动车组控制系统(4)
《动车组控制系统》课件

动车组控制系统的 实际案例分析
案例背景:某国内动车组控制系统的实际应用 控制系统组成:包括信号处理、控制算法、人机交互等模块 控制效果:实现了动车组的精确控制和稳定运行 应用效果:提高了动车组的运行效率和安全性,降低了维护成本
案例背景:某国际 知名动车组制造商
控制系统特点:采 用先进的信号处理 技术,实现高速、 稳定、安全的运行
子系统。
动车组控制系统 通过接收来自司 机的指令,控制 动车组的运行速 度和方向,确保 动车组的安全、
高效运行。
动车组控制系统 采用先进的计算 机技术、通信技 术和控制技术, 具有较高的智能 化和自动化水平。
列车控制单元(TCU):负责列车的运行控制和故障诊断 牵引控制单元(TCU):负责牵引电机的驱动和控制 制动控制单元(BCU):负责制动系统的控制和故障诊断 车门控制单元(DCU):负责车门的开关和故障诊断 空调控制单元(ACU):负责空调系统的控制和故障诊断 乘客信息系统(PIS):负责向乘客提供信息和娱乐服务
动车组控制系统
汇报人:
目录
添加目录标题
动车组控制系统的 概述
动车组控制系统的 技术原理
动车组控制系统的 应用和发展
动车组控制系统的 实际案例分析
结论与展望
添加章节标题
动车组控制系统的 概述
动车组控制系统 是动车组列车的 核心组成部分, 负责控制动车组 的运行、制动、 车门开关等操作。
动车组控制系 统包括列车控 制、牵引控制、 制动控制、车 门控制等多个
感谢您的观看
汇报人:
展望:未来动车组控制系统将更加智能化、自动化,实现列车的自动驾驶和智能调度,提高 列车运行效率和安全性。
智能化:实现动车组控制系统的自动化、智能化,提高运行效率和安全性 绿色环保:采用环保技术,降低能耗,减少对环境的影响 网络化:实现动车组控制系统的网络化,提高信息共享和协同能力 创新技术:不断研发新技术,提高动车组控制系统的性能和可靠性
动车组控制系统维护与检修任务4-4

任务四 辅助电路分析
9.辅助电源装置 电源从牵引变压器MTr3次巻线经由交流电路接触器 ACK1,从704、754线获得单相、400V、50Hz。771、781 、791线为辅助电源装置3相、400V±10%、50Hz输出(5 列、E,F行)、贯穿T1c-1、M2-2、M1-3、T2-4编组的前 半部分。771G、781G、791G线为辅助电源装置冷却风 扇驱动用电源、113线为辅助电源装置控制电源。251 线仅仅是使用辅助变压器ATr、把牵引变压器3次绕组 的非稳定化电压变换成单相100V的非稳定化电源。 112G线输出过分相检测信号。
4
任务四 辅助电路分析
二、保护接地电路 1.EGS关闭指令: 以保护接地开关投入开关EGCS1关闭对EGS投入指令109 线(3列、A、B行)加压。 2.EGS开指令: 以保护接地开关开放开关EGOS1关闭对EGS断开指令108 线(3列、A、B行)加压。
5
任务四 辅助电路分析
三、预备灯切换电路 通过按下预备灯切换开关RrLpCgS(4B),对预备灯投 入指令170线加压,RrLpCgK(1E) 被励磁,然后191线励磁,预备灯(2h)亮灯。同时对预备 灯切换继电器RrLpCgR线圈(4B)(此接点的用途在后述文 章中会涉及)加压。联挂其他编组时,把上图的BV(运行非常)、JBVR、103线换读成RrLpCgS、JRrLpR(但因接 点容量的关系,不是直接通过JRrLpR,而是经过一段中 介通过JRrLpK)、170线,使JRrLpR(分并切换电路连接 请 参照1P191620-5700 14I)动作,关闭其接点,对JRrLpK 线圈加圧,也能从102线对预备灯投入指令107线加压, 对联挂编组侧发出预备灯投入指令。
6
任务四 辅助电路分析
动车组网络控制系统及其技术分析

动车组网络控制系统及其技术分析摘要:动车组网络控制系统(TCMS)系统是一列车的神经中枢,负责完成与各个子系统之间的数据传输、逻辑控制、故障诊断等工作,是一列车能够安全运行的保障。
现在世界各国轨道交通行业中,TCN网络无论是在动车组、地铁还是轻轨,都得到了广泛的应用。
关键词:动车组;网络控制系统;技术前言迄今为止,我国铁路已经经历了6次大提速,列车运行速度不断加快,不仅方便了人们的出行,同时也进一步加深了我国各地区之间的联系。
列车运行的基础是安全,尤其是在当前列车运行速度进一步提升的隋况下,安全是重中之重。
网络控制系统作为整个动车组的中枢神经,是动车组平稳安全运行的重要保障。
1网络控制系统CR400BF动车组通信网络由WTB(列车总线)与MVB(多功能车辆总线)构成,属于2级通信网络,二者的数据传输速率略有差异。
动车组网络控制系统的基本构成为:中央控制单元、输入输出模块、无线传输装置、司机显示屏、、MVB中继器、网关、牵引控制装置、制动控制装置、空调控制装置、辅助变流器装置、旅客信息系统、车门控制装置以及充电机控制装置。
2动车组网络控制系统关键技术2.1以太网通信网络控制技术动车组采用以太网作为数据传输总线,总线通信控制方案同样采用传统网络的两级总线架构,分为列车级总线和车辆级总线,并由最小的可配置编组单元通过列车级以太网线级联构成整个列车通信网络。
实现不同的最小可编组单元的级联,为列车快速地建立起一个高可靠性的灵活可配置的控制网络,提高传输列车控制信息的实时性,确保列车的正常运行;车辆级总线采用线性拓扑结构,传输速率为100Mbit/s,使用TRDP协议进行封装传输,符合IEC61375—3—4标准。
最小可编组单元设有ECN,其中ECN可以根据可配置编组单元内含有的车辆数灵活增加,通过ECN级联,实现可配置编组单元内子系统与网络控制系统的建列车级以太网车辆级以太网车辆控制器数据采集模块远程数据传输装置通信,实现以太网数据交换。
动车组网络控制系统及其技术分析
动车组网络控制系统及其技术分析摘要:动车组网络控制系统(TCMS)主要利用车载计算机网络对列车进行监控,通过贯穿列车运行的总线传输信息,能够对列车运行和车载设备进行实时监控和集中管理,实现车辆逻辑控制、状态监测和故障诊断等功能,确保列车安全稳定运行。
在设备出现故障的情况下,网络控制系统可以为司机和乘务人员提供方便有效的引导,记录和分析相关数据,为设备维护和旅客服务提供支持。
关键词:动车组;网络控制系统;多网融合;轨道交通技术;动车组的网络控制系统相当于人的大脑和神经,它在保证列车的行车安全、可靠性、舒适性方面具有至关重要的作用;为了给相关产品的网络控制系统设计提供借鉴,通过梳理中车已有典型动车组产品的网络控制系统,提取共性特征,总结归纳了动车组网络控制系统的组成、系统功能、拓扑功能、主要参数等内容;同时,乘客需求的提升以及轨道交通装备技术的不断升级,对动车组在速度、舒适性、智能化等方面提出了更高要求,为了明确动车组列车网络控制系统的发展方向,通过查询专利文献等途径,得出动车组网络控制系统新技术研究多集中在多网融合、列车冗余优化设计、列车自动驾驶、无线通信等方向,可以为轨道交通技术特别是网络控制系统技术的相关研究提供参考。
一、动车组网络控制系统功能1.通信功能。
动车组网络采用符合IEC61375标准的列车通讯网络,采用列车总线和车辆总线两级总线。
列车总线为WTB总线,用于传输各牵引单元间的信息。
车辆总线为MVB总线和CAN总线,用于连接一个牵引单元内的设备,实现设备的控制、监视和故障诊断功能。
该系统能够实现网络通信协议,为网络上的车载设备提供实时、确定的信息交互通道,保证网络上设备通信正常。
2.控制功能。
基于网络通信功能,完成对包括牵引系统、辅助系统、制动系统、空调系统等在内的列车控制。
网络控制系统具备对牵引系统的控制功能与接口,能够传输牵引系统控制指令,并监视牵引系统工作状态,能够实现对牵引设备的隔离和恢复。
动车组网络控制系统概述

动车组网络控制系统概述发布时间:2021-07-02T07:56:34.121Z 来源:《中国科技人才》2021年第10期作者:吴连军[导读] 网络控制系统作为高速动车组的关键系统之一,对列车的正常运行至关重要。
近年来,随着互联网技术的不断发展,高速动车组日趋智能化,列车生产、运行、维护产生的信息量越来越大,这对整个网络控制系统提出了更高的要求。
中车工业研究院(青岛)有限公司青岛 266109摘要:网络控制系统作为高速动车组的关键系统之一,是列车正常运行必不可少的一部分。
本文对动车组网络控制系统的拓扑结构、系统配置、系统功能等进行了综合论述。
关键词:动车组;网络拓扑;系统配置;系统功能1.引言网络控制系统作为高速动车组的关键系统之一,对列车的正常运行至关重要。
近年来,随着互联网技术的不断发展,高速动车组日趋智能化,列车生产、运行、维护产生的信息量越来越大,这对整个网络控制系统提出了更高的要求。
动车组网络控制与管理系统[1](Train Control and Management System,TCMS)作为列车中枢神经系统,通过贯穿列车的总线进行信息传输,对车辆运行和车载设备动作的相关信息进行集中管理,实现车辆逻辑控制、状态监视、故障诊断及测试功能,从而保证列车安全可靠的运行,为司机和乘务员的操作提供有效指导,为设备的维护保养和乘客的服务提供支持。
本文论述了动车组网络控制系统的结构、系统配置、系统功能,提供了网络系统的整体框架,并为后续网络系统的发展提供理论支持。
2.系统拓扑结构动车组网络控制系统采用TCN+以太网(环形)拓扑架构[2]。
其中,TCN符合列车通信网络IEC 61375标准及GB/T 28029标准的列车网络,为两级总线式拓扑结构,两级总线分别为列车级WTB总线和车辆级多功能MVB总线,两级总线之间的数据转换采用WTB/MVB网关。
同时,列车级总线还设置有以太网(环形)。
WTB 总线为绞线式列车总线,是连接在动车组MVB单元之间的双绞屏蔽线线路[3],由网关控制,通过自动车钩覆盖整车,允许重联操作。
动车组牵引传动系统(4)

12
第四章 动车组牵引传动系统
牵引传动系统主电路构成
31
第四章 动车组牵引传动系统
谢 谢!
32
Mc1
Tp1
M1
M3
Tb
M2
Tp2
Mc2
Mc1
Tp1 PT
M1
M3
CT LB
SA VT
ES
LB
Tb
M2
VT
LB
ES
Tp2
LB VT
PT CT
LB
ES
Mc2 SA
TM MC
MC
AC 3T IC
LC 2F
LF
BC BA
SA
MT LC
MC
TM
TM MC
SA LC
MC 2F
MC 2F
AC 3T
AC 3T
IC IC CT
逆变器控制策略:逆变侧采用了VVVF的控制方式,整流器输入给支 撑电容器的直流电压,依据无接点控制装置控制信号,输出变频变压的三 相交流电对4台并联的电机进行速度、力矩控制。再生制动时牵引电机发 出三相交流电,经整流后向支撑电容器输出直流电压。
牵引电机控制采用矢量控制方式,独立控制力矩电流和励磁电流,以 使力矩控制高精度化、反应高速化,提高电流控制性能。
7
第四章 动车组牵引传动系统 牵引传动系统的能量传递与转换过程示意图
主变压器 高压侧变流器 牵引逆变器 牵引逆变器
动车组列车控制管理系统简述
摘要:介绍了动车组列车控制管理系统的基本构成以及主要功能,阐述了动车组列车控制管理系统的冗余设计要点,为动车组列车控制管理系统设计提供了参考。
关键词:动车组;列车控制管理系统;TC CCU;TDS CCU引言列车控制管理系统(TCMS)是用于控制、监督和管理列车及各子系统的分布式电脑系统,可直接或间接地通过离散的输入输出单元(MIO)监控随车系统以及与列车通信网络连接的子系统。
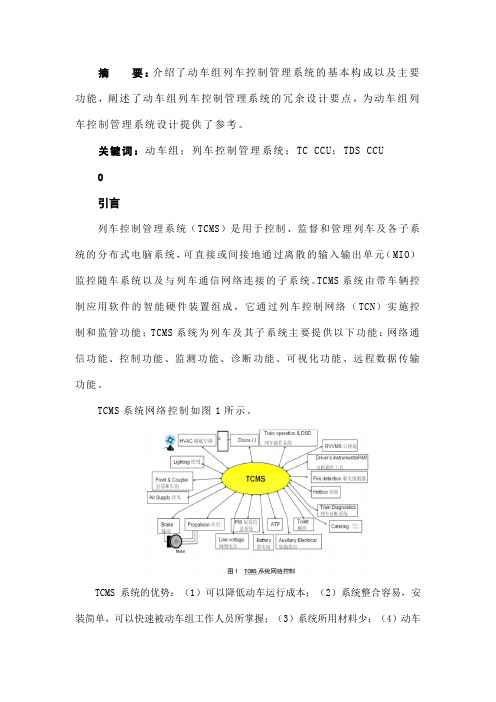
TCMS系统由带车辆控制应用软件的智能硬件装置组成,它通过列车控制网络(TCN)实施控制和监管功能;TCMS系统为列车及其子系统主要提供以下功能:网络通信功能、控制功能、监测功能、诊断功能、可视化功能、远程数据传输功能。
TCMS系统网络控制如图1所示。
TCMS系统的优势:(1)可以降低动车运行成本;(2)系统整合容易,安装简单,可以快速被动车组工作人员所掌握;(3)系统所用材料少;(4)动车组可以根据运行需求,进行TCMS系统功能的变更与添加,提高了动车组运行操作的便捷性;(5)重量轻;(6)系统可靠性强,可保障动车组的安全运行。
TC CCU(控制系统)和TDS CCU(诊断系统)是TCMS系统的重要组成部分,二者可以根据不同的设计需求设计不同的系统功能,TC CCU是负责控制列车运行中各种数据的系统,既负责整合车辆车载设备信息,又控制动车组各系统的运行模式。
TDS CCU对动车组各系统的运行进行监控,并进行系统故障诊断,提高了动车组运行的可靠性、安全性,保障了动车组列车运行的稳定性。
TC CCU和TDS CCU具有平台分割机制,可以为动车组提供安全保障、操作保障与舒适度保障。
安全保障是指TC CCU和TDS CCU可以提高整个动车运行安全水平,例如通过控制或监视功能,对动车组的运行进行控制与监视,保障动车组的安全运行。
操作保障是指通过控制功能、车载设备监视功能以及相关的辅助功能,保障动车组操作的科学化与便捷化。
舒适度保障是指在有需要时通过控制车辆所有非关键功能、车辆诊断功能、车载车辆管理功能以及相关辅助功能,为动车组运行提供更多的便利,提升乘客的舒适度。
动车组制动系统维护与检修项目四
一、动车组制动控制系统概述
制动控制系统是制动设备在司机、列车自动控制系统
ATC 或安全装置等的作用下,产生、传递制动指令,并对
制动力进行计算、分配、协调和控制的部分。
任务二 检修司机制动控制器
司机制动控制器由手柄止动器机构部、手柄轴部、中间
轴部、凸轮开关组件、钥匙机构部、插销部和主体部所构
制动控制系统是制动设备在司机、列车自动控制系统
ATC 或安全装置等的作用下,产生、传递制动指令,并对
制动力进行计算、分配、协调和控制的部分。
任务一 动车组制动控制系统的维护
任务一 动车组制动控制系统的维护
(一)制动力的控制
任务一 动车组制动控制系统的维护
1. 等制动减速度模式
成。
任务二 检修司机制动控制器
3. 安全装置
为进一步提高动车组的安全性和可控性,防止因计算机
控制系统失灵而危急行车安全,在动车组上通过硬线引入 了紧急制动安全回路。 (二)动车组制动指令的形式 国产动车组制动系统包括了电制动、电空制动和自动式
空气制动几种制动方式。
在动车组中,制动指令的传输多采用数字信号。
任务二 检修司机制动控制器
任务二 检修司机制动控制器
(三)动车组制动指令传输装置
动车组制动设备分散布置于列车各车辆,司机操作台布
置在头车,以上设备之间、司机与设备之间需要交换大量 数据、传输各种信息,因此必须建立某种连接。
任务二 检修司机制动控制器
项目四
动车组制动控制系统的维护与检修
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二节 动车组控制电路的工作原理
五、设备远程控制电路 (供电区分画面 )
19
第二节 动车组控制电路的工作原理
六、受电弓控制电路
受电弓
20
第二节 动车组控制电路的工作原理
六、受电弓控制电路
受电弓设置在T2-4车、M2-6车上,但是受电弓的供 电是从T2-4车或M2-6车一侧的受电弓进行的,即只能单弓 升起。因此当受电弓上升联锁装置继电器(PanIR) 选择 一侧的受电弓时,将不能输入另一侧受电弓的上升指令。
11
第二节 动车组控制电路的工作原理
五、设备远程控制电路
②UR0* ③VCB 84M
①监视器终端装置 85M
MTCOR MTCOR-R
图4.45 主变压器三次侧切断/复位条件
12
第二节 动车组控制电路的工作原理
五、设备远程控制电路
7.CMCOR / CMCOR-R(压缩机电机切断/复位)条件 满足以下条件时,CMCOR / CMCOR-R励磁。 <条件> ①∧② ①监视器终端装置发出的加压指令 ②UR0*励磁
5
第二节 动车组控制电路的工作原理
五、设备远程控制电路
2.PanCOR / PanCOR-R(受电弓切断/复位)条件
满足下面的条件时,PanCOR / PanCOR-R励磁。 <条件> ①∧②
①监视器终端装置发出的加压指令 ②UR0*励磁
②UR0* 80M
PanCOR
①监视器终端装置 81M
PanCOR-R
(紧急接地开关EGS条件),111线(VCB条件)从T2c-8 车 MCRR 接 点 被 加 压 ( DC100v),VCB 辅 助 继 电 器 (VCBRR) 、接地保护开关继电器(EGSR) 各线圈被励磁, 各继电器的接点是关闭的状态。
22
第二节 动车组控制电路的工作原理
高速动车组技术
第四章 动车组控制系统
胡汉春 西南交通大学
第二节 动车组控制电路的工作原理
第二节 动车组控制电路的工作原理
2
第二节 动车组控制电路的工作原理
五、设备远程控制电路
在设置于驾驶台的监视显示器上设定的指令,通过车辆 信息传送线(光纤)传送到各车的监视器终端装置上,由监 视器终端装置对相关的继电器加压。设备远程开放项目如表 4-3所示。
88M/89M/ 90M
71M~74M
M2切断/复位/M1切断 单元选择
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
4
第二节 动车组控制电路的工作原理
五、设备远程控制电路
1.单元选择条件 根据监视器终端装置的加压指令,UR0*(设备命令
继电器)励磁。(*=1~4:单元编号)
①监视器终端装置
UR0*
图4.40 单元选择条件
9
第二节 动车组控制电路的工作原理
五、设备远程控制电路
①监视器终端装置
83M ②UR0* 7A
Re ④VCBCS
③MCR ⑤SVCBCR 7
图4.44 VCB投入条件
VCBCR
10
第二节 动车组控制电路的工作原理
五、设备远程控制电路
6.MTCOR / MTCOR-R(主变压器三次侧切断/复位) 条件 满足以下条件时,MTCOR / MTCOR-R励磁。 <条件> ①∧②∧③ ①监视器终端装置发出的加压指令 ②UR0*励磁 ③VCB处于闭合状态:只在MTCOR一侧
VCBCOR
①监视器终端装置 83M
VCBCOR-R
图4.42 VCB切断/复位条件
7
第二节 动车组控制电路的工作原理
五、设备远程控பைடு நூலகம்电路
4.VCBOR1(受开关或降下受电弓指令控制的VCB断开) 条件
满足以下的条件时,VCBOR1励磁。 <条件>①∨②∨③ ①将VCBOS开关置于ON ②VCBOAR励磁:PanDAR励磁(监视装置发出降下受电弓的指令)
13
第二节 动车组控制电路的工作原理
五、设备远程控制电路
②UR0* 86M ①监视终端装置 87M
CMCOR-R CMCOR
图4.46 压缩机电机切断/复位条件
14
第二节 动车组控制电路的工作原理
五、设备远程控制电路
8.MMCOR / MMCOR-R(牵引电机切断/复位)条件 满足下列条件时,MMCOR / MMCOR-R励磁。 <条件> ①∧② ①监视器终端装置发出的加压指令 (#=88:M2断开,90:M1断开) ②UR0*励磁
①VCBOS
8
102B
②VCBOAR
图4.43 VCB断开条件
8
VCBOR1
第二节 动车组控制电路的工作原理
五、设备远程控制电路
5.VCBCR(受开关或过分相区间控制的VCB投入)条件 满足以下的条件时,VCBCR励磁。
<条件> (①∧②)∨{ ②∧③∧(④∨⑤)} ①监视器终端装置发出的加压指令 ②UR0*励磁 ③MCR励磁 ④将VCBCS开关置于闭合 ⑤SVCBCR励磁:不是过分相区间
受电弓的升降指令能够通过设置在司机台的操作开 关或者监控器的显示器发出。
21
第二节 动车组控制电路的工作原理
六、受电弓控制电路
1.MCR和MCRR的联锁装置 T1c-1车、T2c-8车的主控制器继电器MCR与主控制器
辅助继电器MCRR的联锁关系参照运行指令逻辑部分。 若对T2c-8车MCRR进行了励磁,因此,贯穿线110线
图4.41 受电弓切断/复位条件
6
第二节 动车组控制电路的工作原理
五、设备远程控制电路
3.VCBCOR / VCBCOR-R(受监视器终端装置控制的 VCB切断/复位)条件
满足以下的条件时,VCBCOR / VCBCOR-R励磁。 <条件> ①∧②
①监视器终端装置发出的加压指令 ②UR0*励磁
②UR0* 82M
15
第二节 动车组控制电路的工作原理
五、设备远程控制电路
#M ②UR0* ①监视终端装置
89M
MMCOR MMCOR-R
图4.47 牵引电机切断/复位条件
16
第二节 动车组控制电路的工作原理
五、设备远程控制电路 (远程操作画面 )
17
第二节 动车组控制电路的工作原理
五、设备远程控制电路 (切除状态画面 )
3
第二节 动车组控制电路的工作原理
五、设备远程控制电路
表4-3 设备远程开放项
线号
指令
T1c-1 M2-2 M1-3 T2-4 T1k-5 M2-6 M1s-7 Tc2-8
80M/81M
受电弓下降/上升
82M/83M VCB切断/接通
84M/85M
主变压器三次侧切断/复 位
87M/86M
压缩机切断/复位