一种新的实时半实物网络仿真方法
半实物仿真
Reflective Memory 与其它网络技术比较
Reflective Memory产品是网络解决方案之一,就象 Ethernet,Fast Ethernet或其它网个优势: -提供低数据传输滞后(750ns)的实时通讯; - 易于使用,节点间的距离长(节点间最大距离可达 10KM); -高性能,提供自动节点旁路选择( High noise immunity ) 功能。
主机平台支撑:
Windows SunOS 5.7+ HP/UX 10.x+ IBM AIX 4.1+
7.2.2实时网络技术
实时通信网络是用于需要较高实时性要求 的应用领域的专用网络通信技术,一般采 用基于高速网络的共享存储器技术实现。 它除了具有严格的传输确定性和可预测性 外,还具有速度高、通信协议简单、宿主 机负载轻、软硬件平台适应性强、可靠的 传输纠错能力、支持中断信号的传输等特 点。
7.1.4半实物仿真系统的基本组成
专用或通用仿真计算机 系统总控台 实物设备:转台、负载模拟器等 仿真网络
总控台
转台
7.2半实物仿真的支撑技术
7.2.1实时仿真计算机 7.2.2实时网络技术 7.2.3仿真框架技术 7.2.4接口技术
7.2.1实时仿真计算机
Reflective Memory 是能够读、写的存储器; 网络上的每个节点有一个所有数据的本地拷贝; 写入的数据被存储到本地RAM,并且播送到其他节点上; 当访问本地节点时,完成读数据的过程; 网络保证实时的、确定的数据传输; 可以减少软件开发时间和费用
允许长距离连接;
Reflective Memory与其它网络速度比较
RM 100BaseTX
半实物仿真技术基础及应用实践

半实物仿真技术基础及应用实践半实物仿真技术,是一种将实物元素与虚拟元素结合的仿真技术。
它结合了虚拟现实技术、计算机图形学、人机交互技术等多个学科的知识,旨在模拟真实环境,为用户提供身临其境的体验。
半实物仿真技术的基础是虚拟现实技术。
虚拟现实技术通过计算机生成的图像和声音,为用户创造了一个仿真的虚拟世界。
完全依靠虚拟现实技术存在一些局限性,如缺乏真实感和触感,无法真实模拟物体的质感和重量等。
为克服这些问题,半实物仿真技术引入了实物元素,使用户能够感受到真实的触觉和交互体验。
在半实物仿真技术的应用实践中,存在着广泛的领域和应用。
其中之一是娱乐和游戏领域。
通过使用半实物仿真技术,游戏开发者可以为玩家打造出更加真实的游戏体验,例如使用物理反馈设备模拟武器的震动和力量,或者使用运动捕捉技术追踪玩家的动作实时反馈到虚拟世界中。
除了娱乐和游戏领域,半实物仿真技术也被应用于教育和培训领域。
通过使用半实物仿真技术,教育者可以创造出逼真的场景,使学生能够在安全的环境中进行实践和训练。
在医学教育中,半实物仿真技术可以用于模拟手术操作,使学生能够在模拟器上练习真实的手术技能。
半实物仿真技术还可以应用于产品设计和工程领域。
通过使用半实物仿真技术,设计师和工程师可以在设计过程中进行虚拟测试和验证。
这样可以大大减少实际原型的制作成本和时间,同时提高产品的质量和可靠性。
半实物仿真技术在各个领域中都有广泛的应用。
它不仅可以提供身临其境的体验,还可以大大提升效率和减少成本。
随着技术的不断发展,半实物仿真技术将会在更多的领域中得到应用,并为我们带来更好的体验和效果。
机车控制系统半实物仿真测试实现

关键词:机车控制系统;半实物仿真;HIL测试由于机车控制系统是一个复杂的非线性系统,设计和分析难度较大,为避免试验过程中缺少对中断延迟、执行时间等实时数据的采集,影响控制系统动态和稳态性能的研究,在研究中采用半实物仿真的测试方法,得到较为理想的试验结果,为缩短交流传动系统研发时间、降低测试成本、提高系统软硬件质量和可靠性提供有利依据。
1半实物仿真介绍半实物仿真的测试方法分为快速控制原型(以下简称RCP,RapidControlPrototyping)和硬件在回路(以下简称HIL,HardwareintheLoop),这两种形式在整个半实物仿真试验过程中相辅相成。
RCP过程采用“虚拟控制器+实际被控对象”的模式;HIL过程采用的是“实际控制器+虚拟被控对象”的模式。
其中,针对带载有功率的设备主要采用HIL测试方式,因此机车控制器的半实物仿真采用HIL测试的方式。
HIL测试方式是以实时处理器运行仿真模型来模拟受控对象的运行状态,通过I/O接口与控制器实物相连接,实现对控制器的性能指标、容错能力等方面的测试。
2测试方案(1)硬件平台。
测试过程中涉及的硬件平台设备包括:上位机、转换器、仿真机以及实际控制器,这些设备之间呈环形连接状态。
上位机根据输入的指令建立与实际控制器相对应的数学模型,并对数学模型进行编码,生成仿真机可识别的目标代码。
目标代码经上位机的通信转换卡、通信线缆、仿真机通信接口下载至仿真机中。
同时,上位机可以利用调试软件根据实际控制器需要的工况和功能生成与之相应的控制信号,并将该控制信号经上位机的通信转换头和通信线缆传输到实际控制器中。
仿真机运行经由上位机而来的目标代码,并根据转化器输出的反馈信号生产环境模拟信号,将该环境模拟信号输入转换器,转化器传导环境模拟信号至机车的实际控制器,控制器生成的信号再经由此路径以反馈输入信号的形式传递给仿真机。
通过断线测试箱(以下简称BOB,BreakOutBox),可以在不中断信号连接的情况下对信号进行测试;也可以断开连接,直接从输出端子处为实际控制器引入激励信号或对I/O信号进行静态测试,以确认信号是否正确。
一种基于半实物仿真的新型网络模拟模型研究
1 引言
随 着 计 算 机 网 络 日趋 复 杂 庞 大 , 客观 可 靠 的 对 网 络 软 硬件 进行 规 划 设 计 以及 测试 验 证 显 得 越 加 重 要 。 在 现 在 的 网 络规 而 模下 , 在实 际 网络 环 境 中进 行 这 样 的 工作 成 本 太 高 已几 乎不 可 行 , 而代 之 的是 目前 已得 到 广 泛应 用 的 网络 模 拟 仿 真 环 境 。 取 需 要 特 别 指 出 的 是 , 拟 (i l i ) 仿 真 (m l i ) 模 s ao 和 mu t n e ua o 是 tn 有相 当区 别 的 。 准确 的定 义 有 : ( ) 拟 即选取 一 个物 理 的或 抽 象 的 系统 的某 些 行 为特 征 , 1模 用另 一 系 统 来 表示 它们 的过 程 。 拟 技 术 的 高 级 阶 段 称 为仿 真 模 模拟 、 统仿真 。 系 即用 一 数 据 处 理 系 统 来 全 部 或 部 分 地 仿 真 某
维普资讯
一
种基于半实物仿真的新型网络模拟模型研究
管 天 卢泽 新 白建军
( 国防科技 大 学计算机 学院 62教 研 室 。 1 长沙 4 07 ) 10 3
E— i:o tle@1 3t m malc w ak r 6 .o
摘
要 网络 模 拟 是 现 代 进 行 网络 协议 设 计验 证 和 测 试 普遍 采 用 的 方 法 ,而 半 实物 网络 仿 真 是 一 种 能 够 更 直观 精 确 地
进 行 网 络 软硬 件 的 验 证 与 测 试 的 新 型技 术 。 文 章将 介 绍 半 实物 网 络 仿 真概 念 , 述 该仿 真技 术 的 原 理 , 阐 并基 于半 实物 网
络仿真的思想, 与传 统 的 网络 模 拟 模 型 进 行 比较 , 出 了一 种 新 型 的 网络 模 拟 模 型 仿真 模 型
基于xPC的光电平台系统半实物实时仿真
基于xPC的光电平台系统半实物实时仿真黄显林;鲍文亮;卢鸿谦;李明明【摘要】为了便捷高效地设计和调试光电平台系统的稳定、跟踪控制算法,基于Matlab的xPC Target环境设计开发了半实物实时仿真系统.阐述了系统的总体设计方案,给出了系统软、硬件实现方法.通过半实物仿真,完成了平台的模型结构参数辨识,设计并测试了比例积分控制器、校正控制器和μ综合控制器.对半实物仿真系统进行摇摆实验以评估所设计的控制系统的视轴稳定精度.实验结果显示,校正控制器因其在低频段具有更高的增益从而使系统获得了最高的稳定精度,通过实验结果可有效地选择出扰动抑制特性最优的控制器设计.%In order to design and debug the stabilizing and tracking control arithmetic of an electro-optical platform system conveniently and efficiently, a hardware-in-the-loop simulation system was designed and implemented based on Matlab xPC target environment. The overall design of the system was presented, and the implementation of software and hardware was described. Through hardware-in-the-loop simulation, the model structure and parameter of the plant were identified, furthermore, proportional integral controller, correction controller, and μ synthesis controll er were designed and tested. Vibration experiments were carried out for every control system designed to evaluate the line-of-sight stabilization accuracy. Experimental results show that the correction controller, which has the maxium gain value in the low frequency band, makes the system achieve the highest stabilization accuracy. According to experimental results, the controller which has optimal disturbance attenuation is selected.【期刊名称】《应用光学》【年(卷),期】2012(033)001【总页数】7页(P19-25)【关键词】光电平台;惯性稳定;xPC目标;半实物仿真;μ综合【作者】黄显林;鲍文亮;卢鸿谦;李明明【作者单位】哈尔滨工业大学控制理论与制导技术研究中心,哈尔滨黑龙江150001;哈尔滨工业大学控制理论与制导技术研究中心,哈尔滨黑龙江150001;哈尔滨工业大学控制理论与制导技术研究中心,哈尔滨黑龙江150001;哈尔滨工业大学控制理论与制导技术研究中心,哈尔滨黑龙江150001【正文语种】中文【中图分类】TN209;TP275引言光电稳定跟踪平台是近年来发展迅速的一种新型实时图像侦察设备,其主要功能是隔离载体的运动使平台承载的光学传感器能够获得目标或目标区域稳定清晰的图像[1-2]。
半实物仿真简介
半实物仿真平台简介2.1组成半实物仿真平台主要由主控计算机、仿真计算机、控制计算机(原型机)、A/D接口、D/A接口及相关能源设备、记录设备等组成,如图1所示。
其中被控对象采用数学仿真,由dSPACE仿真计算机通过软件实现;控制计算机用仿真实物实现,即用dSPACE标准组件作为控制计算机的快速原型机,实现控制计算机功能;仿真计算机通过A/ D、D/A等输入输出口与控制系统实物相互,实现数字控制器与外界设备的信息交换。
输入和输出信息分别从转接口和dSPACE引出,通过记录仪进行记录。
2.2主控计算机主控计算机是整个仿真系统的上位机,采用有多个ISA总线的工控机,安装MATLAB6.5系列软件、dSPACE软件,用于构建控制系统Simulink框图、进行系统参数优化和数字仿真、控制仿真过程、编译下载仿真软件、输入输出仿真结果等。
根据控制系统设计和建模结果,利用MATLAB/Simulink构建系统数字仿真框图,进行数字仿真和控制参数优化。
在数字仿真的基础上,利用dSPACE提供的RTI软件,将被控对象的Simulink框图生成实时代码并自动下载到dSPACE仿真计算机中;将控制器控制方程的Simulink框图生成实时代码并自动下载到dSPACE快速原型机中。
用dSPACE提供的综合试验与测试环境软件ControlDesk、自动实验及参数调整软件MLIB/MTRACE、PC与实时处理器通信软件CLIB 以及实时动画软件RealMotion等实现试制和参数测量。
该软件环境可以方便地实成、下载和试验调试等工作。
2.3仿真计算机用dSPACE标准组件系统DS1005PPC处理器板作为仿真计算机,用以模拟被控对象。
DS1005PPC处理器与主控机之间用光缆连接交换数据。
DS1005PPC板主频480MHz;片内数缓存均为32KwordS;通过32位PHS总16块I/O板,通过ISA总线与主机进行并具有相当强的计算能力。
EXata半实物网络仿真软件
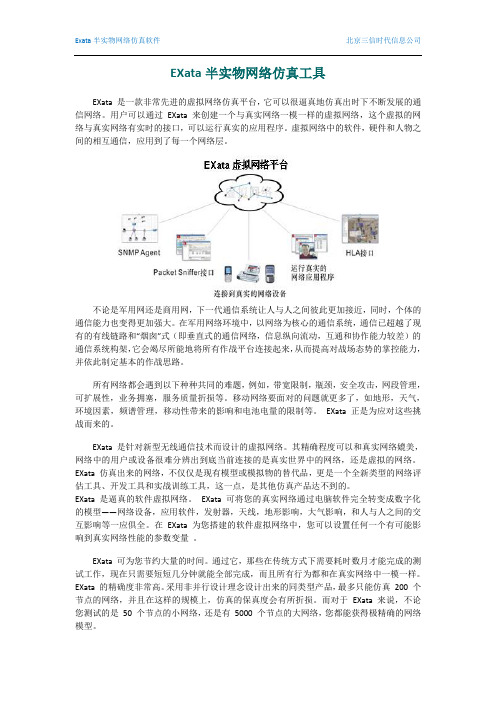
EXata半实物网络仿真工具EXata 是一款非常先进的虚拟网络仿真平台,它可以很逼真地仿真出时下不断发展的通信网络。
用户可以通过EXata 来创建一个与真实网络一模一样的虚拟网络,这个虚拟的网络与真实网络有实时的接口,可以运行真实的应用程序。
虚拟网络中的软件,硬件和人物之间的相互通信,应用到了每一个网络层。
不论是军用网还是商用网,下一代通信系统让人与人之间彼此更加接近,同时,个体的通信能力也变得更加强大。
在军用网络环境中,以网络为核心的通信系统,通信已超越了现有的有线链路和“烟囱”式(即垂直式的通信网络,信息纵向流动,互通和协作能力较差)的通信系统构架,它会竭尽所能地将所有作战平台连接起来,从而提高对战场态势的掌控能力,并依此制定基本的作战思路。
所有网络都会遇到以下种种共同的难题,例如,带宽限制,瓶颈,安全攻击,网段管理,可扩展性,业务拥塞,服务质量折损等。
移动网络要面对的问题就更多了,如地形,天气,环境因素,频谱管理,移动性带来的影响和电池电量的限制等。
EXata 正是为应对这些挑战而来的。
EXata 是针对新型无线通信技术而设计的虚拟网络。
其精确程度可以和真实网络媲美,网络中的用户或设备很难分辨出到底当前连接的是真实世界中的网络,还是虚拟的网络。
EXata 仿真出来的网络,不仅仅是现有模型或模拟物的替代品,更是一个全新类型的网络评估工具、开发工具和实战训练工具,这一点,是其他仿真产品达不到的。
EXata 是逼真的软件虚拟网络。
EXata 可将您的真实网络通过电脑软件完全转变成数字化的模型——网络设备,应用软件,发射器,天线,地形影响,大气影响,和人与人之间的交互影响等一应俱全。
在EXata 为您搭建的软件虚拟网络中,您可以设置任何一个有可能影响到真实网络性能的参数变量。
EXata 可为您节约大量的时间。
通过它,那些在传统方式下需要耗时数月才能完成的测试工作,现在只需要短短几分钟就能全部完成,而且所有行为都和在真实网络中一模一样。
广播内存网在实时半实物仿真系统中的实现
在航天、 航空 、 国防及兵器等军工领域 , 仿真技术
特别 是半 实物 仿真 占有 极其 重要 的地位 。在半 实物仿 真中, 实时性是一个重要 的特点 , 实时性能的实现和保 证是 仿真 技术 研究 的 主要 内容 。
这 个截止 时 间到达 之 前 完 成 , 则 后 果 可能 是 灾 难 性 否
广播 内存网就是一种高速、 实时、 确定性的网络 , 可以较好地解决半实物仿真系统 中数据传输的实时性 问题。目 在许多实时领域已经得 到了广泛的应用。 前 在系统中如何有效地利用广播 内存网进行高速实时通 信, 提高系统的整体性能是下面要讨论 的内容。
1 广播 内存 网技术
1 1 实 时网 络技术 .
s o e d ly d dte n ft n mis n aes l a d terl it shs . h wst ea sa i r g o a s si r maln e a l i ih h n h i r o h i i b y
Ke y wor : r a c s mo t o k; e ltme n t o k; LS ds b d a tme r ne r r a —i e r HI o y w w
Ab ta t A t o o d s n HI S u i g b o d a t moy n t o k i p t o wa d T e p n i l , h r c e s s r c : meh d t e i L sn r a c s g me r ew r s u r r . h r c p e c a a tr - f i i t n n e c n e t n o e b o d a t me r e o k a e d s r e . l a t L lt r s f a e i a d i tr o n ci f t r a c mo n t r r e c b d A e — me HI S p af m ot r c o h s y w i i o w b s d o i u l h r d me r d a e i d s e s t ef n t n a d c p bl y o es se T er s l a e n vr a a e mo mi w r s e i d t t t h ci n a a i t f y t m. h e u t t s y n g oe u o i h t
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种新的实时半实物网络仿真方法1赵玉亭戴冠中张治慕德俊陈旿西北工业大学自动化学院,西安,710072zhaoyuting77@摘要:开发了一种新的研究大规模网络的实时半实物仿真方法,并对无线Ad Hoc网络上的视频传输进行了成功仿真,证明该方法对研究通信网络具有实时性、可扩展性和高保真性。
关键词:实时;半实物;网络;仿真;Ad Hoc1.仿真及半实物仿真仿真方法的应用最早可追溯到1773年,法国自然学家用仿真方法做物理实验估计π值。
经过200多年的发展,仿真技术已经成为科学实验的有效手段,对科学技术的发展起到了巨大的推动作用。
1992年美国提出22项国家关键技术,仿真技术列第16项;提出21项国防关键技术,仿真技术列第6项。
近年来美国更加重视仿真,将发展“合成仿真环境”作为国际科技发展的7个科技推动领域之一[1]。
1.1 仿真分类根据仿真过程中所建立模型对象的方式不同,可以将系统仿真分为三种模式[1]:(1)计算机仿真。
其特点是系统用严格的数学模型表示,不使用实际系统的任何部件。
计算机仿真的模型抽象程度最高,仿真费用最省,仿真所花的时间最少,作各种变量控制试验也最方便。
但它有一个最致命的弱点,即仿真结果的可信度较差。
(2)实物仿真。
即系统原型方法,特点是全部使用实际系统的子系统或部件,系统原型可以任意接近最后的系统配置。
实物仿真与实际系统最接近,仿真结果最可信,但费用高,执行起来所花时间长,作变量控制试验也不方便。
(3)半实物仿真,又称为硬件在回路(Hardware-In-Loop,HWIL)仿真。
被仿真系统有一部分用与实际系统相同或相近的实物,其它部分则采用计算机仿真形式。
半实物仿真是一种将控制器(实物)与在计算机上实现的控制对象的仿真模型(数学仿真)联接在一起进行实验的技术。
在这种实验中,控制器的动态特性、静态特性和非线性因素等都能真实地反映出来,因此它是一种更接近实际的仿真实验技术。
这种仿真技术可用于修改控制器设计,同时也广泛用于产品的修改定型、产品改型和出厂检验等方面。
1.2 半实物仿真及其特点半实物仿真技术自20世纪60年代问世直到目前美国研制航天飞机,始终盛行不衰[2]。
美国大多数国防承包商都有一个或多个半实物仿真实验室,这些实验室代表了当前世界先进1本课题得到航空科学基金(01F53029)、西北工业大学科技创新基金资助。
- 1 -水平。
其先进性体现在:(1)有高速高精度的仿真机;(2)有先进完备的环境模拟设备。
国内半实物仿真技术在导弹制导、火箭控制、卫星姿态控制等应用研究方面也达到了较高水平。
自20世纪80年代开始,我国建设了一批高水平、大规模的半实物仿真系统,如射频、红外制导导弹、歼击机、驱逐舰半实物仿真系统等。
半实物仿真的特点是[1]:①在回路中接入实物,必须实时运行,即仿真模型的时间标尺和自然时间标尺相同。
②需要解决控制器与仿真计算机之间的接口问题。
③半实物仿真的实验结果比数学仿真更接近实际。
2.半实物网络仿真2.1 半实物网络仿真的要求网络的半实物仿真是一种重要的网络研究方法。
它允许现实世界的网络分组流量和仿真器中模拟的流量进行交互,经受用户定义的分组延时、丢失、重排序和复制。
利用网络仿真,用户能够测试现实网络设备在各种不同模拟的网络环境中的功能和性能,而无需获得、了解或修改它的内部协议栈。
正由于此,半实物仿真被广泛应用于测试网络协议和设备。
实时模拟IP网络对于网络仿真引擎来说是一个很大的挑战和负担。
网络仿真器必须同时监视实际运行的网络作为输入数据流量、仿真流量并将仿真结果重新递交给实际运行的IP 网络。
网络仿真器必须具有下列的特性才能够进行上述的网络模拟[3]:速度快(Fast)——仿真器处理单个分组的时候必须比实际的网络要快。
如果分组在模拟网络内部需要10ms,那么就要将分组在10ms以内重新递交给目的端IP电话所在的实际网络。
如果这个时间增加到了50ms或者更多,那么模拟IP网络就不称职了——实际的网络设备将经历很高的端到端延时,这与实际网络情况出入太大,没有反映出真实性。
扩展性强(Scalable)——即使在网络规模达到数以千计的时候,仿真器也要执行得比实际网络运行要快。
一个模拟的IP网络如果只能支持小规模网络,那么它的有用性就大打折扣了。
高保真度(High-Fidelity)——仿真器必须对模拟IP网络进行精确建模的情况下满足前面的两个要求。
这样就对网络仿真提出了很高的要求,我们需要开发能够实现实时IP网络模拟的网络半实物仿真方法。
2.2 半实物网络仿真的原理IP网络模拟应该允许真实的网络设备(例如VoIP电话和计算机程序)通过模拟的网络进行通信[4]。
这个功能是通过从实际的网络当中读取实际的IP流量,并将读取到的数据流量添加到仿真当中,然后在仿真结束时,将仿真器中的数据流量重新注入到实际的IP网络。
尽管IP网络的通信效果是仿真得到的,但是对于实际的设备来说,却和真实的网络流量毫无二致。
我们开发的IP网络模拟是通过QualNet外部接口(External Interface)API实现的。
这个API使得QualNet和其它的仿真器、图形用户接口(Graphic User Interface, GUI)和物理设备容易接口。
它将接口简化为两个函数:获取(Get)数据和发送(Send)数据。
“Get Data”函数利用libpcap库从实际运行的IP网络中接收数据。
Libpcap是一个开放- 2 -源代码的网络管理工具,允许QualNet从实际网络中直接读取IP分组。
当QualNet确定要仿真某个读取到的IP分组(例如该分组是两个QualNet已经作了标记的真实设备之间通信的数据),QualNet将使用外部API将此IP分组添加到仿真内部。
IP分组将在仿真场景中的节点之间传输,最终要么到达目的端,要么由于网络问题被丢弃。
如果某个IP分组到达其目的地,那么外部接口API将调用“Send Data”函数。
此函数将该IP分组重新导入实际运行的IP网络。
此过程调用另一个称为“libnet”的开源工具。
IP 分组重新被送回到实际运行网络中的实际接收者——目的端IP设备。
图1 IP网络模拟器原理图图1当中,源端IP电话(真实设备)向目的端IP电话(另一个真实设备)发起呼叫。
呼叫的语音数据是以逐个IP分组的形式在网络中传输的。
在传输的过程中,这些IP数据分组被QualNet导入模拟IP网络内部,从洛杉矶经过Internet传输到纽约,然后再重新导出模拟IP网络,递交给目的端IP电话。
对于源端和目的端IP电话而言,模拟网络也提供了实际网络一样的传输延时和分组丢失,语音分组就好像经过了实际的Internet传输一样。
从目的端的体验效果来看,是无法区分出分组是经过实际网络还是模拟网络传输的。
实时IP网络模拟具有许多好处。
它使模拟网络代替了实际网络,节省了人力和财力,加速了实际设备的研发。
3.建立半实物网络仿真我们基于QualNet建立了半实物网络仿真环境。
3.1 实验床的配置我们的实验床包含3台运行Windows XP系统的电脑:一个作为仿真服务器,其它两个作为物理网络收发设备。
图2 配置QualNet半实物仿真实验床实验床按照图2中标示的IP地址进行配置。
这三台计算机连接到了同一个有线(或无- 3 -线)交换机上。
这样,这三台计算机就处于同一个网段内并且能够相互访问,我们需要对192.168.0.1和192.168.0.4这两台计算机进行如下的静态路由配置,使得二者之间的通信都必须经过仿真服务器转发:route -p add 100.100.10.0 mask 255.255.255.0 192.168.0.1003.2 仿真场景的配置我们在仿真服务器上运行的仿真网络场景示例如图3所示[5]。
图3 半实物仿真场景示例这个示例场景一共有四个节点,IP地址分别是100.100.10.1、100.100.10.2、100.100.10.3和100.100.10.4,组成了一个移动自组织网络(Mobile Ad Hoc Networks,MANET)。
它们都具有802.11射频,运行AODV(Ad Hoc On Demand Vector)路由协议。
最左边的1号节点向最右边的4号节点发送恒定比特率(Constant Bit Rate,CBR)流量,数据经由中间的2号或3号节点转发。
3.3 半实物仿真的配置上述仿真场景中的节点IP地址都属于100.100.10.0子网,需要和实际物理网络收发设备进行影射。
影射的结果就是将100.100.10.1和100.100.10.4这两个节点分别和192.168.0.1和192.168.0.4这两个计算机建立匹配关系。
由192.168.0.1计算机发送的数据发送到192.168.0.100后,仿真器会将数据导入100.100.10.1节点,接着由100.100.10.1节点把数据通过仿真器中模拟的场景进行传输,最终到达100.100.10.4节点,再由100.100.10.4节点把数据导出到192.168.0.4计算机。
对于192.168.0.1和192.168.0.4上运行的端到端应用程序而言,仿真器是透明的。
192.168.0.4收到的数据就好象是经过这四个仿真节点组成的Ad Hoc网络传输的一样。
4.仿真实例我们使用VLC 8.0.2版网络视频播放程序作为192.168.0.1和192.168.0.4计算机上运行的端到端应用程序。
192.168.0.1在本地运行一个视频文件,通过半实物仿真将视频数据经由模拟的无线Ad Hoc网络传输后,再由192.168.0.4上运行的VLC接收并回放出来。
由于这个我们运行的这个仿真网络场景非常简单,所以只能明显的察觉出仿真网络传输带来的延时,但是视频图像本身并没有出现明显的质量损失。
我们设置的仿真场景如图4所示:图4 半实物仿真实验场景实例最左端和最右端的两个节点分别是视频的发送端和接收端。
中间的节点个数可变,用来- 4 -表示视频分组从信源到信宿经过了几跳的中继传输。
我们进行了1~9跳的仿真实验。
在接收端,我们将接收到的视频数据分组进行了实时记录,从最终文件的大小我们可以看出经过不同网络环境传输后的视频分组的丢包情况,根据对接收视频文件的主观评价标准,我们可以看出经过不同网络环境传输后的视频分组的出错情况。
图5 记录文件大小的曲线从图5可以看出,Ad Hoc网络中的中继跳数是一个非常重要的性能参数指标。
1跳2跳3跳4跳5跳6跳7跳8跳图6 1~8跳情况下的视频某帧截图比较根据记录视频文件回放的主观视频质量评价,我们可以看出,在我们实验设置的参数下,随着跳数的增加,视频质量的下降趋势和图6所示的文件大小的变化趋势相同:超过4跳的Ad Hoc传输以后,我们几乎无法观察视频图像;从3跳开始,音频质量就已经下降了很多,令人无法接受了。