Logarithmic singularity of the Szego kernel and a global invariant of strictly pseudoconvex
Twin Peaks

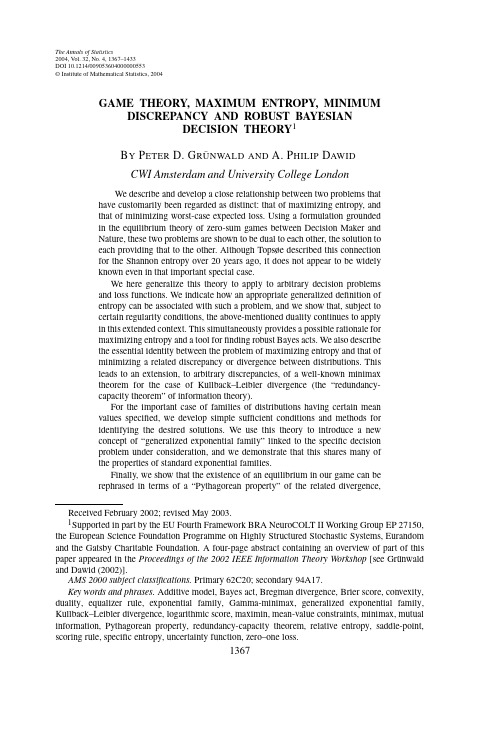
a r X i v :h e p -p h /0008122v 2 23 O c t 2000Twin Peaks aMischa Sall´e ,Jan Smit and Jeroen C.VinkInstitute for Theoretical Physics,University of Amsterdam,Valckenierstraat 65,1018XE Amsterdam,the NetherlandsThe on-shell imaginary part of the retarded selfenergy of massive ϕ4theory in 1+1dimensions is logarithmically infrared divergent.This leads to a zero in the spectral function,separating its usual bump into two.The twin peaks interfere in time-dependent correlation functions,which causes oscillating modulations on top of exponential-like decay,while the usual formulas for the decay rate fail.We see similar modulations in our numerical results for a mean field correlator,using a Hartree ensemble approximation.In our numerical simulations of 1+1dimensional ϕ4theory using the Hartree ensemble approximation 1we found funny modulations in a time-dependent correlation function.Fig.1shows such modulations on top of a roughly ex-ponential decay.The correlation function is the time average of the zero mo-mentum mode of the mean field,F mf (t )=ϕ(t )X (t )= t 2t 1dt ′X (t +t ′)/(t 2−t 1),taken afterwaiting a long time t 1for the system to be in approximate equilibrium.This equilibrium is approximately thermal and F mf (t )is analogous to the sym-metric correlation function of the quantum field theory at finite temperature,F (t )= 12πe −ipt12ρ(p 0),(1)and the latter in turn in terms of the retarded selfenergy Σ(p 0),ρ(p 0)=−2Im Σ(p 0)a Presentedby J.Smit.1mass in the propagators of the diagrams in Fig.2,after adding a counterterm that sets the real part of Σto zero at p 0=m .The one loop diagram is-14-12-10-8-6-4-2100200300400500600l o g (a b s [〈φt ’ φt ’+t 〉−〈φt ’〉〈φt ’+t 〉])tmt’m=31•103...61•103N=64, Lm=14.8-2.63-tm/233N=128, Lm=29.1-4.05-tm/105Figure1:Numerically computed correlation ln |F mf (t )|versus time t in units of the inverse temperature dependent mass m .The coupling is weak,λ/m 2=0.11and the tempera-ture T/m ≈1.4for the smaller volume (with significant deviations from the Bose-Einstein distribution)and ≈1.6for the larger volume (reasonable BE).++. . .123Figure 2:Diagrams leading to thermal damping.present only in the ‘broken phase’(for which ˆϕ =0;there is really only a symmetric phase in 1+1dimensions,but this is due to symmetry restoration by nonperturbative effects which will not obliterate the one-loop damping.)The corresponding selfenergy has been calculated in 2,for example.It only leads todamping for frequencies p 20>4m 2,which are irrelevant for the quasiparticledamping at p 20=m 2.So from now on we concentrate on the two-loop diagram.2After analytic continuation to real time onefinds that it is given by the sum of two terms,Σ1+Σ2(see e.g.3).Thefirst has an imaginary part corresponding to1↔3processes requiring p20>9m2,so it does not contribute to plasmon damping.The second is given byΣ2=−9λ2E1E2E3(1+n1)n2n3−n1(1+n2)(1+n3)m2+(p2+p3)2,E i=m =9λ2e m/T−1 2 ln mindeed an oscillating modulation on top of the roughly exponential decay.The decay corresponding to exp(−γt),withγgiven by(6),is also indicated in the plot:it does not do a good job in describing the average decay beyond thefirst interference minimum.The‘Twin Peaks’phenomenon implies that the usual definition of damping rate(5)is unreliable in1+1dimensions.Acknowledgements.We thank Gert Aarts for useful conversations.This work is supported by FOM/NWO.1.J.C.Vink,these proceedings.2.H.A.Weldon,Phys.Rev.D28,2007(1983).3.E.Wang and U.Heinz,Phys.Rev.D53,899(1996).1512.5107.552.5Figure3:The spectral functionρ(p0)near p0=m=1corresponding to the selfenergy shown in Figs.4,5(T=m,λ=0.4m2).-2-4-6-8-10-12050100150200Figure4:Plot of ln|F(t)|versus mt for T=m,λ=0.4m2.The straight line represents exp(−γt).4。
Toric singularities revisited

Comprehensive surveys from various different perspectives can be found in Danilov [2], Mumford et al. [19], [1] as well as [24, 25]. In [18], Kato extended the theory of toric geometry over a field to an absolute theory, without base. This is achieved by replacing the notion of a toroidal embedding introduced in [19] with the notion of a log structure. A toroidal embedding is a pair (X, U ) consisting of a scheme X locally of finite type and an open subscheme U ⊂ X such that (X, U ) is isomorphic, locally in the e ´ tale topology, to a pair consisting of a toric variety and its algebraic torus. Toroidal embeddings are particularly nice locally Noetherian schemes with distinguished log structures. A log structure on a scheme X , in the sense of Fontaine and Illusie, is a morphism of sheaves of monoids α : MX → OX restricting to an ∗ ∗ isomorphism α−1 (OX )∼ . The theory of log structures on schemes = OX is developed by Kato in [16]. Log structures were developed to give a unified treatment of the various constructions of deRham complexes with logarithmic poles. In [13] Illusie recalls the question that motivated their definition: Let me briefly recall what the main motivating question was. Suppose S is the spectrum of a complete discrete valuation ring A, with closed (resp. generic) point s (resp. η ), and X/S is a scheme with semi-stable reduction, which means that, locally for the e ´ tale topology, X is isomorphic to the closed subscheme of An S defined by the equation x1 · · · xn = t, where x1 , . . . , xn are coordinates on An and t is a uniformizing parameter of A. Then X is regular, Xη is smooth, and Y = Xs is a divisor with normal crossings on X . In this situation, one can consider, with Hyodo, the relative deRham complex of X over S with logarithmic poles along Y , . . ωX/S = ΩX/S (log Y ) ([10] see also [11, 12]). Its restriction to the generic fiber is the usual deRham complex Ω. Xη /η and it induces on Y a complex . . ωY = OY ⊗ ΩX/S (log Y ).
Chapter 4 Exponential and Logarithmic Functions

log100 log10 2
2
ln 1 0
log 0.1 log10 1 1
d. Find ln e-1.
d. Find log366.
ln e1 1ln e 1
2007 Pearson Education Asia
Chapter 4: Exponential and Logarithmic Functions 4.2 Logarithmic Functions
Example 3 – Graph of a Logarithmic Function with b > 1
Chapter 4: Exponential and Logarithmic Functions
Chapter Objectives
• To introduce exponential functions and their applications. • To introduce logarithmic functions and their graphs.
Example 11 – Radioactive Decay
A radioactive element decays such that after t days the number of milligrams present is given by N 100e0.062t . a. How many milligrams are initially present? Solution: For t = 0, N 100e 0.062 0 100 mg.
log 6 1 log 36 6 2 log 6 2
当代大学生推荐阅读书目

“经济学原理”课程推荐阅读书目(2009年10月修订)本书目所列多为知名经济学家撰写,将经济学基本原理用于思考实际问题,且有趣易懂的书籍。
推荐目的在于培养同学对学习和运用经济学的兴趣。
对于作业和考试并无直接帮助,特别适合在休闲时间(例如假期)阅读。
书目基于Mankiw, Principles of Economics (3rd ed.), Suggested Summer Readings。
并补充了中译本,增补了一些书籍。
排列顺序大致与教材内容平行。
内容相近甚或作者相同的书籍集中排列,节约时间者可择其一阅读。
Freakonomics: A Rogue Economist Explores the Hidden Side of Everything, by Steven D. Levitt, and Stephen J. Dubner, William Morrow, 2005.《魔鬼经济学》/(美)史蒂芬·列维特、史蒂芬·都伯纳著,刘祥亚译,广东经济出版社2006。
Philosophy of Science: A Very Short Introduction, Oxford University Press, 200.《科学哲学》/(英)Samir Okasha著,韩广忠译,凤凰出版传媒集团、译林出版社2009。
The Fatal Equilibrium, by Marshall Jevons, MIT Press, 1985.《致命的均衡》/(美)马歇尔·杰文斯著;罗全喜、叶凯译,机械工业出版社,2005。
Murder at the Margin, by Marshall Jevons, Princeton University, 1993.《边际谋杀》/(美)马歇尔·杰文斯著;王红夏译,机械工业出版社,2006。
A Deadly Indifference: A Henry Spearman Mystery, by Marshall Jevons, Carroll & Graf, 1995. 《夺命的冷漠》/(美)马歇尔·杰文斯著;石北燕、赵保国译,机械工业出版社,2008。
Game theory, maximum entropy, minimum discrepancy, and robust Bayesian decision theory
The Annals of Statistics2004,Vol.32,No.4,1367–1433DOI10.1214/009053604000000553©Institute of Mathematical Statistics,2004GAME THEORY,MAXIMUM ENTROPY,MINIMUMDISCREPANCY AND ROBUST BAYESIANDECISION THEORY1B Y P ETER D.G RÜNWALD AND A.P HILIP D AWIDCWI Amsterdam and University College LondonWe describe and develop a close relationship between two problems that have customarily been regarded as distinct:that of maximizing entropy,andthat of minimizing worst-case expected ing a formulation groundedin the equilibrium theory of zero-sum games between Decision Maker andNature,these two problems are shown to be dual to each other,the solution toeach providing that to the other.Although Topsøe described this connectionfor the Shannon entropy over20years ago,it does not appear to be widelyknown even in that important special case.We here generalize this theory to apply to arbitrary decision problems and loss functions.We indicate how an appropriate generalized definition ofentropy can be associated with such a problem,and we show that,subject tocertain regularity conditions,the above-mentioned duality continues to applyin this extended context.This simultaneously provides a possible rationale formaximizing entropy and a tool forfinding robust Bayes acts.We also describethe essential identity between the problem of maximizing entropy and that ofminimizing a related discrepancy or divergence between distributions.Thisleads to an extension,to arbitrary discrepancies,of a well-known minimaxtheorem for the case of Kullback–Leibler divergence(the“redundancy-capacity theorem”of information theory).For the important case of families of distributions having certain mean values specified,we develop simple sufficient conditions and methods foridentifying the desired solutions.We use this theory to introduce a newconcept of“generalized exponential family”linked to the specific decisionproblem under consideration,and we demonstrate that this shares many ofthe properties of standard exponential families.Finally,we show that the existence of an equilibrium in our game can be rephrased in terms of a“Pythagorean property”of the related divergence, Received February2002;revised May2003.1Supported in part by the EU Fourth Framework BRA NeuroCOLT II Working Group EP27150, the European Science Foundation Programme on Highly Structured Stochastic Systems,Eurandom and the Gatsby Charitable Foundation.A four-page abstract containing an overview of part of this paper appeared in the Proceedings of the2002IEEE Information Theory Workshop[see Grünwald and Dawid(2002)].AMS2000subject classifications.Primary62C20;secondary94A17.Key words and phrases.Additive model,Bayes act,Bregman divergence,Brier score,convexity, duality,equalizer rule,exponential family,Gamma-minimax,generalized exponential family, Kullback–Leibler divergence,logarithmic score,maximin,mean-value constraints,minimax,mutual information,Pythagorean property,redundancy-capacity theorem,relative entropy,saddle-point, scoring rule,specific entropy,uncertainty function,zero–one loss.13671368P.D.GRÜNWALD AND A.P.DAWIDthus generalizing previously announced results for Kullback–Leibler andBregman divergences.1.Introduction.Suppose that,for purposes of inductive inference or choos-ing an optimal decision,we wish to select a single distribution P∗to act as rep-resentative of a class of such distributions.The maximum entropy principle [Jaynes(1989),Csiszár(1991)and Kapur and Kesavan(1992)]is widely ap-plied for this purpose,but its rationale has often been controversial[see,e.g., van Fraassen(1981),Shimony(1985),Skyrms(1985),Jaynes(1985),Seidenfeld (1986)and Uffink(1995,1996)].Here we emphasize and generalize a reinterpreta-tion of the maximum entropy principle[Topsøe(1979),Walley(1991),Chapter5, Section12,and Grünwald(1998)]:that the distribution P∗that maximizes the en-tropy over also minimizes the worst-case expected logarithmic score(log loss). In the terminology of decision theory[Berger(1985)],P∗is a robust Bayes,or -minimax,act,when loss is measured by the logarithmic score.This gives a decision-theoretic interpretation of maximum entropy.In this paper we extend this result to apply to a generalized concept of entropy, tailored to whatever loss function L is regarded as appropriate,not just logarithmic score.We show that,under regularity conditions,maximizing this generalized entropy constitutes the major step towardfinding the robust Bayes(“ -minimax”) act against with respect to L.For the important special case that is described by mean-value constraints,we give theorems that in many cases allow us to find the maximum generalized entropy distribution explicitly.We further define generalized exponential families of distributions,which,for the case of the logarithmic score,reduce to the usual exponential families.We extend generalized entropy to generalized relative entropy and show how this is essentially the same as a general decision-theoretic definition of discrepancy.We show that the family of divergences between probability measures known as Bregman divergences constitutes a special case of such discrepancies.A discrepancy can also be used as a loss function in its own right:we show that a minimax result for relative entropy[Haussler(1997)]can be extended to this more general case.We further show that a“Pythagorean property”[Csiszár(1991)]known to hold for relative entropy and for Bregman divergences in fact applies much more generally;and we give a precise characterization of those discrepancies for which it holds.Our analysis is game-theoretic,a crucial concern being the existence and properties of a saddle-point,and its associated minimax and maximin acts,in a suitable zero-sum game between Decision Maker and Nature.1.1.A word of caution.It is not our purpose either to advocate or to criticize the maximum entropy or robust Bayes approach:we adopt a philosophically neutral stance.Rather,our aim is mathematical unification.By generalizing the concept of entropy beyond the standard Shannon framework,we obtain a varietyMAXIMUM ENTROPY AND ROBUST BAYES 1369of interesting characterizations of maximum generalized entropy and display its connections with other known concepts and results.The connection with -minimax might be viewed,by those who already regard robust Bayes as a well-founded principle,as a justification for maximizing entropy—but it should be noted that -minimax,like all minimax approaches,is not without problems of its own [Berger (1985)].We must also point out that some of the more problematic aspects of maximum entropy inference,such as the incompatibility of maximum entropy with Bayesian updating [Seidenfeld (1986)and Uffink (1996)],carry over to our generalized setting:in the words of one referee,rather than resolving this problem,we “spread it to a new level of abstraction and generality.”Although these dangers must be firmly held in mind when considering the implications of this work for inductive inference,they do not undermine the mathematical connections established.2.Overview.We start with an overview of our results.For ease of exposition,we make several simplifying assumptions,such as a finite sample space,in this section.These assumptions will later be relaxed.2.1.Maximum entropy and game theory.Let X be a finite sample space,and let be a family of distributions over X .Consider a Decision Maker (DM)who has to make a decision whose consequences will depend on the outcome of a random variable X defined on X .DM is willing to assume that X is distributed according to some P ∈ ,a known family of distributions over X ,but he or she does not know which such distribution applies.DM would like to pick a single P ∗∈ to base decisions on.One way of selecting such a P ∗is to apply the maximum entropy principle [Jaynes (1989)],which advises DM to pick that distribution P ∗∈ maximizing H (P )over all P ∈ .Here H (P )denotes the Shannon entropy of P ,H (P ):=− x ∈X p(x)log p(x)=E P {−log p(X)},where p is the probability mass function of P .However,the various rationales offered in support of this advice have often been unclear or disputed.Here we shall present a game-theoretic rationale,which some may find attractive.Let A be the set of all probability mass functions defined over X .By the information inequality [Cover and Thomas (1991)],we have that,for any distribution P ,inf q ∈A E P {−log q(X)}is achieved uniquely at q =p ,where it takes the value H (P ).That is,H (P )=inf q ∈A E P {−log q(X)},and so the maximum entropy can be written assup P ∈ H (P )=sup P ∈ inf q ∈AE P {−log q(X)}.(1)Now consider the “log loss game”[Good (1952)],in which DM has to specify some q ∈A ,and DM’s ensuing loss if Nature then reveals X =x is measured by −log q(x).Alternatively,we can consider the “code-length game”[Topsøe (1979)and Harremoës and Topsøe (2001)],wherein we require DM to specify1370P.D.GRÜNWALD AND A.P.DAWIDa prefix-free codeσ,mapping X into a suitable set offinite binary strings,and to measure his or her loss when X=x by the lengthκ(x)of the codewordσ(x). Thus DM’s objective is to minimize expected code-length.Basic results of coding theory[see,e.g.,Dawid(1992)]imply that we can associate withσa probability mass function q having q(x)=2−κ(x).Then,up to a constant,−log q(x)becomes identical with the code-lengthκ(x),so that the log loss game is essentially equivalent to the code-length game.By analogy with minimax results of game theory,one might conjecture thatsup P∈ infq∈AE P{−log q(X)}=infq∈AsupP∈E P{−log q(X)}.(2)As we have seen,P achieving the supremum on the left-hand side of(2)is a maximum entropy distribution in .However,just as important,q achieving the infimum on the right-hand side of(2)is a robust Bayes act against ,or a -minimax act[Berger(1985)],for the log loss decision problem.Now it turns out that,when is closed and convex,(2)does indeed hold under very general conditions.Moreover the infimum on the right-hand side is achieved uniquely for q=p∗,the probability mass function of the maximum entropy distribution P∗.Thus,in this game between DM and Nature,the maximum entropy distribution P∗may be viewed,simultaneously,as defining both Nature’s maximin and—in our view more interesting—DM’s minimax strategy.In other words, maximum entropy is robust Bayes.This decision-theoretic reinterpretation might now be regarded as a plausible justification for selecting the maximum entropy distribution.Note particularly that we do not restrict the acts q available to DM to those corresponding to a distribution in the restricted set :that the optimal act p∗does indeed turn out to have this property is a consequence of,not a restriction on, the analysis.The maximum entropy method has been most commonly applied in the setting where is described by mean-value constraints[Jaynes(1989)and Csiszár (1991)]: ={P:E P(T)=τ},where T=t(X)∈R k is some given real-or vector-valued statistic.As pointed out by Grünwald(1998),for such constraints the property(2)is particularly easy to show.By the general theory of exponential families[Barndorff-Nielsen(1978)],under some mild conditions onτthere will exist a distribution P∗satisfying the constraint E P∗(T)=τand having probability mass function of the form p∗(x)=exp{α0+αT t(x)}for someα∈R k,α0∈R. Then,for any P∈ ,E P{−log p∗(X)}=−α0−αT E P(T)=−α0−αTτ=H(P∗).(3)We thus see that p∗is an“equalizer rule”against ,having the same expected loss under any P∈ .To see that P∗maximizes entropy,observe that,for any P∈ ,H(P)=infq∈A E P{−log q(X)}≤E P{−log p∗(X)}=H(P∗),(4)by(3).MAXIMUM ENTROPY AND ROBUST BAYES1371 To see that p∗is robust Bayes and that(2)holds,note that,for any q∈A,sup P∈ E P{−log q(X)}≥E P∗{−log q(X)}≥E P∗{−log p∗(X)}=H(P∗),(5)where the second inequality is the information inequality[Cover and Thomas (1991)].HenceH(P∗)≤infq∈A supP∈E P{−log q(X)}.(6)However,it follows trivially from the“equalizer”property(3)of p∗thatsup P∈ E P{−log p∗(X)}=H(P∗).(7)From(6)and(7),we see that the choice q=p∗achieves the infimum on the right-hand side of(2)and is thus robust Bayes.Moreover,(2)holds,with both sides equal to H(P∗).The above argument can be extended to much more general sample spaces(see Section7).Although this game-theoretic approach and result date back at least to Topsøe(1979),they seem to have attracted little attention so far.2.2.This work:generalized entropy.The above robust Bayes view of maxi-mum entropy might be regarded as justifying its use in those decision problems, such as discrete coding and Kelly gambling[Cover and Thomas(1991)],where the log loss is clearly an appropriate loss function to use.But what if we are interested in other loss functions?This is the principal question we address in this paper.2.2.1.Generalized entropy and robust Bayes acts.Wefirst recall,in Section3,a natural generalization of the concept of“entropy”(or“uncertainty inherent in a distribution”),related to a specific decision problem and loss function facing DM. The generalized entropy thus associated with the log loss problem is just the Shannon entropy.More generally,let A be some space of actions or decisions and let X be the(not necessarilyfinite)space of possible outcomes to be observed.Let the loss function be given by L:X×A→(−∞,∞],and let be a convex set of distributions over X.In Sections4–6we set up a statistical game G based on these ingredients and use this to show that,under a variety of broad regularity conditions, the distribution P∗maximizing,over ,the generalized entropy associated with the loss function L has a Bayes act a∗∈A[achieving inf a∈A L(P∗,a)]that is a robust Bayes( -minimax)decision relative to L—thus generalizing the result for the log loss described in Section2.1.Some variations on this result are also given.2.2.2.Generalized exponential families.In Section7we consider in detail the case of mean-value constraints,of the form ={P:E P(T)=τ}.Forfixed loss function L and statistic T,asτvaries we obtain a family of maximum generalized entropy distributions,one for each value ofτ.For Shannon entropy,this turns out1372P.D.GRÜNWALD AND A.P.DAWIDto coincide with the exponential family having natural sufficient statistic T[Csiszár (1975)].In close analogy we define the collection of maximum generalized entropy distributions,as we varyτ,to be the generalized exponential family determined by L and T,and we give several examples of such generalized exponential families. In particular,Lafferty’s“additive models based on Bregman divergences”[Lafferty (1999)]are special cases of our generalized exponential families(Section8.4.2).2.2.3.Generalized relative entropy and discrepancy.In Section8we describe how generalized entropy extends to generalized relative entropy and show how this in turn is intimately related to a discrepancy or divergence function.Maximum generalized relative entropy then becomes a special case of the minimum discrepancy method.For the log loss,the associated discrepancy function is just the familiar Kullback–Leibler divergence,and the method then coincides with the “classical”minimum relative entropy method[Jaynes(1989);note that,for Jaynes,“relative entropy”is the same as Kullback–Leibler divergence;for us it is the negative of this].2.2.4.A generalized redundancy-capacity theorem.In many statistical deci-sion problems it is more natural to seek minimax decisions with respect to the discrepancy associated with a loss,rather than with respect to the loss directly. With any game we thus associate a new“derived game,”in which the discrepancy constructed from the loss function of the original game now serves as a new loss function.In Section9we show that our minimax theorems apply to games of this form too:broadly,whenever the conditions for such a theorem hold for the original game,they also hold for the derived game.As a special case,we reprove a minimax theorem for the Kullback–Leibler divergence[Haussler(1997)],known in infor-mation theory as the redundancy-capacity theorem[Merhav and Feder(1995)].2.2.5.The Pythagorean property.The Kullback–Leibler divergence has a celebrated property reminiscent of squared Euclidean distance:it satisfies an analogue of the Pythagorean theorem[Csiszár(1975)].It has been noted[Csiszár (1991),Jones and Byrne(1990)and Lafferty(1999)]that a version of this property is shared by the broader class of Bregman divergences.In Section10we show that a“Pythagorean inequality”in fact holds for the discrepancy based on an arbitrary loss function L,so long as the game G has a value;that is,an analogue of(2)holds.Such decision-based discrepancies include Bregman divergences as special cases.We demonstrate that,even for the case of mean-value constraints, the Pythagorean inequality for a Bregman divergence may be strict.2.2.6.Finally,Section11takes stock of what has been achieved and presents some suggestions for further development.MAXIMUM ENTROPY AND ROBUST BAYES13733.Decision problems.In this section we set out some general definitions and properties we shall require.For more background on the concepts discussed here, see Dawid(1998).A DM has to take some action a selected from a given action space A,after which Nature will reveal the value x∈X of a quantity X,and DM will then suffer a loss L(x,a)in(−∞,∞].We suppose that Nature takes no account of the action chosen by DM.Then this can be considered as a zero-sum game between Nature and DM,with both players moving simultaneously,and DM paying Nature L(x,a)after both moves are revealed.We call such a combination G:=(X,A,L) a basic game.Both DM and Nature are also allowed to make randomized moves,such a move being described by a probability distribution P over X(for Nature)orζover A (for DM).We assume that suitableσ-fields,containing all singleton sets,have been specified in X and A,and that any probability distributions considered are defined over the relevantσ-field;we denote the family of all such probability distributions on X by P0.We further suppose that the loss function L is jointly measurable.3.1.Expected loss.We shall permit algebraic operations on the extended real line[−∞,∞],with definitions and exceptions as in Rockafellar(1970),Section4. For a function f:X→[−∞,∞],and P∈P0,we may denote E P{f(X)} [i.e.,E X∼P{f(X)}]by f(P).When f is bounded below,f(P)is construedas∞if P{f(X)=∞}>0.When f is unbounded,we interpret f(P)as f+(P)−f−(P)∈[−∞,+∞],where f+(x):=max{f(x),0}and f−(x):= max{−f(x),0},allowing either f+(P)or f−(P)to take the value∞,but not both.In this last case f(P)is undefined,else it is defined(either as afinite number or as±∞).If DM knows that Nature is generating X from P or,in the absence of such knowledge,DM is using P to represent his or her own uncertainty about X, then the undesirability to DM of any act a∈A will be assessed by means of its expected loss,(8)L(P,a):=E P{L(X,a)}.We can similarly extend L to randomized acts:L(x,ζ):=E A∼ζ{L(x,A)}, L(P,ζ)=E(X,A)∼P×ζ{L(X,A)}.Throughout this paper we shall mostly confine attention to probability measures P∈P0such that L(P,a)is defined for all a∈A,and we shall denote the family of all such P by P.We further confine attention to randomized actsζsuch that L(P,ζ)is defined for all P∈P,denoting the set of all suchζby Z.Note that any distribution degenerate at a point x∈X is in P,and so L(x,ζ)is defined for all x∈X,ζ∈Z.L EMMA3.1.For all P∈P,ζ∈Z,(9)L(P,ζ)=E X∼P{L(X,ζ)}=E A∼ζ{L(P,A)}.1374P.D.GRÜNWALD AND A.P.DAWIDP ROOF.When L(P,ζ)isfinite this is just Fubini’s theorem.Now consider the case L(P,ζ)=∞.First suppose L≥0everywhere. If L(x,ζ)=∞for x in a subset of X having positive P-measure,then(9) holds,both sides being+∞.Otherwise,L(x,ζ)isfinite almost surely[P]. If E P{L(X,ζ)}werefinite,then by Fubini it would be the same as L(P,ζ). So once again E P{L(X,ζ)}=L(P,ζ)=+∞.This result now extends easily to possibly negative L,on noting that L−(P,ζ) must befinite;a parallel result holds when L(P,ζ)=−∞.Finally the whole argument can be repeated after interchanging the roles of x and a and of P andζ.C OROLLARY3.1.For any P∈P,inf ζ∈Z L(P,ζ)=infa∈AL(P,a).(10)P ROOF.Clearly infζ∈Z L(P,ζ)≤inf a∈A L(P,a).If inf a∈A L(P,a)=−∞we are done.Otherwise,for anyζ∈Z,L(P,ζ)=E A∼ζL(P,A)≥inf a∈A L(P,a).We shall need the fact that,for anyζ∈Z,L(P,ζ)is linear in P in the following sense.L EMMA3.2.Let P0,P1∈P,and let Pλ:=(1−λ)P0+λP1.Fixζ∈Z,such that the pair{L(P0,ζ),L(P1,ζ)}does not contain both the values−∞and+∞. Then,for anyλ∈(0,1),L(Pλ,ζ)isfinite if and only if both L(P1,ζ)and L(P0,ζ) are.In this case L(Pλ,ζ)=(1−λ)L(P0,ζ)+λL(P1,ζ).P ROOF.Consider a bivariate random variable(I,X)with joint distribution P∗over{0,1}×X specified by the following:I=1,0with respective probabilitiesλ, 1−λ;and,given I=i,X has distribution P i.By Fubini we haveE P∗{L(X,ζ)}=E P∗[E P∗{L(X,ζ)|I}],in the sense that,whenever one side of this equation is defined andfinite,the same holds for the other,and they are equal.Noting that,under P∗,the distribution of X is Pλmarginally,and P i conditional on I=i(i=0,1),the result follows. 3.2.Bayes act.Intuitively,when X∼P an act a P∈A will be optimal if it minimizes L(P,a)over all a∈A.Any such act a P is a Bayes act against P.More generally,to allow for the possibility that L(P,a)may be infinite as well as to take into account randomization,we callζP∈Z a(randomized)Bayes act,or simply Bayes,against P(not necessarily in P)ifE P{L(X,ζ)−L(X,ζP)}∈[0,∞](11)MAXIMUM ENTROPY AND ROBUST BAYES1375 for allζ∈Z.We denote by A P(resp.Z P)the set of all nonrandomized(resp. randomized)Bayes acts against P.Clearly A P⊆Z P,and L(P,ζP)is the samefor allζP∈Z P.The loss function L will be called -strict if,for each P∈ ,there exists a P∈A that is the unique Bayes act against P;L is -semistrict if,for each P∈ ,A P is nonempty,and a,a ∈A P⇒L(·,a)≡L(·,a ).When L is -strict,and P∈ ,it can never be optimal for DM to choose a randomized act; when L is -semistrict,even though a randomized act can be optimal there is never any point in choosing one,since its loss function will be identical with that of any nonrandomized optimal act.Semistrictness is clearly weaker than strictness.For our purposes we can replace it by the still weaker concept of relative strictness:L is -relatively strict if for all P∈ the set of Bayes acts A P is nonempty and,for all a,a ∈A P, L(P ,a)=L(P ,a )for all P ∈ .3.3.Bayes loss and entropy.Whether or not a Bayes act exists,the Bayes loss H(P)∈[−∞,∞]of a distribution P∈P is defined byH(P):=infa∈A L(P,a).(12)It follows from Corollary3.1that it would make no difference if the infimum in(12)were extended to be overζ∈Z.We shall mostly be interested in Bayes acts of distributions P withfinite H(P).In the context of Section2.1,with L(x,q)the log loss−log q(x),H(P)is just the Shannon entropy of P.P ROPOSITION 3.1.Let P∈P and suppose H(P)isfinite.Then the following hold:(i)ζP∈Z is Bayes against P if and only ifE P{L(X,a)−L(X,ζP)}∈[0,∞](13)for all a∈A.(ii)ζP is Bayes against P if and only if L(P,ζP)=H(P).(iii)If P admits some randomized Bayes act,then P also admits some nonrandomized Bayes act;that is,A P is not empty.P ROOF.Items(i)and(ii)follow easily from(10)andfiniteness.To prove(iii),let f(P,a):=L(P,a)−H(P).Then f(P,a)≥0for all a,while E A∼ζP f(P,A)=L(P,ζP)−H(P)=0.We deduce that{a∈A:f(P,a)=0}has probabil-ity1underζP and so,in particular,must be nonempty.We express the well-known concavity property of the Bayes loss[DeGroot (1970),Section8.4]as follows.1376P.D.GRÜNWALD AND A.P.DAWIDP ROPOSITION3.2.Let P0,P1∈P,and let Pλ:=(1−λ)P0+λP1.Suppose that H(P i)<∞for i=0,1.Then H(Pλ)is a concave function ofλon[0,1](and thus,in particular,continuous on(0,1)and lower semicontinuous on[0,1]).It is either bounded above on[0,1]or infinite everywhere on(0,1).P ROOF.Let B be the set of all a∈A such that L(Pλ,a)<∞for someλ∈(0,1)—and thus,by Lemma3.2,for allλ∈[0,1].If B is empty, then H(Pλ)=∞for allλ∈(0,1);in particular,H(Pλ)is then concave on[0,1]. Otherwise,taking anyfixed a∈B we have H(Pλ)≤L(Pλ,a)≤max i L(P i,a), so H(Pλ)is bounded above on[0,1].Moreover,as the pointwise infimum of the nonempty family of concave functions{L(Pλ,a):a∈A},H(Pλ)is itself a concave function ofλon[0,1].C OROLLARY3.2.If for all a∈A,L(Pλ,a)<∞for someλ∈(0,1),then for allλ∈[0,1],H(Pλ)=lim{H(Pµ):µ∈[0,1],µ→λ}[it being allowed that H(Pλ)is notfinite].P ROOF.In this case B=A,so that H(Pλ)=inf a∈B L(Pλ,a).Each func-tion L(Pλ,a)isfinite and linear,hence a closed concave function ofλon[0,1]. This last property is then preserved on taking the infimum.The result now follows from Theorem7.5of Rockafellar(1970).C OROLLARY3.3.If in addition H(P i)isfinite for i=0,1,then H(Pλ)is a bounded continuous function ofλon[0,1].Note that Corollary3.3will always apply when the loss function is bounded.Under some further regularity conditions[see Dawid(1998,2003)and Section3.5.4below],a general concave function over P can be regarded as generated from some decision problem by means of(12).Concave functions have been previously proposed as general measures of the uncertainty or diversity in a distribution[DeGroot(1962)and Rao(1982)],generalizing the Shannon entropy. We shall thus call the Bayes loss H,as given by(12),the(generalized)entropy function or uncertainty function associated with the loss function L.3.4.Scoring rule.Suppose the action space A is itself a set Q of distributions for X.Note we are not here considering Q∈Q as a randomized act over X,but rather as a simple act in its own right(e.g.,a decision to quote Q as a description of uncertainty about X).We typically write the loss as S(x,Q)in this case and refer to S as a scoring rule or score.Such scoring rules are used to assess the performance of probability forecasters[Dawid(1986)].We say S is -proper if ⊆Q⊆P and,for all P∈ ,the choice Q=P is Bayes against X∼P. Then for P∈ ,(14)H(P)=S(P,P).Suppose now we start from a general decision problem,with loss function L such that Z Q is nonempty for all Q∈Q.Then we can define a scoring rule byS(x,Q):=L(x,ζQ),(15)where for each Q∈Q we suppose we have selected some specific Bayes actζQ∈Z Q.Then for P∈Q,S(P,Q)=L(P,ζQ)is clearly minimized when Q=P,so that this scoring rule is Q-proper.If L is Q-semistrict,then(15) does not depend on the choice of Bayes actζQ.More generally,if L is Q-relatively strict,then S(P,Q)does not depend on such a choice,for all P,Q∈Q.We see that,for P∈Q,inf Q∈Q S(P,Q)=S(P,P)=L(P,ζP)=H(P). In particular,the generalized entropy associated with the constructed scoring rule(15)is identical with that determined by the original loss function L.In this way,almost any decision problem can be reformulated in terms of a proper scoring rule.3.5.Some examples.We now give some simple examples,both to illustrate the above concepts and to provide a concrete focus for later development.Further examples may be found in Dawid(1998)and Dawid and Sebastiani(1999).3.5.1.Brier score.Although it can be generalized,we restrict our treatment of the Brier score[Brier(1950)]to the case of afinite sample space X= {x1,...,x N}.A distribution P over X can be represented by its probability vector p=(p(1),...,p(N)),where p(x):=P(X=x).A point x∈X may also be represented by the N-vectorδx corresponding to the point-mass distribution on{x} having entriesδx(j)=1if j=x,0otherwise.The Brier scoring rule is then defined byS(x,Q):= δx−q 2(16)=Nj=1{δx(j)−q(j)}2=j q(j)2−2q(x)+1.(17)ThenS(P,Q)=j q(j)2−2jp(j)q(j)+1,(18)which is uniquely minimized for Q=P,so that this is a P-strict proper scoring rule.The corresponding entropy function is(see Figure1)H(P)=1−j p(j)2.(19)。
大学体验英语视听说教程(第三册)-2.
3. People don’t differ in behavior as they differ in skin pigments. Extroverts, introverts, optimists, pessimists, criminals, liberals, etc. are found in all societies and cultures. Even identical twins (with 100% similar genes) and fraternal twins (with 50% similar genes) behave differently in most of the cases.
Answer: Is it nature or is it nurture?
2. According to the passage, what’s the definition of genius?
Answer: Geniuses are those who have the intelligence, enthusiasm and endurance to acquire the needed expertise in a broadly valued domain of achievement and who then make contributions to that field that are considered by peers to be original.
Mysteries of the Universe
The mysteries of the universe are vast and awe-inspiring, encompassing everything from the nature of dark matter and dark energy to the origins of the cosmos and the possibility of extraterrestrial life. Some of the most intriguing mysteries include:1.Dark Matter and Dark Energy: These are two of the most enigmaticcomponents of the universe, comprising the majority of its mass and energy. Yet, their true nature and properties remain largely elusive, challenging our understanding of the fundamental forces at play in the universe.2.The Big Bang: The origin of the universe itself is a profoundmystery, with the Big Bang theory providing a framework forunderstanding the rapid expansion of space and the subsequentevolution of galaxies, stars, and planets. However, manyquestions remain about what preceded the Big Bang and what lies beyond the observable universe.3.Black Holes: These enigmatic cosmic phenomena have captivatedscientists and the public alike, as their extreme gravitational pull and mysterious interiors defy our current understanding of physics. The nature of the singularity at the heart of a black hole and the potential links to other cosmic mysteries aresubjects of ongoing research.4.Exoplanets and the Search for Life: The discovery of thousandsof exoplanets beyond our solar system has fueled speculationabout the potential for life elsewhere in the universe.Understanding the conditions necessary for life to exist and the likelihood of finding extraterrestrial civilizations are among the most tantalizing mysteries in astronomy.5.Quantum Mechanics and Gravity: The quest to reconcile theprinciples of quantum mechanics with the force of gravityrepresents a major frontier in theoretical physics, withprofound implications for understanding the behavior of matter at the smallest and largest scales.These mysteries, among many others, continue to inspire scientists and philosophers to push the boundaries of human knowledge and imagination, offering a glimpse into the profound complexities of the cosmos.。
Logarithmic
Logarithmic transform coefficient histogram matching with spatialequalizationBlair Silver◊, Sos Agaian*, and Karen Panetta◊◊ Department of Electrical and Computer Engineering, Tufts University161 College Avenue, Medford, MA 02155* College of Engineering, The University of Texas at San Antonio6900 North Loop 1604 West, San Antonio, TX 78249-0669ABSTRACTIn this paper we propose an image enhancement algorithm that is based on utilizing histogram data gathered from transform domain coefficients that will improve on the limitations of the histogram equalization method. Traditionally, classical histogram equalization has had some problems due to its inherent dynamic range expansion. Many images with data tightly clustered around certain intensity values can be over enhanced by standard histogram equalization, leading to artifacts and overall tonal change of the image. In the transform domain, one has control over subtle image properties such as low and high frequency content with their respective magnitudes and phases. However, due to the nature of many of these transforms, the coefficient’s histograms may be so tightly packed that distinguishing them from one another may be impossible. By placing the transform coefficients in the logarithmic transform domain, it is easy to see the difference between different quality levels of images based upon their logarithmic transform coefficient histograms. Our results demonstrate that combing the spatial method of histogram equalization with logarithmic transform domain coefficient histograms achieves a much more balanced enhancement, that out performs classical histogram equalization.Keywords: Image enhancement, transform coefficient histogram, histogram equalization, histogram matching.1.INTRODUCTIONImage enhancement techniques strive for one major purpose: to improve some characteristic of an image. These enhancement techniques can be broken up into two major classifications: spatial domain enhancement and transform domain enhancement.Spatial domain techniques deal with the raw image data, altering the intensity values based on a specific algorithm’s set of criteria. These techniques can range from local filtering to global algorithms. A common example of a spatial technique is histogram equalization, which attempts to alter the spatial histogram of an image to closely match a uniform distribution. Histogram equalization treats the image globally and because of this suffers from being poorly suited for retaining local detail. It is also common that the equalization will over enhance the image, resulting in an undesired loss of visual data, of quality, and of intensity scale [6].Transform domain enhancement techniques involve transforming the image intensity data into a specific domain by using such methods as the DCT, Fourier, and Hartley transforms [2,7-9,11].These transforms are used to alter the frequency content of an image to improve desired traits, such as high frequency content. Many enhancement techniques have been proposed that attempt to enhance the image based upon other transform domains and their characteristics [2,7-9,11].Each of these methods has its strong points and its weak points. This leads to the question: is there a way to combine these styles of enhancement to return even better results? This paper will explore a new method for which a transformdomain based technique and a spatial technique can be combined to enhance images. The proposed algorithm will address visualizing and altering the transform coefficient histograms through histogram mapping and histogram equalization using the Discrete Cosine Transform (DCT). This paper will also demonstrate a quantitative measurement based upon contrast entropy to determine the efficacy and the optimization of the method.The paper is organized as follows: Section I lays out the difference between spatial and transform domain enhancement and briefly states the proposed algorithm. Section II defines the measure of algorithm performance, choosing optimal parameters, the logarithmic transform domain, and histogram equalization. Section III has an explanation of the logarithmic transform domain histogram matching with histogram equalization algorithm (LTHMHE) as well as an explanation of LTHMHE combined with alpha-rooting, and section IV is an analysis of the experimental results using this method. Section V is a discussion of the results and some concluding comments are made.2. BACKGROUNDIn this section, background topics necessary to understand the new method proposed are discussed. The measure of performance will be explored first followed by a method for choosing optimal parameters, a definition of the logarithmic transform domain, a definition of histogram equalization, and a definition of alpha-rooting.2.1 Measure of performanceMeasuring the performance of a given enhancement algorithm is a key step into understanding how effective a given method is. However, defining a proper measure of enhancement has proven to be a difficult task. It is important when implementing an image enhancement technique to create a suitable image enhancement measure, however the improvement resulting from the enhancement is often difficult to measure. This problem become more apparent when the enhancement algorithms are parameter based and one needs: a) to choose the best parameters; b) to choose the best transform among a class of unitary transforms; c) to automate the image enhancement procedures. The problem becomes especially difficult when an image enhancement procedure is used as a preprocessing step for other image processing purposes such as object detection, classification, and recognition. For this reason it becomes apparent that a measure must be designed based on a specific trait of the image.In the past, there have been many differing definitions of an adequate measure of performance based on contrast[1,3,4,11]. Gordon and Rangayan used local contrast defined by the mean gray values centered on a current pixel of two rectangular windows [4]. Begchladi and Negrate defined an improved version of the aforementioned measure by basing their method on local edge information of the image [1]. In the past, attempts at statistical measures of gray level distribution of local contrast enhancement (for example mean, variance, or entropy) have not been particularly useful or meaningful. A number of images, which show an obvious contrast improvement, showed no consistency, as a class, when using these statistical measurements. Morrow introduced a measure based on the contrast histogram, which has a much greater consistency than statistical measures [11].For simple patterns, two definitions of contrast measure have also been often used. One is the Michelson contrast measure ; the other is the Weber contrast measure. The Michelson contrast measure is used to measure the contrast of a periodic pattern such as a sinusoidal grating, while the Weber contrast measure assumes a large uniform luminance background with a small test target. Both measures are therefore unsuitable for measuring the contrast in complex images [10]. Many such modifications of the Weber contrast have been proposed [7-9]. Note that Fechner’s law gives a relationship between brightness and light intensity which is given by the following equation.)ln()ln(minmax max f f k f f k B ′+′= (1)Where k’ is a constant, and fmax and fmin are the maximum and minimum luminance values in a block of the image. Fechner’s law provides the basis for the contrast measure based on contrast entropy which was proposed and later modified by Agaian. [8,9].Definition [9]: Let an image I be split into 12k k × blocks (,)B k l with center (k,l) of size 12M M ×.An image enhancement or contrast measure with respect to transform Φ{{⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧ΦΦ=Φ),(),(min max ;min;,max;,,par I par I AWC w l k w l k l k parameters (2)Where Φ is a given transform from class of fast unitary transforms (including wavelets), and max;,w k l I , min;,w k l I are themaximum and minimum luminance values in a block (,)B k l of the image and where the parameters are the processing enhancement algorithm parameters.Definition [8]: Modified image enhancement measure∑∑==ΦΦ=Φ212111;min;,max;21,,),(),(log 201)(k l k k w l k w l k k k par I par I k k EME α (3) 12,,()k k EME αΦ is called a measure of image enhancement or contrast measure with respect to transform Φ.Therefore, the optimal transform,Φ, is relative to the measure of enhancement, 0()EME EME Φ=.A simple modification to the above definition leads to another powerful measure of enhancement, as proposed also by Agaian [8].∑∑==ΦΦΦΦ=Φ212111;min;,max;;min;,max;21,)()(log )()(1)(k l k k w l k w l k wl k w l k k k I I I I k k EME(4)This is known as the measure of enhancement by entrop y, or EME [8]. This measure averages contrast entropy over a given image using a specified block size. To be as accurate as possible, it is reasonable to suggest using a smaller block size to make the data as representative as possible. For this paper, the measure of enhancement by entropy was used along with a block size of 4 by 4.We also wish to introduce the Michelson law based contrast measure :{}{}⎟⎟⎠⎞⎜⎜⎝⎛+−==∑∑==∈∈2111;min;,max;;min;,max;21log 201max ))((max k l k k w l k w l k w l k w l k I I I I k k EME EME φφφφφ (5) These definitions use the Michelson Contrast , or modulation, definition: the relation between the spread and the sum of the two luminances can be represented asModulation = (L max - L min ) / (L max + L min ) (6)The main idea behind this measure is to use the relationship between the spread and the sum of the two luminance values found in a small block. It then takes the average modulation in each block over the entire image. In the context of vision, such a relationship could be caused by scattered light introduced into the view path by a translucent object.{{})(max 21,,,Φ=Φk k AME AME αα(7) Another possible modification would be adaptation of the Michelson law based contrast measure to include contrast entropy. ∑∑==+−⎥⎦⎤⎢⎣⎡+−=Φ212111;min;,max;;min;,max;;min;,max;;min;,max;21,,log 1)(k l k k w l k w l k w l k w l k w l k w l k w l k w l k k k I I I I I I I I k k AME ααα (8)An example of the AWC, EME, EME of Entropy, Michelson Law EME, and AME plotted versus an enhancement parameter, alpha, can be found in Figure 1. Depending on the measure of enhancement, different measures will be more useful than others. Our proposed method works best with the measures based upon entropy such as the EME of Entropy and the AME. For this paper, the EME of Entropy, equation 4, will be used to measure results.(a) (b) (c)(d) (e) (f)Figure 1: (a) Original Pentagon Image, (b-f) Graphs of alpha vs AWC, EME, EME of Entropy, Michelson Law EME, AME. 2.3 Logarithmic transform domain:The transform domain affords us the ability to view the frequency content of an image. It conveniently breaks up the data in regions of lower and higher frequency. However, the histogram of this data is usually less telling and may require another type of transformation. This is because a plot of the histogram of a typical image is compact and uninformative, as shown in Figure 2a.(a) (b)Figure 2: (a) DCT-2 transform domain histogram (b) Logarithmic DCT-2 transform domain histogramBy taking the logarithm of the data, this problem can be avoided. This is done in primarily two steps. The first step requires the creation of a matrix to preserve the phase of the transform image, which is given by the equationθ(8)angleXji=))),((,(jiWhere the angle function returns the angle of the coefficient. This will be used to restore the phase of the transform coefficients. The next step is to take the logarithm of the modulus of the coefficients as shown by the equationˆ(,)ln((,))X i j X i j γηλ=+ (9)Where η, γ, and λ are enhancement parameters, usually set to 1. The shifting coefficient, λ, is needed to keep returning the logarithm of zero, which is undefined. The shifting, in itself, enhances the contrast of the image, though only slightly. This results in a much more visible version of the histogram as shown in Figure 2b. To return the coefficients to the standard transform domain the signal is exponentiated and the phase is restored as shown by),(),(ˆ),(j i j j i X e e j i X θ⋅=′ (10)This preserves the overall image characteristics, ensuring that the returned image is visually similar to the original image, and that the enhancement only plays upon the magnitude of the transform coefficients.This process works with real and complex orthogonal transforms. It is important to keep the phase information unchanged, because the angle contains most of the images underlying characteristic information. The coefficients in equation 9, η and γ, can be utilized as additional enhancement parameters. By changing their values one can find other optimal enhancement points, though for simplicity these coefficients can usually be set to 1. Graphs showing how to use these coefficients along with the EME to locate optimal values can be shown in Figures 3d and 3e.(a)(b)(c)(d)(e)(f)Figure 3: (a) Original Pentagon image, (b) Pentagon image enhanced using LTHMHE with alpha-rooting, using k=0.78 (c) EME vs k, where k is a parameter of enhancement. Other examples of using plots of the EME to find optimal parameter values by picking themaximum: (d) Pentagon image enhanced using LTHMHE with η =1.2 and λ =3, (e) EME vs η vs λ, (f) EME vs γ vs λ.2.2 Choosing optimal parametersSince we have defined our measure of enhancement, it then becomes necessary to define the method of choosing optimal parameters based upon that measure. Utilizing the proposed measure of enhancement based upon entropy affords a simple mathematical basis for determining the optimal parameters of our enhancement.By plotting the EME versus the coefficients of the enhancement on a specific image we can return a descriptive graph as shown in Figure 3c. Interpreting this graph depends on the enhancement method. Since the method which we will be using for optimization involves alpha-rooting, we shall use the simple rule that the maximum EME value returns the optimal point. An example of an original image and its resulting optimized enhancement can also be found in Figure 3, as well as examples of choosing optimal parameter values using multiple parameters can be found in Figures 3d and 3e.2.4 Histogram equalization:Histogram equalization maps the input image’s intensity values to best approximate a uniform distribution. This technique is a useful tool for quick and easy image enhancement. In many cases, equalization successfully balances an image returning an increase in contrast.Given an image A(x,y) and a desired output image B(x,y) there is some transformation function, f, which maps A to B. All the pixels in A in the region a n to a a dn n + will have their values mapped to a corresponding region in B in the range of b n to b b dn n +. Each of these images will have a probability density function (PDF) )(A A n p and )(b b n p .Assuming a 1-1 mapping, it is easy to show thata a Ab b B dn n p dn n p )()(= (11)Using this relationship, it can be shown that the mapping function from A to B is)()()(0a A n A a n nF du u p n n f a==∫ (12)Where )(a A n F is the cumulative probability distribution function of the original image. Therefore, to return a histogram equalized image, an image must be transformed using its cumulative probability function.Histogram equalization's success at image enhancement is because it expands the dynamic range of intensity values while flattening the overall spatial histogram. This leads to a more overall even representation of all the spectrum of intensities, which can be used to bring out otherwise subtle details. This is usually a quick and effective method for image enhancement. On many images, histogram equalization provides satisfactory to good results, but there are a number of images where it fails to properly enhance the test image. The shortcomings and pitfalls of histogram equalization can be easily shown [6].As an example, Figure 4a shows an image of a helicopter. The resulting image after 256-level histogram equalization was applied is shown in Figure 4b. Figure 4c compares the spatial histograms of both images. Notice the loss of information on the body of the helicopter; you can no longer see the windows, or the details of the tail. The main focus of the image has become more of a silhouette than a picture. The background has been over emphasized as well. Other problems with histogram equalization can be artifacts and overall brightness change in the resulting image [6].(a) (b) (c)Figure 4: (a) Original Image of Copter , (b) resulting image after basic histogram equalization of Copter , (c) comparison of thespatial histograms before and after histogram equalization.2.5 Alpha-rooting:Alpha-rooting is a simple method that can be used in combination with many different orthogonal transforms such as the Fourier, Hartley, Haar wavelet and cosine transforms. The method is based upon two simple basic ideas: a) any signal, or image, is comprised of two elements, a magnitude and a phase; b) high frequency coefficients of an image, upon transformation, will have smaller magnitudes than low frequency coefficients. The first property can be shown in the equation below:),(),(),(s p j e s p X s p X θ= (13)It can be shown that the phase of an image contains most of the information needed to reconstruct the image, while the magnitude only contains the intensity of the point. This can be shown by combining the magnitude of one image with the phase of another, which will return almost a perfect reconstruction of the first image. It is then possible to change the magnitude information of an image without altering the basic layout of an image.The second concept behind this method is magnitude reduction. The main idea is that the magnitude of the lower frequency coefficients of a transform will have higher values than the higher frequency components. By raising the magnitude of an image to some value, α, where 0<α<1, the higher valued lower frequency components of an image can be reduced more in proportion to the lower valued high frequency components. This proportional reduction of magnitudes leads to an emphasizing of the high frequency content on an image. The mathematical form of this operation can be seen below. ),(1),(),(),(),(s p j e s p X s p X s p X s p X θαα==−) (14)where X(p,s) is the transform coefficients of the image x(p,s). Taking the inverse transform of the result returns the enhanced image. The resulting output shows an emphasis on the high frequency content of the image without changing the phase of the image results in an overall contrast enhancement of the entire image.3.METHODOLOGY3.1 Logarithmic transform histogram matching with histogram equalizationTraditionally, histogram matching is applied to spatial domain data, adjusting the range of values to match a specified histogram. In this paper, we discuss the application of transform histogram matching, which is a new take on the old concept.While investigating different qualities of images and their respective transform coefficient histograms, it had become apparent that the visually better images returned distinctly different transform histograms from their worse counterparts. This is the basis for our explorations of transform histograms and histogram equalization, a spatial technique that suffers from extreme dynamic range expansion, which can result in ugly artifacts, as previously shown. By combining this basic technique with transform enhancement methods, the end results can be surprisingly better in visual quality and quantitative measurement.Figure 5: Block Diagram of Logarithmic Transform Histogram Matching with Histogram EqualizationThe first proposed algorithm attempts to enhance the image using a histogram equalized image as a baseline. Logarithmic transform histogram matching with histogram equalization (LTHMHE) is detailed in Figure 5, and by the steps listed below:Input: Original ImageStep1: Transform Image (DCT, Fourier, and others)Step 2: Equalize the Histogram of the ImageStep 3: Take logarithm of magnitude coefficientsStep 4: Calculate coefficient histogramStep 5:Take logarithm of original transform dataStep 6: Map data to equalized histogramStep 7: Exponentiate dataStep 8: Restore phase and Inverse TransformOutput: Enhanced ImageThe first step would be to take an image and apply histogram equalization to it. This equalized image would then have its logarithmic transform histogram calculated as previously discussed. The original image would then have its logarithm transform coefficients mapped to create a similar histogram to match the equalized image’s transform histogram coefficients as shown in Figure 6b. The result of this enhancement leads to an overall flattening of the spatial histogram as shown in Figure 6a.(a) (b)Figure 6: (a) Comparison of spatial histograms of an original image, histogram equalization, and LTHMHE, (b) comparison oforiginal, histogram equalized, and LTHMHE3.2 Logarithmic transform histogram matching with histogram equalization with alpha-rootingBuilding off of the foundation of logarithmic transform histogram matching with histogram equalization, questions arose if we could improve the process by including already established methodologies into the algorithm. Alpha-rooting seemed a simple addition which could easily be inserted into our enhancement algorithm. The new algorithm takes the form of the flow graph shown below in Figure 7.The addition of alpha-rooting led to the ability to use the EME to pick an optimum enhancement value for the coefficient built into the alpha-rooting algorithm. This built in recursion allows for manipulation of enhancement variables to return desirable results. It should be noted that this is not the only place alpha-rooting could have been inserted to enhance the algorithm, but that this was the most obvious point.4.EXPERIMENTAL RESULTSTwo new methods were tested in this paper, proving to be formidable, powerful, and fast enhancement techniques. For the purposes of this paper, three images are shown. A table of results can be found in Table 1, and example images can be found in Figures 8, 9, and 10.(a) (b) (c)(d) (e) (f)Figure 8: (a) Original Image EME=0.01201, image enhanced using (b) histogram equalization EME=2.9321, (c) alpha-rooting EME=0.2856, (d) LTHMHE EME=9.9116, and (e) LTHMHE with alpha-rooting EME=40.2839. (f) Graph of EME versus α used tooptimize LTHMHE with alpha-rooting with peak at α=0.65.The first was an image of an Artic hare, chosen because of its strong concentration of data points around the intensity level of 255. This type of image, when enhanced, can have its dynamic range expanded to the point of changing the overall tone of the picture, along with creating ugly artifacts [6].The second image chosen was the Copter image. This image has the interesting characteristic of a relatively dark central area and a lighter, textured background. This image is usually difficult to enhance due to its unbalanced nature, leading most methods to either enhance the helicopter or the background but at the sacrifice of the other object.The third image chosen was the Plane image. This image is the direct opposite of the artic hare image, because it has data points concentrated around the lower end of the intensity spectrum. This image has hidden contour lines in the background along with prevalent film grain which cannot be seen in the original image.The first image’s overall tone is almost perfectly white, with very little variation, making it a hard image to enhance without altering the image drastically. The original EME had an extremely low value of 0.01201. After applying our logarithmic transform histogram matching with histogram equalization algorithm to the image we returned an EME of 9.9116, a huge increase in contrast. Compared to straight histogram equalization, which caused artifacts, tonal change to the image, and an EME of 2.392, LTHMHE enhanced the image better and avoided the undesirable side effects. Alpha-rooting performed admirably, raising the EME to 0.2856 by itself, although the image had the characteristic gray effect from the method. However, when we used the modified LTHMHE algorithm to include alpha-rooting we improved our resulting EME to 40.2839. Both the LTHMHE and the LTHMHE with alpha-rooting returned visually better results than alpha-rooting alone and histogram equalization. These results can be seen in Figure 8.(a) (b) (c)(f)(d) (e)Figure 9: (a) Original Image EME=0.03593, image enhanced using (b) histogram equalization EME=1.3027, (c) alpha-rooting EME=2.3506, (d) LTHMHE EME=9.015, and (e) LTHMHE with alpha-rooting EME=127.8699. (f) Graph of EME versus α used tooptimize LTHMHE with alpha-rooting with peak at α=0.04.The second image, the Copter, is a difficult image to enhance due to the tendency to enhance either the background or the helicopter but not both. The original image had an EME of 0.03593. Histogram equalization returned questionable results, with a complete loss of detail in the helicopter returning and EME of 1.3027. This is characteristic of the extreme dynamic range expansion problem which plagues histogram equalization. Our LTHMHE algorithm corrected this, returning visually pleasing results and an EME of 9.015. Alpha-rooting, alone, improved the image noticeably, returning an EME of 2.3506, again with the characteristic graying of the image. Inserting alpha-rooting into our LTHMHE algorithm returned the best results, conveying much more detail in both the helicopter and in the background. This exciting result returned an EME of 127.8699. Again, visually, the LTHMHE and LTHMHE with alpha-rooting returned better results that histogram equalization and alpha-rooting alone. These results can be seen in Figure 9.The third image, the Plane, is characteristically dark and dull. Our enhancement technique brought out the subtle details on the wings of the plane and in the background without overemphasizing any specific part of the image. The original image had an EME of 0.3340. Histogram equalization brought the EME of the image up to 23.3756, at the sacrifice of much of the image detail. This image shows the over-enhancement attribute of histogram equalization well, which caused a lot of the image to be lost in the grain and noise as well as the over emphasized subtle background ripples. After our process, LTHMHE, the enhanced image returned an EME of 33.8779, a staggering improvement. The image is visually clearer, more detailed, and generally better than the histogram equalized version. Alpha-rooting returned a slightly sharper image than the original returning an EME of 55.1932, while our LTHMHE with alpha-rooting returned an even higher EME of 138.578. As before, LTHMHE and LTHMHE with alpha-rooting returned results that were much more visually appealing that those found using histogram equalization and alpha-rooting. These results can be seen in Figure 10.(a) (b)(c)(c) (d) (e)Figure 10: (a) Original Image EME=0.33396, image enhanced using (b) histogram equalization EME=23.3756, (c) alpha-rooting EME=55.1932, (d) LTHMHE EME=33.8779, and (e) LTHMHE with alpha-rooting EME=138.578. (f) Graph of EME versus α usedto optimize LTHMHE with alpha-rooting with peak at α=0.08.Table 1: Comparison of resulting EME’s of different enhancement methods Original Histogram EqualizedAlpha rooting LTHMHELTHMHE with Alpha Rooting Artic Hare 0.012008 2.9321 α=0.80 0.2856 9.9116 α=0.65 40.2839 Copter 0.035928 1.3027 α=0.80 2.3506 9.015 α=0.04 127.8699 Moon 0.8681 6.6359 α=0.70 156.249 31.8327 α=0.56 91.8347 Pentagon 0.21835 41.5252 α=0.74 110.482 86.8147 α=0.78 331.0331 Plane 0.33396 23.3756 α=0.79 55.1932 33.8779 α=0.08 138.5785. CONCLUDING REMARKSThis paper proposed a new method of image enhancement based upon the logarithmic transform coefficient histogram using contrast entropy as a measure of performance and of optimization. Our results demonstrated the power of the logarithmic transform histogram matching with histogram equalization method, showing it to outperform classical histogram equalization. We also showed the modular nature of the proposed algorithm through the addition of alpha-rooting as a performance booster. As a benchmark, the performance of this algorithm was compared to established enhancement techniques: histogram equalization and alpha-rooting.A measure of enhancement is not a perfect science. There is not universal measure for image enhancement. In choosing a measure, it is necessary to choose those qualities in the image which are being measured. In our case we chose contrast. The measure was used to find optimal values as well as show image improvement numerically. After。
Logarithmic Sobolev Inequalities and Spectral Gaps
Logarithmic Sobolev Inequalities and Spectral GapsEric Carlen 1and Michael Loss 1School of Mathematics,Georgia Tech,Atlanta,GA 30332January 24,2004AbstractWe prove an simple entropy inequality and apply it to the problem of determining log–Sobolev constants.1IntroductionLet µbe a probability measure on R n of the form d µ=e −V (x )d x .One says that µadmits a logarithmic Sobolev inequality with constant b in case for all functions f on R n with R n f 2d µ=1,R n f 2ln f 2d µ≤b R n|∇f |2d µ.(1.1)There is an extensive literature devoted to the specification of conditions under which there is a logarithmic Sobolev inequality associated to µ,and the determination of the best constant b when such an inequality does hold.A number of years ago,it was shown by Bakry and Emery [2]that when V is uniformly strictly convex;i.e.,when the Hessian of V satisfiesHess V (x )≥2cI ,(1.2)for all x ,then (1.1)holds with b =1/c .Since the method of Bakry and Emery requires that (1.2)hold uniformly,it does not apply in many cases of interest.One says that µadmits a spectral gap with constant λin case for all functions u on R n with R n u d µ=0,R n u 2d µ≤1λ R n |∇u |2d µ.(1.3)Taking f to have the form f =√1−α2+αu where u is orthogonal to the constants,a simpleTaylor expansion yieldsR nf 2ln f 2d µ=α2 3 R n u 2d µ−1 +O (α3),(1.4)1Work partially supported by U.S.National Science Foundation grant DMS 03-00349.c2004by the authors.This paper may be reproduced,in its entirety,for non-commercial purposes.1at least when u is bounded.Since in this case we also have,R n |∇f|2dµ=α2R n|∇u|2dµ,it follows that wheneverµadmits a logarithmic Sobolev inequality with constant b,it admits a spectral gap with constantλ≥2/b.This useful fact was observed by Rothaus[7].Often it is much easier to prove a spectral gap than is is to prove a log–Sobolev inequality. Indeed,there are many examples of measuresµthat admit a spectral gap,but do not admit a log–Sobolev inequality.At this meeting,several problems have been discussed in which a spectral gap has been proved,but a log-Sobolev inequality has not–or at least not with useful constants.It can however be realtively easy to directly establish a restricted log–Sobolev inequality:Definition In case for somefinite b,(1.1)is satisifed wheneverR n f dµ=0andR nf2dµ=1,(1.5)themµsatisifes a restricted log–Sobolev inequality.Our aim here is to show that wheneverµhas the formµ=e−V(x)d x,andµadmits a spectral gap,then under broad,easy to check conditions,µadmits a restricted log–Sobolev inequality with an explicit constant.¿From this,we then deduce an unrestriced log-Sobolev constant forµ. The passage from the restricted to the unrestricted inequality based on a simple a–priori entropy inequality.We explain this in the second section,and then in the third section,we show how restricted log–Sobolev inequalities may be easily established.The restriced log–Sobolev inequalities considered here are closely related to what are sometimes called deffective log–Sobolev inequalities.These take the formR n f2ln f2dµ≤bR n|∇f|2dµ+aR nf2dµ(1.6)for all f withR nf2dµ=1.Ifµadmits a spectral gap with constantλ,and(1.6)is satisfied,thenwhenever u satisifies(1.5),bR n |∇u|2dµ+aR nu2dµ≤b+aλR n|∇u|2dµso that a defective log–Sobolev inequality,together with a spectral gap,implies a restricted log–Sobolev inequality.There have been many investigations of log–Sobolev inequalities in the setting of diffusion semigroups,starting from the ground breaking work of Gross[6]demonstrating the equivalence of hypercontractivity of a diffusion semigroup with the validity of a log–Sobolev inequality for the associated Dirichlet form.See[1]for an insightful recent survey,and of particular relevance here, recent work of Cattiaux[3].In particular,Cattiaux[3]has recently obtained log–Sobolev inequalities under conditions sim-ilar to those in Theorem2.2below,however his methods are considerably more complicated,and do not provide explicit constants.Many earlier researchers have also relied on diffusion semigruop arguments.For example,it is well known that a defective log–Sobolev inequality together with a spectral gap implies a log–Sobolev inequality.The standard proof uses Gross’s Theorem and an argument of Glimm [5].Gross’s Theorem assures that if µsatisfies a defective log–Sobolev inequality,then the diffusion semigroup P t associated to the Dirichelt form R n |∇u |2d µis bounded from L 2to L 4for some t 0>0.Next,the argument of Glimm is used to show that if a diffusion semigroup P t is bounded from L 2to L 4and some time t 0,and its generator has a spectral gap,then for some t 1>t 0,P t 1is a contraction from L 2to L 4.This contractivity,together with an interpolation argument and Gross’s Theorem once again give the log–Sobolev inequality.This sort of argument is well known,but rather indirect.Our aim here is to provide a simple,direct passage from defective log–Sobolev inequalities to log–Sobolev inequalities via spectral gaps,and also to provide a simple and direct criterion for the validity of defective log–Sobolev inequalities.Because the arguments are simple and direct,they lead to sharper,more explicit results in many cases.2A convexity inequality for entropyOur goal in this section is to prove the following inequality:2.1THEOREM.Let µbe any probability measure on a sigma algebra S of subsets of some set Ω.Let u be any measurable real valued function withΩu 2d µ=1and Ωu d µ=0.For all αwith 0≤α≤1,definef (x )= 1−α2+αu (x ).ThenΩf 2ln f 2d µ≤2α2+α4+α2Ωu 2ln u 2d µ.(2.1)Before proving the theorem,we make several remarks.First,because u is normalized in L 2and is orthogonal to the constants,f is also normalized in L 2.That is,both u 2d µand f 2d µare probability measures.Second,the Taylor expansion (1.4)shows that the constant 2is the best possible constant multiplying α2in (2.1),for if u (x )=±1for every almost every x ,then the right hand side of (2.1)reduces to 2α2+α4.Third,it might seem natural to try and prove (2.1)by controlling the remainder terms in the Taylor expansion.However,extracting an estimate on the remainder involving only αandΩu 2ln u 2d µdoes not seem to be straightforward.Instead,we first prove an L p inequality that is an identity at p =2.Differentiation in p will yield Theorem 2.1.The L p inequality is the following:2.2THEOREM.Let µbe any probability measure on a sigma algebra S of subsets of some set Ω.Let u be any measurable real valued function withΩu 2d µ=1and Ωu d µ=0.For all αwith 0≤α≤1,definef (x )= 1−α2+αu (x ).Then for p ≥2,f p p ≤(1−α2)p/2+p (p −1)2 f (p −2)p α2 u 2p .(2.2)Proof:For t real,define φ(t )byφ(t )=Ω|c +tu |p d µwhere c =√1−α2.Differentiating,we findφ (t )=p Ω((c +tu )2)p/2−1(c +tu )u d µ.In particular,φ (0)=p |c |p −2cΩu d µ=0.(2.3)Differentiating once more,we findφ (t )=p (p −1)Ω|c +tu |p −2u 2d µ.(2.4)Applying Holder’s inequality with indices p/(p −2)and p/2,we obtainφ (t )≤p (p −1) c +tu p −2p u 2p=p (p −1)φ(t )(p −2)/p u 2p .(2.5)Together,(2.3)and (2.4)show that φis increasing in t ≥0,and thus,for all t with 0≤t ≤α,we have from (2.5)thatφ (t )≤p (p −1)φ(α)(p −2)/p u 2p .(2.6)Then,once again using (2.3),φ(α)=φ(0)+α0 t 0φ (s )d s d t .(2.7)Using the estimate (2.6)in (2.7)yields theresult.Proof of Theorem 2.1:We notice first that (2.2)holds as an equality at p =2.We may therefore differentiate both sides in p at p =2to obtain a new inequality.We first compute d d p f p −2p = 2p ln Ω|f |p d µ −p −2p 1 f p p Ω|f |p ln |f |d µ f p −2p .Since f 2=1,this vanishes at p =2.Next,for g =αu ,d d p g 2p = −2p 2ln g p p +2p 1 g p p Ω|g |p ln |g |d µ .At p =2,this reduces to 12 Ωg 2ln g 2 g 22 d µ=α22 Ωu 2ln u 2d µ.Finally,the derivative of p (p −1)/2at p =2is 3/2,and the derivative of c p at p =2is c p ln c .On the left hand side,the derivative of f p p at p =2is Ωf 2ln |f |d µ.Altogether,we haveΩf 2ln f 2d µ≤(1−α2)ln(1−α2)+3α2+α2 Ωu 2ln u 2d µ.(2.8)However,by concavity of the logarithm,(1−α2)ln(1−α2)≤−(1−α2)α2so that(1−α2)ln(1−α2)+3α2≤2α2+α4.Using this in (2.8)gives us(2.1).3Application to logarithmic Sobolev inequalitiesIn this section,we consider Ω=R n ,andd µ=e −V (x )d n x ,and are concerned with the following question:Suppose V is such that µadmits a spectral gap with constant λ.What further conditions on V then ensure that µalso admits a logarithmic Sobolev constant for some finite constant b ?The following lemmas provide a positive answer.The first says that if µadmits a spectral gap,and if µadmits a restricted log-Sobolev inequality,then it admits an unrestriced log-Sobolev inequality,and it provides a simple estimate for the constant.3.1LEMMA.Suppose that µadmits a spectral gap λ>0,and for some finite b , R n u 2ln u 2d µ≤b R n|∇u |2d µwheneverR n u d µ=0and R n u 2d µ=1.Then µadmits a logarithmic Sobolev inequality with constant no larger thanb +3λ.Proof:Consider any f with R n f 2d µ=1,and write it in the form considered in Theorem 2.1.Then,by Theorem 2.1, R n f 2ln f 2d µ≤3α2+α2R n u 2ln u 2d µ.By the spectral gap inequality,α2=α2R n u 2d µ≤α2λ R n |∇u |2d µ≤1λR n |∇f |2d µ.By hypothesisα2R n u 2ln u 2d µ≤bα2 R n |∇u |2d µ≤b R n |∇f |2d µ.This yields theresult.The next lemma gives conditions under which a restricted log-Sobolev inequality may be proven.3.2LEMMA.Suppose that V is C 2,and that µadmits a spectral gap λ>0,and−C =inf x 14|∇V (x )|2−12∆V (x )−πe 2V (x ) >−∞.(3.1)Then for all u satisfyingR n u d µ=0and R n u 2d µ=1,R n u 2ln u 2d µ≤λ(λ+|C |)πe 2R n |∇u |2d µ.Before proving Lemma 3.2,we recall a special case of the family of logarithmic Sobolev inequal-ities on R n equipped with Lebesgue measure:For all functions g on R n with R n g 2d n x =1,R ng 2ln g 2d n x ≤1πe 2 R n |∇g |2d n x .Proof of Lemma 3.2:Consider any function u with R n u d µ=0,and R n u 2d µ=1.Then forany t with 0<t <1,R n |∇u |2d µ−tπe 2 R n u 2ln u 2d µ=(1−t ) R n |∇u |2d µ+t R n |∇u |2d µ−πe 2 Rn u 2ln u 2d µ≥(1−t )λ R n u 2d µ+t R n |∇u |2d µ−πe 2 R nu 2ln u 2d µ .(3.2)Next,defineg (x )=u (x )e −V (x )/2so thatR n u 2d µ=R n g 2d n x .When U is smooth with compact support and V,a simple computation revealsR n |∇u|2dµ=R n|∇g|2d n x+R nW g2d n xwhereW(x)=14|∇V(x)|2−12∆V(x).A standard approximation argument shows identity,the so–called“ground state stransformation”is generally valid.An even simpler computation revealsR n u2ln u2dµ=R ng2ln g2d n x+R nV g2d n x.Therefore,R n |∇u|2dµ−πe2R nu2ln u2dµ=R n|∇g|2d n x−πe2R ng2ln g2d n x+R nW−πe2Vg2d n x≥R nW−πe2Vg2d n x.(3.3)Therefore,R n |∇u|2dµ−tπe2R nu2ln u2dµ≥R n(1−t)λ+tW−πe2Vg2d n x.The integrand is non negative provided that1 4|∇V(x)|2−12∆V(x)−πe2V(x)+1−ttλ≥0for all x.Define C by(3.1).Then provided C isfinite,we can chose t=λ/(λ+|C|),and the integrand will bepositive.Lemmas3.1and3.2immediately yield the following theorem:3.3THEOREM.Suppose that V is C2and thatµadmits a spectral gapλ>0,and−C=infx14|∇V(x)|2−12∆V(x)−πe2V(x)>−∞.thenµadmits a logarithmic Sobolev inequality with constant b no larger thanλ(λ+|C|)πe2+3λ.Notice that if V(x) |x|γand|∇V(x)| |x|γ−1,then the condition that C isfinite requires γ≥2.This is consistent with the fact that wheneverµadmits a logarithmic Sobolev inequality with somefinite constant b,there is a numberβ>0so thatR neβ|x|2dµ<∞.Thus,concerning qualitative growth conditions on V,Theorem3.3is sharp.It is however surprising that the Laplacian of V enters C with a negative sign,given that the Bakry–Emery condition implies a logarithmic Sobolev inequality forµwhenever the Hessian of V is uniformly bounded below.To end the discussion,let us note that in one dimension estimates of the gap are relatively easy to come by.It was shown before that with u=e V/2g(1.3)reduces toR n |∇g(x)|2+|∇V|24−∆V2|g|2d n x≥λR n|g|2d n x.and must hold for all functions g satisfying the conditionR nge−V/2d n x=0.In other words,thebest possible value forλis given by the gap of the Schr¨o dinger operator−∆g+|∇V|24−∆V2g=λg.(3.3)Clearly,the function g0=e−V/2is the ground state of this Schr¨o dinger equation with corresponding eigenvalue zero.By an elementary calculation is easily seen thatλis the second eigenvalue of theoperator(on L2(R,d x))−dd x−g 0g0dd x−g 0g0.(3.4)By the well known commutation formula(see,e.g.[4]),the operatord d x −g 0g0−dd x−g 0g0hasλas its lowest eigenvalue,in fact it has the same spectrum as(3.3)except for the lowest eiegnvalue zero.Thus,the gapλis now the lowest eigenvalue of the operator−d2 d x +V2+V 24,which is given by an unconstrained minimization.Notice also,that here the second derivative of the potential shows up with the“right”sign.4AcknowledgementsThis paper grew out of discussions betwen the authors while both were visiting Cedric Villani at E.N.S.Lyon in June2003.We thank Cedric for hosting us,and for many interesting discussion on a problem of proving a family of log–Sobolev inequalities on R n with constants independent of the dimension.This problem arises in a large deviations problem considered by several authors,and in particular,Otto and Villani,and is explained in these procedings.References[1]C.Ane et al.,Sur les in´e galit´e s de Sobolev Logarithmiques,Soc.Math de France,Panoramaset Synth`e ses,No.10,200.[2]D.Bakry,M.Emery Hypercontractivit´e de semi–groups de diffusion,C.R.Acad.Sci.ParisS´e r I Math.299775–778(1984)[3]P.Cattiaux,Hypercontractivity for perturbed diffusion semigroups,preprint,2003.[4]P.A.Deift,Applications of a commutation formula,Duke Math.J.45267–310(1978).[5]J.Glimm,Bosonfields with nonlinear self interaction in two dimensions,Commun.Math.Phys.,812–25(1968)[6]L.Gross,Logarithmic Sobolev inequalities,Amer.Jour.Math,971061–1083(1976)[7]O.S.Rothaus,Lower bounds for eigenvalues of regular Sturm–Liouville operators and thelogarithmic Sobolev inequality,Duke Math.Jour.45351–362(1978)。
Possible Negative Pressure States in the Evolution of the Universe
ible matter: the vacuum energy (also known by such names as dark energy, quintessence, x-matter,
become unbound, while the nongravitationally bound systems remain bound.
Meanwhile, it is convenient to express the mean densities ρi of various quantities in the Universe in terms of their fractions relative to the critical density: Ωi = ρi/ρcrit. The theory of cosmological
system of equations. Their results showed that even for very slow growth of Λ (which satisfies all
the conditions on the variation of GN ), in the distant future the gravitationally bound systems
1E-mail: chukh0581@ 2The second address : P.O. Box 30-15, Shanghai 200030, PR China.
–2–
term have been presented before. For example, we can start from the Einstein action describing the gravitational forces in the presence of the cosmological constant (Padmanabhan 2003)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
However, the evaluation of the integral is not easy and, so far, we can only
give examples with trivial L(∂Ω) – see Proposition 3 below.
We were led to consider the integral of ψθ by the works of Branson-Ørstead [4] and Parker-Rosenberg [20] on the constructions of conformal invariant
has a singularity along the boundary diagonal. If we take a smooth defining
function ρ of the domain, which is positive in Ω and dρ = 0 on ∂Ω, then (by
[6] and [2]) we can expand the singularity as
(1.1)
Sθ(z, z) = ϕθ(z)ρ(z)−n + ψθ(z) log ρ(z),
where ϕθ and ψθ are functions on Ω that are smooth up to the boundary. Note that ψθ|∂Ω is independent of the choice of ρ and is shown to gives a local invariant of the pseudohermitian structure θ.
(ii) Let {Ωt}t∈R be a C∞ family of strictly pseudoconvex domains in M . Then L(∂Ωt) is independent of t.
In case n = 2, we have shown in [13] that
ψθ |∂ Ω
of the coefficient an of the asymptotic expansion kt(x, x) ∼ t−n∞ j=0 Nhomakorabeaaj
(x)tj
is shown to be a conformal (resp. CR) invariant, while the integrand andvg
does depend on the choice of a scale g ∈ [g] (resp. a contact form θ). This is
We here prove that the integral of the coefficient of the logarithmic singularity of the Szego¨ kernel gives a biholomorphic invariant of a domain Ω, or a CR invariant of the boundary ∂Ω, and moreover that the invariant is unchanged under perturbations of the domain (Theorem 1). We also show that the same invariant appears as the coefficient of the logarithmic term of the volume expansion of the domain with respect to the Bergman volume element (Theorem 2). This second result is an analogy of the derivation of a conformal invariant from the volume expansion of conformally compact Einstein metrics which arises in the AdS/CFT correspondence – see [10] for a discussion and references.
from the heat kernel kt(x, y) of conformal Laplacian, and their CR analogue
for CR invariant sub-Laplacian by Stanton [22]. For a conformal manifold
of even dimension 2n (resp. CR manifold of dimension 2n − 1), the integral
a natural consequence of the variational formula for the kernel kt(x, y) under
conformal scaling, which follows from the heat equation. Our Theorem 1
is also a consequence of a variational formula of the Szego¨ kernel, which is
1. Introduction
This paper is a continuation of Fefferman’s program [7] for studying the geometry and analysis of strictly pseudoconvex domains. The key idea of the program is to consider the Bergman and Szego¨ kernels of the domains as analogs of the heat kernel of Riemannian manifolds. In Riemannian (or conformal) geometry, the coefficients of the asymptotic expansion of the heat kernel can be expressed in terms of the curvature of the metric; by integrating the coefficients one obtains index theorems in various settings. For the Bergman and Szego¨ kernels, there has been much progress made on the description of their asymptotic expansions based on invariant theory ([7], [1], [15]); we now seek for invariants that arise from the integral of the coefficients of the expansions.
Theorem 1. (i) The integral
L(∂Ω, θ) = ψθ θ ∧ (dθ)n−1
∂Ω
is independent of the choice of a pseudohermitian structure θ of ∂Ω. Thus we may write L(∂Ω) = L(∂Ω, θ).
1
2
LOGARITHMIC SINGULARITY OF THE SZEGO¨ KERNEL
Let Ω be a relatively compact, smoothly bounded strictly pseudoconvex
domain in a complex manifold M . We take a pseudohermitian structure θ, or a contact form, of ∂Ω and define a surface element dσ = θ∧(dθ)n−1. Then we may define the Hardy space A(∂Ω, dσ) consisting of the boundary values of holomorphic functions on Ω that are L2 in the norm f 2 = ∂Ω |f |2dσ. The Szego¨ kernel Sθ(z, w) is defined as the reproducing kernel of A(∂Ω, dσ), which can be extended to a holomorphic function of (z, w) ∈ Ω × Ω and
arXiv:math/0309176v1 [math.CV] 10 Sep 2003
LOGARITHMIC SINGULARITY OF THE SZEGO¨ KERNEL AND A GLOBAL INVARIANT OF STRICTLY PSEUDOCONVEX DOMAINS
KENGO HIRACHI
Webster connection for θ. Thus the integrand ψθ θ∧dθ is nontrivial and does
depend on θ, but it also turns out that L(∂Ω) = 0 by Stokes’ theorem. For
higher dimensions, we can still give examples of (∂Ω, θ) for which ψθ|∂Ω ≡ 0.
The proofs of these results based on Kashiwara’s microlocal analysis of the Bergman kernel in [17], where he showed that the reproducing property of the Bergman kernel on holomorphic functions can be “quantized” to a reproducing property of the microdifferential operators (i.e., classical analytic pseudodifferential operators). It provides a system of microdifferential equations that characterizes the singularity of the Bergman kernel (which can be formulated as a microfunction) up to a constant multiple; such an argument can be equally applied to the Szego¨ kernel. These systems of equations are used to overcome one of the main difficulties, when we consider the analogy to the heat kernel, that the Bergman and Szego¨ kernels are not defined as solutions to differential equations.