迈克尔逊干涉仪自动测量系统设计
迈克尔逊干涉仪自动计数器的设计
迈克尔逊干涉仪自动计数器的设计迈克尔逊干涉仪是一种常用的光学实验仪器,用于测量光波的干涉现象。
为了提高测量的准确性和效率,设计一种自动计数器来替代传统的手工计数方式,将大大提升实验仪器的使用便捷性和数据采集的精确度。
一、引言迈克尔逊干涉仪是基于干涉原理的光学仪器,通过将光束进行分离再合并,利用干涉条纹的移动来测量波长、折射率等光学参数。
而在传统的使用过程中,人工记录干涉条纹的移动并进行计数,不仅费时费力,还容易出现误差。
因此,设计一种自动计数器来实现干涉仪的自动计数是非常必要的。
二、设计方案为了实现迈克尔逊干涉仪的自动计数,我们可以采用以下设计方案:1. 光学系统设计在设计自动计数器之前,首先需要对传统的迈克尔逊干涉仪进行改进,以适应自动计数器的运行。
例如,可以引入光学衰减器,使得干涉条纹的亮度合适,便于光电二极管的检测和计数。
2. 光电二极管检测自动计数器的核心部分是光电二极管,它能够将光信号转化为电信号,并通过电子元器件进行信号放大和处理。
在迈克尔逊干涉仪中,光电二极管可以采集到干涉条纹的信号,并通过放大电路转换为适合计数的电信号。
3. 计数电路设计自动计数器需要设计合适的计数电路,用于接收光电二极管的信号并进行计数。
计数电路可以根据实际需求选择合适的芯片或模块,如计数器芯片或可编程逻辑器件等。
4. 数码显示为了方便实验人员读取计数结果,可以设计一个数码显示屏,将计数结果以数字形式展示出来。
数码显示屏可以直接与计数电路相连,通过显示驱动电路将计数结果显示出来。
三、工作流程设计完毕后,自动计数器的工作流程如下:1. 设置基准位置对干涉仪进行基准设置,使得初始状态下的干涉条纹处于参考位置。
可以使用调节装置,进行微调和校准,使得干涉条纹清晰可见。
2. 信号采集与处理光电二极管接收干涉条纹的光信号,将其转化为电信号。
这个电信号经过电子元器件的放大和滤波处理,在计数电路中产生可用于计数的脉冲信号。
3. 计数与显示计数电路接收到脉冲信号后,进行计数操作,并将计数结果传递给数码显示屏进行显示。
迈克尔逊干涉仪自动测量系统设计
第29卷第6期2016年12月大学物理实验PHYSICAL EXPERIMENT OF COLLEGEV〇1.29No.6Dec.2016文章编号:1007-2934(2016)06-0069-04迈克尔逊干涉仪自动测量系统设计刘恒洲,喻秋山,胡远强,张剑(长江大学,湖北荆州434023)摘 要:迈克尔逊干涉仪能够演示多种光的波动现象,也在众多的光学领域内有着实际应用。
项目以STC89S52单片机为核心,以步进电机为驱动源,以双PIN光电二极管为光电转换元件,以差动运算放大器OPA129和滞回比较器LM339组成滤波、整形电路,结合多重减震措施,设计出一套迈克尔逊干涉仪自动测量装置。
该装置拥有自动计数和测距的功能,具有交互界面友好、操作简单、测量精准等特点,能适用于各种迈克尔逊干涉仪的应用场合。
关键词:迈克尔逊干涉仪;干涉纹样;自动测量装置;设计中图分类号:O436 文献标志码:A D0l:10.14139/22-1228.2016.006.017迈克尔逊干涉实验能直观地反映光的干涉现 象,是光学经典实验之一。
迈克尔逊干涉仪具有 结构简单、光路清晰、测量精度高等特点,在测量 光波波长、介质折射率、微小位移变化等领域内有 着广泛的应用。
但基于传统迈克尔逊干涉仪的实 验中,需人工对快速“吞/吐”的干涉纹样进行观 察和计数,观测过程中眼睛需长时间紧盯接收屏 上的纹样明暗变化次数,非常容易造成视觉疲劳, 从而漏记或多记条纹移动数量,增大实验误差,且 该操作的简单重复会耗费学生大量的时间和精 力,并降低其对实验原理理解的深入和研究兴趣[1]。
鉴于人工测量方法所带来的诸多不足,我 们以STC89S52单片机为核心研制了一款能够自 动精确检测并记录条纹移动数量、反射镜移动距 离的迈克尔逊干涉实验装置。
该装置不仅可大幅 提高实验效率,还可减少测量误差和提高实验数 据测量精度,有益于学生更好地将重点放在对光 路组成、干涉原理和应用的学习上,加强对光波干 涉条件和形成特性的理解。
基于51单片机的迈克尔逊干涉仪自动检测装置

同 ,或周 吲 环境 光 线强 弱 不 间时 ,为 保 证
光屏 t F 涉 条纹 明暗 变化 能准 确被 光 敏 电 【 一 能I } t卜剧边 境及他 人十 扰 要 1 个 ̄ t s 4 , 阻采 集 ,那 么可 以调 节R1 或R 2 使屏 中干涉 时 以 , 且 ¨ 使 熟 练 人 员 无 卜 扰 删 黢 , 也 需 条纹 明暗 亮度 符 合条件 ,从而 及 时准 确地 小 叫 ;而 盥 测 醚 用时5 分钟 。 同I 1 l J ,
字 求仔储功 能及其它元竹 的功效 ,设讣 电 敏 电阻 电路 ,将 原 本 由人 工 完成 的复杂 繁 用按 键实现数码 管的 h动清零 功能 ,通过程 路完成 r 信 号的采集 、传输 、处理 、显永等 琐的计数 测量 工作 交 由单片机进 行 。 序设计使相应数据鼹永在L C D 液 晶显示屏 } , 功能 ,顷轻 仳携 ,成本较小 ,性价 比尚,可 单片机 … ~ 2 , 作 品硬件结 构与设 计 包括 干涉条纹数 目、动镜移动距 离和所计算 以 泛 刖 于段进现有 的迈 克尔逊 卜 涉 仪装
d【 ( J 1 ] ] a k c L l (f ) r  ̄ o l n L . … t ( 1 e v i c ¨ l 1 1 ]( H ‘ ) 5 1 M( | I … ( ( ) I k ' c l a m( )
e x p e r i me n t a l i nf br ma t i o n. F Or a r t i ic f i a l e xp e r i me nt s ne e d t o c ol l e c t t wo s e t s ofd a t a, de s i  ̄ t he c or r e s p ond i n g S e r l S f ) r de v i c e t O S c t  ̄ s oI " t he s e ha nd c ou nt i ng a n d c a l c L 1 l a t e r c s uI t I 】 v f 『 ' e mi c r o pr oc e s s o r d i r e c dy
迈克尔逊干涉环自动计数装置设计_赵忠伟
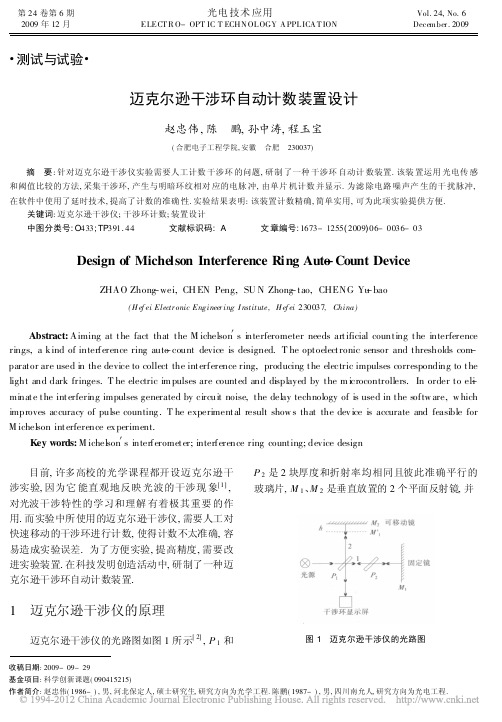
收稿日期:2009-09-29基金项目:科学创新课题(090415215)作者简介:赵忠伟(1986-),男,河北保定人,硕士研究生,研究方向为光学工程.陈鹏(1987-),男,四川南允人,研究方向为光电工程.#测试与试验#迈克尔逊干涉环自动计数装置设计赵忠伟,陈 鹏,孙中涛,程玉宝(合肥电子工程学院,安徽 合肥 230037)摘 要:针对迈克尔逊干涉仪实验需要人工计数干涉环的问题,研制了一种干涉环自动计数装置.该装置运用光电传感和阈值比较的方法,采集干涉环,产生与明暗环纹相对应的电脉冲,由单片机计数并显示.为滤除电路噪声产生的干扰脉冲,在软件中使用了延时技术,提高了计数的准确性.实验结果表明:该装置计数精确,简单实用,可为此项实验提供方便.关键词:迈克尔逊干涉仪;干涉环计数;装置设计中图分类号:O 433;TP 391.44 文献标识码:A 文章编号:1673-1255(2009)06-0036-03Design of Michelson Interference Ring Auto -Count DeviceZHAO Zhong -wei,CH EN Peng,SU N Zhong -tao,CHENG Yu -bao(H ef ei Electr onic Engineer ing I nstitute,H ef ei 230037,China)Abstract:Aiming at the fact that the M ichelson c s interferometer needs artificial counting the interferencerings,a kind of interference ring auto -count device is designed.T he optoelectronic sensor and thresholds com -parator are used in the device to collect the interference ring,producing the electric impulses corresponding to the light and dark fringes.T he electric im pulses are counted and displayed by the m icrocontrollers.In order to el-i minate the interfering impulses generated by circuit noise,the delay technology of is used in the softw are,w hich improves accuracy of pulse counting.T he experimental result show s that the dev ice is accurate and feasible for M ichelson interference ex periment.Key words:M ichelson c s interferometer;interference ring counting;device design 目前,许多高校的光学课程都开设迈克尔逊干涉实验,因为它能直观地反映光波的干涉现象[1],对光波干涉特性的学习和理解有着极其重要的作用.而实验中所使用的迈克尔逊干涉仪,需要人工对快速移动的干涉环进行计数,使得计数不太准确,容易造成实验误差.为了方便实验,提高精度,需要改进实验装置.在科技发明创造活动中,研制了一种迈克尔逊干涉环自动计数装置.1 迈克尔逊干涉仪的原理迈克尔逊干涉仪的光路图如图1所示[2],P 1和P 2是2块厚度和折射率均相同且彼此准确平行的玻璃片,M 1、M 2是垂直放置的2个平面反射镜,并图1 迈克尔逊干涉仪的光路图第24卷第6期2009年12月光电技术应用ELECT R O-OPT IC T ECHN OL OGY A PPL ICA T IONVol.24,No.6December.2009与P 1和P 2成45b 角.来自光源的光波经P 1反射和透射分为1、2两束光,分别经M 1、M 2反射后,在经P 1的反射和透射而共同进入观察系统.观察系统对干涉场调焦,可看到干涉条纹.调节M 2使h 变化.h 增大时,同心圆不断向外扩展,两亮环之间的间隔变小,看上去条纹变细变密;h 减小时,同心圆不断向内收缩,条纹变粗变稀.通过数圆心的亮、暗变化,可得圆环的个数.2 装置设计2.1 硬件设计迈克尔逊干涉环自动计数装置设计框图如图2所示.在迈克尔逊干涉仪产生的圆环中心使用光信号采集电路,将圆环中心的每一次明、暗变化,转换为一个电脉冲信号,输送到单片机AT89S52[3]的中断端口INT 1.由单片机的中断程序滤除抖动(即噪声干扰)后对电脉冲计数,并在数码块上显示.图2 装置设计框图数码显示采用四位七段数码管,由译码器74LS138和三极管控制,进行动态扫描显示.显示的数值为单片机输出的BCD 码,它由74LS47实现BCD-七段显示译码的转换.总体硬件电路原理图如图3所示.圆环中心的明暗变化由光敏电阻[4]来探测,光信号采集电路图如图4所示.圆心亮时,光敏电阻的阻值变小,比较器LM339正输入端的电位变低,小于负输入端的电位,输出低电平;圆心暗时,反之,输出高电平.因此,圆环中心的每一次明暗变化,将被转换为一个电脉冲.通过计数电脉冲,则得到移动的干涉环数.图3 硬件电路原理图图4 信号采集电路图为了方便人机交互,配置了小键盘,实现装置复位、自检、开始计数和设置数值等功能.为简化电路,采用可编程逻辑器件GAL16V8来执行各按键的/与0操作和自检中的逻辑运算.37第6期 赵忠伟等:迈克尔逊干涉环自动计数装置设计2.2 软件编程该装置软件包含自检、计数、显示、键盘响应、数值设置、数值比较、中断处理等子程序.一旦开始计数,当光敏电阻探测到干涉环圆心变亮时,比较器输出低电平,传送到单片机中断INT 1的引脚P3.3上,则产生中断.单片机执行中断子程序,其流程如图5所示.图5 中断处理子程序流程图中断子程序并不是简单地进行脉冲计数,而是采用图5所示的判断)延时)再判断)再延时的流程,滤除背景和电路噪声产生的电脉冲的干扰.具体图6 软件流程框图思路是:当检测到P3.3口输入为低电平时,延时去抖动后仍为低电平,等待P3.3口变为高电平,再经过延时判断,若P3.3口仍为高电平,才确认输入脉冲为有效信号,设置脉冲有效标志,由主程序计数.否则,脉冲无效,认为是噪声干扰,不予计数,直接中断返回,等待下一次中断.延时时间的确定,需要反复实验,是去除干扰的关键所在.一般设为最小脉冲宽度的一半.为了丰富装置的功能,可通过键盘设置该装置的工作模式.一种是直接计数,即正向计数;一种是预先设置计数值,反向计数,一直计到0为止.图6是软件的主流程框图.2.3 实物制作这次创新活动制作的计数装置实物如图7所示,所用的主要电子元器件及其功能见表1.图7 计数装置实物表1 主要元器件清单名称型号作用单片机AT 89S52监控处理四位数码管L ED 显示数据可编程逻辑器件GA L16V 8D 逻辑实现四线七段译码器74L S47段码译码3-8译码器74L S138位码译码比较器L M 339产生脉冲光敏电阻CDS 采集光信号晶振6M工作频率3 实验结果装置使用光敏电阻采集光信号,所以,实验时要求背景光较低.如果在夜晚关灯的情况下进行实验,效果最好.表2是使用本装置进行多次实验后的数(下转第50页)4结束语系统具有质量轻和便携的特点,适合携带和外场测试.采用标准的数据采集模块,具有配置灵活,扩展性好的特点,不仅可以配置各类热电偶传感器,又可通过NI cDAQ9172(带有8个C系列数据采集模块插槽)进行扩展,增加其他的温度采集模块,满足更多通道的温度测试及数据采集的需求.基于系统可实时监测被测对象温度的功能,可加入相应的控制功能,以实现系统的闭环测控,在现有程序基础上,利用LabVIEW可实现快速二次开发集成,极大地提高开发效率,缩短系统的开发周期.参考文献[1]N I92114-Channel T hermocouple Input M odule Operat-ing Instructions And Specifications.[2]杨乐平,李海涛,杨磊.L abV IEW程序设计与应用[M].2版.北京:电子工业出版社,2005.[3]秦树人.虚拟仪器[M].北京:中国计量出版社,2004.[4]黄剑平.基于LabV IEW的激光器斜率效率自动测试系统[J].光电技术应用,2007,22(4):1-4.[5]刘伟,申焱华.基于虚拟仪器的热电偶温度测试与分析系统[J].自动化仪表,2007,28(3):65-69.(上接第38页)据记录.由表2可知:实验装置计数精准,达到了预期效果.表2实验计数比较实验次数12345人工计数1258136170195装置计数001200580136017001954结束语设计的装置不仅可以实现对迈克尔逊干涉环的吞吐移动进行计数,也可以用于斩光器的斩光频率的测定.虽然原理简单,但用途广泛,具有良好的开发价值.参考文献[1]贺秀良.大学基础实验[M].北京:国防工业出版社,2005:240-245.[2]赵凯华,钟锡华.光学[M].北京:北京大学出版社,1982:310.[3]高卫东,辛友顺,韩彦征.51单片机原理与实践[M].北京:北京航空航天大学出版社,2008:118-124. [4]缪家鼎,徐文娟.光电技术[M].杭州:浙江大学出版社,1994:103-111.简讯美国继续发展量子级联激光器美国5西部防务62009年11月10日报道:美国Pranaly-t ica公司赢得美国陆军小型企业技术转让项目合同,继续提高量子级联激光器(Q CL)的性能.Pranaly tica公司是国防高级研究计划局的有效中红外激光器项目的总承包商,该公司在项目第一阶段开发出了功率为3W的室温Q CL,可发出4.6L m的激光.最大电光转换效率可达13%.据Pranalytica公司总裁介绍,其在国防部高级研究计划局的有效中红外激光器项目中将使用最先进的QCL设计和封装工艺,以大大提高Q CL在其他波长的性能.小型企业技术转让项目的最终目标是将Q CL的工作性能从4.6L m扩展到3.5~4.2L m和8~12L m波段.第二阶段目标实现后,将可获得能发出3.8~4.2L m和8~12L m激光的高功率、高效率QCL.主要应用领域包括:自由空间光通信、激光探测和测距、差分吸收激光雷达、远距离气体感知和无创医学诊断.Pranalytica公司近日还推出了一系列高功率全套的室温连续QCL系统(1W、1.5W和2W).这些系统尺寸小、质量轻、功耗低、可靠性好、成本低,可广泛用于各种军用及民用系统中.(徐世录提供)。
迈克耳孙干涉仪自动测量系统设计

1883年,美国物理学家 迈 克 耳 孙 与 莫 雷 合 作 为测量“以 太 ”漂 移 速 度 而 发 明 了 迈 克 耳 孙 干 涉 仪.该 仪 器 利 用 分 振 幅 法 产 生 双 光 束 以 实 现 干 涉,在现 代 物 理 和 计 量 之 中 有 着 广 泛 的 应 用 . [1] 利用迈克耳孙干涉仪测量激光波长是大学物理实 验的重要内容[2].实验中,为 了 计 算 动 镜 的 位 移, 需要在机体侧面 的 毫 米 刻 度 尺、读 数 窗 口 内 的 刻 度盘和微调手轮处 读 数;为 了 获 得 “吞 吐”条 纹 的 数 目,需 要 学 生 长 时 间 盯 着 观 测 屏 进 行 人 工 计 数[3].由于干 涉 图 案 的 亮 度 低,为 看 清 条 纹 的 吞 吐情况,实验需 要 在 黑 暗 环 境 下 进 行 以 降 低 背 景 光的 影 响;但 是,为 了 获 取 动 镜 的 位 移 数 据,读 数 时又 需 要 照 明,学 生 常 用 手 机 照 明.这 2 个 需 求 相 互 矛 盾 ,不 仅 导 致 实 验 过 程 繁 琐 ,而 且 不 同 实 验 台之 间 会 相 互 影 响.此 外,人 工 计 数 需 要 长 时 间 用眼 很 容 易 导 致 视 觉 疲 劳,从 而 导 致 计 数 错 误 . [46]
迈克耳孙干涉仪自动测量系统设计
石明吉,王 飞,王珍桢
(南阳理工学院 电子与电气工程学院,河南 南阳 473004)
摘 要:传统的迈克耳孙干涉仪实验需要人工转动微调 手 轮 使 动 镜 移 动,需 要 人 工 读 数 获 取 动 镜 位 移 信 息,人 工 计 数获取干涉条纹吞吐的数目,不仅容易导致观察者视觉疲劳,而且很容易导致计数 错 误,引 起 较 大 的 实 验 误 差.因 此,本 文设计了基于单片机的迈克耳孙干涉仪自动测量系统,利用直流减速电机带动微调手轮转动使动镜发生位 移;利 用 光 敏 电阻模块将干涉条纹的移动转换为条纹计数脉冲供单片机 计 数 并 显 示;利 用 码 盘 和 红 外 对 射 计 数 传 感 器 模 块 将 微 调 手 轮的转动转换为位移计数脉冲供单片机计数并显示.实验表明:利 用 迈 克 耳 孙 干 涉 仪 自 动 测 量 系 统 测 量 HeNe激 光 波 长 的 相 对 误 差 为 0.21% ,远 小 于 人 工 测 量 的 相 对 误 差 3.0% .
迈克尔逊干涉环纹自动计数系统设计

第33卷第4期大学物理实验Vol.33No.42020年8月PHYSICALEXPERIMENTOFCOLLEGEAug.2020收稿日期:2020 ̄04 ̄23基金项目:江苏省现代教育技术研究2019年度立项课题(2019 ̄R ̄72729)文章编号:1007 ̄2934(2020)04 ̄0024 ̄05迈克尔逊干涉环纹自动计数系统设计吴文娟1ꎬ李致金2(1.南京林业大学理学院ꎬ江苏南京㊀210037ꎻ2.南京信息工程大学人工智能学院ꎬ江苏南京㊀210044)摘要:迈克尔逊干涉实验中ꎬ需对数量众多的干涉环纹进行计数ꎬ人工测量时容易出现错数的情况ꎮ考虑到明暗条纹的色差很大ꎬ可利用色差的变化区别明暗条纹ꎮ本文设计了基于TCS3200D色度传感器的检测方法ꎬTCS3200D将明暗条纹转成频差很大的频率信号ꎬ测试系统检测一定时域内信号频率的变化ꎬ即可自动计数明暗条纹ꎮ该方法设计简单㊁响应快速㊁计数准确ꎮ在大学物理实验中具有一定的实用性ꎮ关键词:迈克尔逊干涉ꎻ条纹计数ꎻTCS3200Dꎻ色差中图分类号:O4 ̄33文献标志码:ADOI:10.14139/j.cnki.cn22 ̄1228.2020.04.006㊀㊀迈克尔逊干涉实验作为一个经典的光学实验ꎬ光路清晰简单ꎬ能够直观的反映光的干涉现象ꎬ并在测量光波长方面具有很高的精确度ꎬ所以很多高校都开设了该实验ꎮ实验中通常要求实验者在光线较暗的环境中连续数几百个 吞 或 吐 的干涉条纹ꎬ每计数50或100个干涉条纹数目ꎬ读一次平面镜位置ꎬ至少读10次ꎮ这样连续数500或1000个条纹ꎬ眼睛极易疲劳ꎬ容易数错ꎮ目前ꎬ针对迈克尔逊干涉实验手动计数的不足ꎬ文献[1 ̄5]设计了基于光敏电阻的迈克尔逊干涉条纹自动计数系统ꎮ迈克尔逊干涉明暗纹引起光敏电阻阻值的变化ꎬ光敏电阻阻值变化转换成电压变化ꎬ系统对电压信号进行模数(A/D)转换ꎬ从而测出明暗条纹ꎬ并自动计数ꎮ光敏电阻阻值变化有一定的响应时间ꎬ当手轮转动速度较快时ꎬ就会影响测量的精度ꎮ实验中条纹明暗变化是连续的ꎬ也就是光敏电阻阻值变化是连续的ꎬ判断明暗条纹的电阻阈值很难确定ꎬ同时光敏电阻阻值随温度变化也会变化ꎬ因此ꎬ该系统在实用中有一定的局限性ꎮ文献[6]设计了采用光电二极管检测迈克尔逊明暗条纹ꎬ该系统明暗条纹的电阻阈值很难确定ꎬ因此ꎬ实际使用中还是有局限性ꎮ文献[7]基于面阵CCD摄像头迈克尔逊干涉环自动计数系统ꎬ文献[8]设计了基于PASCO科学工作室和MATLAB编程法实现迈克尔逊干涉条纹的计数ꎬ系统设计成本高ꎬ操作麻烦ꎬ实用性不强ꎮ本文考虑到迈克尔逊干涉实验中ꎬ以发射红光的He ̄Ne激光器为光源ꎬ干涉环纹为红黑相间的条纹ꎬ接收屏上光强发生明暗交替变化时ꎬ对应红黑颜色交替变化ꎮ因此可以把颜色传感器作为探测器ꎬ将圆心处的明暗条纹变化转换成脉冲信号来记录条纹数量的变化ꎮ1㊀迈克尔逊干涉仪实验原理迈克尔逊干涉仪的光路如图1所示ꎮ以He ̄Ne激光器为光源发射出红色激光ꎬ光束照射到下表面镀了半透半反射膜的分化板G1上被分成了光强近似相等的反射光和透射光ꎬ它们分别射向平面镜M1和M2并被反射回来ꎬ在光屏E处相遇发生干涉ꎬ形成明暗(红黑)相间的环形条纹(如图2)ꎮ图1 迈克尔干涉仪的光路图转动微调螺旋调节M2的位置使d变化ꎬ光屏上就不断 吞吐 出明暗环纹ꎮ干涉条纹圆心的光程差近似等于2dꎬ当d逐渐增加时ꎬ干涉圆环一个个从中心向外冒出ꎻ当d逐渐减小时ꎬ干涉条纹在圆心处一个个逐渐减小直到消失ꎮ从数量上看ꎬ如果d减小或增加半个波长时ꎬ光程差就减少或增加一个整波长λꎬ对应的就有一个圆环条纹在中心 消失 或在中心 冒出 ꎬ在实验中数出变化的条纹个数N并读出M2的位置变化量Δdꎬ就可以求出光波波长:λ=2Δd/N.图2㊀干涉环纹2㊀自动计数系统设计根据迈克尔逊干涉的实验原理ꎬ以发射红光的He ̄Ne激光器为光源ꎬ转动迈克尔逊干涉仪的微调旋钮时ꎬ接收屏上会有明暗相间的条纹变化ꎬ条纹圆心处光强也是明暗交替变化的ꎬ明暗变化一个周期ꎬ对应颜色红黑变化一个周期ꎬ正好对应条纹的一次 吞 或 吐 ꎮ因此可以把颜色传感器作为探测器ꎬ将圆心处的明暗条纹变化转换成脉冲信号ꎬ这样可以记录条纹数ꎮ我们设计的装置系统包括:(1)TCS3200D颜色传感器数据采集电路ꎻ(2)12864液晶显示电路ꎻ(3)与上位机通信电路ꎻ(4)键盘控制电路ꎻ(5)上位机管理软件ꎮ系统设计框图如图3所示ꎮ图3㊀系统设计框图本系统采用新唐N76E616微控制器为主控芯片ꎮN76E616提供丰富的外设ꎬ两个16位定时/计时器ꎬ多个I/O口ꎬ最大180段的LCD驱动ꎬ两个全双工的UARTꎮ2.1㊀TCS3200D颜色传感器[9]TCS3200D是一款全彩的颜色检测器ꎬ能在一定范围内检测和测量几乎所有的可见光ꎮ通常所看到的物体颜色ꎬ实际上是物体表面吸收了照射在它上面的白光(日光)中的一部分有色成分ꎬ各种颜色是由不同三原色(红㊁绿㊁蓝)混合而成的ꎮ对于TCS3200D来说ꎬ选定一个颜色滤波时ꎬ它只允许某种特定的原色通过ꎬ阻止其他原色的通过ꎮ迈克尔逊干涉条纹实验中ꎬ亮条纹为红光ꎬ暗条纹为黑色ꎮ本系统设计时选择红色滤波器时ꎬ入射光中只有红色可以通过ꎬ蓝色和绿色都被阻止ꎬ这样就可以得到红色光的光强ꎬ即可记取亮条纹ꎮTCS3200D传感器有红绿蓝和清除4种滤光器ꎬ可通过其引脚S2和S3的高低电平来选择滤波器模式ꎬ如表1所示ꎮ本系统中设置S2S3=00ꎬ迈克尔逊条纹明条纹红色光通过ꎬ其余光滤除ꎮ表1㊀TCS3200D滤光设置表S2S3PHOTODIODETYPELLRedLHBlueHLClear(nofilter)HHGreenTCS3200D设计有可编程的彩色光到电信号频率转换器ꎬ当被检测物光源通过相应的滤波器达到TCS3200D感光芯片上ꎬ其内置的振荡器输出方波信号ꎬ方波频率与所感应的光强成正比例关系ꎬ光强越强ꎬ方波频率越高ꎮ在迈克尔逊实验中ꎬ亮条纹和暗条纹的光强相差很大ꎬ因此在记取亮条纹和暗条纹数据时ꎬ可以轻松确定阈值ꎬ确保检测数据的正确性ꎮTCS3200D传感器设计有一个OUT引脚ꎬOUT引脚输出的方波信号频率与内置的振荡器的频率也成正比ꎬ其比例因子可以通过传感器的S0和S1引脚设置ꎬ设置关系如表2所示ꎮ本系统中设置S0S1=11ꎬ取全频率ꎮ表2㊀TCS3200D输出频率表S0S1OUTPUTFREQUENCYSCALING(f0)LLPowerdownLH2%HL20%HH100%TCS3200D与主控芯片控制电路如图4所示ꎮOE为TCS3200D输出使能端ꎬ低电平有效ꎮOUT52迈克尔逊干涉环纹自动计数系统设计为TCS3200D脉冲输出端ꎬ接N76E616的16位计数器0端ꎮ2.2㊀显示电路本系统为显示检测到的条纹数目ꎬ设计有LCD显示电路ꎮLCD仅显示明条纹的数目ꎬ采用12864液晶显示模组ꎬ驱动简单ꎮ显示电路如图4所示ꎮ图4㊀TCS3200D与主控系统接口图2.3㊀通信电路本系统设计有LCD显示电路外ꎬ还设计有与上位机通信电路ꎮ主控系统采集迈克尔逊明条纹数目ꎬ在LCD上显示ꎬ同时还将相关数据打包通过串口发送至上位机管理系统中ꎮ通信电路如图5所示ꎮ图5㊀与上位机串口通信电路本系统采用CH340G实现与上位机的RS232通信ꎬ通信的数据格式为:波特率为9600ꎬ8位数据发送ꎬ1停止位ꎬ无校验ꎮ3㊀条纹检测原理本系统设计中设置仅让红光通过ꎬ滤除其余色光ꎮ而在实际测试中ꎬ因环境白光的射入ꎬ会影响明暗条纹阈值的判断ꎬ因此在实用前ꎬ需要对系统白光进行校准ꎮ3.1㊀系统校准白光平衡就是告诉系统什么是白色ꎬ即当前实用环境中红㊁绿㊁蓝三原色光的比重ꎮ从理论上讲ꎬ白色是由等量的红色㊁绿色和蓝色混合而成的ꎮ实际上ꎬ由于实验室环境中光源的影响ꎬ白色中的三原色并不完全相等ꎮ对于TCS320D的光传感器来说ꎬ它对这三种基本色的敏感性是不相同的ꎬ导致TCS320D的RGB输出并不相等ꎬ因此在测试的RGB输出并不相等ꎬ因此在测试前进行白光调整ꎮ白光平衡的校正方法是:把一个白色物体放置在TCS320D颜色传感器之下ꎬ两者相距10mm左右ꎬ点亮传感器上的4个白色LED灯ꎬ用N76E616控制器的定时器设置一个固定时间62迈克尔逊干涉环纹自动计数系统设计1sꎬ然后选通R㊁G㊁B三原色的滤波器ꎬ让检测光中的红㊁绿㊁蓝三色光分别通过滤波器ꎬ计算1s内三色光对应的TCS320D传感器OUT引脚输出信号脉冲数ꎮ系统存储三原色的脉冲数ꎬ再通过正式算式得到三色光的比例因子ꎬ换算出被测光的RGB标准值ꎮ3.2㊀测量原理测量时ꎬ将TCS320D颜色传感器对准被测条纹出现位置ꎮ本系统为迈克尔逊光斑ꎬ迈克尔逊的光斑为红色和黑色ꎮ当系统的计数器0接口检测TCS320D传感器输出端口ꎬ输出信号的频率ꎮ当信号频率达到红光的频率阈值时ꎬ即确定检测到红色光斑ꎬ系统计数器加1ꎮ系统在12864液晶模组上显示明条纹的数目ꎮ4㊀系统软件系统软件包括下位机N76E616控制软件和上位机管理软件ꎮ上位机管理软件本文不做介绍ꎮ下位机N76E616控制程序包括:(1)液晶驱动程序ꎻ(2)键盘扫描程序ꎻ(3)白光校准程序ꎻ(4)红条纹计数程序ꎻ(5)与上位机通信程序ꎮ本文仅简单介绍白光校准程序和红条纹计数程序ꎮ4.1㊀白光校准程序按下校准键ꎬ系统进入白光校准程序ꎬ程序流程图如图6所示ꎮ4.2㊀计数程序校准后系统进入测量模式ꎮ测量时ꎬ系统开始100ms定时器1ꎬ同时打开计数器0ꎬ开始计数输入脉冲ꎮ在100ms时间阈值内测量脉冲数为Mꎬ系统比较M和红光标准脉冲阈值MRꎮ当M<MR时ꎬ表示检测到暗条纹黑斑ꎬ暗条纹标志BLACK置1ꎬ明条纹标志LIGHT置0ꎬ条纹计数器数据不变ꎮ当M>MR时ꎬ表示检测到明条纹红斑ꎬ明条纹标志LIGHT置1ꎬ暗条纹标志BLACK置0ꎮ系统自动进入下100ms采样程序ꎬ检测输入脉冲为Mꎬ当M>MR时ꎬ表明检测到明条纹ꎬ同时读取明条纹标志ꎬ如果明条纹标志为0ꎬ表明条纹由暗变明ꎬ明条纹计数器自动加1ꎻ如果明条纹标志为1ꎬ表明迈克尔逊条纹未发生ꎬ明条纹计数器不加1ꎬ条纹数据不变ꎮ计数程序流程图如图7所示ꎮ图6㊀白光校准流程图图7㊀明条纹计数程序流程图5㊀结㊀论目前迈克尔逊干涉条纹自动计数系统一般采用光敏电阻或CCD摄像头的方法检测明暗条纹的变化ꎮ光敏电阻方法存在两点不足:(1)响应速度慢ꎻ(2)判断阈值受环境影响较大ꎮ采用72迈克尔逊干涉环纹自动计数系统设计CCD摄像头作为明暗条纹检测传感器ꎬ设计复杂成本太高ꎮ本文设计基于TCS320D颜色传感器的迈克尔逊干涉条纹计数系统ꎬ设计简单㊁响应快速ꎬ可很好地对迈克尔逊干涉条纹计数ꎮ同时本系统还设计了和上位机通信电路ꎬ以便将实验中测量的数据传输至上位机系统中ꎬ实现实验数据的集中化管理ꎮ参考文献:[1]㊀彭琴ꎬ方旺ꎬ杨晓卫ꎬ等.新型干涉条纹计数器的设计与应用[J].大学物理实验ꎬ2014ꎬ12:90 ̄92. [2]㊀陈业仙ꎬ周党培ꎬ关小泉ꎬ等.一种新型迈克尔逊干涉仪条纹计数器的设计[J].大学物理实验ꎬ2009ꎬ22(3):64 ̄67.[3]㊀赵忠伟ꎬ陈鹏ꎬ孙中涛ꎬ等.迈克尔逊干涉环自动计数装置设计[J].光电技术应用ꎬ2009(12):36 ̄39.[4]㊀周党培ꎬ关小泉ꎬ伍广胜ꎬ等.一种新型迈克尔逊干涉仪条纹计数器的设计[J].光学仪器ꎬ2009ꎬ6:58 ̄60.[5]㊀石明吉ꎬ刘斌.新型迈克尔逊干涉条纹测控装置研制[J].自动化仪表ꎬ2018ꎬ9:14 ̄16.[6]㊀刘恒洲ꎬ喻秋山ꎬ胡远强ꎬ等.迈克尔逊干涉仪自动测量系统设计[J].大学物理实验ꎬ2016ꎬ12:69 ̄72. [7]㊀黄煜ꎬ黄文艳ꎬ张婉柔ꎬ等.基于面阵CCD的迈克尔逊干涉环计数方法[J].计算机工程与应用ꎬ2015ꎬ51(9):180 ̄184.[8]㊀赵伟ꎬ陈伟杰ꎬ陈仁安ꎬ等.一种基于PASCO和Matlab的干涉条纹计数方法[J].实验室研究与探索ꎬ2014ꎬ7:53 ̄55.[9]㊀李致金ꎬ吴文娟.基于MSP430微控制器的带USB通信的颜色识别系统[J].电子技术应用ꎬ2009ꎬ8:52 ̄55.DesignofMichelsonInterferenceRingAutomaticCountingSystemWUWenjuan1ꎬLIZhijin2(1.CollegeofScienceꎬNanjingForestryUniversityꎬNanjing210037ꎬChinaꎻ2.SchoolofArtificialIntelligenceꎬNanjingUniversityofInformationScience&TechnologyꎬNanjing210044ꎬChina)Abstract:InMichelson ̄Morleyinterferedexperimentꎬitisnecessarytocountalargenumberofinterferenceringsꎬanditiseasytohavewrongnumberinmanualmeasurement.Asthecolordifferenceofbrightanddarkstripesisverybigꎬthechangeofcolordifferencecanbeusedtodistinguishthebrightandthedarkones.AdetectionmethodbasedonTCS3200Dchromaticitysensorisdesigned.TCS3200Dconvertsbrightanddarkstripesintoafrequencysignalwithalargefrequencydifferenceꎬandthetestsystemdetectsthechangeofsignalfrequencyinacertaintimedomaintocountbrightanddarkstripesautomatically.Themethodissimpleindesignꎬfastinresponseandaccurateincounting.Itispracticalinuniversityphysicsexperiment.Keywords:MichelsoninterferenceꎻinterferenceringcountingꎻTCS3200Dꎻcolordifference82迈克尔逊干涉环纹自动计数系统设计。
基于迈克尔逊干涉仪的激光CCD微位移测量系统研究
频信 号的高速 动态采集 系统 、 微机处理 系统及干涉 图处 理软件包等 , 基于位相调制的基本原理, 实现 了微位 移的精 确测量。与 传统测量方法相比, 其精度 、 误差、 灵敏度及稳定度都有较大提高 , 并实现 了微位移 的全 自动测量。
关键词
线阵 C D C
位相调制
迈克尔逊 干涉仪
度 和系统 的稳定性 , 并基 本 消除 了人 为 的计数误差 。
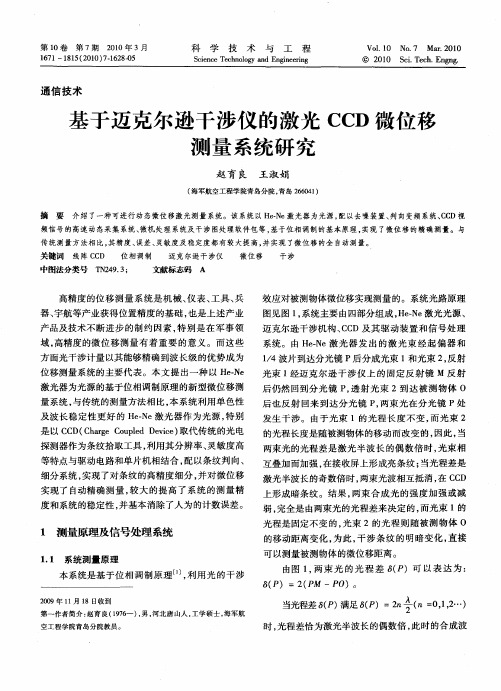
两束 光 的光 程 差是 激 光 半波 长 的偶 数 倍 时 , 束相 光
互叠 加而加 强 , 接收屏 上形 成亮条 纹 ; 在 当光 程差 是 激光 半波 长的奇数 倍 时 , 两束光 波相互 抵 消 , C D 在 C 上形 成 暗条 纹 。结 果 , 束合 成 光 的强 度加 强 或 减 两 弱, 完全是 由两束 光 的光程差 来决 定 的 , 而光 束 1的 光程 是 固定不 变 的 , 光束 2的光 程 则 随被 测 物体 0
光 束 1 迈 克尔 逊 干 涉 仪 上 的 固定 反 射 镜 M 反 射 经
位移测 量系统 的主 要代 表 。本 文 提 出一 种 以 H -e eN
激光器为光源的基于位相调制原理的新型微位移测
量系统 , 与传统 的测 量方 法相 比 , 系统利 用 单色性 本
及波 长稳 定 性更 好 的 H - e激 光器 作 为 光源 , 别 eN 特
第 1 O卷
第 7期
2 1 3月 00年
科
学
技
术
与
工
程
Vo_ 0 No 7 M f. 01 ll . i 2 0 r @ 2 0 S iT c . g g 01 c. e h En n .
17 —11 (00 712 -5 6 1 85 2 1 ) -6 8 0
基于迈克尔孙干涉仪的光波长自动测量系统

第39卷第8期大 学 物 理Vol.39No.82020年8月COLLEGE PHYSICSAug.2020 收稿日期:2019-10-25;修回日期:2019-12-17 作者简介:党晨(1990—),男,陕西西安人,西安工业大学理学院工程师,硕士,主要从事光电检测研究工作.基于迈克尔孙干涉仪的光波长自动测量系统党 晨,李武军,王党社(西安工业大学理学院,陕西西安 710021)摘要:本文基于迈克尔孙干涉仪,设计了一套自动测量光波波长的系统;其包括一套磁吸式传动装置,光强自动检测模块,系统具有自动寻峰功能,实现了数据的实时处理与显示.磁吸式传动装置,解决了电机转轴与干涉仪手轮不同轴的问题,减小了电机抖动,利用单片机驱动步进电机转动干涉仪的手轮,实时记录干涉光强变化的波形,通过算法减少了仪器抖动带来的干扰,实现了光波波长的自动测量,减小了实验误差,利用显示屏实时显示实验数据,使用步进电机步进角度记录反射镜位移值,自动计算数据结果,使实验更加直观简便.关键词:迈克尔孙干涉仪;磁力传动;自动寻峰;波长计算中图分类号:O4-33 文献标识码:A 文章编号:1000 0712(2020)08 0031 04【DOI】10.16854/j.cnki.1000 0712.190477迈克尔孙干涉仪是一种分振幅双光束干涉仪器,是许多近代干涉仪的原形,其可用于观察光的等厚、等倾干涉,测量光波波长、薄膜厚度以及空气折射率等,是大学物理实验中必不可少的一种仪器[1].通过观察光路与调节干涉仪,可使学生了解光干涉的形成以及干涉光场的特征.在迈克尔孙干涉仪测量He-Ne激光波长的实验中,波长与迈克尔孙干涉仪“动镜”移动距离Δd的关系为Δd=Δkλ2(1)其中Δk为干涉圆环中心处“陷”进或“涌”出干涉环的个数,通过测量Δd与Δk即可计算出激光波长.实际测量中需手动转动干涉仪的手轮以改变“动镜”位置,人眼观察光屏上干涉圆环数目的变化,由此易产生实验误差,重复测量可导致视觉疲劳[2].基于以上问题,本文采用光敏电阻探测干涉图样中心处的光强变化,基于Arduino单片机设计了自动寻峰程序及滤波程序,可准确测量出光波波长的重复周期数Δk,设计了一套磁吸式传动装置,采用步进电机驱动磁力转子,并以此带动手轮转动,降低仪器的抖动.根据电机的步进数则可计算出相应的Δd,由此可自动计算出光波波长.1 装置的硬件设计自动测量装置主要由以下3部分构成:1)光强探测装置,用于安装探测器,屏蔽背景光,其替代了观察屏.2)步进电机的支撑结构,用于固定步进电机,支撑磁力转子.3)干涉仪手轮的磁力传动装置,包括手轮转子与磁力转子.光强探测装置主要由以下四部分构成,如图1所示,其中(a)为探测器安装结构,中心处安装光敏电阻,并留有通孔便于连接导线,背部开孔安装磁铁;(b)为探测器支撑结构用于替代观测屏,其中支撑杆中心有通孔以穿过导线;(c)为探测器调整装置,正面开孔安装磁铁,可将探测器结构吸附在(b)图1 光强探测装置32 大 学 物 理 第39卷上;(d)为遮光筒,用以屏蔽背景光,遮光筒直径为72mm与光屏直径相同,长度为100mm即光屏到粗调手轮的距离,(b)与(d)可嵌套安装.该结构有以下特点:1)当调整出干涉圆环时,可通过移动(c)的位置,带动吸附在(b)另一侧的探测器的位置,从而快速将探测器移动至干涉光斑中心处.2)遮光筒可拆卸,便于观察调整干涉图样.3)当探测器位于遮光筒中心处时,可保证大于20°入射角的光线无法直接射入到探测器面上,有助于屏蔽背景光干扰,即arctan36100=19°47′.步进电机的支撑结构,如图2所示,其中对称的支柱用于固定电机位置,底座中的凹字型结构用于支撑电机,开孔部分便于连线,大圆环直径为41mm,长度为10mm,用以支撑磁力转子.干涉仪手轮的磁力传动装置,包括手轮转子与磁力转子,如图3所示,(a)为手轮转子,外径为30mm,其中圆柱形开孔内部对称分布四个磁铁开孔,另一面开孔并与干涉仪手轮嵌套;(b)为磁力转子,其内径为40mm,外部正交对称分布四个磁铁开孔.图3(c)所示,手轮转子中4个方向上的磁铁与磁力转子4个方向上的磁铁分别异性相吸,当磁力转子在步进电机的带动下转动时,磁力将带动手轮转子同步转动.图2 步进电机的支撑结构该结构使用磁力驱动手轮,避免了电机转轴与手轮轴心不同轴所引起的振动,非接触式传动在调整时,仅需从磁力转子后方十字开孔处观察手轮转子位置,两者接近同轴即可,该结构具有稳定性强,调整简单的特点.机械结构总示意图如图4所示,所有结构采用3D打印机构造,实际打印结构如图5所示,打印层精度为0.02mm,其中遮光筒部分进行黑色颜料喷涂,以提高遮光效果.图3 磁力传动装置图4 机械结构示意图图5 3D打印结构2 自动测量程序设计系统采用光敏电阻作为光强探测器件,当光强变化时光敏电阻的阻值随之发生变化,探测电路采用5V直流稳压电源供电,将光敏电阻与分压电阻串联,检测光敏电阻两端电压变化值,即可获得干涉光光强的变化值.使用Arduino101单片机中10位精度ADC输入第8期 党 晨,等:基于迈克尔孙干涉仪的光波长自动测量系统33 端口采集电压信号变化值[3],通过IO口控制L298N电机驱动模块,进而驱动步进电机转动,完成电压信号的自动测量,探测电压随时间变化的波形图如图6所示,其中波峰对应亮斑个数.通过步进电机的步进角数则可计算出动镜的移动距离Δd,系统根据实际测量的干涉亮斑个数与步进电机移动距离所计算出的干涉光斑个数进行对比,计算误差及光波波长.图6 探测电压随时间变化的波形图波峰个数的准确测量对光波波长的计算极为关键,为了进一步减少探测电压值的随机波动,首先对采集的电压数据进行滑动均值滤波,将连续采集的N个电压值放在数组中,并对数组求平均值,之后每次采样得到一个新数据即放到数组末尾,并丢掉数组起始位置的数据,依次求数组的均值,即获得到滤波结果.当探测程序开始运行时,其运行逻辑如图7所示,通过外部中断选择驱动模式:1)步进电机正转检测,2)步进电机反转复位,通过两种模式可以实现多次重复测量,避免光路的二次调整.当步进电机顺时针“正转”时,ADC芯片开始实时采集探测电压值,为了排除空程并采集信号电压的峰值Vmax与谷值Vmin,需在正式探测前进行一段“预测量”,确定探测电压的变化区间范围H[4],如图8所示,分别对波峰、波谷的探测电压极值进行数目统计,其基本符合正态分布,选取统计次数最多的探测电压值作为Vmax与Vmin.H=Vmax-Vmin(2)故上行区间Vmax与下行区间Vdown分别可以表示为Vmax-CH≤Vup≤VmaxVmin≤Vdown≤Vmin+CH{(3)其中C为系数,实验中常取3/8较为合理.当预测量结束且探测电压值进入Vdown区间后,正式测量开始,设上行区间与下行区间计数变量为i,j,当信号电压值在Vdown区间内,则变量j进行自加运算,表示探测电压值运行在下行区间内,同理当信号电压值在Vup区间内,变量i进行自加运算.当两个变量值都大于常数N,既可认为已经探测到一个波峰,此时将变量i、j清零并继续进行判断,根据单片机采集数据的速度,实验常取N≥10,这种波峰计数方法减少了因随机噪声而引起的误检.图7 探测程序运行逻辑框图图8 探测波形的峰谷电压值统计图当测量结束,可以根据步进电机运行的步进角度计算出移动反射镜的位移Δd,并根据式1计算波峰个数Δk,对比系统所检测出的波峰个数,即可求出波长及其误差.3 实验数据测量及误差分析本文采用LCD1602作为显示屏幕,第一行实时显示以电机步进角度所计算出的光波波长个数,第二行实时显示由探测系统所检测到的波长个数.其他硬件结构包括:12V/5V双路稳压开关电源,4相5线减速步进电机,L298N电机驱动模块以及矩阵键盘等,探测系统样机如图9所示.34 大 学 物 理 第39卷图9 探测系统样机实验数据如表1所示,分别以波长个数30、50、100为例进行等精度测量,重复测量5次,计算光波波长及平均误差.表1 探测实验数据次数Δk 12345λ/mmEr30632.8612.4654.6632.8654.6637.41.2%50632.8632.8620.4632.8654.7632.80.9%100632.8639.2632.8645.7626.5635.30.5%根据实验数据可知,当测量光斑个数较少时,所计算出的波长误差较大,当测量光斑个数较多时,则误差明显减少,多次测量求平均值则可进一步减小误差,探测系统的实验误差主要来自于外界环境振动所引起的光斑模糊,磁力转子与手轮转子的中心转轴夹角过大,从而导致反射镜位移不均匀,使光斑变化过快而系统误检.4 结论本系统解决了以往测量系统要求电机转轴与手轮必须同轴的问题,减小了实验误差,设计了自动寻峰程序,通过步进电机角度提供“动镜”位移量,无须人工读数,使实验操作更加便捷,测量结果准确可靠.参考文献:[1] 何春娟,李武军.大学物理实验教程[M].西北工业大学出版社,2004.[2] 左安友,楚亮,熊小勇,等.GSZF-4型迈克耳孙干涉仪传动装置的改进[J].大学物理,2007(11):47 55.[3] 杨振乾,张旭东,王子城,等.基于Arduino单片机的迈克尔孙干涉仪测量改进[J].实验室研究与探索,2016(1):50 53.[4] 宾峰,邓敏,唐付桥,等.迈克尔孙干涉条纹自动测量方法[J].光学与光电技术,2015,13(4):36 40.AutomaticmeasurementsystemofopticalwavelengthbasedonMichelsoninterferometerDANGChen,LIWu jun,WANGDang she(CollegeofScience,Xi’anTechnologicalUniversity,Xi’an,Shaanxi710021,China)Abstract:Inthispaper,basedonMichelsoninterferometer,asetofautomaticmeasurementsystemoflight wavewavelengthisdesigned,whichincludesasetofmagneticdrivedevice,lightintensityautomaticdetectionmodule,andthesystemhasthefunctionoffindingpeakautomatically,sothereal-timeprocessinganddisplayofdataarerealized.Themagneticsuctiontransmissionsolvestheproblemofthedifferencebetweentheaxesofthemo torrotatingshaftandtheinterferometerhandwheel,reducesthemotorjitter,usesthesinglechipmicrocomputertodrivethesteppingmotortorotatethehandwheeloftheinterferometer,recordsthewaveformoftheinterferencelightintensitychangeinrealtime,reducestheinterferencecausedbytheinstrumentjitterthroughthealgorithm,realizestheautomaticmeasurementoflightwavewavelength,reducestheexperimentalerror,andusesthedisplayscreentodisplaytheexperimentaldatainrealtime.Thestepangleofthesteppermotorisusedtorecordthedis placementvalueofthemirror,andthedataresultsarecalculatedautomatically,whichmakestheexperimentmoreintuitiveandsimple.Keywords:Michelsoninterferometer;magnetictransmission;automaticpeakfinding;wavelengthcalculation。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
迈克尔逊干涉仪自动测量系统设计刘恒洲;喻秋山;胡远强;张剑【摘要】迈克尔逊干涉仪能够演示多种光的波动现象,也在众多的光学领域内有着实际应用。
项目以STC89S52单片机为核心,以步进电机为驱动源,以双PIN 光电二极管为光电转换元件,以差动运算放大器OPA129和滞回比较器LM339组成滤波、整形电路,结合多重减震措施,设计出一套迈克尔逊干涉仪自动测量装置。
该装置拥有自动计数和测距的功能,具有交互界面友好、操作简单、测量精准等特点,能适用于各种迈克尔逊干涉仪的应用场合。
%Michelson interferometer can demonstrate a variety of light wave phenomenon,but also has a practi-cal application in a large number of optical fields.Project to STC89S52 SCM as the core,the stepper motor as the driving source,the double PIN photodiode for photoelectric conversion element,differential operational am-plifier OPA129 and lag back comparator LM339 filtering, shaping circuit, combined with multiple damping measures,designs a set of Michelson interferometer automatic measuring device.The device has the function of automatic counting and ranging,and has the characteristics of friendly interface,simple operation and accurate measurement.It can be applied to various applications of Michelson interferometer.【期刊名称】《大学物理实验》【年(卷),期】2016(029)006【总页数】5页(P69-72,75)【关键词】迈克尔逊干涉仪;干涉纹样;自动测量装置;设计【作者】刘恒洲;喻秋山;胡远强;张剑【作者单位】长江大学,湖北荆州 434023;长江大学,湖北荆州 434023;长江大学,湖北荆州 434023;长江大学,湖北荆州 434023【正文语种】中文【中图分类】O436迈克尔逊干涉实验能直观地反映光的干涉现象,是光学经典实验之一。
迈克尔逊干涉仪具有结构简单、光路清晰、测量精度高等特点,在测量光波波长、介质折射率、微小位移变化等领域内有着广泛的应用。
但基于传统迈克尔逊干涉仪的实验中,需人工对快速“吞/吐”的干涉纹样进行观察和计数,观测过程中眼睛需长时间紧盯接收屏上的纹样明暗变化次数,非常容易造成视觉疲劳,从而漏记或多记条纹移动数量,增大实验误差,且该操作的简单重复会耗费学生大量的时间和精力,并降低其对实验原理理解的深入和研究兴趣[1]。
鉴于人工测量方法所带来的诸多不足,我们以STC89S52单片机为核心研制了一款能够自动精确检测并记录条纹移动数量、反射镜移动距离的迈克尔逊干涉实验装置。
该装置不仅可大幅提高实验效率,还可减少测量误差和提高实验数据测量精度,有益于学生更好地将重点放在对光路组成、干涉原理和应用的学习上,加强对光波干涉条件和形成特性的理解。
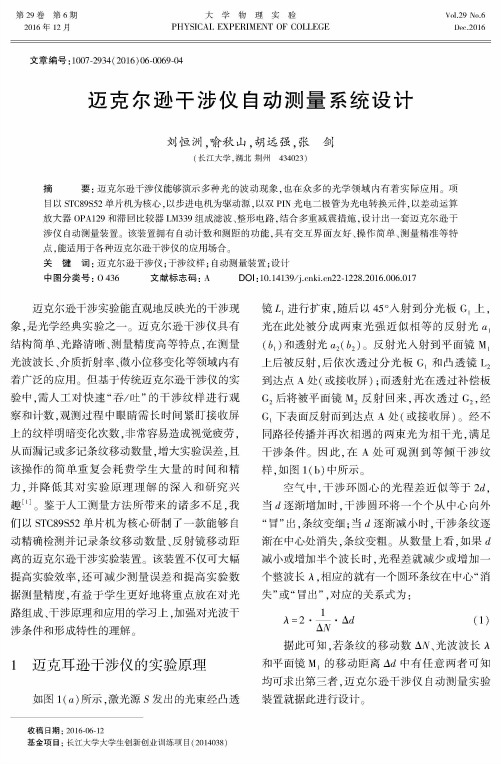
如图1(a)所示,激光源S发出的光束经凸透镜L1进行扩束,随后以45°入射到分光板G1上,光在此处被分成两束光强近似相等的反射光a1(b1)和透射光a2(b2)。
反射光入射到平面镜M1上后被反射,后依次透过分光板G1和凸透镜L2到达点A处(或接收屏);而透射光在透过补偿板G2后将被平面镜M2反射回来,再次透过G2,经G1下表面反射而到达点A处(或接收屏)。
经不同路径传播并再次相遇的两束光为相干光,满足干涉条件。
因此,在A处可观测到等倾干涉纹样,如图1(b)中所示。
空气中,干涉环圆心的光程差近似等于2d,当d逐渐增加时,干涉圆环将一个个从中心向外“冒”出,条纹变细;当d逐渐减小时,干涉条纹逐渐在中心处消失,条纹变粗。
从数量上看,如果d减小或增加半个波长时,光程差就减少或增加一个整波长λ,相应的就有一个圆环条纹在中心“消失”或“冒出”,对应的关系式为:据此可知,若条纹的移动数ΔN、光波波长λ和平面镜M1的移动距离Δd中有任意两者可知均可求出第三者,迈克尔逊干涉仪自动测量实验装置就据此进行设计。
2.1 测量干涉纹样移动数量ΔN的设计当调节迈克尔逊干涉仪上的微调旋钮使平面镜M1移动时,接收屏上会有明暗相间的条纹移动,条纹圆心处的光强也随之明暗交替变化,一个明暗变化周期正好对应条纹的一次吞吐。
因此,可以将光敏电阻置于凸透镜L2的焦平面点A处作为光电探测器,将该处的光强变化转化成相应电脉冲信号,用于条纹移动数量ΔN的计数。
装置工作流程如图2所示,将带可调狭缝的双PIN光电二极管安装在凸透镜L2的焦平面点A处采集光信号。
借助凸透镜L2的能量聚集作用,可大幅提高明暗条纹间的光强变化差异,提高脉冲信号的可识别度。
而可调狭缝的引入,一方面可以遮挡非垂直入射光的干扰,提高信号的信噪比;另一方面可限制入射光的最大光通量,保证光电转换信号处于正常水平。
(1)光信号的采集与抗干扰电路设计由于背景光和PIN光电二极管管中暗电流的存在,无论有无信号光照射,光电二极管中都会有电流产生,将给条纹移动数量ΔN的测量带来干扰,如何有效提高电路的抗干扰性是关键[2]。
设计方案采用对称差分运放电路来解决该问题,即使用一对同型号的S2387-33R型PIN光电二极管分别对条纹光信号和背景光信号进行光-电转换,外加可调透光狭缝进行杂光屏蔽,并以多个超低偏置电流差动运算放大器OPA129组成差分放大电路对采集到的两路信号进行放大和滤波处理(分别如图3中的框1、框3和框2),可有效抑制两路输入信号中的共模信号,从而降低背景光和光电管中暗电流的干扰,提高PIN光电二极管对条纹光强的变化的敏感程度,获得更为纯净的光信号电压Vout输出[3]。
(2)光信号的脉冲信号转化与抗干扰设计由于移动的明暗相间条纹在PIN光电二极管中激发的电信号近似为正弦波,如图4(a)中所示。
但该信号不能被单片机有效识别,需进行脉冲波波形转换。
为此,我们以滞回比较器LM339为核心进行波形转换设计,电路原理图如图4(b)中所示[4]。
在LM339输入端输入正弦波信号,经电压比较(由R1、R2和BG1等组成分压电路,调整R2阻值可改变参考电压Uoh),当输入电压升至参考电压Uoh时LM339将输出高电平,而在输入电压低于参考电压Uoh时则输出低电平(如图4(a)中所示),由此将正弦信号转化为高抗干扰的脉冲信号,并被单片机有效识别。
2.2 测量平面反射镜M1移动距离Δd的设计式(1)中,如何准确测量平面镜M1的移动距离Δd也是我们非常关注的一个焦点。
设计中,我们应用步进电机在步进过程中每一个脉冲触发的角(线)位移恒定这一特性来实现[5]。
具体实现中,由步进电机驱动丝杆旋转,将步进电机的角位移转化为丝杆上滑块(平面镜固定其上)的线位移,其位移Δd为:Δd=kΔN式中,k为步进电机的角位移与滑块线位移之间的转化当量,其与步进电机的步距角大小、丝杆的螺距等密切相关,具体值由实验中测定;ΔN为单片机向步进电机发出的步进脉冲个数。
由此,我们只要测定精确k值并由单片机自动计量步进电机的步进脉冲数就可以得到的平移量。
2.3 抗震措施的设计由于迈克尔逊干涉仪是一种精密的光学实验仪器,对外界的震动非常敏感。
传统型迈克尔逊干涉仪采用铸铁基座增大仪器惯性,底部加垫橡胶圈吸震等措施来抵御外界震动干扰[6-7]。
该方式对提高仪器稳定性有一定作用,但也导致了仪器整体质量偏大、便携性变差等不足。
新方案用降低仪器重心和多重吸震措施取得了便携性与稳定性的平衡:(1)降低系统重心和提高系统惯性。
将系统各部件扁平安装在同一硬质基座上,在降低系统的重心高度的同时提高系统的整体惯性。
(2)引入多重吸震措施。
用软质硅胶垫替代橡胶垫将光学系统与桌面、运动部件与固定部件相隔离;在运动部件表面涂抹润滑油脂,减少摩擦震动;将步进电机与光学系统相隔离,用传送带传送动力和阻隔电机震动,并在电机固定螺栓中加垫软质硅胶进行吸震。
3.1 系统的整体设计完成关键部位设计后,以STC89S52单片机为核心建立自动测量系统,其控制流程设计如图5所示。
系统通过键盘输入控制指令,CPU对指令进行解码并输出步进电机执行脉冲控制指令,从而步进电机产生相应的角位移,平面镜M1产生位移Δd;同时,CPU将接收到光电传感器送来的光脉冲数ΔN。
应用(1)式,可完成迈克尔逊干涉实验的各项应用测量。
3.2 系统的实现与数据测量实验系统改装完成后,实验过程中数据可由LCD液晶显示屏直接显示。
应用该系统进行激光波长测定,测量数据如表1中所示。
测量数据表明,测试结果精度较高,在条纹移动数量ΔN较小时误差较大,随ΔN增加误差减小,在ΔN达到250以上时测试数据基本稳定。
分析其原因与条纹移动过程中ΔN计数自动开始的触发位置选取有关。
实验中可以通过增加测量条纹移动数量 (或滑块移动距离ΔN)来提高测量精度。
迈克尔逊干涉仪自动测量装置通过引入多重抗震和抗干扰措施提高了系统的稳定性和精度,借助于STC89S52单片机的数据处理能力,能快速实现数据的测量和实验结果显示。
与传统型仪器相比具有体积小、重量轻、精度高、操作简便和直观等特点,可有效降低学生的劳动强度,节约操作时间,提高实验效率和研究兴趣。
若在光路中引入不同的透明介质和外界作用,还可完成折射率、热胀冷缩和压电效应等趣味光学演示实验的开发。
【相关文献】[1] 陈业仙,周党培,关小泉,等.一种新型迈克尔逊干涉仪条纹计数器的设计[J].大学物理实验,2009,22(3):64-67.[2] 杨振乾,张旭东,王子城,等.基于Arduino单片机的迈克尔逊干涉仪测量改进[J].实验室研究与探索,2016,35(1):50-53.[3] 王佩祥,喻秋山,黄志洋,等.偏振光实验系统的趣味性改进[J].物理实验,2016,36(2):37-41.[4] 穆天红,杨云,冯聪.一种光幕测速系统的设计与实现[J].井冈山大学学报:自然科学版,2013,34(6):51-55.[5] Ku Shaoping,Liu Jing.Design of the control systems of stepping motor based onSTM32F10x and MDK[J].Ceramic International,2009,3(29):1671-4431.[6] 杨长铭,王阳恩,田永红,等.大学物理实验[M].武汉:武汉大学出版社,2012:245-253.[7] 翁有程,洪凌鹏,等.迈克尔逊干涉仪反射镜的调节[J].大学物理实验,2016(1):70-71.。