机床运动仿真
SolidWorksMotion虚拟样机运动仿真

注意事项:在建立复杂运动副时,需要注意运动副之间的约束关系是否合理,避免 出现运动学奇异或动力学不稳定的情况。
运动仿真结果分析
运动学分析:对运动过程中各部 件的位置、速度、加速度等参数 进行计算和评估
SolidWorks Motion与 Adams软件无缝 集成,实现运动 仿真与动力学分 析的完美结合。
通过Adams软 件进行更深入 的动力学分析, 包括碰撞检测、 振动分析等。
方便地在 Adams软件中 进行优化设计, 提高产品的性 能和可靠性。
实现从 SolidWorks到 Adams的模型 传递,保持数 据的一致性和 完整性。
结果分析:通过仿真结果分析船舶推进系统的性能表现,如推进效率、稳定性等,为优化 设计和改进提供依据。
PART 07
SolidWorks Motion未来发
展与展望
新功能与技术趋势
人工智能与机器学习在SolidWorks Motion中的应用,提高仿真效率和准确性。 云技术与实时协作功能,实现异地团队共同进行运动仿真与分析。 虚拟现实与增强现实技术,提供更真实的运动仿真体验和可视化效果。
04 S o l i d W o r k s Motion高级功能
06 S o l i d W o r k s Motion应用案例
PART 01 添加章节标题
PART 02
SolidWorks Motion概述
定义与功能
添加标题
定义:SolidWorks Motion是一款基于SolidWorks平台的运动仿真插件,用于对机械系统进行运 动学和动力学仿真。
PART 06
基于EON的数控机床换刀系统运动仿真
仿真实验的设计具有一定 的指导意义。
关键词 :E N软件 ;刀库 ;换刀系统 ;虚拟现实 ;数控机床 O 中图分类号 : 4 4 G 3 文献标识码 : B 文章编号 : 0 245 (0 8 o — 0 8 0 10 -9 6 2 0 )7 0 8 —5
S muain o h NC e c a gn n v ss se b s d o i lt ft e C x h n ig k ie y tm a e n EON o
和链式刀库换 刀方式 的动作过程进行 了模拟仿真 。应用于教学或 培训 ,解 决了传统教学 中学生对数控机 床
的刀库结构和换 刀方式认识模糊 , 师讲解不便的 问题 。加入 了实际操作的视频资料 ,既可发布为 网页形 教
式 ,应 用于网络教学 。又可作为单机版教学软件进行教学 ,拓宽 了教学 空间。对后 续数控机床各部 件运动
c i e a d ,e e t h h i y e ma a i e T e s se s a p id t e ta h n r t in n o s l e t e h n r h n s v n w h t e c a n tp g g n . h y t m i p l o t e c i g o r n ig t ov h y i e h a
i g mo e h iu n omain w t r ci a o e ain c n b s t en t r a e sye u e o o l rn t r n d .T e v s a if r t h p a t l p r t a e a h e l o i c o wo k p g tl s d n t ny f ewo k o
Ab t a t Ma i gu e o e vr a e i c n lg lme t e mo e n i lt n fre c a gn n v ss s s r c : k n s f h itl r a t t h o o y i e n st v me t mu ai o x h n i gk ie y — t u l ye mp h s o
1.6VERICUT机床加工仿真过程

第1章VERICUT系统简介本章介绍VERICUT 7.2软件的系统需求、安装步骤和功能模块。
通过本章的学习,掌握VERICUT 7.2软件的系统需求、软件安装方法及其基本功能,了解VERICUT软件的工作过程。
1.1 系统要求VERICUT 7.2软件的系统要求如表1-1所示。
表1-1 VERICUT 7.2软件的系统要求设备配置硬盘空间1GB(完整安装包括:Library(控制系统库)、Sample(样本文件)、Help(帮助)和Java Run-Time)临时硬盘空间除1GB硬盘空间以外,安装VERICUT时需要有1GB的临时硬盘空间Page File 推荐使用两倍的可用物理内存操作系统VERICUT 7.2支持Windows 7 32位/64位、Windows Vista 32位/64位和Windows XP 32位/64位VERICUT 7.2不支持Windows 2000、Windows 98、Windows ME和Windows NT操作系统Java Run Time Environment 1.6.0_07 (included in the VERICUT installation)CATIA V5接口需要Windows Script 5.3或更新的版本物理内存建议最小1GB,首选2GB处理器英特尔奔腾处理器或者100%奔腾兼容的处理器,推荐2GHz或者更快的速度。
特别是在VERICUT中运行其他大的程序时,多处理器可以提高处理性能其他两键或者三键鼠标,建议使用带滚轮的三键鼠标网卡图像设备至少能够显示16位颜色兼容OpenGL图形加速器用于机床仿真视图和零件视图中进行动态的放大、缩小、旋转、平移等操作。
由于显示切削模型需要大量的图形内存,要求显存最低512MB,建议1GB 以上优先主要内容学习目标VERICUT授权许可文件可以支持安装在SUN SPARC/Solaris、Hewlett-Packard PARISC/HP-UX和IBM RS6000/AIX操作系统的服务器上,如表1-2所示。
数控机床仿真分析报告

对仿真结果与实际实验结果之间的误差进行 分析,找出误差来源,提高仿真模型的精度。
04
数控机床仿真分析方法和 结果
仿真分析方法的选择和应用
有限元分析法
通过将机床结构离散化为有限个单元,对每个单元进行力学分析, 从而得出整体结构的应力、应变等参数。广泛应用于复杂结构的 静力学和动力学分析。
运动学仿真
定性和安全性。
运动性能评估
运动学仿真结果显示,机床 的运动轨迹准确、动态响应
良好,能够满足加工要求。
热误差预测
热力学仿真揭示了机床在工 作过程中的温度变化规律, 预测了热误差的产生及其对 加工精度的影响。
仿真分析的局限性和改进方向
01
模型简化与实际差异
02
材料属性与实际不符
03
耦合效应考虑不足
仿真分析基于理想化的模型,可能忽 略了一些实际因素,导致结果与实际 情况存在偏差。未来可考虑引入更精 细的模型和边界条件。
报告背景
随着制造业的快速发展,数控机床作 为现代制造装备的核心,其性能和加 工精度对产品质量和生产效率具有重 要影响。因此,对数控机床进行仿真 分析具有重要意义。
报告范围和限制
报告范围
本报告主要针对数控机床的仿真分析,包括机床结构、运动学、动力学、热力学等方面 的分析。
报告限制
由于时间和资源限制,本报告未能涵盖所有类型的数控机床,仅以某一款典型数控机床 为例进行仿真分析。同时,报告中使用的仿真软件和模型简化也可能存在一定误差和局
仿真结果显示,切削参数的选择对加工效果具有显著影响,合理调整切削参数可以有效提 高加工质量和效率。
冷却系统对加工过程稳定性具有重要作用
分析表明,优化后的冷却系统能够更好地控制加工过程中的温度变化,提高加工过程的稳 定性。
基于UG的车床夹具虚拟设计及运动仿真
毕业设计论文任务书一、题目及专题:1、题目基于UG的车床夹具虚拟设计及运动仿真2、专题二、课题来源及选题依据课题来源于生产实际。
现代生产制造中,机床夹具是一种不可或缺的工艺设备,它直接影响着零件的加工精度、生产率和产品的制造成本等,所以机床夹具设计是一项重要的技术工作,在机械制造以及生产技术中占有极其重要的地位。
现代生产要求企业所制造的产品品种经常更新换代,以适应市场的需求与竞争,特别是近年来,数控机床、加工中心、成组技术、柔性制造系统(FMS)等新加工技术的应用,现代机床夹具的发展方向主要表现为标准化、精密化、高效化和柔性化等四个方面。
三、本设计(论文或其他)应达到的要求:①根据提供的毕业设计资料理解设计要求,查阅相关中外资料。
②确定车床组合夹具结构及定位、夹紧方案。
③对车床组合夹具进行三维建模,生成工程图,完成爆炸图及装夹工件的动作演示。
④完成车床组合夹具加工工序和工艺方案及绘制工序图。
⑤阅读和翻译英文文献。
⑥撰写毕业设计论文。
四、接受任务学生:五、开始及完成日期:自2012年11月12日至2013年5月25日六、设计(论文)指导(或顾问):指导教师签名签名签名教研室主任〕签名〔学科组组长研究所所长系主任签名2012年11月12日摘要根据任务书的要求,本次任务主要是针对十字头零件的加工设计两套专用的车床夹具,完成相应的加工要求。
主要内容包括:加工零件的分析、分析其结构、各部分相关尺寸、加工工艺过程及工序、零件图的绘制、加工各面、孔等内容。
具体任务是针对车Φ85外圆和挖Φ24槽设计两套专用车床夹具,确定其定位、夹紧方案和误差、切削力的计算。
在此之前,首先要拟定一套高效的加工方案,进行工序及工步的确定,进而根据所选定的方案完善相应的计算和加工工艺卡片,再由所需要求,设计出夹具的尺寸,根据查找的资料,实现理论的设计。
在得到理论设计的尺寸和方案之后,利用UG进行三维建模,并对所画的各部件做装配、爆炸及运动仿真等工作,最后,将所有零部件及装配图生产工程图。
数控车床仿真操作方法

数控车床仿真操作方法数控车床(Computer Numerical Control Lathe)是一种通过预先编程的方式实现自动加工的机床。
该机床主要通过计算机软件控制其操作,具有高效、精确和灵活的特点。
在进行数控车床的仿真操作时,需要考虑以下几个步骤:1. 准备工作在进行数控车床的仿真操作之前,首先需要进行一些准备工作。
这包括选择合适的数控车床设备和编程软件,并安装好相应的驱动程序。
同时,还需要准备好待加工的工件和刀具。
2. 编程数控车床的操作是通过预先编程实现的。
在进行仿真操作之前,需要使用编程软件进行程序编写。
编程的过程主要包括确定加工轨迹、选择刀具和切削参数,并设置相应的加工指令。
3. 载入工件和刀具数据完成编程后,需要将工件和刀具的数据导入到仿真软件中。
这些数据包括工件的尺寸、形状和材料特性,以及刀具的参数和切削条件等。
通过导入这些数据,可以在仿真软件中模拟出真实的加工环境。
4. 进行仿真操作在进行仿真操作时,首先需要选择合适的仿真模式,如运动仿真、切削仿真或加工过程仿真等。
通过选择不同的仿真模式,可以观察到不同的加工效果和过程。
在仿真操作中,可以通过改变工件和刀具的数据来模拟不同的加工条件。
例如,改变工件的形状和尺寸,可以观察到不同的切削效果;改变刀具的参数和切削条件,可以观察到不同的切削力和切削温度等。
同时,还可以通过改变加工指令来模拟不同的加工过程。
例如,改变进给速度和主轴转速等,可以观察到不同的切削速度和加工效率。
通过这些操作,可以对加工过程进行优化和调整,以达到更好的加工效果和加工质量。
5. 分析和评估在进行仿真操作的同时,还可以对加工过程进行分析和评估。
通过仿真软件提供的数据和结果,可以进行加工力分析、刀具磨损分析和工件表面质量评估等。
通过这些分析和评估,可以得出加工过程的优缺点,并为进一步的改进提供参考。
总。
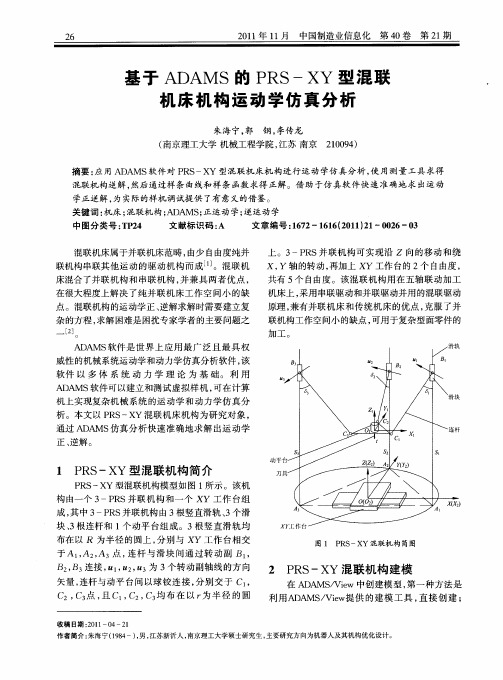
基于ADAMS的PRS—XY型混联机床机构运动学仿真分析
动
1 P S Y 型 混 联 机构 简 介 R —X
P S—X 型混联 机构 模 型如 图 1 R Y 所示 。该 机 构 由一 个 3 RS并 联 机 构 和 一 个 XY 工 作 台组 一P 成, 中3 R 其 一P S并联 机 构 由 3 竖直 滑轨 、 根 3个滑 块 、 连杆 和 1个 动 平 台组 成 。3根 竖 直 滑 轨均 3根
—
方 向与 三 相 同。
3 P S—X 混 联 机 构 运 动 学 分 析 R Y
3 1 逆 解分析 .
逆解就是 已知刀尖的位置和刀轴的姿态 , 求滑
块在 滑轨 上 的位 置 等 。在 刀 尖 处 添 加 多 自由度 驱
5t l 1 00 , 5O
图 4 滑块 速 度 一时 间 图
设 置 仿 真 时 间 参 数 为 2s 仿 真 步 数 为 50 0, 0
步 , 行 仿 真后 进 行 测 试 , 试 步 骤 是 :u d 运 测 b i— l
mesr-pitopit nw, 弹 出 的对 话 框 中 aue- on o - e 在 t n 选好 需 要测 试 的 Makr 以及 参 考 坐标 系 , 后 re 点 先 获得滑 块 和动平 台 的 位移 一时 间 图 以及速 度 一时 间 图。图形 生 成好 之 后 进 入 A A D MS的后 处 理 模 块 , 出 图 2和 图 5所示 滑块位 移 一时 间图和 工作 得 台 的位 移 一时 问 图 , 以及 滑块速 度 一时 间图和 工作 台的速度 一时 间 图。 图 2和 图 4中的 3条 不 同线 型分别 对应 3个 滑块 , 3和 图 5中的 2条 不 同线 图 型分别 对应 工作 台 的 x, 向滑 台 。 y
NX Motion运动仿真在专用螺纹加工机床设计中的应用
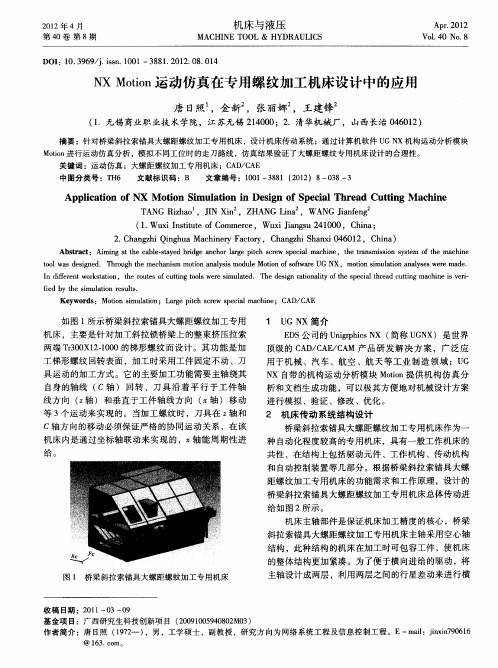
如图1 所示 桥梁斜拉索锚具大螺距螺纹加工专用
1 U X简介 GN E S公司的 U ip i X ( D n r cN ghs 简称 U N )是世界 G X
机床 ,主要是针对加工斜拉锁 桥梁上 的整束挤压拉索 两端 T30 1— 0 r X 21 0的梯形螺纹而设 计 。其功能 是加 0 0
@ 1 .C B 。 63 O
第 8期
唐 日照 等 :N t n运动仿真在专用螺纹加工机床设计 中的应用 X Moi o
・ 9・ 3
向进给 。主运动是 由伺服 电机 M 2通过 同步齿 形带 驱
动主轴 I ;轴 向进 给运动 由伺服 电机 M 3带动 滚珠 丝 杆 副拖 动主轴箱完成 ;横 向进给运动 的传动链是 :伺
M t n进行运动仿真分析 ,模拟不同工位 时的走 刀路线 ,仿真结果验证 了大螺距螺纹专用机 床设计 的合理性 。 oi o 关键词 :运 动仿 真 ;大螺距螺纹加工专用机床 ;C D C E A / A 中图分类号 :T 6 H 文献标识码 :B 文章编号 :10 3 8 2 1 )8— 3 3 0 1— 8 1(0 2 0 8—
具运动 的加工方式 。它 的主要 加工功能需要 主轴绕其 自身 的轴线 ( c轴 ) 回转 、刀具沿 着 平行 于工 件 轴 线方 向 ( 轴 )和垂 直于工 件轴线 方 向 ( ) 移动 z 轴 等 3 运动来实现的。当加工 螺纹时 ,刀具在 z 个 轴和 c轴方 向的移动必须保证严格的协 同运动关系 ,在该 机床 内是通过坐标轴联动来实 现的 , 轴能周期 性进
法兰盘上 ,伺服 电机 M1 2与 主轴箱一起运动 。 、M
z‘
上 - : -
图 4 螺 纹 切 削 循 环 过 程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机床运动仿真
一、前言
计算机仿真技术就应用计算机对系统的数学模型求解,以研究实际系统运行的性能的技术,由于计算机仿真是应用计算机中的数学模型做实验,与用实物做实验比较,具有经济、安全、实验周期短等特点。
机床制造业是其它机械加工行业的基础行业,机床做为其它机械产品制造的基础、其作为"母机"作用的重要性是鲜而易见的。
在机床的设计制造过程中引进仿真技术可以大大缩短机床的研发周期、降低机床的研发成本、提高机床的可靠性。
本文通过对一简化机床从建立模型、装配、到机床运动仿真、分析的全过程,简述了仿真技术在机床行业机床设计过程中的应用。
二、机床建模、装配、仿真、分析
2.1机床设计目标确定:
假设该机床要实现螺纹加工的功能
2.2设计目标分析
机床要实现螺纹加工,就要求,机床的主运动部分和工件进给部分有一个确定的传动关系,
1(主轴)×U×T1 = S
U--从主轴到丝杠的总传动比;
T1--机床丝杠的导程(例如:CA6140型机床的T1=12mm);
S--被加工螺纹的导程;
1(主轴)--主轴转动一转。
由上式可知,改变U就能加工出不同的螺纹。
最终由以上公式把机床模型简化为:
齿轮组、蜗轮蜗杆传动组、齿轮齿条传动组;
其中数U由齿轮组实现;
参数T1由蜗轮蜗杆传动组、齿轮齿条传动组共同实现,也可由丝杠螺母组实现,本文采用前者。
软件选择:Pro/ENGINEER,Pro/Mechanism
Pro/ENGINEER作为一款集成了CAD/CAM/CAE/PDM的工程软件,其三维建模能力很强,而其中的Mechanism模块又具有运动/动力学仿真、动态、静态、力平衡等多种仿真、分析功能,并且Mechanism提供了各种机构配合方式,能够进
行连杆机构,凸轮机构、齿轮机构、齿轮系、螺旋机构、多种复合机构等进行仿真、分析。
2.3设计
2.3.1建模
用Pro/E中的"从方程"方法应用渐开线方程实现齿轮齿型轮廓的建模
正齿轮设计的渐开线方程为:
将其转化为Pro/E中的关系式为:
r=DB/2
theta=t×45
x=r*cos(theta)+sin(theta)*theta*pi/180
x=r*sin(theta)-cos(theta)*theta*pi/180
z=0
由以上公式在Pro/E中就可建立出一般正齿轮模型:
在建立了模型之后可以应用Pro/E中参数设计功能为齿轮各个尺寸参数建立"关系",样就可由一个齿轮实现相同类型、不同尺寸齿轮的建模了。
与之配合的正齿轮,只需修改一下"参数"中的数值就可完成建模。
蜗轮、蜗杆、齿条的建模方法和步骤与正齿轮建模基本相同,仅仅是蜗轮、蜗杆、齿条所用的齿廓方程与正齿轮不同而已。
蜗轮的齿廓方程为:
r=D5/2
theta=t*45
x=r*cos(theta)+sin(theta)*theta*pi/180
x=r*sin(theta)-cos(theta)*theta*pi/180
z=m*q/2
蜗杆的齿廓方程为:
1)螺线方程:
r=m*q/2
theta=t*tx*360
z=-t*la
2)渐开线方程:
r=D4/2
theta=t*60
x=r*cos(theta)+sin(theta)*theta*pi/180
x=r*sin(theta)-cos(theta)*theta*pi/180
z=0
齿条的剖面为一连续的梯形,建模较简单,无须方程。
就此实现了机床各个功能部件的建模。
2.3.2装配、仿真、分析
首先在Pro/E的装配模块中对机构进行组装然后转入Pro/Mechanism中进行仿真分析,由于机构比较复杂、可能出现的错误比较多,所以采用部分装配再仿真、分析,仿真、分析数据正确后再加入新部件,再分析、仿真的方法逐渐由部分到整体的实现机床模型的正确建立。
在Pro/Mechanism中可进行的分析测量的量有:位置、速度、加速度、连接反作用、净负荷、冲力。
在Pro/Mechanism中测量对模型各种运动参数进行测量,假如不符合要求,则重新建立模型,再次进行仿真、分析,直至模型达到设计要求为止。
由仿真、分析结果进行改进再仿真,直至达到设计要求,接着进行各部分功能细化,机床样机最终定型。
三、结论
本文借助Pro/E实现了对简化机床从建立模型、装配到仿真分析的全过程,最终实现了对机床样机的设计。
借助像Pro/E这样的三维CAD软件和仿真技术,大大缩短了新产品设计的周期;而且通过对数字化模型的分析可以提早发现产品的缺陷并加以修改,达到了优化设计的目的;直接在数字化模型上进行各种运动及材料特性的仿真分析而不用投入大量的力、财力进行产品试制,有效节约了生产成本。
应用仿真技术对机床行业,及各个机械行业都是大有裨益的。
发布时间:2006-11-27
∙相关主题关键字:
∙机床
∙仿真
∙theta
∙分析。