章 传感器特性
第三章 传感器的静态特性和动态特性讲解
例1:一阶传感器的频率响应,系统输入量(压力) F 为F(t)= b0 x(t ),输出 量为位移y( t ),不考虑运动。
解:①列出微分方程
a1
dy dt
a0
y
b0
x
②作拉普-拉斯变换
Y (S )(a1S a0 ) b0 X (S )
③令H(S )中的S =jω,即σ= 0
H ( j ) Y (S ) b0 X (S ) ja1 a0
ΔLj=(b+kxj)-yj
均方差函数为: 取其极小值,有:
4)总精度 系统的总精度由其量程范围内的基本误差与满度值Y(FS)之
比的百分数表示。基本误差由系统误差与随机误差两部分组成, 迟滞与线性度所表示的误差为系统误差,重复性所表示的误差 为随机误差。
总精度一般可用方和根来表示,有时也可用代数和表示。
统示值范围上、下限之差的模。当输入量在量程范围以内 时,系统正常工作并保证预定的性能。
对于4-20mA标准信号,零位值 yo=so=4mA,上限值 yfs=20mA,量 程 y(FS)=16mA。
3)灵敏度 S 输出增量与输入增量的比值。即
① 纯线性传感器灵敏度为常数:S=a1。
② 非线性传感器灵敏度S与x有关。
4)分辨率
在规定的测量范围内,传感器所能检测出输入量 的最小变化值。有时用相对与输入的满量程的相对 值表示。即
2、静态特性的性能指标
1) 迟滞现象(回差EH )
回差EH 反映了传感器的输 入量在正向行程和反向行程全 量程多次测试时,所得到的特 性曲线的不重合程度。
2) 重复性 Ex (不重复性) 重复性 Ex 反映了传感器在输入量按同一方向(增或减)全
传感器的一般特性

• 通常用下面四个指标来表示传感器的动态性 能(P37): (1)时间常数τ (2)上升时间tr (3)响应时间t5、t2 (4)超调量
• 2.频域性能指标(P32) 通常在正弦信号作用下测定传感器动 态性能的频域指标,称为频率法。具体方 法是在传感器输入端加恒定幅值的正弦信 号,测出不同频率下稳定输出信号的幅值, 绘制出幅频特性曲线。 频域通常有下面三个动态性能指标: (1)通频带 b (2)工作频带 (3)相位误差
• 2.2传感器的动态特性 传感器的动态特性是指输入量随时间动态变 化时,其输出与输入的关系。传感器所检测的物 理量大多数是时间的函数,为使传感器输出信号 及时准确地反映输入信号的变化,不仅要求它具 有良好的静态特性,还要求它具有良好的动态特 性。 为研究传感器的动态特性,可建立其动态数 学模型,用数学中的逻辑推理和运算方法,分析 传感器在动态变化的输入量作用下,输出量如何 随时间改变。也常用实验手段研究传感器的动态 特性,即给传感器一个“标准”信号(正弦输入 和阶跃输入),测出其输出随时间的变化关系, 进而得到其各项动态特性技术指标。
1.理想的线性特性 当a0=a2 =a3=…=an=0时,具有这种特性。此时 y=a1x,静态特性曲线是一条直线,传感器的灵敏 度为Sn=y/x=a1=常数 2.非线性项仅有一次项和偶次项 即y= a1x+a2x2+a4x4+… 因不具有对称性,其线性范围较窄,所以在设 计传感器时一般很少采用这种特性。当出现 时,必须采取线性化补偿措施。
• 2.2.1传感器的动态数学模型 要精确建立传感器或其测试系统的数学 模型是很困难的,在工程上采取一些近似, 略去一些影响不大的因素。通常把传感器 看成一个线性时不变系统,用常系数线性 微分方程来描述其输出量y与输入量x之间的 关系。 对于一个复杂的系统或输入信号,求解 微分方程是很难的,常用一些足以反映系 统动态特性的函数,将系统的输出与输入 联系起来,这些函数有传递函数、频率响 应函数和脉冲响应函数等。
第3章传感器基本特性(精)
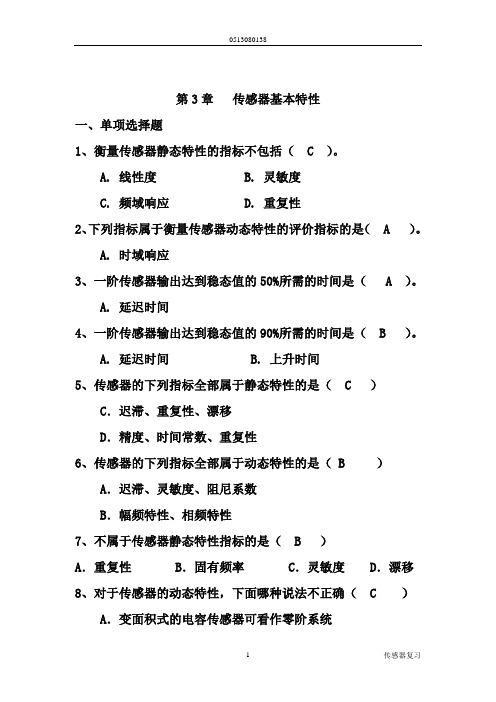
第3章传感器基本特性一、单项选择题1、衡量传感器静态特性的指标不包括( C )。
A. 线性度B. 灵敏度C. 频域响应D. 重复性2、下列指标属于衡量传感器动态特性的评价指标的是( A )。
A. 时域响应3、一阶传感器输出达到稳态值的50%所需的时间是( A )。
A. 延迟时间4、一阶传感器输出达到稳态值的90%所需的时间是( B )。
A. 延迟时间B. 上升时间5、传感器的下列指标全部属于静态特性的是( C )C.迟滞、重复性、漂移D.精度、时间常数、重复性6、传感器的下列指标全部属于动态特性的是( B )A.迟滞、灵敏度、阻尼系数B.幅频特性、相频特性7、不属于传感器静态特性指标的是( B )A.重复性 B.固有频率 C.灵敏度 D.漂移8、对于传感器的动态特性,下面哪种说法不正确( C )A.变面积式的电容传感器可看作零阶系统B.一阶传感器的截止频率是时间常数的倒数C.时间常数越大,一阶传感器的频率响应越好D.提高二阶传感器的固有频率,可减小动态误差和扩大频率响应范围9、属于传感器动态特性指标的是( B )A.重复性 B.固有频率 C.灵敏度 D.漂移10、无论二阶系统的阻尼比如何变化,当它受到的激振力频率等于系统固有频率时,该系统的位移与激振力之间的相位差必为( B )A. 0°B.90°11、传感器的精度表征了给出值与( B )相符合的程度。
A.估计值B.被测值C.相对值D.理论值12、传感器的静态特性,是指当传感器输入、输出不随( A )变化时,其输出-输入的特性。
A.时间13、非线性度是测量装置的输出和输入是否保持( C )关系的一种度量。
A.相等B.相似C.理想比例D.近似比例14、回程误差表明的是在( C )期间输出-输入特性曲线不重合的程度。
A.多次测量B.同次测量C.正反行程D.不同测量15、已知某温度传感器为时间常数τ3=秒的一阶系统,当受到突变温度作用后,传感器输出指示温差的三分之一所需的时间为( C )秒A.3 B.1 C. 1.2 D.1/3 二、多项选择题1.阶跃输入时表征传感器动态特性的指标有哪些?( ABC )A.上升时间B.响应时间C.超调量2.动态响应可以采取多种方法来描述,以下属于用来描述动态响应的方法是:(BCD )B.频率响应函数C.传递函数D.脉冲响应函数3. 传感器静态特性包括许多因素,以下属于静态特性因素的有( ABCD )。
第2章传感器特性
第2章 传感器基本特性
迟滞误差由满量程输出的百分数表示:
2.1 传感器静态特性
为正、反 行程输出值之间的最大差值
产生迟滞误差的原因:主要是由于敏感元件材料的物理 性质缺陷造成的。如弹性元件的滞后,铁磁体、铁电体 在加磁场、电场作用下也有这种现象。 迟滞误差的存在使输入输出不能一一对应。
传感器原பைடு நூலகம்及应用
第2章 传感器基本特性
2.1 传感器静态特性
—— 最大非线性绝对误差 —— 满量程输出 —— 线性度
线性度 是表征实际特性与拟合直线不吻合的参数
由于实际传感器总有(高次项)非线性存在,输入输出关系总是非线性关系,使近似后的拟合直线与实际曲线存在偏差。这个最大偏差称为传感器的非线性误差。 通常用相对误差表示线性度
正弦信号
单位阶跃信号
传感器原理及应用
第2章 传感器基本特性
(1) 传递函数
2.2 传感器动态特性
输入激励 x(t)
输出响应 y(t)
传感器系统
为了分析动态特性,首先要写出传感器的数学模型求出传递函数。 已知外界有一激励施加于系统时,系统对外界有一响应;
传感器是个信号转换元件,假设是测力传感器,系统存在阻尼,弹性和惯性元件; 当输入量随时间变化时,在力作用下,输出不仅与位移x有关,还与速度dx/dt、加速度d2x/dt2有关。
第2章 传感器基本特性
2.2 传感器动态特性
多数传感器输入信号是随时间变化的,只是变化的快慢不同而已。缓慢变化的信号容易跟踪,变化较快的信号跟踪性能会下降。 一个动态性能好的传感器输入与输出应具有相同的时间函数,但除理想状态外,输出信号一定不会与输入信号有相同时间函数。 这种输入输出之间的差异就是动态误差。
第一章 传感器的一般特性2zz

7、漂移
漂移是指传感器的被测量不变,而其输出 量却发生了不希望有的改变。
y 灵敏度漂移
零点漂移 灵敏度漂移 时间漂移(时漂) 温度漂移(温漂)
2 1 零点漂移 O x
8 分辨力和阈值
(1)阈值:当传感器的输入从零开始缓慢增加时, 只有在达到了某一值后,输出才发生可观测的变化,这 个值说明了传感器可测出的最小输入量,称为传感器的 阈值。 (2)分辨力:当传感器的输入从非零的任意值缓慢 增加时,只有在超过某一输入增量后,输出才发生可观 测的变化,这个输入增量称为传感器的分辨力。
取较大者为
RMax
ΔRmax2 ΔRmax1
R ( R Max yFS ) 100%
x
6.稳定性 稳定性表示传感器在较长时间内保持 其性能参数的能力,故又称长期稳定性。 稳定性可用相对误差或绝对误差表示。 表示方式如: 个月不超过 %满量程输 出。有时也采用给出标定的有效期来表示。
第一章 传感器的一般特性
在工程应用中,任何测量装置性能的优劣总要 以一系列的指标参数衡量,通过这些参数可以方便地 知道其性能。这些指标又称之为特性指标。 传感器可看作二端口网络,即有两个输入端和 两个输出端,输出输入特性是其基本特性,可用静态 特性和动态特性来描述。
输入
传感器
输出
1. 1 传感器的静特性
九、抗干扰能力
设计、选用、购买
1、量程和范围
传感器所能测量的最大被测量(输入量)的数值称为测量上
限,最小被测量称为测量下限,上限与下限之间的区间,则 称为测量范围。
量程---测量上限与下限的代数差。
测量范围为-20~+20℃,量程为40℃; 测量范围为-5~+10g,量程为15g; 测量范围为100~1000Pa,量程为900Pa;
传感器 课后题及答案

传感器课后题及答案第1章传感器特性1.什么是传感器?(传感器定义)2.传感器由哪几个部分组成?分别起到什么作用?3. 传感器特性在检测系统中起到什么作用?4.解释下列名词术语:1)敏感元件;2)传感器; 3)信号调理器;4)变送器。
5.传感器的性能参数反映了传感器的什么关系?静态参数有哪些?各种参数代表什么意义?动态参数有那些?应如何选择?6.某传感器精度为2%FS ,满度值50mv ,求出现的最大误差。
当传感器使用在满刻度值1/2和1/8 时计算可能产生的百分误差,并说出结论。
7.一只传感器作二阶振荡系统处理,固有频率f0=800Hz,阻尼比ε=0.14,用它测量频率为400的正弦外力,幅植比ε=0.7时,,又为多少?,相角各为多少?8.某二阶传感器固有频率f0=10KHz,阻尼比ε=0.1若幅度误差小于3%,试求:决定此传感器的工作频率。
9. 某位移传感器,在输入量变化5 mm时,输出电压变化为300 mV,求其灵敏度。
10. 某测量系统由传感器、放大器和记录仪组成,各环节的灵敏度为:S1=0.2mV/℃、S2=2.0V/mV、S3=5.0mm/V,求系统的总的灵敏度。
11.测得某检测装置的一组输入输出数据如下:a)试用最小二乘法拟合直线,求其线性度和灵敏度;b)用C语言编制程序在微机上实现。
12.某温度传感器为时间常数T=3s 的一阶系统,当传感器受突变温度作用后,试求传感器指示出温差的1/3和1/2所需的时间。
13.某传感器为一阶系统,当受阶跃函数作用时,在t=0时,输出为10mV;t→∞时,输出为100mV;在t=5s时,输出为50mV,试求该传感器的时间常数。
14.某一阶压力传感器的时间常数为0.5s,若阶跃压力从25MPa,试求二倍时间常数的压力和2s 后的压力。
15.某压力传感器属于二阶系统,其固有频率为1000Hz,阻尼比为临界值的50%,当500Hz的简谐压力输入后,试求其幅值误差和相位滞后。
传感器与检测技术第3章 传感器基本特性参考答案
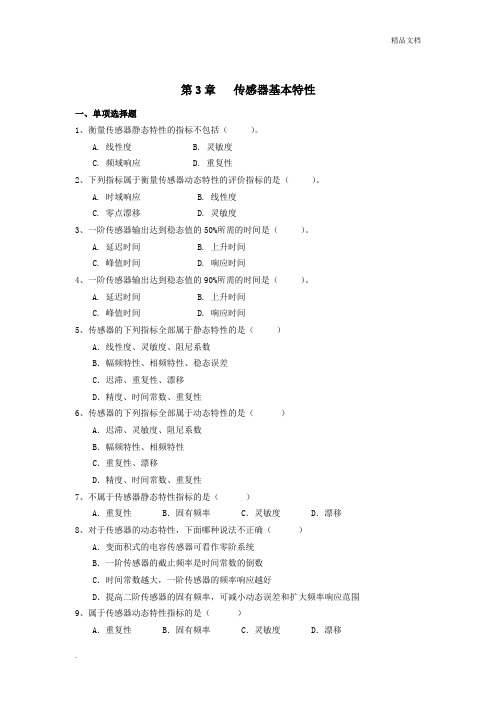
第3章传感器基本特性一、单项选择题1、衡量传感器静态特性的指标不包括()。
A. 线性度B. 灵敏度C. 频域响应D. 重复性2、下列指标属于衡量传感器动态特性的评价指标的是()。
A. 时域响应B. 线性度C. 零点漂移D. 灵敏度3、一阶传感器输出达到稳态值的50%所需的时间是()。
A. 延迟时间B. 上升时间C. 峰值时间D. 响应时间4、一阶传感器输出达到稳态值的90%所需的时间是()。
A. 延迟时间B. 上升时间C. 峰值时间D. 响应时间5、传感器的下列指标全部属于静态特性的是()A.线性度、灵敏度、阻尼系数B.幅频特性、相频特性、稳态误差C.迟滞、重复性、漂移D.精度、时间常数、重复性6、传感器的下列指标全部属于动态特性的是()A.迟滞、灵敏度、阻尼系数B.幅频特性、相频特性C.重复性、漂移D.精度、时间常数、重复性7、不属于传感器静态特性指标的是()A.重复性 B.固有频率 C.灵敏度 D.漂移8、对于传感器的动态特性,下面哪种说法不正确()A.变面积式的电容传感器可看作零阶系统B.一阶传感器的截止频率是时间常数的倒数C.时间常数越大,一阶传感器的频率响应越好D.提高二阶传感器的固有频率,可减小动态误差和扩大频率响应范围9、属于传感器动态特性指标的是()A.重复性 B.固有频率 C.灵敏度 D.漂移10、无论二阶系统的阻尼比如何变化,当它受到的激振力频率等于系统固有频率时,该系统的位移与激振力之间的相位差必为()A. 0°B.90°C.180°D. 在0°和90°之间反复变化的值11、传感器的精度表征了给出值与( )相符合的程度。
A.估计值B.被测值C.相对值D.理论值12、传感器的静态特性,是指当传感器输入、输出不随( )变化时,其输出-输入的特性。
A.时间B.被测量C.环境D.地理位置13、非线性度是测量装置的输出和输入是否保持( )关系的一种度量。
传感器原理与应用课件 第2章 传感器的特性及标定

温度补偿:用于补偿温度对 测量结果的影响
温度校准:用于校准其他传 感器的测量结果
温度监测:用于监测食品、 药品等物品的温度变化
流量传感器应用
工业生产:用于测量液体、气体的流量,如石油、天然气、水等 环保监测:用于监测污水、废气排放,确保环保达标 医疗设备:用于监测血液、尿液等液体的流量,辅助诊断和治疗 汽车电子:用于监测燃油、冷却液等液体的流量,确保车辆正常运行
Part Four
传感器应用实例
压力传感器应用
汽车领域:用于监测轮胎压力、发动机油压等 医疗领域:用于监测血压、呼吸压力等 工业领域:用于监测液压系统、气压系统等 航空航天领域:用于监测飞行器气压、发动机压力等
温度传感器应用
温度报警:用于监测高温、 低温等异常情况
温度控制:用于控制加热、 制冷等设备
标定误差处理:选 择合适的标定方法、 优化标定参数、消 除环境干扰等
标定实例
温度传感器:通过测量温度变化,确定传感器的灵敏度和精度 压力传感器:通过测量压力变化,确定传感器的灵敏度和精度 加速度传感器:通过测量加速度变化,确定传感器的灵敏度和精度 湿度传感器:通过测量湿度变化,确定传感器的灵敏度和精度
位移传感器应用
工业自动化:用于控制机械设备的 位置和速度
汽车电子:用于检测汽车的行驶速 度和位置
添加标题
添加标题
添加标题
添加标题
医疗设备:用于测量患者的生理参 数,如血压、体温等
航空航天:用于测量飞行器的位置 和姿态
THANKS
汇报人:
重复性与灵敏度
重复性:传感器在相同条件下多次测量同一物理量的能力 灵敏度:传感器对被测量变化的响应能力 影响因素:温度、湿度、压力等环境因素 提高方法:选择合适的传感器材料和结构,优化信号处理算法
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x y x x y b n x ( x )
i 2 i
i
1.1.2 迟滞
传感器在正(输入量增大)反(输入量减小) 行程中输出与输入曲线不重合时称为迟滞。迟 滞大小一般由实验方法测得。迟滞误差一般以 满量程输出的百分数表示。
H
1 H max 100% 2 y FS
0.1 100% 100% 0.29% 2*17.15
(2)最小二乘法
例题
y=a+bx,
3 4 5 6 ∑ 2
设拟合直线方程为
序号 1
x
y
0
2.70 0 0
0.02
0.64 0.0004 0.0128
0.04
4.04 0.0016 0.1616
0.06
7.47 0.0036 0.4482
返回
上页
下页
图库
1.1.7 温度稳定性
温度稳定性: 又称为温度漂移。它是指传感器在外界温 度变化情况下输出量发生的变化。 温度稳定性误差:
测试时先将传感器置于一定温度(例如20℃) 下,将其输出调至零点或某一特定点,使温度上 升或下降一定的度数(例如5℃或10℃),再读 出输出值,前后两次输出之差即为温度稳定性误 差。温度稳定性误差用每若干℃的绝对误差或相 对误差表示,每℃的误差又称温度误差系数。
线性度 迟滞 重复性 灵敏度与灵敏度误差 分辨率与阈值 稳定性 温度稳定性 多种抗干扰能力 静态误差
返回 上页 下页 图库
静态特性:
1 m yi ( yui j ydij ),i 1, 2,...n 2m j 1
静态标定---在一定的标准条件下,利用一定的设
2 x i y i xi xi yi
n x
2 i
( xi )
2
所以,拟合直线方程为
y=-2.77+171.5x,
例题
压 力 (MPa) 0 0.02 0.04 0.06 0.08 0.10 标定平均值 (mV) -2.70 0.64 4.04 7.47 10.93 14.45 直线拟合值 (mV) -2.77 0.66 4.09 7.52 10.95 14.38 非线性误差 (mV) 0.07 -0.02 -0.05 -0.05 -0.02 0.07 最大非线性 误差 (mV)
4.11 7.52 10.99 14.46
例题
压 力 (MPa) (设为 x) 0 0.02 0.04 0.06 0.08 0.10
输ቤተ መጻሕፍቲ ባይዱ出 值 (mV) 第一次循环 第二次循环
反行 程 -2.68 0.68 4.09 7.53 10.93 14.47
第三次循环
正行程 反行程 -2.68 0.64 4.03 7.45 10.94 14.46 -2.69 0.69 4.11 7.52 10.99 14.46
y a0 a1 x a2 x2 ... an xn
y――输出量; x ――输入量; a0 ――零点输出; a1 ――理论灵敏度; a2,a3,…,an ――非线性项系数
静态特性曲线需要进行线性化处理
返回 上页 下页 图库
1.1.1 线性度
常用拟和方法 理论拟合 过零旋转拟合 端点拟合
-0.07
所以,最小二乘法所得非线性误差为
L
(yL )max yF . S 0.07 100% 100% 0.41% 171.5(0.1 0)
1.2 传感器的动态特性
研究动态特性可以从时域和频域两个方面采 用瞬态响应法和频率响应法来分析。经常采用的输 入信号为单位阶跃输入量和正弦输入量。
y k x
灵敏度误差
k 100% S k
返回
上页
下页
图库
1.1.5 分辨率与灵敏度误差
分辨率: 传感器能检测到的最小的输入增量。 分辨率可用绝对值表示,也可用与满量程 的百分比表示。 阈值: 在传感器输入零点附近的分辨率。
返回
上页
下页
图库
1.1.6 稳定性
稳定性: 传感器在长时间工作情况是输出量发生的 变化。有时称为长时间工作稳定性或零点漂移。 稳定性误差: 前后两次输出之差。 可用相对误差表示,也可用绝对误差来表 示。
图1-2 迟滞特性
返回 上页 下页 图库
1.1.3 重复性
重复性: 传感器在输入按同一方向作全量程连续多 次变动时所得特性曲线不一致的程度。
Rmax 100% R y FS
图1-3 重复特性
返回 上页 下页 图库
1.1.4 灵敏度与灵敏度误差
静态灵敏度: 传感器输出的变化量与引起该变化量的输 入变化量之比。
0 0.02 -2.73 -2.71 0.56 0.66 0.02 0.10 -2.71 -2.68 0.61 0.68 0.03 0.07 -2.68 0.64 -2.69 0.69 0.01 0.05
0.04
0.06 0.08 0.10
3.96
7.40
4.06
7.49
0.10
0.09 0
H
3.99
返回 上页 下页 图库
1.1.8 多种抗干扰能力
多种抗干扰能力:
传感器对各种外界干扰的抵抗能力。 例如抗冲击和振动能力、抗潮湿的能力、 抗电磁场干扰的能力等,评价这些能力比较复 杂,一般也不易给出数量概念,需要具体问题 具体分析。
返回
上页
下页
图库
1.1.9 静态误差
静态误差: 传感器在其全量程内任一点的输出值与其 理论输出值的偏离程度。 静态误差的求取方法: 把全部校准数据与拟合直线上对应值的残 差,看成随机分布,求出其标准偏差σ,即:
L H R S
2 2 2
2
△yi ― ―各种测试点的残差; n ― ―测试点数。
返回 上页 下页 图库
例题
某压力传感器的校准数据如下表所示,试用端点拟合法求 非线性误差和迟滞误差; 用最小二乘法求非线性误差
输 出 值 (mV) 压 力 (MPa) 0 第一次循环 正行程 -2.73 反行程 -2.71 第二次循环 正行程 -2.71 反行程 -2.68 第三次循环 正行程 -2.68 反行程 -2.69
备对传感器多次反复测试。
静态标定需要条件:
1 对环境的要求
2 对设备的要求---随机误差、系统误差 3 标定过程的要求: 正行程第j次循环i测点(xi, yuij) ; 反行程第j次循环i测点(xi, ydij) x1是被测量的最小值,xn是被测量的最大值
1.1.1 线性度
传感器的输入-输出关系或多或少地都存在 非线性问题。在不考虑迟滞、蠕变等因素的情况 下,其静态特性可用下列多项式代数方程来表示:
动态特性的数学描述 线性系统的传递函数 传感器的动态特性指标 动态响应分析的基本方法 典型环节的动态响应特性
返回 上页 下页 图库
1.2.1 动态特性的数学描述
解析法求解线性系统对激励的响应步骤:
I. 建立描述该系统的数学方程 II. 求满足初始条件的解 将输出量与输入量联系起来的方程是微分方 程,是基本的数学方程;集总参数的线性系统可 用有限阶的线性常系数微分方程来描述:
标定平均值 (mV)
L
(yL )max yF . S
0.12 100% 100% 0.7% 171.5(0.1 0)
求迟滞误差:
例题
输 出 值 (mV) 压 第一次循环 第二次循环 第三次循环 力 (MPa 正行 反行 正行 反行 正行 反行 迟滞 迟滞 迟滞 ) 程 程 程 程 程 程
0.08
10.93 0.0064 0.8744
0.10
14.45 0.01 1.445
0.3
34.83 0.022 2.942
x2 xy
例题
(2)最小二乘法
n xi yi xi yi n xi ( xi )
2 2
b a
171.5(mV / MPa) 2.77(mV )
dny d n1 y dy an n an1 n1 ...a1 a0 y dt dt dt d mx d m1 x dx bm m bm1 m1 ... b1 b0 x dt dt dt
返回 上页 下页 图库
典型传感器的微分方程
a (t) y b x ( t ) (t) y kx ( t ) 0 0 • 零阶
(mV/MPa)
拟合直线方程为: y=2.70+171.5x
求非线性误差:
压 力 (MPa) 0 0.02 0.04 0.06 0.08 0.10 -2.70 0.64 4.04 7.47 10.93 14.45
例题
直线拟合值 (mV) -2.70 0.73 4.16 7.59 11.02 14.45 非线性误差 (mV) 0 -0.09 -0.12 -0.12 -0.09 0
1 n 2 y i n 1 i 1
△yi ― ―各种测试点的残差; n ― ―测试点数。
返回 上页 下页 图库
1.1.9 静态误差
静态误差的求取方法:
取2σ或3σ值即为传感器静态误差。静态误 差也可用相对误差表示,即: 3 100% y FS 静态误差是一项综合性指标,基本上包含 了前面叙述的非线性误差、迟滞误差、重复性误 差、灵敏度误差等。所以也可以把这几个单项误 差综合而得,即:
7.43
4.09
7.53
0.10
0.10 0.0
4.03
7.45
4.11
7.52
0.08
0.07 0.05 0.0