台达CP2000变频器恒压供水参数设置
变频器恒压供水标准调试步骤

变频器恒压供水标准调试步骤
1、确定变频器恒压供水系统的工作条件和要求,包括所需的水压、流量和运行时间等参数。
2、检查变频器、水泵和阀门等设备的安装和接线情况,确保其符合标准要求并没有故障。
3、针对变频器的参数设定,包括输入电压、输出频率、过载保护等,进行合理的调整,确保其工作稳定和安全。
4、根据实际情况,设置变频器的PID控制参数,包括比例系数、积分时间和微分时间等,以实现恒压供水系统的精确控制。
5、对水泵的运行特性进行测试和调整,根据需要调整水泵的启动和停止频率,以实现恒压供水系统的平稳运行。
6、在启动变频器前,先确保水泵和管路系统处于正常状态,确保没有漏水和杂物堵塞等问题。
7、启动变频器,观察系统的运行状态,包括水泵的转速、水压和流量等参数,确保其符合设计要求。
8、在设定的负载条件下,进行稳态和瞬态的调试,观察系统的响应和稳定性,确保其符合恒压供水系统的要求。
9、对系统进行长时间的运行测试,观察其在不同负载条件下的工作性能,确保其稳定性和可靠性。
10、对调试完成的变频器恒压供水系统进行总结和记录,包括参数设定、运行情况和问题解决等,以便今后的运维和维护工作。
恒压供水变频器设置方法介绍

恒压供⽔变频器设置⽅法介绍在很多的⼯业场所,为了能够做到有效的⽔供应,这时候就需要⽤到恒压供⽔变频器。
这种供⽔器是专门⽤于恒压供⽔⽔泵变频控制器,可以做到供⽔系统运⾏平稳可靠,能够实现⽆⼈供⽔的机器。
那么接下来⼩编就恒压供⽔变频器设置⽅法做⼀个简单的介绍,供⼤家在实际⽣活的时候参考使⽤。
⼀、恒压供⽔变频器的设置前准备:⾸先⼩编为⼤家介绍⼀下恒压供⽔变频器设置前的准备⼯作,⼀般来说可以根据说明书所⽰的电路图,然后连接空⽓开关,电源,漏电开关,等⼀系列开关,然后看到数码管上显⽰的字母是0.0。
这时候⼤家再关掉电源将电源灯熄灭,然后再连接电器,看看我们的恒压变频控制器的接地端⼦是否可靠?这不⼤家必须要仔细的检查,然后⼤家再看看压⼒表上的远程压⼒表,是否安装在⽔泵的出⽔管上。
这时候可以直观地输出我们现在的恒压压⼒值,也可以输出相应的电信号。
如果所有的技术参数与说明书上是⼀致的,那么说明调试准备⼯作已经完毕。
⼆、恒压供⽔变频器的设置:接下来⼩编为⼤家介绍⼀下恒压供⽔变频器的设置调试。
如果所有的恒压变频器的接线是没有错误的,这时候⼤家就可以合上开关和漏电开关。
检查⼀下⽔泵的转向,和反向,是否改变电机的相序,然后⼤家再按运⾏键,到时候时针⽅向旋转键盘的战友的时候,这时候可以输出频率的最上升值,同时⽤万⽤表的直流电压档测试变频器端⼦的电压值。
等到他的压⼒增加到⼀定程度,这时候就可以设定和点压⼒对液的反馈电压值,按下停⽌键。
三、恒压供⽔变频器的参数设置:最后⼩编为⼤家介绍⼀下恒压供⽔变频器的参数设置,合上开关之后,就会看到恒压供⽔变频器的运⾏指⽰灯会⾮常的亮,这时候⼤家就可以输出0.0Hz-30Hz,然后在根据⽤⽔的情况⾃动进⾏调节,但是要保证出⽔⼝的压⼒恒定为5千克。
变频恒压供⽔原理说明变频恒压供⽔设备利⽤专门为风机、泵类、空⽓压缩机等流量和压⼒控制特点⽽研制的专⽤变频调速器。
利⽤变频器的⼀拖三功能,⽽不采⽤昂贵的PLC就可以⾃动控制泵组的运⾏与退出台数,⽽且内置PID功能与我司开发的专门处理恒压供⽔的控制板,可以⽅便地与远传压⼒表连⽤,同⽽完成供⽔压⼒的闭环控制,在管⽹流量变化时达到稳定供⽔压⼒和节约电能的⽬的。
台达变频器参数设定(绝对可靠)

台达变频器参数设置
00-02参数重置设定初始值0 如需重置设置为9(基底频率为50HZ), 10(基底频率为60HZ)
00-10控制方式初始值0 设定值1 (V/F 控制+編碼器(Encoder)(VFPG) )
00-20 频率指令来源设定初始值0 设定值1(由通讯RS485输入)
00-21 运转指令来源设定初始值0 设定值1(外部端子操作, 键盘Stop无效)
02-00 二线/三线式运转控制初始值0 设定值0 (2线式模式1,电源启动运转控制动作)
02-05 多功能输入指令五(MI5) 初始值0 设定值5(异常复位指令Reset )
02-06多功能输入指令五(MI6) 初始值0 设定值12(输出停止) 09-00通讯地址设定初始值0 设定值3(设定值应与PLC程序相一致)
09-01 COM1 通讯传送速度初始值9.6 设定值19.2(设定值应与PLC程序相一致)
09-03 COM1 超时检出初始值0 设定值1
09-04 COM1 通讯格式初始值1 设定值7(8N2 ASCII格式即8个数据位、无校验位、2个停止位)
1。
恒压供水调试设置文档

恒压供水变频器压力设置调节步骤一、变频器参数设置步骤例:比如欲将正转点动频率由5Hz修改为10Hz步骤(F1.20由5.00Hz修改为10.00Hz)①按编程键进入编程状态,LED显示屏显示F0.00。
②按<< 键可以切换需要更改的百位、十位或者个位。
③键将相应位的数字更改。
显示屏改为显示到F1.20。
④按ENTER 键就能看到对应数字5.00。
⑤按<< 键到“510.00。
⑥按ENTER 键保存F1.20的值并自动显示下一个功能码。
⑦按编程键退出编程状态。
二、恒压供水压力值设置①设置F8.02(压力值百分比):设定压力和压力表量程的百分比。
比如量程为 1.6Mpa(16Kg),要设置0.4Mpa(4Kg)的压力,0.4/1.6=25%,把F8.02设置为25即可。
②设置F8.15(睡眠阀值):给定压力的百分比。
比如设定压力为4Kg,100%就表示睡眠阀值为4KG。
即表示压力达到4Kg后变频器逐渐进入休眠状态。
③设置F8.16(苏醒阀值):给定压力的百分比。
比如设定压力为4Kg,60%就表示睡苏醒阀值为4*60%=2.4Kg。
即表示压力值降到2.4Kg后变频器开始启动。
注:4KW变频器输入压力外部已反向输入,即外部输入10V,变频器实际接收0V。
设置压力按正常设置即可(小值启动大值停止)。
比如:要设置8V(对应0.96Mpa)启动,那变频器设置苏醒阀值对应为2V(0.32Mpa);要设置4V(0.64Mpa)停止,那变频器睡眠阀值就需设置6V(对应压力0.96Mpa)。
变频器恒压供水怎么调试

变频器恒压供水调试教程首先要明白恒压供水系统中的几个参数。
>>>>兆帕与公斤“1兆帕”是压强的单位,即1兆帕=1000000帕的。
一平方米的面积上受到的压力是一牛顿时所产生的压强为一帕斯卡[1Pa=1N/(M×M)]。
而公斤力是力的单位:1公斤力=9.8牛顿。
这是两个不同概念的物理量,没法说“1兆帕等于多少公斤力”。
但彼此有一定的关系:要产生“1兆帕”的压强,需在1平方厘米的面积上,施加的压力约是10公斤。
1公斤压力=0.098兆帕,所以:1兆帕(MPA)≈10.2公斤压力(KG/CM^2)1MPa=10.197公斤/厘米2=101.97m水柱,可以让水升高101.97m。
>>>>变频器中PID的定义PID控制器参数的工程整定,各种调节系统中P.I.D参数经验数据以下参照:温度T: P=20~60%,T=180~600s,D=3-180s压力P: P=30~70%,T=24~180s,液位L: P=20~80%,T=60~300s,流量L: P=40~100%,T=6~60s。
基本的PID算法,需要整定的系数是Kp(比例系数),Ki(积分系数),Kd(微分系数)三个。
这三个参数对系统性能的影响如下:>>>>比例系数Kp① 对动态性能的影响比例系数Kp加大,使系统的动作灵敏,速度加快,Kp偏大,振荡次数加多,调节时间加长。
当Kp太大时,系统会趋于不稳定,若Kp太小,又会使系统的动作缓慢;② 对稳态性能的影响加大比例系数Kp,在系统稳定的情况下,可以减小静差,提高控制精度,但是加大Kp只是减少静差,不能完全消除。
>>>>积分系数Ki① 对动态性能的影响积分系数Ki通常使系统的稳定性下降。
Ki太大,系统将不稳定;Ki 偏大,振荡次数较多;Ki太小,对系统性能的影响减少;而当Ki合适时,过渡特性比较理想;② 对稳态性能的影响积分系数能消除系统的静差,提高控制系统的控制精度。
台达变频器参数设置台达变频器参数设置台达变频器参数...
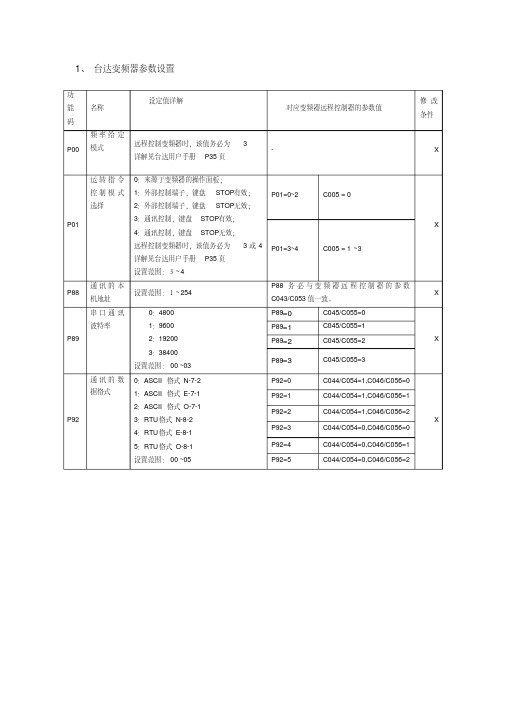
1、台达变频器参数设置功能码 名称 设定值详解 对应变频器远程控制器的参数值 修改条件 P00 频率给定模式 远程控制变频器时,该值务必为 3详解见台达用户手册P35页 - XP01=0~2 C005 = 0P01 运转指令控制模式选择 0:来源于变频器的操作面板; 1:外部控制端子,键盘STOP有效; 2:外部控制端子,键盘STOP无效; 3:通讯控制,键盘STOP有效; 4:通讯控制,键盘STOP无效; 远程控制变频器时,该值务必为3或4详解见台达用户手册P35页 设置范围:3~4P01=3~4 C005 = 1~3XP88 通讯的本机地址 设置范围:1~254P88务必与变频器远程控制器的参数C043/C053值一致。
XP89=0 C045/C055=0P89=1 C045/C055=1P89=2 C045/C055=2P89 串口通讯波特率 0:48001:96002:192003:38400设置范围:00~03P89=3 C045/C055=3XP92=0 C044/C054=1,C046/C056=0P92=1 C044/C054=1,C046/C056=1P92=2 C044/C054=1,C046/C056=2P92=3 C044/C054=0,C046/C056=0P92=4 C044/C054=0,C046/C056=1P92 通讯的数据格式 0:ASCII格式N-7-21:ASCII格式E-7-12:ASCII格式O-7-13:RTU格式N-8-24:RTU格式E-8-15:RTU格式O-8-1设置范围:00~05 P92=5 C044/C054=0,C046/C056=2X功能码 名称 设定值详解 对应变频器远程控制器的参数值 修改条件 F111 设定频率上限 建议最大输出频率的值设为和远程控制器的C023参数的值相同。
默认为50Hz设置范围:0~400HzF111 = C023F004=0~1 C005 = 0F200 启动给定方式选择 0:来源于变频器的操作面板; 1:外部控制端子; 远程控制变频器时,该值可为二者中的一个 设置范围:0~1 F004=2 C005 = 1~3XF204 主频率来源 远程控制变频器时,该值务必为:5由上位机给定 F204务必为 5 XF900 本机地址 设置范围:1~247 F900务必与变频器远程控制器的参数C043/C053值一致。
台达变频器CP2000参数表手册

CP2000参数表手册PARAMETER MANUAL2013-04-5012602604CPP4使用者可快速搜寻各参数的设定范围及出厂设定值,方便自行设定参数。
可以藉由操作面板设定参数、变更设定值及重置参数。
2)「备注」字段,提供使用者在自行设定后,可记录下自行设定值。
3)详尽的参数说明,请参阅使用手册。
00驱动器参数参数码参数名称设定范围初始值备注00-00驱动器机种代码识别4: 230V, 1HP (0.75kW)5: 460 V, 1HP (0.75kW)6: 230V, 2HP (1.5kW)7: 460 V, 2HP (1.5kW)8: 230V, 3HP (2.2kW)9: 460 V, 3HP (2.2kW)10: 230V, 5HP (3.7kW)11: 460 V, 5HP (3.7kW)12: 230V, 7.5HP (5.5kW)13: 460 V, 7.5HP (5.5kW)14: 230V, 10HP (7.5kW)15: 460V, 10HP (7.5kW)16: 230V, 15HP (11kW)17: 460V, 15HP (11kW)18: 230V, 20HP (15kW)19: 460V, 20HP (15kW)20: 230V, 25HP (18.5kW)21: 460V, 25HP (18.5kW)22: 230V, 30HP (22kW)23: 460V, 30HP (22kW)24: 230V, 40HP (30kW)25: 460V, 40HP (30kW)26: 230V, 50HP (37kW)27: 460V, 50HP (37kW)28: 230V, 60HP (45kW)29: 460V, 60HP (45kW)30: 230V, 75HP (55kW)31: 460V, 75HP (55kW)32: 230V, 100HP (75kW)33: 460V, 100HP (75kW)34: 230V, 125HP(90kW)35: 460V, 125HP (90kW)37: 460V, 150HP (110kW)39: 460V, 175HP(132kW)41: 460V, 215HP(160kW)43: 460V, 250HP(185kW)45: 460V, 300HP(220kW)47: 460V, 375HP(280kW)49: 460V, 425HP(315kW)51: 460V, 475HP(355kW)53: 460V, 536HP(400kW)90: 230V, 4HP (3.0kW)91: 460V, 4HP (3.0kW)93:460V, 5.5HP (4.0kW)只读00-01 驱动器额定电流显示依机种显示只读00-02 参数管理设定0:无功能1:参数写保护5 : KWH 显示归零6:重置PLC (包含CANopen主站相关设定)7:重置CANopen从站相关设定9:参数重置(基底频率为50Hz)10:参数重置(基底频率为60Hz)00-03 开机显示画面选择0:F (频率命令)1:H (输出频率)2:U (使用者定义)3:A (输出电流)SC-100-04 多功能显示选择(使用者定义)0:显示驱动器至电机之输出电流(A)1:显示计数值(c)2:显示驱动器实际输出频率(H)3:显示驱动器内直流侧之电压值DC-BUS电压(u)4:显示驱动器之U, V, W输出电压值(E)5:显示驱动器输出之功因角度(n)6:显示驱动器输出之功率kW(P)8:显示驱动器估算之输出转矩N-m%(t)10:显示PID回授值%(b)11:显示AVI1模拟输入端子之讯号值%(1.)12:显示ACI模拟输入端子之讯号值%(2.)13:显示AVI2模拟输入端子之讯号值%(3.)14:显示驱动器功率模块IGBT的温度℃(i.)15:显示驱动器散热片温度℃(c.)16:数字输入 ON/OFF 状态(i)17:数字输出 ON/OFF 状态(o)18:显示正在执行多段速的段速(S)19:数字输入对应之CPU 脚位状态(d.)20:数字输出对应之CPU 脚位状态(O.)25:显示oL counter (h.)26:GFF 的Percent值27:DC-BUS 涟波电压 (r.)28:显示PLC缓存器D1043之值(C)30:使用者定义输出显示(U)31:参数00-05使用者增益显示(K)34: 风扇运转速度(%) (F.)37: 保留38: 驱动器状态(6.)41: KWH显示,单位KWH(J)42: PID目标值,单位%(L)43: PID补偿,单位%(o.)44: PID输出频率, 单位Hz(b.)300-05 实际输出频率比例增益0~160.00 1.0000-06 软件版本仅供读取 #.##00-07 参数保护解碼输入0~655350~4:记录密码错误次数00-08 参数保护密码输入0~655350:未设定密码锁或00-07密码输入成功1:参数已被锁定00-09~00-10保留00-11 速度模式控制选择0:VF(V/F控制)2:SVC(无感测向量控制)00-12~00-15保留00-16 负载选择0:轻负载1:一般负载00-17 载波频率2~15kHz轻载: 1~20hp 8SC-2ㄧ般负载: 0.5~15HP轻载: 1~25hp2~15kHz460V ㄧ般负载: 0.5~20HP轻载: 25~60hp2~10kHz230V ㄧ般负载: 20~50hp轻载: 30~100hp2~10kHz460V ㄧ般负载: 25~75hp6轻载: 75~125hp2~9kHz230V ㄧ般负载: 60~100hp轻载: 125~536hp2~9kHz460V ㄧ般负载: 100~475hp4 00-18 保留00-19 PLC 命令屏蔽(SOOC, SOOF,SOTC )Bit 0: 控制命令强制由PLC控制Bit 1: 频率命令强制由PLC控制00-20 频率指令来源设定(AUTO)0:由键盘输入1:由通讯RS485输入2:由外部模拟输入(参数03-00)3:由外部up/down端子6:由CANopen通讯卡8:由通讯卡(不含CANopen卡)00-21 运转指令来源设定(AUTO)0:数字操作器操作1:外部端子操作,键盘 Stop 无效2:通讯RS-485,键盘 Stop 无效3:由CANopen通讯卡5:由通讯卡(不含CANopen卡)00-22 停车方式0:以减速煞车方式停止1:以自由运转方式停止00-23 运转方向选择0:可正反转1:禁止反转2:禁止正转00-24 通讯频率命令记忆仅供读取只读SC-300-25 使用者定义属性Bit 0~3: 控制使用者定义的小数点数0000b:: 无小数点0001b: 小数点1位0010b: 小数点2位0011b: 小数点3位Bit 4~15 :控制使用者定义的单位显示000Xh : Hz001xh : rpm002xh : %003xh : kg004xH: m/s005xH: kW006xH: HP007xH: ppm008xH: 1/m009xH: kg/s00AxH: kg/m00BxH: kg/h00CxH: lb/s00DxH: lb/m00ExH: lb/h00FxH: ft/s010xH: ft/m011xH: m012xH: ft013xH: degC014xH: degF015xH: mbar016xH: bar017xH: Pa018xH: kPa019xH: mWG01AxH: inWG01BxH: ftWG01CxH: psi01DxH: atm01ExH: L/s01FxH: L/m020xH: L/h021xH: m3/s022xH: m3/h023xH: GPM024xH: CFM00-26 使用者定义的最大值P00-25 Bit 0~3 = 0000b:无功能:0设定范围:1~65535P00-25 Bit 0~3 = 0001b:无功能:0.0设定范围:0.1~6553.5P00-25 Bit 0~3 = 0010b:无功能:0.00设定范围:0.01~655.35P00-25 Bit 0~3 = 0011b:无功能:0.000设定范围:0.001~65.53500-27 使用者定义的设定值仅供读取只读SC-400-28 自动模式切换手动模式Bit0 : 睡眠功能控制位0: 取消睡眠功能1: 睡眠功能与自动模式相同Bit1 : 单位显示控制位0: 单位显示改为 Hz1: 单位显示与自动模式相同Bit2 : PID 控制位0: 取消PID 控制1: PID控制与自动模式相同00-29 LOCAL/REMOTE动作选择0:使用标准的HOA 功能1:Local/Remote 切换不维持频率与运转狀态2:Local/Remote 切换, 维持Remote 的频率与运转狀态3:Local/Remote 切换, 维持Local的频率与运转狀态4:Local/Remote 切换, 维持兩者的频率与运转狀态00-30 频率指令来源设定(HAND)0:由键盘输入1:由通讯RS485输入2:由外部模拟输入(参数03-00)3:由外部up/down端子6:由CANopen通讯卡8:由通讯卡(不含CANopen卡)00-31 运转指令来源设定(HAND)0:数字操作器操作1:外部端子操作,键盘 Stop 无效2:通讯RS-485,键盘 Stop 无效3:由CANopen通讯卡5:由通讯卡(不含CANopen卡)00-32 数字操作器STOP键致能0 : 数字操作器STOP键无效1 : 数字操作器STOP键有效00-33~00-47保留00-48 电流显示滤波 0.001~65.535 0.100 00-49 显示滤波时间 0.001~65.535 0.100 00-50 软件发行日期仅供讀取只读00-51~00-60保留SC-501 基本参数( 表示可在运转中执行设定功能)参数码参数名称设定范围初始值备注01-00最高操作频率50.00~600.00Hz 60.00/ 50.0001-01 电机1输出最高频率设定0.00~600.00Hz60.00/50.0001-02 电机1输出最大电压设定230V机种:0.0V~255.0V460V机种:0.0V~510.0V200.0400.001-03 电机1输出中间1频率设定0.00~600.00Hz 3.0001-04 电机1输出中间1电压设定230V机种:0.0V~240.0V460V机种:0.0V~480.0V11.022.001-05 电机1输出中间2频率设定0.00~600.00Hz 0.5001-06 电机1输出中间2电压设定230V机种:0.0V~240.0V460V机种:0.0V~480.0V2.04.001-07 电机1输出最低频率设定0.00~600.00Hz 0.0001-08 电机1输出最小电压设定230V机种:0.0V~240.0V460V机种:0.0V~480.0V0.00.001-09 启动频率 0.00~600.00Hz 0.50 01-10 上限频率 0.00~600.00Hz 600.00 01-11 下限频率 0.00~600.00Hz 001-12 第一加速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.0~6000.0秒10.0010.001-13 第一减速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.0~6000.0秒10.0010.001-14 第二加速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.0~6000.0秒10.0010.001-15 第二减速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.0~6000.0秒10.0010.001-16 第三加速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.0~6000.0秒10.0010.001-17 第三减速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.0~6000.0秒10.0010.001-18 第四加速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.0~6000.0秒10.0010.001-19 第四减速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.0~6000.0秒10.0010.001-20 寸动(JOG)加速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.0~6000.0秒10.0010.001-21 寸动(JOG)减速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.0~6000.0秒10.0010.001-22 寸动(JOG)频率设定0.00~600.00Hz 6.0001-23 第一段/第四段加减速切换频率0.00~600.00Hz 0.0001-24 S加速起始时间设定1参数01-45=0:0.00~25.00秒参数01-45=1:0.0~25.0秒0.200.2SC-6参数码参数名称设定范围初始值备注01-25 S加速到达时间设定2参数01-45=0:0.00~25.00秒参数01-45=1:0.0~25.0秒0.200.201-26 S减速起始时间设定1参数01-45=0:0.00~25.00秒参数01-45=1:0.0~25.0秒0.200.201-27 S减速到达时间设定2参数01-45=0:0.00~25.00秒参数01-45=1:0.0~25.0秒0.200.201-28 禁止设定频率1上限0.00~600.00Hz 0.0001-29 禁止设定频率1下限0.00~600.00Hz 0.0001-30 禁止设定频率2上限0.00~600.00Hz 0.0001-31 禁止设定频率2下限0.00~600.00Hz 0.0001-32 禁止设定频率3上限0.00~600.00Hz 0.0001-33 禁止设定频率3下限0.00~600.00Hz 0.0001-34 零速模式选择0:输出等待1:零速运转2:Fmin (依据參數01-07、01-41)01-35 电机2输出最高频率设定0.00~600.00Hz60.00/50.0001-36 电机2输出最大电压设定230V机种:0.0V~255.0V460V机种:0.0V~510.0V200.0400.001-37 电机2输出中间1频率设定0.00~600.00Hz 3.0001-38 电机2输出中间1电压设定230V机种:0.0V~240.0V460V机种:0.0V~480.0V11.0/22.001-39 电机2输出中间2频率设定0.00~600.00Hz 0.5001-40 电机2输出中间2电压设定230V机种:0.0V~240.0V460V机种:0.0V~480.0V2.04.001-41 电机2输出最低频率设定0.00~600.00Hz 0.0001-42 电机2输出最小电压设定230V机种:0.0V~240.0V460V机种:0.0V~480.0V0.00.001-43 V/F曲线选择0:一般V/F曲线1:1.5次方V/F曲线2:2次方V/F 曲线01-44 自动加减速设定0:直线加减速1:自动加速,直线减速2:直线加速,自动减速3:自动加减速4:直线,以自动加减速作为失速防止(受限参数01-12~01-21)01-45 加减速及S曲线时间单位0:单位0.01杪1:单位0.1秒01-46 CANopen快速停止时间参数01-45=0:0.00~600.00秒参数01-45=1:0.0~6000.0秒1.001.0SC-702 数字输入/输出参数( 表示可在运转中执行设定功能)参数码参数名称设定范围初始值备注02-00二线/三线式运转控制0:2 线式模式1,电源启动运转控制动作1:2 线式模式2,电源启动运转控制动作2:3 线式,电源启动运转控制动作02-01 多功能输入指令一 (MI1)0:无功能 1 02-02 多功能输入指令二 (MI2)1:多段速指令1 202-03 多功能输入指令三 (MI3)2:多段速指令2 302-04 多功能输入指令四 (MI4)3:多段速指令3 402-05 多功能输入指令五 (MI5)4:多段速指令4 002-06 多功能输入指令六 (MI6)5:异常复归指令Reset 002-07 多功能输入指令七 (MI7)6:JOG指令(依KPC-CC01或外部控制)02-08 多功能输入指令八 (MI8)7:加减速禁止指令 002-26 加装扩充卡之输入端子(MI10)8:第一、二加减速时间切换002-27 加装扩充卡之输入端子(MI11)9:第三、四加减速时间切换002-28 加装扩充卡之输入端子(MI12)10:EF输入(参数07-20) 002-29 加装扩充卡之输入端子(MI13)11:外部中断 B.B.输入(Base Block)02-30 加装扩充卡之输入端子(MI14)12:输出停止 002-31 加装扩充卡之输入端子 13:取消最佳化加减速设定0 (MI15) 14:电机1、2切换15:转速命令来自AVI116:转速命令来自ACI17:转速命令来自AVI218:强制停机(参数07-20)19:递增指令20:递减指令21:PID 功能取消22:计数器清除23:计数输入(MI6)24:FWD JOG指令25:REV JOG指令28:紧急停止(EF1)29:电机线圈Y接确认讯号30:电机线圈△接确认讯号38:写入EEPROM禁止40:强制自由运转停止41:HAND切换42:AUTO切换49:驱动器致能50:从站dEb执行51: PLC 模式切换的选择bit52: PLC 模式切换的选择bit153: CANopen 快速停车的触发54:UVW电磁开关确认55:煞车释放确认信号56: Local/Remote 切换58: 启动火灾模式(withRUN Command)SC-8参数码参数名称设定范围初始值备注59: 启动火灾模式(withoutRUN Command)60:所有电机失效61:电机 #1 失效62:电机 #2 失效63:电机 #3 失效64:电机 #4 失效65:电机 #5 失效66:电机 #6 失效67:电机 #7 失效68:电机 #8 失效02-09 UP/DOWN键模式0:up/down依加减速时间1:up/down定速(参数02-10)02-10 定速UP/DOWN键加减速速率0.01~1.00Hz/ms 0.0102-11 多功能输入响应时间 0.000~30.000秒 0.00502-12 多功能输入模式选择0000h~FFFFh(0:N.O.;1:N.C.)0000h02-13 多功能输出1 RY1 0:无功能 11 02-14 多功能输出2 RY2 1:运转中指示 102-15 多功能输出3 RY3 2:运转速度到达 002-36 加装扩充卡之输出端子(MO10) 或(RA10)3:任意频率到达 1 (参数02-22)02-37 加装扩充卡之输出端子(MO11) 或(RA11)4:任意频率到达 2 (参数02-24)02-38 加装扩充卡之输出端子(MO12) 或(RA12)5:零速(频率命令) 002-39 加装扩充卡之输出端子(MO13) 或(RA13)6:零速含STOP(频率命令)002-40 加装扩充卡之输出端子(MO14) 或(RA14)7:过转矩准位1 002-41 加装扩充卡之输出端子(MO15) 或(RA15)8:过转矩准位2 002-42 加装扩充卡之输出端子(MO16)9:驱动器准备完成 002-43 加装扩充卡之输出端子(MO17)10:低电压警报(LV)(参数06-00)02-44 加装扩充卡之输出端子(MO18)11:故障指示 002-45 加装扩充卡之输出端子(MO19)12:机械煞车释放(参数02-32)02-46 加装扩充卡之输出端子(MO20)13:过热警告(参数06-15)014:软件煞车动作指示(参数07-00)15:PID回授异常16:滑差异常(oSL)17:计数值到达不归0(参数02-20)18:计数值到达(参数02-19)19:基本屏蔽20:警告输出21:过电压警告22:过电流失速防止警告23:过电压失速防止警告24:驱动器操作模式25:正转命令26:反转命令SC-927:高于参数02-33设定电流准位时输出 (>= 02-33)28:低于参数02-33设定电流准位时输出 (< 02-33)29:高于参数02-34的设定频率时输出 (>= 02-34)30:低于参数02-34的设定频率时输出 (< 02-34)31:电机线圈切换Y接命令32:电机线圈切换△接命令33:零速(实际输出频率)34:零速含Stop (实际输出频率)35:错误输出选择 1 (参数06-23)36:错误输出选择 2 (参数06-24)37:错误输出选择 3 (参数06-25)38:错误输出选择 4 (参数06-26)40:运转速度到达含停止44:低电流输出45:UVW电磁开关致能47:停止时煞车闭合50:提供给CANopen当做控制输出51 : 提供给RS485当做控制输出52: 供给通讯卡当做控制输出53:火灾模式指示54:火灾模式旁路指示55:电机 #1输出56:电机 #2输出57:电机 #3输出58:电机 #4输出59:电机 #5输出60:电机 #6输出61:电机 #7输出62:电机 #8输出02-16~02-17保留02-18 多功能输出方向0000h~FFFFh(0:N.O.;1:N.C.)0000h02-19 计数值到达设定 0~65500 0 02-20 指定计数值到达 0~65500 0 02-21 保留02-22 任意到达频率 1 0.00~600.00Hz 60.00/ 50.0002-23 任意到达频率1 宽度 0.00~600.00Hz 2.0002-24 任意到达频率 2 0.00~600.00Hz 60.00/ 50.0002-25 任意到达频率2 宽度 0.00~600.00Hz 2.00 02-32 煞车动作延迟时间 0.000~65.000秒 0.00002-33 多功能输出端子动作之输出电流准位设定0~100% 0SC-1002-34 多功能输出端子动作之输出频率设定0.00~600.00Hz 3.0002-35 重置、电源启动后外部控制运转选择0:无效1:重置后,若运转命令存在,驱动器执行运转02-47~02-49保留02-50 多机能输入端子动作状态监控多机能输入端子动作状态只读02-51 多机能输出端子动作状态监控多机能输出端子动作状态只读02-52 PLC 所使用的外部多功能输入端子监控PLC功能输入端子动作状态只读02-53 PLC所使用的外部多功能输出端子监控PLC功能输出端子动作状态只读02-54 外部端子使用频率命令记忆仅供读取只读SC-11SC-1203 模拟输入/输出参数( 表示可在运转中执行设定功能) 参数码 参数名称 设定范围 初始值备注03-00 AVI1模拟输入功能选择 1 03-01 ACI 模拟输入功能选择003-02 AVI2模拟输入功能选择0:无功能 1:频率命令 4:PID 目标值 5:PID 回授讯号6:正温度系数热敏电阻(PTC)输入值11:PT100热敏电阻值03-03 AVI1 模拟输入偏压 -100.0~100.0% 0 03-04 ACI 模拟输入偏压 -100.0~100.0% 0 03-05 AVI2 模拟正电压输入偏压-100.0~100.0% 003-06 保留03-07 AVI1正负偏压模式 0 03-08 ACI 正负偏压模式 0 03-09 AVI2正负偏压模式 0:无偏压1:低于偏压=偏压 2:高于偏压=偏压 3:以偏压为中心取绝对值 4:以偏压为中心0 03-10 模拟命令偏压动作0:不允许负频率输入,正反转动作由數位操作器或外部端子控制1:允许负频率输入,正频率正转,负频率反转,數位操作器或外部端子控制无法控制正反转0 03-11 AVI1 模拟输入增益 103-12 ACI 模拟输入增益 2 03-13 AVI2 模拟输入增益3 -500.0~500.0% -500.0~500.0%-500.0~500.0%100.0100.0100.0 03-14 AVI2 模拟输入增益4 -500.0~500.0% 100.0 03-15 AVI1模拟输入滤波时间0.00~20.00秒 0.01 03-16 ACI 模拟输入滤波时间0.00~20.00秒 0.01 03-17 AVI2模拟输入滤波时间0.00~20.00秒 0.0103-18 模拟输入相加功能0:不可相加(AVI1、ACI 、AVI2)1:可相加0 03-19 ACI 断线选择 0:无断线选择1:以断线前的频率命令持续运转 2:减速到0H3:立即停车并显示 ACE03-20 多功能输出1 (AFM1) 0:输出频率 (Hz) 0 03-23 多功能输出2(AFM2)1:频率命令 (Hz) 02:电机运转频率(Hz) 3:输出电流 (rms)4:输出电压5:DC Bus 电压6:功率因子7:功率9:AVI1百分比10:ACI 百分比11:AVI2百分比20:CANopen 模拟输出21:RS485 類比输出22: 通讯卡模拟输出23: 固定电压输出03-21 模拟输出一增益(AFM1)0~500.0% 100.0SC-1303-22 模拟输出一反向致能(AFM 1)0:输出电压绝对值1:反向输出0V ;正向输出0-10V2:反向输出5-0V ;正向输出5-10V0 03-24 模拟输出二增益(AFM2)0~500.0% 10003-25 模拟输出二反向致能(AFM 2)0:输出电压绝对值1:反向输出0V ;正向输出0-10V2:反向输出5-0V ;正向输出5-10V 0 03-26 保留03-27 AFM2 输出偏移量 -100.00~100.00% 0.0003-28 AVI1选择 0: 0-10V 1: 0-20mA 2: 4-20mA 003-29 ACI 选择 0: 4-20mA 1: 0-10V2: 0-20mA03-30 PLC 所使用模拟输出端子0000h~FFFFh监控PLC 功能類比输出端子动作狀态0000h03-31 AFM2 输出选择 0 03-34 AFM1 输出选择 0: 0-20mA1: 4-20mA 003-32 AFM1直流输出设定准位0.00~100.00 % 0.0003-33 AFM2 直流输出设定准位0.00~100.00 % 0.0003-35 AFM1输出率波时间 0 ~ 20.00 秒 0.01 03-36 AFM2输出率波时间 0 ~ 20.00 秒 0.01 03-37 ~ 03-49保留 03-50 模拟计算方式 0 ~ 7 7 03-51 AVI1 最低点 当03-28 为0 : 0.00~10.00(V)当03-28不为0 :0.00~20.00(mA)0.00 03-52 AVI1 最低点百分比 0.00~100.00% 0.0003-53 AVI1 中间点 当03-28 为0 : 0.00~10.00(V)当03-28不为0 :0.00~20.00(mA)5.00 03-54 AVI1 中间点百分比 0.00~100.00% 50.0003-55 AVI1 最高点 当03-28 为0 : 0.00~10.00(V)当03-28不为0 :0.00~20.00(mA)10.00 03-56 AVI1 最高点百分比 0.00~100.00% 100.0003-57 ACI 最低点 当03-29 为0 : 0.00~10.00(V)当03-29不为0 :0.00~20.00(mA)4.00 03-58 ACI 最低点百分比 0.00~100.00% 0.0003-59 ACI 中间点 当03-29 为0 : 0.00~10.00(V)当03-29不为0 :0.00~20.00(mA)12.00 03-60 ACI 中间点百分比 0.00~100.00% 50.0003-61 ACI 最高点 当03-29 为0 : 0.00~10.00(V)当03-29不为0 :0.00~20.00(mA)20.00 03-62 ACI 最高点百分比 0.00~100.00% 100.00 03-63 AVI2 最低点电压 0.00~10.00V 0.0003-64 AVI2 最低点百分比 0.00~100.00% 0.00 03-65 AVI2 中间点电压 0.00~10.00V 5.00 03-66 AVI2 中间点百分比 0.00~100.00% 50.00 03-67 AVI2 最高点电压 0.00~10.00V 10.00 03-68 AVI2 最高点百分比 0.00~100.00% 100.00SC-1404-00第一段速0.00~600.00Hz 0.0004-01第二段速0.00~600.00Hz 0.0004-02第三段速0.00~600.00Hz 0.0004-03第四段速0.00~600.00Hz 0.0004-04第五段速0.00~600.00Hz 0.0004-05第六段速0.00~600.00Hz 0.0004-06第七段速0.00~600.00Hz 0.0004-07第八段速0.00~600.00Hz 0.0004-08第九段速0.00~600.00Hz 0.0004-09第十段速0.00~600.00Hz 0.0004-10第十一段速0.00~600.00Hz 0.0004-11第十二段速0.00~600.00Hz 0.0004-12第十三段速0.00~600.00Hz 0.0004-13第十四段速0.00~600.00Hz 0.0004-14第十五段速0.00~600.00Hz 0.0004-15~保留04-4904-50 PLC 暂存位置1 0~65535 0 04-51 PLC 暂存位置2 0~65535 0 04-52 PLC 暂存位置3 0~65535 0 04-53 PLC 暂存位置4 0~65535 0 04-54 PLC 暂存位置5 0~65535 0 04-55 PLC 暂存位置6 0~65535 0 04-56 PLC 暂存位置7 0~65535 0 04-57 PLC 暂存位置8 0~65535 0 04-58 PLC 暂存位置9 0~65535 0 04-59 PLC 暂存位置10 0~65535 0SC-1505-00电机参数自动量测0:无功能1:感应马达之动态测试2:感应马达之静态测试05-01IM电机1满载电流(A)驱动器额定电流的10~120% ###.##05-02 IM电机1额定功率(kW)0~655.35kW ###.##05-03 IM电机1额定转速(rpm)0~655351710(60Hz 4极);1410(50Hz 4极)171005-04 IM电机1极数 2~20 405-05 IM电机1无载电流(A)0~参数05-01出厂设定值 ###.##05-06 IM电机1参数Rs(定子电阻)0.000~65.535Ω0.00005-07 IM 电机 1 参数Rr(转子电阻)0.000~65.535Ω0.00005-08 IM电机 1 参数Lm(磁通互感量)0.0~6553.5mH 0.005-09 IM电机 1 参数Lx(总漏感抗)0.0~6553.5mH 0.005-10~05-12保留05-13 IM电机2满载电流(A)驱动器额定电流的10~120% ###.##05-14 IM电机2 额定功率(kW)0~655.35kW ###.##05-15 IM电机2 额定转速(rpm)0~655351710(60Hz 4极);1410(50Hz 4极)171005-16 IM电机2 极数 2~20 405-17 IM电机2 无载电流(A)0~参数05-01出厂设定值 ###.##05-18 IM电机 2 参数Rs(定子电阻)0.000~65.535Ω0.00005-19 IM电机 2 参数Rr(转子电阻)0.000~65.535Ω0.00005-20 IM电机2 参数Lm(磁通互感量)0.0~6553.5mH 0.005-21 IM 电机 2 参数Lx(转子电阻)0.0~6553.5mH 0.005-22 IM电机1/电机 2 选择1:电机12:电机2105-23 IM电机Y-△切换频率设定0.00~600.00Hz 60.0005-24 IM电机Y-△切换致能0:无功能1:致能05-25 IM电机Y-△切换延迟时间0.000~60.000秒0.20005-26 累计电机运转瓦时低字符(W-sec)只读#.#05-27 累计电机运转瓦时高字符(W-sec)只读#.#05-28 累计电机运转瓦时(W-Hour)只读#.#05-29 累计电机运转瓦时低字符(KW-Hour)只读#.#SC-16参数码参数名称设定范围初始值备注05-30 累计电机运转瓦时高字符(KW-Hour)只读#.#05-31 累计电机运转时间(分钟)00~1439 005-32 累计电机运转时间(天数)00~65535 0SC-1706 保护参数( 表示可在运转中执行设定功能)参数码参数名称设定范围初始值备注06-00低电压位准230V:160.0~220.0VdcFrame E 以上机种(含):190.0~220.0V460V:320.0~440.0VdcFrame E 以上机种(含):380.0~440.0V180.0360.0Frame E 以上机种(含):200.0/400.006-01 过电压失速防止230V:350.0~450.0Vdc460V:700.0~900.0Vdc380.0760.006-02 过电压失速防止动作选择0:使用传统过电压失速防止1:使用智能型过电压失速防止06-03 加速中过电流失速防止位准一般负载:0~160%(100%对应驱动器的额定电流);轻负载:0~130%(100%对应驱动器的额定电流)一般负载:120%;轻负载:120%06-04 运转中过电流失速防止位准一般负载:0~160%(100%对应驱动器的额定电流);轻负载:0~130%(100%对应驱动器的额定电流)一般负载:120%;轻负载:120%06-05 定速运转中过电流失速防止之加减速选择0:依照目前之加减速时间1:依照第一加减速时间2:依照第二加减速时间3:依照第三加减速时间4:依照第四加减速时间5:依照自动加减速06-06 过转矩检出动作选择OT10:不动作1:定速运转中过转矩侦测,继续运转2:定速运转中过转矩侦测,停止运转3:运转中过转矩侦测,继续运转4:运转中过转矩侦测,停止运转06-07 过转矩检出位准OT110~200%(100%对应驱动器的额定电流)12006-08 过转矩检出时间OT10.0~60.0秒 0.106-09 过转矩检出动作选择OT20:不动作1:定速运转中过转矩侦测,继续运转2:定速运转中过转矩侦测,停止运转3:运转中过转矩侦测,继续运转4:运转中过转矩侦测,停止运转06-10 过转矩检出位准OT210~200%(100%对应驱动器的额定电流)12006-11 过转矩检出时间OT20.0~60.0秒 0.106-12 最大电流限制0 ~ 200 15006-13 电子热电驿 1 选择(电机 1)0:恒转矩输出电机1:变转矩输出电机2:无电子热电驿206-14 热电驿 1 作用时间(电机 1)30.0~600.0秒60.006-15 OH过热警告温度准位0.0~110.0℃ 100SC-18参数码参数名称设定范围初始值备注06-16 失速防止限制准位0~100% (参考参数06-03,06-04)5006-17 最近第一异常记录0:无异常记录 0 06-18 最近第二异常记录1:ocA 加速中过电流 006-19 最近第三异常记录2:ocd 减速中过电 006-20 最近第四异常记录3:ocn 恒速中过电流 006-21 最近第五异常记录4:GFF 接地过电流 006-22 最近第六异常记录5:occ IGBT短路保护6:ocS 停止中过电流7:ovA 加速中过电压8:ovd 减速中过电压9:ovn 恒速中过电压10:ovS 停止中过电压11:LvA 加速中低电压12:Lvd 减速中低电压13:Lvn 恒速中低电压14:LvS 停止中低电压15:OrP 输入欠相保护16:oH1 (IGBT过热)17:oH2 (电容过热)18:tH1o (TH1 open:IGBT过热保护线路异常)19:tH2o (TH2 open:散热器保护线路异常)20:保留21:oL (超过150%额定电流一分钟后,驱动器过载)22:EoL1 (电子热动电驿1保护动作)23:EoL2 (电子热动电驿2保护动作)24:oH3 (PTC) 马达过热25:保留26:ot1 过转矩 127:ot2 过转矩 228: Under current 1 (uc1)低电流129:保留30:cF1 内存写入异常31:cF2 内存读出异常32:保留33:cd1 U相电流侦测异常34:cd2 V相电流侦测异常35:cd3 W相电流侦测异常36:Hd0 cc电流侦测异常37:Hd1 oc电流侦测异常38:Hd2 ov流侦测异常39:Hd3 接地电流侦测异常40: 电机参数自动调适失败(AuE)41:AFEPID反馈断线42~47保留48: ACI reference input loss(ACE)49: External fault (EF)外部错误讯号输入50: Emergency stop (EF1)紧急停止SC-19SC-2051: Base Block (BB)外部中断52: Pcode (Password)密码错误53:保留54:cE1 通讯异常55:cE2 通讯异常56:cE3 通讯异常57:cE4 通讯异常58:cE10 通讯 Time Out59:cP10 PU 面板 Time out60:bF 煞车晶体异常61:ydc 电机线圈Y-△切换错误62:dEb 错误63:oSL 转差异常64~65:保留73:S1 外部安全关闸74: FIRE 火灾模式输出79: U PHASE SHORT( U 相短路)80: V PHASE SHORT (V 相短路)81: W PHASE SHORT (W 相短路)82: Output Phase Lose (U 相输出欠相)83: Output Phase Lose (V 相输出欠相)84: Output Phase Lose (W 相输出欠相)101:CGdE CANopen 软件断线1102:CHbE CANopen 软件断线2103:CSyE CANopen 同步错误104:CbFE CANopen 硬件断线105:CIdE CANopen 索引设定错误106:CAdE CANopen 从站站号设定错误107:CFrE CANopen 索引设定超出范围06-23 异常输出选择 1 0 06-24 异常输出选择 2 006-25 异常输出选择 3 0 06-26 异常输出选择 4其数值所对应的Bit 定义如下:Bit 0: 电流 Bit 1: 电压 Bit 2: 过载 Bit 3: 系统 Bit 4: 回授Bit 5: Ext Bit 6: 通讯(参考异常讯息bit 表) 006-27 电子热电驿 2 选择(电机 2)0:恒转矩输出电机1:变转矩输出电机 2:无电子热电驿206-28 热电驿 2 作用时间(电机 2)30.0~600.0秒60.006-29 PTC动作选择0:警告并继续运转1:警告且减速停车2:警告且自由停车3:不警告06-30 PTC 准位 0.0~100.0% 50.0 06-31 故障时频率命令 0.00~655.35Hz 只读06-32 故障时输出频率 0.00~655.35Hz 只读06-33 故障时输出电压值0.0~6553.5 V 只读06-34 故障时直流侧电压值0.0~6553.5 V 只读06-35 故障时输出电流值0.00~655.35 Amp 只读06-36 故障时IGBT温度0.0~6553.5 ℃只读06-37 故障时电容温度 0.0~6553.5℃只读06-38 故障时马达的rpm0~65535 只读06-39 保留06-40 故障时多功能输入端子状态0000h~FFFFh 只读06-41 故障时多功能输出端子状态0000h~FFFFh 只读06-42 故障时驱动器状态0000h~FFFFh 只读06-43 保留06-44 保留06-45 侦测输出欠相处置方式0: 警告并继续运转1: 警告并减速停车2: 警告并自由停车3: 不警告306-46 输出欠相的侦测时间0~65.535秒0.50006-47 侦测电流频带 0~655.35% 1.0006-48 侦测输出欠相的直流制动时间0~65.535秒0.00006-49 保留06-50 侦测输入欠相的时间0.00~600.00秒0.2006-51 保留06-52 侦测输入欠相涟波230V机种: 0.0 ~ 160 Vdc460V机种: 0.0 ~ 320 Vdc30.060.006-53 侦测输入欠相保护之处置方式(orP)0:警告且减速停车1:警告且自由停车06-54 保留06-55 降载波保护设定0:定额定电流,并依照负载电流及温度限制载波1:定载波频率,并依照设定载波限制负载电流2:定额定电流(同设定0),但关闭电流限制06-56 PT100 电压准位10.000~10.000V 5.00006-57 PT100 电压准位20.000~10.000V 7.00006-58 PT100 准位1保护频率0.00~600.00 Hz 0.0006-59 PT处置延迟 0~6000秒 6006-60 GFF 侦测电流准位 (% 变频器额定电流)0.0~6553.5% 60.0SC-2106-61 GFF 低通滤波增益0.00~655.35 sec 0.1006-62 DEB禁能准位230V机种: 0.0~220.0 Vdc460V机种: 0.0~440.0 Vdc150.0/300.006-63 故障1发生时的运转时间(天数)0~65535只读06-64 故障1发生时的运转时间(分钟)0~1439只读06-65 故障2发生时的运转时间(天数)0~65535只读06-66 故障2发生时的运转时间(分钟)0~1439 只读06-67 故障3发生时的运转时间(天数)0~65535 只读06-68 故障3发生时的运转时间(分钟)0~1439 只读06-69 故障4发生时的运转时间(天数)0~65535 只读06-70 故障4发生时的运转时间(分钟)0~1439 只读06-71 低电流设定准位0.0~100.0% 0.0 06-72 低电流侦测时间 0.00360.00秒 0.0006-73 低电流发生后处置方式0 : 无功能1 : 报警且自由停车2 : 报警并依第二减速时间停车3 : 报警且继续运转06-74 保留06-75 保留06-76 保留06-80 火灾模式(Firemode)0: 失能1: 正转运转2: 反转运转06-81 火灾模式操作频率(Hz)0.00 to 600.00Hz 60.0006-82 火灾模式,旁路(Bypass) 致能0: 关闭旁路1: 启动旁路06-83 火灾模式,旁路(Bypass) 延迟时间0.0 to 6550.0 sec 0.006-84 火灾模式的自动重启动计数器0~10 006-85 自动重启动计数器时间0.0 to 6000.0 sec 60.0SC-2207 特殊参数( 表示可在运转中执行设定功能)参数码参数名称设定范围初始值备注07-00软件煞车晶体动作准位设定230V系列:350.0~450.0Vdc460V系列:700.0~900.0Vdc380.0760.007-01 直流制动电流准位 0~100% 007-02 启动时直流制动时间 0.0~60.0秒 0.0 07-03 停止时直流制动时间 0.0~60.0秒 0.0 07-04 直流制动起始频率 0.00~600.00Hz 0.0007-05 电压上升增益 1~200% 10007-06 瞬时停电再启动0:停止运转1:由停电前速度作速度追踪2:从最小输出频率作速度追踪07-07 允许停电时间 0.1~20.0秒 2.0 07-08 B.B.中断时间 0.1~5.0秒 0.5 07-09 速度追踪最大电流 20~200% 5007-10 B.B.动作选择0:停止运转1:由BB前的速度作速度追踪2:从最小输出频率作速度追踪07-11 异常再启动次数 0~10 007-12 启动时速度追踪0:不动作1:从最大输出频率作速度追踪2:由启动时的马达频率作速度追踪3:从最小输出频率作速度追踪07-13 瞬时停电减速时间选择(DEB 功能:Deceleration EnergyBackup)0 : 失效1:依照第一减速时间2:依照第二减速时间3:依照第三减速时间4:依照第四减速时间5:系统减速6:自动减速7:系统现性与自动07-14 DEB 回归时间 0.0~25.0sec 0.0 07-15 齿隙加速时间 0.00~600.00sec 0.0007-16 齿隙加速频率 0.00~600.00Hz 0.0007-17 齿隙减速时间 0.00~600.00sec 0.0007-18 齿隙减速频率 0.00~600.00Hz 0.0007-19 冷却散热风扇控制方式0:风扇持续运转1:停机运转一分钟后停止2:随驱动器运转/停止动作3:侦测散热片温度到达约60℃后再启动4:风扇不运转07-20 紧急或强制停机的减速方式0:以自由运转方式停止1:依照第一减速时间2:依照第二减速时间3:依照第三减速时间4:依照第四减速时间5:系统减速6:自动减速07-21 自动节能设定0:关闭1:开启07-22 节能增益 10~1000% 10007-23 自动调节电压(AVR)0:开启AVR功能1:关闭AVR功能2:减速时,关闭AVR功能07-24 转矩补偿滤波时间(V/F及SVC控制模式)0.001~10.000秒0.020SC-23参数码参数名称设定范围初始值备注07-25 滑差补偿的滤波时间(V/F及SVC控制模式)0.001~10.000秒0.10007-26 转矩补偿增益(V/F控制模式)0~10 007-27 滑差补偿增益(V/F及SVC控制模式)0.00~10.00 0.0007-28 保留07-29 滑差偏差准位 0.0~100.0% 0.007-30 滑差偏差检测时间 0.0~10.0秒 1.007-31 滑差值偏差检出选择0:警告并继续运行1:警告并减速停车2:警告并自由停车3: 不警告07-32 振荡补偿因子 0~10000 100007-33 恢复异常再起动次数设定值的时间00~6000.0秒60.0SC-2408 高功能PID参数( 表示可在运转中执行设定功能)参数码参数名称设定范围初始值备注08-00PID回馈端子选择0:无功能1:负回授:由模拟输入(参数03-00)4:正回授:由模拟输入(参数03-00)08-01 P 增益 0.0~100.0 1.008-02 I 积分时间 0.00~100.00秒 1.0008-03 D 微分时间 0.00~1.00秒 0.0008-04 积分上限 0.0~100.0% 100.008-05 PID输出命令限制 0.0~110.0% 100.008-06 PID回授值 0.00~200.00% 只读08-07 一次延迟 0.0~35.0秒 0.0 08-08 回授异常侦测时间 0.0~3600.0秒 0.008-09 回授讯号断线处理0:警告并继续运转1:警告且减速停2:警告且自由停车3:警告且以断线前频率运转08-10 睡眠参考点 0.00~600.00Hz或 0~200.00%0.0008-11 苏醒参考点 0.00~600.00Hz或 0~200.00%0.0008-12 睡眠时间 0.0~6000.0秒 0.008-13 PID回授讯号异常偏差量1.0~50.0% 10.008-14 PID回授讯号异常偏差量检测时间0.1~300.0秒 5.008-15 PID 回授讯号滤波时间0.1~300.0秒 5.008-16 PID 补偿选择0:参数设定1:模拟输入08-17 PID补偿 -100.0~+100.0% 008-18 睡眠功能参考源设定0: 参考PID输出命令1: 参考PID回授讯号08-19 苏醒的积分限制 0.0~200.0% 50.008-20 PID模式选择0:串联1:并联08-21 允许PID控制改变运转方向0:不可以改变运转方向1:可以改变运转方向08-22 苏醒延迟时间 0~600.00sec 0.00SC-2509 通讯参数( 表示可在运转中执行设定功能)参数码参数名称设定范围初始值备注09-00通讯地址1~254 1 09-01 COM1通讯传送速度 4.8~115.2 Kbps 9.609-02 COM1传输错误处理0:警告并继续运转1:警告且减速停车2:警告且自由停车3:不警告并继续运转309-03 COM1逾时检出 0.0~100.0秒 0.009-04 COM1通讯格式0: 7N1 (ASCII)1: 7N2 (ASCII)2: 7E1 (ASCII)3: 7O1 (ASCII)4: 7E2 (ASCII)5: 7O2 (ASCII)6: 8N1 (ASCII)7: 8N2 (ASCII)8: 8E1 (ASCII)9: 8O1 (ASCII)10: 8E2 (ASCII)11: 8O2 (ASCII)12: 8N1 (RTU)13: 8N2 (RTU)14: 8E1 (RTU)15: 8O1 (RTU)16: 8E2 (RTU)17: 8O2 (RTU)109-05~09-08保留09-09 通讯响应延迟时间 0.0~200.0ms 2.009-10 通讯主频 0.00~600.00Hz 60.0009-11 区块传输1 0~65535 010Ch09-12 区块传输2 0~65535 010Dh09-13 区块传输3 0~65535 010Ah09-14 区块传输4 0~65535 010Bh09-15 区块传输5 0~65535 0 09-16 区块传输6 0~65535 0 09-17 区块传输7 0~65535 0 09-18 区块传输8 0~65535 0 09-19 区块传输9 0~65535 0 09-20 区块传输10 0~65535 0 09-21 区块传输11 0~65535 0 09-22 区块传输12 0~65535 0 09-23 区块传输13 0~65535 0 09-24 区块传输14 0~65535 0 09-25 区块传输15 0~65535 0 09-26 区块传输16 0~65535 0 09-27~09-29保留09-30 通讯译码方式0: 使用译码方式11: 使用译码方式2109-31 COM1 协定0: Modbus 4851: BACnet09-32~09-34保留09-35 PLC地址 1~254 209-36 CANopen从站地址1~127 0SC-26。
一看就学会恒压供水变频器设置方法

一看就学会恒压供水变频器设置方法随着国家在供水行业的投资力度加大,水厂运行自动化水平不断提高,PLC在供水行业应用逐步增多。
恒压供水变频器就是采用PLC 作为中心控制单元,利用变频器与PID结合,根据系统状态可快速调整供水系统的工作压力,达到恒压供水的目的,提高了系统的工作稳定性,得到了良好的控制效果以及明显的节能效果。
一些专用的恒压供水变频器,还具备一定的防水、防尘能力。
下面就让小编来向你介绍下恒压供水变频器的相关知识以及恒压供水变频器设置方法。
一、恒压供水变频器工作原理根据用户要求,先设定给水压力值,然后通电运行,压力传感器监测管网压力,并转为电信号送至可编程控制器或微机控制器,经分析处理,将信号传至变频器来控制水泵运行,当用水量增加时,其输出的电压及频率升高,水泵转数升高,出水量增加,当水量减小时,水泵转数降低,减少出水量,使管网压力维持设定压力值,,在多台泵运行时,逐机软启动,由变频转工频至压力流量满足为止,实现了水泵的循环控制,当夜间小流量运行时,可通过变频水泵来维持工作,变频给水泵可以停机保压。
二、恒压供水变频器控制原理1、调速原理交流电机转速特性:n=60f(1-s)/p,其中n 为电机转速,f为交流电频率,s 为转差率,p为极对数。
电机选定之后s 、p则为定值,电机转速n和交流电频率f 成正比,使用变频器来改变交流电频率,即可实现对电机变频无级调速。
2、根据离心泵的负载工作原理可知:流量与转速成正比:Q∝N转矩与转速的平方成正比:T∝N2功率与转速的三次方成正比:P∝N3而且变频调速自身的能量损耗极低,在各种转速下变频器输入功率几乎等于电机轴功率,由此可知在使用变频调速技术供水时,系统中流量变化与功率的关系:P变=N3P额=Q3P额采用出口阀控制流量的方式,电机在工频运行时,系统中流量变化与功率的关系:P阀=(0.4 0.6Q)P额其中,P为功率N为转速Q为流量例如设定当前流量为水泵额定流量的60%,则采用变频调速时P 变=Q3P额=0.216P额,而采用阀门控制时P阀=(0.4 0.6Q)P额=0.76P额,节电=(P阀-P变)/P阀*100%=71.6%。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
台达CP2000变频器恒压供水参数设置台达CP2000变频器是一款常用于恒压供水系统的变频器设备。
恒压供水是通过变频器来控制电机的转速,使得水泵输出的水流保持在一定的压力下稳定运行。
在设置台达CP2000变频器的恒压供水参数时,需要考虑以下几个方面:
1.设置最大输出频率:根据具体的水泵型号和使用需求,设置变频器的最大输出频率,控制水泵的最高转速。
通常,最大输出频率的设置可以根据水泵的额定功率和额定转速来决定。
2.设置最小输出频率:最小输出频率的设置决定了水泵的最低运行速度。
在设置最小输出频率时,需要考虑到水泵的启动和停止问题,以及水泵在低频率下是否能保持稳定的工作状态。
通常,最小输出频率的设置可以在20-30Hz之间。
3.设置过载保护参数:变频器可以通过设置过载保护参数来保护水泵及变频器设备。
过载保护参数包括过载电流、过载频率等。
通过合理设置过载保护参数,可以避免水泵超负荷运行,保护设备安全运行。
4.设置PID控制参数:台达CP2000变频器具有PID控制功能,可以通过PID参数的设置来实现恒压供水系统的精确控制。
PID参数包括比例系数、积分时间、微分时间等。
通过调整PID参数,可以实现恒压供水系统的响应速度和稳定性。
5.设置故障检测和保护功能:变频器设备具有故障检测和保护功能,可以通过设置相应的参数来实现对水泵和变频器的故障检测和保护。
包括过流、过压、欠压等故障保护参数的设置,以及故障报警的设置。
在设置台达CP2000变频器的恒压供水参数时,需要根据具体的应用需求和水泵的工作特性来进行调整。
可以通过台达CP2000变频器的用户手册和参数说明来了解详细的参数设置方法。
并且,在实际应用中,还需要根据水泵的运行情况进行实时调整和优化,确保恒压供水系统的稳定运行。
最后,需要注意,变频器的参数设置需要由专业工程师进行,以确保设备的安全运行和有效控制。