PMC3系列操作手册V1.1
PMC-320单相导轨式预付费电能表用户说明书_V1.0

2 技术指标............................................................................................................................................................2 2.1 环境条件....................................................................................................................................................2 2.2 电压线路....................................................................................................................................................2 2.3 电流线路....................................................................................................................................................2 2.4 电能脉冲....................................................................................................................................................2 2.5 通信接口....................................................................................................................................................2 2.6 端子螺丝紧固力矩................................................................................................................................... 3 2.7 外壳防护等级(IP)................................................................................................................................3 2.8 污染等级....................................................................................................................................................3 2.9 准确度........................................................................................................................................................3 2.10 绝缘性能....................................................................................................................................................3 2.11 机械性能....................................................................................................................................................3 2.12 电磁兼容性................................................................................................................................................4
Soundiron Ambius 3 Expanse 1 用户手册说明书
Found installer for: [EXs name]
Space required: [nnn] MB SSD1: [disk name] [nnn] GB available
10. Press Install to continue with the installation, or press Cancel to stop without installing. An “are you sure?” message will appear to confirm the installation.
Global “0–3: KSC Auto‐Load” on page 762 Global “0–4: Sample Management” on page 765 Disk mode menu command “Load .PCG” on page 829 Disk mode menu command “Load .KSC” on page 838
7. Open the folder containing the EXs data from step 2.
8. Select the file whose name ends in .exsins. The “exsins” suffix stands for “EXS INStaller.” For instance, an installer file might be named “EXs10.exsins.” When an .exsins file is selected, the Load button changes to read Install. Only one EXs can be installed at a time. If Multiple Select is On, Install will be disabled.
PMC3
窗口功能及其应用
FANUC16i/18i/21i/0i
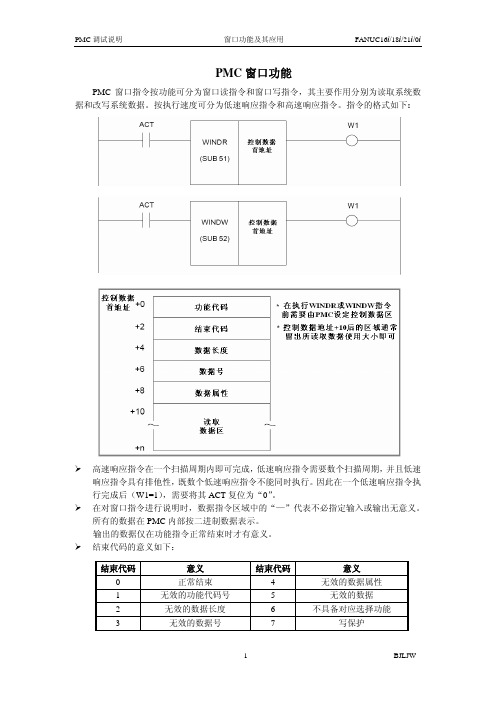
PMC 窗口功能
PMC 窗口指令按功能可分为窗口读指令和窗口写指令,其主要作用分别为读取系统数 据和改写系统数据。按执行速度可分为低速响应指令和高速响应指令。指令的格式如下:
¾ 高速响应指令在一个扫描周期内即可完成,低速响应指令需要数个扫描周期,并且低速 响应指令具有排他性,既数个低速响应指令不能同时执行。因此在一个低速响应指令执 行完成后(W1=1),需要将其 ACT 复位为“0”。
需要注意的是读出的坐标值是实际坐标的 1000 倍。
11
BJLJW
PMC 调试说明
窗口功能及其应用
FANUC16i/18i/21i/0i
六:程序检测画面刀号显示
在 FANUC 16i/18i/21i/0i 系列中,设定参数 3105#2DPS 为 1 后,可以在显示器的右下角 处显示主轴速度和当前 T 代码。但 T 代码并不一定与当前工作位置刀号一致。如果需要对 所有方式均在显示器画面(程序检测画面)中显示当前刀号,可以按下表设定参数,此时不 再显示右下角的 T 代码项,而是在程序检测画面的模态显示区中显示当前刀号(HD.T)和 预选刀号(NX.T)。这两个项目中的数值是由 PMC 的窗口功能来赋值的。
意义 无效的数据属性
无效的数据 不具备对应选择功能
写保护
1
BJLJW
PMC 调试说明
窗口功能及其应用
FANUC16i/18i/21i/0i
¾ 控制数据区可以选择 R 地址区或 D 地址区,如果选择 R 地址区,只能在 PMC 程序中 对控制数据赋值,如果选择 D 地址区,既可以在 PMC 程序中赋值,也可在数据表画面 中赋值。但在数据表画面赋值时需要注意设定数据类型为二进制数据,数据长度为字型, 因为每个控制数据占用两个字节。部分功能指令的每项输出需要四个字节,在分配数据 表和设定数据类型时须加以注意,否则显示数据不直观。
PMCM I PMC V 说明书V

PMC-53系列三相数字式多功能测控电表使用说明书(PMC-53M/53I/53V)(V3.1)深圳市中电电力技术有限公司危险和警告本设备只能由专业人士进行安装,对于因不遵守本手册的说明所引起的故障,厂家将不承担任何责任。
触电、燃烧或爆炸的危险⏹设备只能由取得资格的工作人员才能进行安装和维护。
⏹对设备进行任何操作前,应隔离电压输入和电源供应,并且短路所有电流互感器的二次绕组。
⏹要用一个合适的电压检测设备来确认电压已切断。
⏹在将设备通电前,应将所有的机械部件,门和盖子恢复原位。
⏹设备在使用中应提供正确的额定电压。
不注意这些预防措施可能会引起严重伤害。
本说明书版权属深圳市中电电力技术有限公司所有,未经书面许可,不得复制,传播或使用本文件及其内容,违犯者将要对损坏负责。
深圳市中电电力技术有限公司保留所有版权。
我们已经检查了本手册关于描述硬件和软件保持一致的内容。
由于不可能完全消除差错,所以我们不能保证完全的一致。
本手册中的数据将定期审核,并在下一版的文件中做必要的修改,欢迎提出修改建议。
以后版本中的变动不再另行通知。
目录1概述................................................................................. 错误!未指定书签。
1.1功能介绍 ..................................................................... 错误!未指定书签。
1.2系统应用 ..................................................................... 错误!未指定书签。
2技术指标 ........................................................................... 错误!未指定书签。
三轴联动PMC3型运动制器

ROLLON
4.2 PMC 与电脑连接说明
厦门热龙智能科技有限公司
1. PMC 是通过串口与电脑通讯和下载数据,在 PMC 的输出端有 8 针圆孔的 S 端子,脚位定义如下:
8 76
5
43
21
*接口定义=台达或信捷接口定义相同 请购买台达或者信捷通讯线而非下载 线
2. 与电脑连接方式: 2.1 PMC 专用数据线:
打开设备管理器------》找到端口
注意: 1.每个 USB 接口插入后,端口号不同。 如果打开软件显示,打开失败。请重新打 开《设备管理器》查看此端口是否正确。 否则检查 USB 线或者驱动程序。
记住此端口号 此图中为:COM3 代表此为虚拟第 3 个 串口
13 / 55
ROLLON
厦门热龙智能科技有限公司
7 / 55
ROLLON
厦门热龙智能科技有限公司
3.3 输出口接线
输出口 Y0
输出口 Y1
输出口 Y2
输
出
输出口 Y3
口
输出口 Y4
输出口 Y5 输出口 Y6 输出口 Y7
COM
+24VDC GND
※输出说明:
1.输出为 NPN 集电极开路输出,动作的时候输出低电平。 2.公共端 COM 本身控制其内部与 24V 电源负极连接。如果为增强抗干扰性,可以选择外部
DIRZ:Z 轴方向
8 / 55
PULS(脉冲+) PULS(脉冲--) DIR(方向+) DDIIRR((方方向向---))
驱动器 X
PULS(脉冲+) PULS(脉冲--) DIR(方向+) DIR(方向-)
驱动器 Y
PMC-6830L 可编程备自投装置使用说明书_V1.1_20110902

1
目
录
PMC-6830L 使用说明书 版本 V1.1
1 装置简介...........................................................................................................................................................3 1.1 概述................................................................................................................................................................3 1.2 产品特点........................................................................................................................................................ 3 1.3 基本功能........................................................................................................................................................ 3
(完整版)PMC-530使用说明书

目录第一章简介 (1)1.1 PMC-530前后面板示意图 (1)1.2 功能介绍 (1)1.2.1 高性能的电力测控智能装置 (1)1.2.2 输入和输出 (2)1.2.3 三相电力监视功能 (2)1.2.4 独特友好的用户界面 (2)1.2.5 报警、定值越限系统 (3)1.2.6 远程通信和联网功能 (3)1.3 系统应用 (3)第二章安装 (4)2.1 安装 (4)2.1.1 环境 (4)2.1.2 安装位置 (4)2.1.3 带显示面板的P M C-530的外观尺寸及安装开孔尺寸 (4)2.1.4 不带显示面板的P M C-530-T R A N的外观尺寸及安装开孔尺寸 (5)2.2 端子接线 (5)2.3 工作电源 (5)2.4 接地线的连接 (5)2.5 电压电流输入接线 (6)2.5.1 三相电压输入(V A、V B、V C、V N) (6)2.5.2 三相电流输入(I A、I B、I C) (6)2.5.3 P T和C T的接线 (7)2.5.4 电压参考点的连接 (7)2.5.5 三相星形系统的接线 (7)2.5.6 三相三角形系统的接线 (11)2.6 通信接线 (12)2.7 继电器的应用 (12)2.8 开关量输入的应用 (12)第三章基本操作 (03)3.1 简介 (13)3.2 开机 (13)3.3 显示模式 (13)3.3.1 面板显示 (13)3.3.2 面板按键 (13)3.3.3 参数说明 (19)3.4 工作方式设置 (20)3.4.1 简介 (20)3.4.2 进入/退出整定模式 (20)3.4.3 整定模式下各键的功能 (20)3.4.4 改变口令 (20)3.4.5 参数设置 (21)3.5 基本系统参数设置 (22)3.6 继电器输出(OUT1~OUT2) (23)3.7 开关量输入IN1~IN4 (23)第四章PMC-530技术指标 (04)4.1 精度指标 (24)4.2 三相交流电压输入(VA、VB、VC、VN) (24)4.3 三相交流电流输入(IA、IB、IC) (25)4.4 光电隔离开关量输入(IN1~IN4、COM) (26)4.5 继电器输出(OUT1、OUT2、OUT3、OUT4) (26)4.6 隔离通信接口 (27)4.7 工作电源(POWER) (27)4.8 工作环境 (27)第五章PMC-530配置说明 (27)5.1 基本配置 (27)5.2 可选配置 (27)5.3 标准配置 (27)5.4 配置举例 (28)5.5 通信参数 (28)第一章简介1.1 PMC-530前后面板示意图图1.1.1 带显示的PMC-530电力测控智能仪表前面板图图1.1.2 PMC-530电力测控智能仪表后面板图1.2 功能介绍1.2.1 高性能的电力测控智能装置PMC-530是一种数字式三相电力测控智能装置,直接针对一回线路设计,能够完成一回线路的监控功能,广泛用于工业、商业、民用电力系统和变电站中。
PMC说明书V

PMC-560型电力监控智能装置说明书(V4.0版)制定:审核:批准:HD-HDW-011-H00012004-10-25第一章简介1.1功能介绍高性能的电力监控智能装置PMC-560是一种数字式三相电力监控智能装置,直接针对一回线路设计,能够完成一回线路的“三遥”功能,广泛用于工业、商业、民用电力系统的变电站中。
PMC-560具有较高的性价比,集电能监测、分析、控制等功能于一体,符合分布式要求,可直接取代常规电力监控装置、变送器、测量仪表、RTU、事故记录和报警装置、谐波分析仪、故障录波仪和电能质量分析仪等。
PMC-560以12MHz、16位微处理器为核心,处理速度高,能够完成复杂的实时处理工作,既能单独完成电力监控任务,又能作为一个多功能的RTU工作于一个大型电力监控网络中。
表1.1PMC-560基本功能输入和输出PMC-560适用于各种星形、三角形电力系统。
电压接线方式包括四线星形接线、三线星形接线、三线三角形接线。
另外,PMC-560还具有一路IN 电流输入,可用来测量中性线电流或零序电流,它的高速越限系统可提供可靠的接地故障报警。
PT二次侧的三相交流电压可以直接接入PMC-560的电压输入端;CT二次侧的三相交流电流可以直接接入PMC-560的电流输入端,对于只有两相CT的情况,可以通过接线来得出另一相的电流。
另外,PMC-560还提供了电压输入额定为220V的配置,主要用于220/380VAC的星形系统直接接入。
PMC-560的电流输入额定有5A和1A两种配置,分别适应于CT 二次侧电流为5A和1A的情况。
PMC-560带有一路模拟量输入AI,通过选用不同的配置而具有不同的测量功能,如变压器温度、电池电压、PT开口三角电压(3U0)等。
12路开关量输入可用来监测断路器的状态、隔离开关的状态、继电保护动作或其他外部接点的状态,其中四路还可用作脉冲计数器,来测量电机转速、电能脉冲个数等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
致新老用户:当您能看到我们的产品并仔细阅读我们的手册时,表示您已经在关注我们,让我们倍感荣幸!为此我代表力为自动化所有同仁对您说声:谢谢您的支持!我们将秉承“力争更好,为您服务”的企业遵旨,信奉“成为自动化设备好帮手”的企业使命,遵循“客户第一、创造价值、诚信经营”的经营理念,全力满足您的需求,为用户提供高附加值的产品,实现多赢目标!我们将为自动化行业打造“中国式控制系统”的精品而奋斗!因为有您的需求,因为有您的支持,才有我们的发展!我们愿意一路与您牵手同行,一起成长!深圳市力为自动化有限公司)自主研发的标准控制系统的操作方法、功能特点、应用说明等。
为让您能简单快速掌握产品的使用特点,《手册》将按照用户零体验方式编排,在阅读中的术语有专门详解。
请用户在所有硬件环境搭建无误情况下,务必逐项认真阅读。
PMC3XXX 系列硬件产品,且适配触摸屏人机界面(目前仅支持台湾威纶品牌7寸触摸屏)。
本手册版权归力为公司所有,未经书面许可,任何人不得翻印、翻译和抄袭本手册中的任何内容。
由于软件升级原因,力为公司保留对本资料的最终解释权,内容如有更改,恕不另行通知!目录第一章界面介绍 (6)1.1欢迎界面 (6)1.2系统参数 (6)1.2.1轴配置参数界面 (7)1.2.2速度参数 (9)1.2.3功能参数 (10)1.3设备调试 (11)1.3.1运动测试 (12)1.3.2IO测试 (13)1.4运行界面 (13)第二章工艺编程 (16)2.1文件编辑 (16)2.1.1复位文件 (17)2.1.2U盘管理 (17)第三章指令介绍 (19)3.1指令概念 (19)3.2指令编辑 (20)3.3指令列表 (20)3.4指令详解 (21)3.4.1绝对插补 (21)3.4.2相对插补 (22)3.4.3绝对联动 (23)3.4.4相对联动 (24)3.4.5平面圆弧 (25)3.4.6空间圆弧 (26)3.4.7螺旋 (27)3.4.8空间螺旋 (28)3.4.9输入检测 (30)3.4.10输出控制 (31)3.4.11气缸控制 (32)3.4.12循环 (33)3.4.13直接跳转 (33)3.4.14条件跳转 (34)3.4.15局部零点 (35)3.4.16复位 (36)3.4.17回零 (36)3.4.18暂停 (37)3.4.19延时 (38)3.4.20矩阵 (38)3.4.21扩展轴 (39)3.4.22绕线 (40)3.4.23同步甩线 (40)3.4.24调子程序 (41)3.4.25调用文件 (42)3.4.26标识 (42)3.4.27程序结束 (43)第四章工艺案例 (44)4.1复位工艺 (44)4.1.1实例1 (44)4.1.2实例2 (45)第一章界面介绍1.1 欢迎界面图1.1.1该界面(图1.1.1)主要是用于自动化设备厂家展示公司信息。
其中包含3个按键:【系统参数】、【设备调试】、【我要使用】。
进入【系统参数】后,是用于设置和设备配置有关的参数,如运动轴的脉冲当量、复位方向、复位电平、速度参数等;进入【设备调试】后,是用于测试设备上所有IO、电机运动是否正确;进入【我要使用】后,则进行工艺编程,开始使用设备了。
所以,建议用户按照先配置【系统参数】,再【设备调试】,最后【我要使用】的顺序进行系统使用。
1.2 系统参数进入该界面后,主要进行与设备硬件配置相关参数的设置。
在每个画面下,均可以使用【上一页】、【下一页】进行画面切换,使用【退出】按键进行返回操作。
注意:退出之前,务必进行【保存】操作,避免参数丢失!当一台全新设备初次上电后,需要调试前,务必对【系统参数】项进行先设置。
否则机器将处于非正确工作模式下,甚至出现错误!1.2.1轴配置参数界面图1.2.1.1该界面下,可以对每个运动轴的属性、指令单位、复位方式、复位方向、复位电平、复位顺序、软硬限位开关、示教速度、密码管理进行设置。
<轴属性>:可以把当前运动轴配置成<直线轴>或<旋转轴>。
标示当前运动轴所实现的机构运动是直线运动还是旋转运动。
<指令单位>:系统脉冲当量,即当前轴在一个指令脉冲下,终端机构所执行的最小距离。
建议<直线轴>配置为0.001(一个脉冲终端执行0.001毫米);<旋转轴>配置为0.1(一个脉冲终端执行0.1度)。
<复位方式>:定义运动机构回机械原点时的找零点方式。
现在可以支持3种模式:一次回零、二次回零、回零反找。
常用回零反找模式。
<复位方向>:定义运动轴在找机械原点时的方向。
支持正向、负向找原点。
<复位电平>:定义机械原点感应器输出电平。
支持高、低电平。
<复位顺序>:定义当前轴在整个复位过程中的次序。
当每个轴该参数选择相同时,表示同时找机械原点。
当该参数选择不同时,数字小的先找到机械原点后,数字大才开始找机械原点。
<软限位>:定义是否开启软限位功能。
如果开启,则在设置了每个轴的软限位参数后,在教导、编辑、运行与运动相关的指令时,将实时监控是否超出限位。
一旦超出将立即弹出报警提示!<硬限位>:定义是否开启硬限位功能。
如果开启,则在教导、编辑、运行与运动相关的指令时,一旦超出该限位将立即弹出报警提示!<示教速度参数>:为方便用户在教导轴和运动相关位置参数时,快速选择教导速度。
目前可以自定义高、中、低3种速度值(最高速度为参考比例)。
【密码设置】:在进入该界面后,可以设置对应权限的密码。
如果设置为0,则表示无权限限制,在任何操作下均不需要输入密码验证。
建议用户调试结束务必设置该参数,以防止他人随意操作。
【下一页】:进入下一参数设置界面。
【保存】:对当前画面系统参数进行保存。
【退出】:返回至运行界面。
(图2)1.2.2速度参数图1.2.2.1在该参数界面下,主要进行与各个轴教导、运动相关的速度参数设置。
<起始速度>:主要控制步进电机时,需要设置的起跳速度。
<最高速度>:控制运动轴的最高转速。
<回零速度>:控制运动轴在复位过程中的运行速度。
<加速度>、<减速度>:控制运动轴加减速快慢。
该数值越大,标示加/减速越快。
<补偿>:当机构在运行中存在往返恒定误差时,通过该参数补偿。
一般不使用。
<软限位+>、<软限位->:通过软件限制运动轴的运行范围。
可以和硬限位共同使用。
<插补指令速度>:设定插补运动指令的运行速度。
<插补指令加减速>:针对插补运动指令的加减速时间,数字越大表示加减速越慢。
<螺旋指令速度>:设定螺旋、空间螺旋指令的运行速度。
<螺旋指令加减速>:针对螺旋、空间螺旋指令的加减速时间,数字越大表示加减速越慢。
<连续插补>:设置是否开启连续插补功能。
当选择开启时,所有的运动指令将连 续运作。
这将提高设备运行效率。
<S型曲线>:设置运动轴运行轨迹的曲线程度,设置范围0~1。
为0时,运动曲线为 梯形曲线。
数值越大S曲线上升和下降时间越长,轴起停越平稳。
1.2.3功能参数图1.2.3.1在该参数界面下,主要设置与设备工艺相关的特殊功能。
<分配专用输入口>:主要是定义特殊功能输入口。
也是对系统输入口资源进行有效管 理的一种方法。
如果不使用这些特殊功能输入口,则设置0即可,那么就对应释放一个通用输入口。
其中:<低气压检测>:用来检测设备总气阀气压的。
一旦设定,则开机自检对应输入口为低 电平时,标示气压过低。
会有报错提示,只有排除问题,才能正常使用设备。
<安全门检测>:用来检测安全门是否关上。
在启动运行时检测。
<预约按钮>:用来定义外部【预约按钮】开关。
在程序结束时检测,如果对应输入口 为低电平(即预约成功),表示让设备自动再运行一次。
<原点>:用来定义运动轴机械原点输入口。
最多6轴,6个原点。
<正负限位>:用来定义所有轴对应的硬限位输入口。
最多6轴,12个硬限位。
<串行伺服报警>:用于定义某1个输入口,作为所有运动轴伺服报警输入口。
<断线>:在程序运行时实时监测某个输入口的状态。
为丰富应用,可以选择在<运动中>检测,或<周期>性的在启动程序时检测。
当出现输入口状态错误时,让设备<周期停>在当前循环周期完成后再停止,或者让设备立即<暂停>。
<手柄功能>:目前可支持IO矩阵式手柄(4X4点阵),用户可选择不使用。
<暂停模式>:当程序运行过程中,操作人员按下【暂停】键,程序则<立即停>,或者 执行完当前指令后进行停止:<边界停>。
<并行伺服报警>:每个轴分别使用专用的伺服报警输入口时使用。
<状态灯开关>:当开启时,外部输出口的“运行”、“停止”、“故障”指示等将启用。
当关闭时,对应的外部输出口被释放,作为通用输出口使用。
<复位文件开关>:当开启时,操作【复位】键,设备将按照已经编辑好的“复位文 件”进行设备的复位。
当关闭时,则复位时,运动轴先按配置的<轴复位顺序>进行找机械原点,待所有轴找到机械原点后,气缸再回到原位。
<复位后自动回零>:当开启时,复位动作完成后运动轴将再次定位到工件零点,系统再进入待机状态。
当关闭时,复位操作完成后进入待机状态。
<自动复位周期>:设置范围0~999。
一旦设置为非零值X,则表示设备在运行X次 程序后自动会进行一次复位操作。
如果设0,则永远不会自动复位。
<单次产量>:设置范围1~99。
表示每运行完一次程序的实际产能。
1.3 设备调试进入该项操作后,有2个画面(运动测试、IO测试)。
是用于对设备运动轴、IO 进行检测是否已经按配线图配置正确。
同时检验运动机构的相应系统参数是否设置正确(指令单位、速度等)。
图1.3.1.1该界面下主要测试每个运动轴的配置。
【X+、X-】:X轴示教操作按钮按钮用于对X轴进行双方向调试。
如果【X+】操作时,显示坐标在减小(即轴向负向运动),或者【X-】操作时,显示坐标在增大(即轴向正向运动),则表示实际配线(Dir+、Dir-需要对调)错误。
需要设置伺服驱动方向参数、或者对调Dir+、Dir-信号线即可解决。
其他Y——B轴同解。
【X轴复位】:表示让X轴回机械原点。
在此操作之前,务必确认X轴原点正确。
其他Y——B轴同解。