的主要原因之一。Overflight Protection功能将那些对飞机造成威胁的任何雷雨信息保持在雷达显示屏上,直到它不在对飞机造成威胁为止。 系统描述 重要的运行特点 全自动工作:多扫描气象雷达设计工作在全自动模式,飞行员只需输入探测范围,而不需要输入扫描角度和进行增益设置。 理想的无杂波显示:Rockwell Collions第三代地面杂波抑制算法能减少约98%的地面杂波,这使它能理想的无杂波显示有威胁的气象信息。 在不同探测范围和飞行高度情况下良好的气象探测能力:多扫描气象雷达将从不同扫描角度获得的气象数据储存在存储器中,当飞行员选择了所要求的显示范围,不同角度的扫描信息将会从存储器中取出并一起显示。通过多角度的扫描,可以获得近距离和远距离的气象信息,这使得不管飞机的姿态如何,不管何种探测范围,显示屏上所呈现的都是一幅最优化的气象图。 决策气象:多扫描气象雷达能够提供真正意义上的320海里决策气象信息。 Gain Plus:Gain Plus包括以下功能: 传统的加减增益控制:多扫描气象雷达允许机组人员在人工或自动工作模式的时候进行增加或减小增益。 基于温度的增益控制:在高海拔的巡航高度,由于低的雷雨雷达反射率,将会基于温度对雷雨增益进行补偿。 路径衰减补偿和警报(PAC Alert):对距飞机80海里范围内的干扰性气象造成的衰减进行补偿,当补偿超过限制,一个黄色的PAC Alert杆将显示以提醒飞行员注意雷达阴影区。Overflight Protection:Overflight Protection功能减少了在高海拔巡航高度时疏漏雷雨顶部渗漏的可能性。多扫描气象雷达向下扫描波束的信息和它的信息存储能力将发挥作用,可以防止在飞机完全穿越有威胁的雷雨区之前,雷雨区图象在显示屏上消失。 海洋气候反射率补偿:多扫描气象雷达能对海洋雷雨反射率的减小进行增益补偿,以便在
车流量检测雷达
佰誉达 车流量检测雷达 (本产品已通过国家道路交通安全产品质量监督检验中心公安部交通安全产品质量监督检测中心认证) 用户手册 佰誉达科技 深圳
目录 一、微波车流量检测雷达概述 (1) 1.1用途 (1) 1.2描述 (1) 1.3技术指标 (2) 1.3.1微波指标 (2) 1.3.2检测指标 (2) 1.3.3通信指标 (2) 1.3.4环境与可靠性指标 (2) 1.3.5电源指标 (2) 1.3.6物理指标 (3) 1.4应用领域 (3) 1.4.1路口模式(城市交通) (3) 1.4.2高速公路(城市交通、高速公路) (3) 1.5典型应用 (3) 1.5.1路口模式(城市交通) (3) 1.5.2路段模式(城市交通、高速公路) (4) 二、微波车流量检测雷达的安装 (6) 2.1设备组成 (6) 2.2设备安装 (6) 2.3工程安装 (7) 2.4雷达接口 (7) 三、微波车流量检测雷达的调试及使用 (7) 3.1软件运行环境 (7) 3.2软件安装 (8) 3.3软件使用说明 (8) 3.3.1主界面 (8) 3.3.2 设备参数 (8) 3.3.3雷达参数 (9) 3.3.4 安装参数 (9) 3.3.5 连接雷达 (10) 3.3.6按钮功能说明 (10) 3.3.7 车道计数 (11) 3.3.8 车道流量统计直方图 (11) 四、微波车流量检测雷达数据传输 (11) 4.1雷达数据传输模式 (11) 五、微波车流量检测雷达故障排除 (12) 附录1 (12)
一、微波车流量检测雷达概述 1.1用途 车流量检测雷达是拥有完全自主知识产权的新型微波车辆检测器,利用雷达线性调频技术原理,对路面发射微波,通过对回波信号进行高速实时的数字化处理分析,检测车流量、速度、车道占有率和车型等交通流基本信息的非接触式交通检测器。检测器主要应用于高速公路、城市快速路、普通公路交通流量调查站和桥梁的交通参数采集,为交通管理提供准确、可靠、实时的交通情报,为实现交通智能化提供技术支持。 1.2描述 车流量检测雷达是一种工作在微波频段的雷达探测器。雷达向路面连续发射线性调频微波波束,车辆通过微波波束时反射信号,根据反射信号检测目标是否存在并计算其交通参数。每隔一定时间(1s-1000s)将各种交通流参数信息通过数据通道传输到指挥控制中心。它能可靠的检测与区分公路上的任何车辆,包括从摩托车到多轴、高车身的车辆以及拖车等,检测路上每一车道所通过的车流量、车辆速度、车道占有率、车型分类等参数。 检测器雷达采用的是中心频率为24GHz的微波信号,因此具有高频微波的所有特性,自主开发的雷达信号分析处理算法检测精度高,检测范围宽,可以跨越道路中央隔离带的防眩板、树丛及金属护栏等障碍物检测到驶过的车辆,大大降低了隔离带对检测精度的影响。同时,由于微波对环境干扰不敏感,使得其在各种天气气候条件下都保持准确的检测。 检测器采用了创新的软件设计理念,将车道的静态划分和动态划分结合起来,在使用前静态划分车道,并在使用中根据车流的实际情况调整车道的划分,对跨车道行驶的车辆可通过模糊判断,合理的将该车划分到最近的一个车道,而不会检测为两辆车,解决了城市复杂交通情况下的应用问题。 综合来说主要有以下特点: 1)自主研发,可根据需求更改数据输出接口和协议,且支持远程软件控制; 2)安装方便,维护简单。 3)高适应性,在恶劣气候条下稳定工作,不受风、雨、雾、冰雹等影响。 4)自动车道识别功能,实现0后置距离的安装。
Matlab雷达回波数据模拟
clear, hold off format compact J = sqrt(-1); close all% Get root file name for saving resultsfile=input('Enter root file name for data and listing files: ','s'); % form radar chirp pulseT = 10e-6; % pulse length, seconds W = 10e6; % chirp bandwidth, Hz fs = 12e6; % chirp sampling rate, Hz; oversample by a littlefprintf('\nPulse length = %g microseconds\n',T/1e-6) fprintf('Chirp bandwidth = %g Mhz\n',W/1e6) fprintf('Sampling rate = %g Msamples/sec\n',fs/1e6) s = git_chirp(T,W,fs/W); % 120-by-1 array plot((1e6/fs)*(0:length(s)-1),[real(s) imag(s)]) title('Real and Imaginary Parts of Chirp Pulse') xlabel('time (usec)') ylabel('amplitude') gridNp = 20; % 20 pulses jkl = 0:(Np-1); % pulse index array, 慢时间采样的序列,注意第一个PRI标记为0是为了慢时间起始时刻从零开始 PRF = 10.0e3; % PRF in Hz PRI = (1/PRF); % PRI in sec
雷达--地物回波系统分
衰落速率的计算 计算多普勒频率是求衰减落速率(Fading rate )最容易的方法。为了在一个特定的多普勒频移范围内计算回波信号的幅度,必须将所有具有这些频移的信号相加。这就需要了解散射面上的多普勒频移等值线(等值多普勒频移)。对于每一种特殊形状的几何体都必须建立起这种多普勒频移等值线。下面用一个沿地球表面水平运动的简单例子来说明。它是普通巡航飞行飞机的一个典型实例。 假定飞机沿y 方向飞行,z 代表垂直方向,高度(固定)z = h 。于是有 v =1v v h y x z y x 111R -+= 式中,1x ,1y ,1z 为单位矢量。因而 h y x vy R v r 222++==?R v 式中,v r 是相对速度。等相对速度曲线也就是等多普勒频移曲线。该曲线的方程为 0222222=+--h v v v y x r r 这是双曲线方程。零相对速度的极限曲线是一条垂直于速度矢量的直线。图12.7示出这样一组等多普勒频移曲线。 只要把雷达式(12.1)略加整理就可用来计算衰落回波的频谱。这样,如果W r (f d )是频率f d 和f d +d f d 之间接收到的功率,则雷达方程变为 ? π=积分区R A A G P f f W r t t d d r 402d )4(1d )(σ ????? ??-π=d r t t d f A R A G P f d d )4(d 402σ (12.12) 图12.7 在地球平面做水平运动时的多普勒频移等值线图12.8 计算复数衰落的几何关系图 (引自Ulaby,Moore 和Fung [21]) 上式的积分区是频率f d 和f d +d f d 间被雷达照射到的区域。在此积分式中,f d 和f d +d f d 之间的面
利用雷达回波资料作临近预报应注意的几个问题
文章编号:167328411(2008)增刊 20062202 利用雷达回波资料作临近预报应注意的几个问题 钟常鸣 (广西北海市气象局,北海 536000) 摘 要:利用雷达回波资料作临近预报应该注意以下几个问题:新一代雷达存在静锥区,静锥区内没有雷达探测数据,要通过调用邻近雷达站的低仰角资料来弥补;正确理解平面位置显示(PP I)是准确地进行回波分析的基础;地球曲率会影响天气雷达的探测,雷达波束在前进方向上随着距离增加距地面高度逐渐增加;地物杂波对雷达低仰角的产品会造成影响;使用线性外推作临近预报只有在一定的短时间内才可获得最好的效果。 关键词:雷达回波;临近预报;问题 1 利用雷达回波资料作临近预报要注意的问题 111 分析雷达资料前注意的问题 分析雷达资料前要查看图象文字区的各种参数,如站名、图象产品名称、时间、显示色标与单位、仰角或方位角、脉冲重复频率、显示距离等,还要检查回波强度(或速度)和范围分布的可靠性,如回波强度值、有否虚假回波、最大不模糊速度与脉冲重复频率是否一致、同时次的径向速度(V)图象与回波强度(Z)图象的范围等。 112 雷达静锥区问题 我国的新一代天气雷达(C I N RAD2SA)以体扫模式进行工作,雷达操作员不能手动调节天线仰角,天线仰角只能通过改变雷达的扫描方式、体扫模式及工作模式而设定。新一代天气雷达C I N RAD2SA 的最高扫描仰角为1915°,仰角超过1915°的任何位置上都没有雷达探测数据,1915°仰角以上的区域称为静锥区。要解决雷达静锥区资料空白的问题,必须通过调用邻近雷达站的低仰角资料来弥补。 113 正确理解平面位置显示(PP I) 所谓平面位置显示产品PP I,是指当雷达以固定仰角,天线以全方位扫描的探测方式而获取的数据,通过以雷达为中心的极坐标形式,采用不同的彩色色标来表示数据的大小和方向而产生的图象产品。平面位置显示PP I包括回波强度、径向风场、速度谱宽三种,此类产品一般还可配上当地的地形、河流、行政区划等地理信息,方便用户使用。PP I产品图象中标明时间、仰角、色标等,径向速度PP I图象产品中还应表明雷达测站所在的位置。 正确理解平面位置显示(PP I)是准确地进行回波分析的基础,严格来说PP I显示的面并不是平面而是一个圆锥面,在每个仰角上,以雷达为中心,沿着雷达波束向外,距地面的高度随径向距离的增加而增加。 114 地球曲率对天气雷达探测的影响 由于大气中的温、压、湿随高度而变化,同时地球本身是一个近似的球体,就是当雷达天线处于0°仰角发射电磁波时,电磁波在前进过程中距地面的高度也在改变。在标准大气折射的情况下,由于地球曲率的原因,雷达波束在前进方向上随着径向距离增加逐渐远离地球,云雨只有进入雷达波束内才能被雷达观测到1距雷达较近的地方雷达波束高度较低,近处的云雨高度由于容易达到雷达波束的高度因而被雷达观测到,而距雷达较远的地方雷达波束高度较高,远处的云雨如达不到雷达波束高度进入不了雷达波束内就不能被雷达观测到。 也就是说,平面位置显示产品PP I上远处的地方即使没有回波显示,也不能判断那里实际上有没有云雨存在,有可能该处的云雨高度够不着雷达波束没有被雷达观测到。要判断远处是否存在云雨应调用邻近雷达站的低仰角资料来进行分析。 115 地物杂波的影响 地物杂波包括普通地物杂波和异常地物杂波。 普通地物杂波是指由高大建筑、山脉、丘陵、海岸线、岛屿等地形地物在雷达波束正常传播情况下造成的杂波,一般发生在距雷达较近的地方;而由特殊气象条件下雷达波束的超折射造成的地物回波 第29卷 增刊 气 象 研 究 与 应 用 V o l129 增刊 2008年10月JOU RNAL O F M ET EOROLO G I CAL R ESEA RCH AND A PPL I CA T I ON O ct12008
地表雷达检测技术方案
贵州道兴建设工程检测有限责任公司 贵阳市轨道交通2号线兴筑西路站-水井坡站区间地表雷达探测技术方案 方案编制: 技术审核: 方案批准: 贵州道兴建设工程建设工程检测有限责任公司 2016年3月15日 目录
1 工程概况 (1) 2 探测项目和方法 (1) 3 编制依据 (1) 4 雷达探测的基本原理 (2) 5 探测流程 (3) 6 检测仪器和设备 (3) 7 需有关单位配合的事项 (3) 7 质量和安全保证措施 (4) 8 预期成果 (4) 9 本工程项目安排 (4)
1 工程概况 贵阳市轨道交通2号线兴筑西路站-水井坡站区间长1234.974m,其中水井坡站(长189.6m),为本一站一区间的土建工程施工。 水井坡站是贵阳市轨道交通2号线的一个中间站,位于主干道金阳南路的下方,周围交通较为繁忙。车站起止里程YDK19+978.193~YDK20+167.819,总长189.6m,为地下两层岛式车站,车站结构为明挖地下两层单柱双跨矩形结构。标准段宽19.9m,基坑深约15-21m,主体建筑面积7941.8m2,总建筑面积11936m2。顶板覆土约3.6m,轨面埋深15.35m。本站共设4个出入口、2组风亭。1、4号出入口过街段采用暗挖外其余均为明挖法施工。车站两端均为矿山法区间。 兴筑西路站-水井坡站区间,本区间线路出兴筑西路站后,穿过诚信南路东侧的一个小山包及金阳客站公交停车场(侧穿加气站),再穿过翠柳路后,进入喀斯特公园内,在公园内线路继续往东南,穿出公园东南角、石村东路后,到达金阳南路水井坡站,区间设计里程为:YDK18+741.914~YDK19+976.888,区间隧道全长1234.974m。采用矿山法施工。隧道拱顶埋深14.5~39.6m,线间距为12m~17m。 本工程项目为城市交通通道,工程地质条件复杂,为了保证施工安全,必须须对开挖段落的工程地质地质条件弄清楚,防止工安全施工大发生,故根据贵阳市城市轨道交通有限公司文件“筑轨道〔2015〕96号”“贵阳市城市轨道交通有限公司关于印发《贵阳市城市轨道交通工程地表地质雷达探测管理办法(试行)》的通知”的要求,根据本段的具体情况,对该标段的开挖站台和暗挖区间隧道地表进行了雷达探测,雷达测线布置严格按办法进行。其具体探测方案如下: 2 探测项目和方法 根据本工程的实际和相关规范要求,采用技术成熟地质雷达法,对施工站台的周围,以及暗挖区间的地表的空洞、脱空、水囊、疏松堆积体等进行探测,防止施工过程中的坍塌、涌泥、涌水等事故发生。 3 编制依据 《铁路隧道超前地质预报技术指南》(铁建设【2008】105); 《铁路隧道工程施工技术指南》(TZ 204-2008); 《铁路隧道设计施工有关标准补充规定》(铁建设【2007】88);
雷达原理及测试方案
雷达原理及测试方案 1 雷达组成和测量原理 雷达(Radar)是Radio Detection and Ranging的缩写,原意“无线电探测和测距”,即用无线电方法发现目标并测定它们在空间的位置。现代雷达的任务不仅是测量目标的距离、方位和仰角,而且还包括测量目标速度,以及从目标回波中获取更多有关目标的信息。 1.1 雷达组成 图1 雷达简单组成框图 图2 雷达主要组成框图 雷达主要由天线、发射机、接收机、信号处理和显示设备组成,基本组成框图如图1所示。通常雷达工作频率范围为2MHz~35GHz,其中超视距雷达工作频率为2~30MHz,工作频率为100~1000MHz范围一般为远程警戒雷达,工作频率为1~4GHz范围一般为中程雷达,工作频率在4GHz以上一般为近程雷达。 老式雷达发射波形简单,通常为脉冲宽度为τ、重复频率为Tτ的高频脉冲串。天线采
用机械天线,接收信号处理非常简单。这种雷达存在的问题是抗干扰能力非常差,无法在复杂环境下使用。 由于航空、航天技术的飞速发展,飞机、导弹、人造卫星及宇宙飞船等采用雷达作为探测和控制手段,对雷达提出了高精度、远距离、高分辨力及多目标测量要求,新一代雷达对雷达原有技术作了相当大的改进,其中频率捷变和线性相位信号、采用编码扩频的低截获概率雷达技术、动态目标显示和脉冲多普勒技术是非常重要的新技术。 1.2 雷达测量原理 1) 目标斜距的测量 图3 雷达接收时域波形 在雷达系统测试中需要测试雷达到目标的距离和目标速度,雷达到目标的距离是由电磁波从发射到接收所需的时间来确定,雷达接收波形参见图3,雷达到达目标的距离R为:R=0.5×c×t r式(2)式中c=3×108m/s,t r为来回传播时间 2) 目标角位置的测量 目标角指方位角或仰角,这两个角位置基本上是利用天线的方向性来实现。雷达天线将电磁能汇集在窄波束内,当天线对准目标时,回波信号最强。
SAR雷达目标信号模拟器案例
SAR雷达目标信号模拟器案例 来源:北京华力创通科技股份有限公司作者:发表时间:2010-04-08 16:08:50 目前机载 SAR 雷达设备的主要测试手段是在地面采用点目标信号进行部分指标和分辨率测试。进 一步完整的成像测试需要安装在运载飞机上进行实际飞行测试,得到最后的指标。 星载 SAR 雷达设备的主要测试手段同样是在地面点目标信号进行部分指标和分辨率测试。通过 这种测试来估计实际的成像指标。 XXX 型 SAR 雷达目标信号模拟器可以实时模拟回放多点目标和场景目标回波。用于机载或星载 SAR 雷达设备在地面进行完整的功能和性能指标调试和测试。 XXX 型 SAR 雷达目标回波信号模拟器基本原理是一种数字储频体制的测试信号模拟设备。接收 来自雷达系统 TR 组件送出的脉冲发射信号,并在此基础上生成触发脉冲和回波信号;实时模拟点目 标回波信号:--能进行时间延迟、能叠加多普勒频移,能进行幅度调制;非实时模拟面目标回波信 号--可叠加地表信息、轨道特性、平台姿态特性和幅相误差、波位特性、天线性能等工程误差 XXX 型 SAR 雷达目标回波信号模拟器主要由三个功能单元组成: 射频单元 将来自雷达系统脉冲发射信号转换到中频,并将中频单元的模拟回波信号混频至射频,通过射频 电缆注入或通过天线回放给被测雷达; 数字中频单元 基于数字储频体制获取中频信号,经过数字变换成多点目标回波中频信号回放给射频单元。或根 据被测雷达的信号特征,将已经存储的大型场景目标回波回放出去 数学仿真单元 运行 SAR 雷达场景目标模拟生成算法,生成场景(即面目标)回波数据,注入给数字中频单元 技术优势 幅相控制技术 高速 AD/DA 技术( 20M - 1.5G 采样率) 实时点目标运算,非实时面目标模拟 高速板间数据传输技术(单通道最高速率可达 6Gbps ) 大容量板级数据存储技术( 20G ) 应用方案 雷达系统回波模拟 精密延迟信号实现 用于宽带雷达模拟器 实时记录 SAR 发射信号 实时回放数字信号、模拟各种条件
第八章雷达回波分析
第八章雷达产品实际应用个例分析 8.1 1992年4月28日Oklahoma州中西部个例 在下午和晚上,在Oklahoma的中部和北部出现了强风暴。刚过17时30分(局地时间),在Dewey 县的最北端(Oklahoma市西北150km),一个风暴发展成为强风暴。在风暴内部30000英尺的高度,最大的反射率因子超过50dBZ。同时,在其入流区之上,存在一个较强的中层悬垂回波,说明有较大的冰雹存在。基于这些雷达特征,于17时45分发布了Dewey 县将出现一次强雷暴过程的警报。该警报于28分钟后得到证实,出现了2cm 直径的冰雹。在接下来的2小时内,基于由WSR-88D观测的三维风暴结构,又发布了Dewey 县下游的风暴警报。 摘自文献1 图11 图8-1 位于Comanche县中部的一个非龙卷的旋转风暴相对速度的4幅图显示。时间为1992年4月28日20点19分。强风暴的警报没有升级为龙卷警报,基于低层的弱旋转特征。在风暴的中层,较强的旋转很明显。 当风暴继续向着东南方向的Lawton地区(Comanche县境内),WSR-88D探测到位于风暴中层的弱的旋转。19点55分,又发布强风暴警报。一个飞行员于大约20点10分在Lawton 地区的北部观测到漏斗云。然而,风暴中层相对速度数据(图8-1)继续表明一个宽阔的旋转特征只局限于风暴的中层。因此,预报员决定不把强风暴警报升级为龙卷警报,主要基于WSR-88D的三维速度和反射率因子数据。20点20分,高尔夫球大小的冰雹降落在Lawton 地区,证实了强风暴的警报,其提前时间(lead time)为25分钟。 从以上可知,WSR-88D不仅在发布警告方面有较好的准确率,而且在决定不发布警报或不升级警报方面也有相当的技巧。预报员经常面对是否应发布或升级一个强天气警报。位
探地雷达检测细则
一、应用范围 适用于基岩埋深探测、地下金属及非金属埋设物(如管道、电缆及其设施等)探测、道路铺设质量检测、地下水位探测、建筑物墙、柱、板内钢筋探测、其它类似工作操作细则 二、检测标准 T B 10223-2004铁路隧道衬砌质量无损检测规程 JTG F80/1-2004公路工程质量检验评定标准 JTG 042-94公路隧道施工技术规范 G B 50204-2002混凝土结构工程施工质量验收规范 三、检测设备 ZON D-12E G P R探地雷达主机及天线 四、检测操作细则 1.收集相关工程的资料 2.检测方法技术应符合下列要求: 2.1测线布置 2.1.1隧道施工过程中质量检测以纵向布线为主,横向布线为辅。纵向布线的位置应在隧道拱顶;左右拱腰、左右边墙和隧道底部各布一条;横向布线可按检测内容和要求布设线距,一般情况线距8~12m;采用点测时每断面不小于6个点。检测中发现不合格地段应加密测线和测点。 2.1.2隧道竣工验收时质量检测应纵向布线,必要时可横向布线。纵向布线的位置应在隧道拱顶、左右拱腰和左右边墙各布一条;横向布线线距8~12m,采用点测时每断面不少于5个点。需确定回填空洞规模和范围时,应加密测线和测点。 2.1.3三车道隧道应在隧道拱部增加两条测线。 2.1.4测线每5~10m应有一里程标记。 2.2介质参数标定 2.2.1检测前应对衬砌混凝土的介电常数或电磁波速做现场标定,且每座隧道应不少于一处,每处实测不少于3次,取平均值为该隧道的介电常数或电磁波速。当隧道长度大于3km、衬砌材料或含水量变化较大时,应适当增加标定点数。 2.2.2标定方法:○1在已知厚度部位或材料与隧道相同的其他预制件上测量;○2在洞口或洞内避车洞处使用双天线直达波法测量;○3钻孔实测。
远程雷达监控系统
远程控制(站点电力控制和监视、雷达工况控制和监视、现场视频监视、设备状态控制及监视);数据采集位数10Bits;采集速率40M;任意监视区域设置(监视区域数>5个);同时跟踪和监视目标数>500批;能够保存图像和目标跟踪数据,并能够回放在线历史态势;具备雷达组网和数据综合能力,能够覆盖大面积海域;多部雷达目标数据能够同时显示在电子海图平台,便于进一步构建大范围实时态势辅助决策系统。 特色产品—雷达成像专用采集卡 产品背景:在电子海图叠加的信息中要有雷达一次视频(雷达图像)和雷达二次视频(目标信息,通常采取0138格式)。雷达二次视频的叠加相对容易解决,通过串行口解码后,即可直接叠加;而解决雷达一次视频的叠加问题则相对较难。 产品功能: 1.雷达数据采集; 2.实时雷达成像,具备外部可控的偏心显示功能、缩放功能、成像模式功能、色系切换功能; 3.提供与ECDIS相连的透明控制功能; 4.实现其他基本的雷达信号处理功能; 采集卡型号:根据其插口形式的不同可分为:PCI接口板、PCLE接口板;PCL104+接口板、网络型和USB型
特色产品—油田监控 具备光电联动功能的安防监控系统 由于系统具有全天候、广范围、定点精确等特点,本系统也广泛用于安防领域,目前大庆、胜利油田已安装全套设备,构建一套具有雷达监控,视频联动高精度监控功能的强大 安防平台。
特色产品—水产养殖 系统对养殖区内所有来往船只及作业船舶进行昼夜监视,提供监视船舶位置、速度及航迹数据;具有激光夜视全向数字云台和海域视频监视子系统,能够接收雷达目标指示,实现同步提供目标的图像信息;能够对锚泊和航行船舶安全提供预警信息;同时提供船舶的安全等数据。设备的使用改变了水产养殖传统的管理方式和手段,对水产养殖的自动化、网络 化等方面将起到积极的推动作用。
天气雷达回波模拟系统的设计与实现
天气雷达回波模拟系统的设计与实现 摘要:天气雷达回波模拟系统能够成功模拟出具有真实天气目标特征的回波信号,利用这种回波信号可以实现在实验室环境中完成本需在外场试验条件下才可以进行的雷达性能测试。首先介绍了天气雷达回波模拟的原理,设计出回波模拟流程图,其次给出了回波模拟硬件平台的设计及模拟软件实现的思路,最后根据真实天气回波的特征等信息生成模拟回波图,并对模拟前后的回波图进行对比分析。 关键词:天气雷达;回波;信号模拟 0 引言 在现代地基主动气象遥感领域,多普勒天气雷达占据着重要的地位,特别是在对一些突发性、灾害性等中小尺度天气过程的捕获与跟踪时,其较高的时间与空间分辨能力就显得越来越重要[1]。随着多普勒天气雷达在气象探测业务运行中的广泛使用,在雷达的研发与维护过程中,对雷达的性能进行完整测试就显得非常重要[2]。由于实验条件及天气状况等因素的影响,要在完全真实的天气过程的环境中对雷达各个模块及系统进行测试将非常困难。国内现阶段对雷达接收机性能测试所采用的方法一般是给其提供一个不具有天气目标回波特征的单一频率的信号,这些信号能够通过测量系统通道的技术参数来验证系统硬件的性能。但由于这些测试信号不具有天气信号的时频特征,故测试结果仍与处理真实天气回波时的状态存在差异。而将实时天气目标回波作为接收机的测试信号的方法却有成本过高、测试过程复杂、所需时间长等缺点。除此之外,由于实时气象目标的参数是不可控的,所以这种方法不能实现对接收机性能参数的定量测试。如果能够模拟产生具有真实天气目标特征的雷达回波信号,就可以在实验室环境中模拟完成外场试验所需的测试,同时也可以降低测试成本,缩短研发周期,提高工作效率[3]。除此之外,对模拟回波的参数进行控制,可以实现定量测试,进而可对接收机及后端的信号处理算法进行验证。 1 天气回波信号模拟的原理 由于天气目标的径向移动会造成接收信号的频率相对于发射信号的频率存在一定的频移(多普勒频移),即天气雷达回波信号可以看成原始发射信号在时间上的延迟并且频谱进行搬移后的一个时间序列,这就是回波信号模拟的基本原理[4]。 ZRNIC D S[5]在总结了滤波器法与快速卷积法等模拟算法后,从天气雷达回波信号的功率谱的角度,提出了简单实用的基于谱模型的直接拟合法。气象回波的功率谱密度函数为Pn(f): 其中,pr为回波的功率,fd为多普勒频率,f为频率标准差,PRF为脉冲重复频率,N 为样本个数。 由气象雷达方程及相关理论可知:pr=CZ/r2,fd=2vr。其中,C为雷达常数,只与雷达系统的参数有关;Z为反射率因子;r为气象目标与雷达站的径向距离;vr、v分别为径向速度和速度谱宽;为雷达发射电磁波波长。 为了模拟出具有真实回波信号的频谱特性,需要在式(1)中加入噪声,然后进行随机化可得式(4): 式中,随机变量rnd在区间[0,1]上具有均匀分布,PN(f)为每秒钟噪声总功率,则PN(f)/PRF为噪声功率谱密度。 为了获取回波信号的复频谱特征,需要在Pn(f)中引入0~2π变化的随机相位谱?渍n(f)=rnd·2π/rndmax,即可以构成回波信号的复频谱,然后将其进行离散傅里叶逆变换(IDFT)得到对应的时间序列sn:
雷达信号检测和估计
信号检测与估计理论在 雷达系统方面的应用摘要:随着互联网应用的普及及发展,信号的检测与估计技术的应用也越来越受到人们的 关注。雷达中的信号检测是一个综合性问题,涉及多个学科,多领域知识,所以它是科学领域最为关注的问题。近年来已经开展了大量雷达系统信号实现方法相关的研究课题,其中回波信号的检测和估计是最为重要的方面。本论文就是针对雷达信号检测和估计的精确性问题加以展开的。 关键词:雷达系统,信号估计,信号检测 第一章雷达系统 1.1起源和发展 早期雷达用接收机、显示器并靠人眼观察来完成信号检测和信息提取的工作。接收机对目标的回波信号进行放大、变频和检波等,使之变成能显示的视频信号,送到显示器。人们在显示器的荧光屏上寻找类似于发射波形的信号,以确定有无目标存在和目标的位置。随着雷达探测距离的延伸,回波变弱,放大倍数需要增加。于是,接收机前端产生的噪声和机外各种干扰也随着信号一起被放大,而成为影响检测和估计性能的重要因素。这时,除了降低噪声强度之外,还要研究接收系统频带宽度对发现回波和测量距离精度的影响。这是对雷达检测理论的初期研究。后来,人们开始在各种干扰背景中对各种信号进行检测和估计的理论研究,其中有些结论,如匹配滤波理论,关于滤波、积累、相关之间等效的理论,测量精度极限的理论,雷达模糊理论等,已在实际工作中得到应用.
1.2雷达的概述 雷达的英文名字是radar,是“无线电探测与定位”的英文缩写。雷达的基本任务是探测感兴趣的目标,测定有关目标的距离、方问、速度等状态参数。雷达主要由天线、发射机、接收机(包括信号处理机)和显示器等部分组成。 雷达发射机产生足够的电磁能量,经过收发转换开关传送给天线。天线将这些电磁能量辐射至大气中,集中在某一个很窄的方向上形成波束,向前传播。电磁波遇到波束内的目标后,将沿着各个方向产生反射,其中的一部分电磁能量反射回雷达的方向,被雷达天线获取。天线获取的能量经过收发转换开关送到接收机,形成雷达的回波信号。由于在传播过程中电磁波会随着传播距离而衰减,雷达回波信号非常微弱,几乎被噪声所淹没。接收机放大微弱的回波信号,经过信号处理机处理,提取出包含在回波中的信息,送到显示器,显示出目标的距离、方向、速度等。 为了测定目标的距离,雷达准确测量从电磁波发射时刻到接收到回波时刻的延迟时间,这个延迟时间是电磁波从发射机到目标,再由目标返回雷达接收机的传播时间。根据电磁波的传播速度,可以确定目标的距离为:S=CT/2 其中S:目标距离;T:电磁波从雷达到目标的往返传播时间;C:光速 1.3雷达的工作原理 雷达是利用目标对电磁波的反射(或称为二次散射)现象来发现目标并测定其位置的空间任一目标所在位置可用下列三个坐标来确定:1>目标的斜距R;2> 方位角a;3>仰角B。同时也就是说根据雷达接收到的信号检查是否含有目标反射回波,并从反射回波中测出有关目标状态的数据。 第二章雷达中的信号检测 雷达的基本任务是发现目标并测定其坐标通常目标的回波信号中总是混杂着噪声和各类干扰而噪声和各种干扰信号均具有随机持性在这种条件下发现目标的问题属于信号检测的范畴信号检测理论就是要解决判断信号是否存在的方法及其最佳处理方式。 2.1.雷达信号的最佳检测及基本概念 检测系统的任务是对输入信号进行必要的处理和运算然后根据系统的输出来判断输入是否有信号存在它可用门限检测来描述。 检测过程中,由于门限取值的不同产生的错把噪声检测成了目标,这类错误称之为虚警,出现的概率称为虚警概率;反之,错把信号当成了噪声,称为漏检或漏警,相应出现概率为漏检概率。 门限的确定与选择的最佳准则有关。在信号检测中常采用的最佳准则有贝叶斯准则最小错误概率准则最大后验概率准则极大极小化准则以及纽曼—皮尔逊准则等。
雷达原理.doc
一、绪论 雷达:无线电探测与测距。利用电磁波对目标检测、定位、跟踪、成像和识别。 雷达利用目标对电磁波的反射或散射现象来发现目标并测定其位置的。定时器发射机收发开关天线 显示器接收机天控系统 组成框图 雷达测量原理 雷达发射信号: 雷达接收信号: 雷达利用收发信号之间的相关性获取目标信息 雷达组成: 天线:向确定的方向发射和接收特定频段的电磁波 收发开关: 发射状态将发射机输出功率接到天线,保护接收机输入端 接收状态将天线接收信号接到接收机,防止发射机旁路信号
发射机:在特定的时间、以特定的频率和相位产生大功率电磁波 接收机:放大微弱的回波信号,解调目标信息 雷达的工作频率: 工作频率范围:22mhz--35ghz 扩展范围: 2mhz--94ghz 绝大部分雷达工作在:200mhz--10000ghz 雷达的威力范围:最大作用距离、最小作用距离、最大仰角、最小仰角、方位角范围 分辨力:区分点目标在位置上靠近的能力 距离分辨力:同一方向上两个目标之间最小可区别的距离 角度分辨力:在同一距离上的两个不同方向的点目标之间最小能区别的角度 数据率:雷达对整个威力范围内完成一次搜索所需要的时间倒数,也就是单位时间内雷达所能提供对一 个目标数据的次数。 跟踪速度:自动跟踪雷达连续跟踪运动目标的最大可能速度 发射功率的和调制波形: 发射功率的大小直接影响雷达的作用距离 发射信号的调制波形: 早期简单脉冲波形,近代采用复杂波形 脉冲宽度:脉冲雷达发射信号所占的时间。影响探测能力和距离分辨力 重复频率:发射机每秒发射的脉冲个数,其倒数是重复周期。决定单值测距的范围,影响不模糊速区域大小 天线波束形状天线:一般用水平面和垂直面内的波束宽度来表示 天线的扫描方式:搜索和跟踪目标时,天线的主瓣按照一定规律在空间所作的反复运动。机械性扫描和电扫描 接收机的灵敏度:通常规定在保证 50%、90%的发现概率条件下,接收机输入端回波信号的功率作为接收 机的最小可检测信号功率。这个功率越小接收机的灵敏度越高,雷达的作用距离越远。 显示器的形式和数量:雷达显示器是向操纵人员提供雷达信息的一种终端设备,是人际联系的一个环节。