遥操作机器人系统时延控制方法综述
机器人遥操作系统中信息延时的预测研究

y c (k ) = y (k − 1) + γ u c (k − 1)
1
y (k ) = g[w1 x(k ) + w6 xc (k )]
其中 α 、 、 β γ为反馈增益。 w、 w、 w、 w、 w、 w 分别为隐藏层
2 3 4 5 6
到输 出 层、 输 入 层 到隐 藏 层 、 承接 层 xc(k)到 隐藏 层 、 承 接 层 uc(k)
(2)在 时 延 变 化 不 大 , 稳 定 性 比 较 好 的 情 况 下 ,BP 神 经 网 络
θ j =θ j + β ⋅ ∑δk ⋅ vkj ⋅ Yj ⋅ (1−Yj )
w = w +α ⋅ ∑δ ⋅v ⋅ Y ⋅ (1−Y ) ⋅ X
250 个 32 字节的数据包 , 相应的得到 250 个 时延 值 , 我 们用 前 50 个 数据 作 为 学习 Elman 神 经 网络 的 数 据 , 用 前 100 个 数 据 检 验 后 100 个 作 为 检 验 学 习 后 的 Elman 神 经 网 络 的 预 测 能 力 的 数据 , 丢失的数据包的时延值我们采取填补平均时延值的方法 . 本文以 Matlab 为工具进行仿真 , 分 别对 BP 神 经 网络 和 El- man 神经网络对网络时延的预测功能进行了评估 , 在 BP 神经网 络和 Elman 神 经网 络 的 设计 中 , 我 们 利 用 Matlab 工 具 中 自 带 的 函数来建立网络的。其预测结果分别如图 3 、 图 4 所示。
王宏伟 : 硕士研究生 基金项目 : 重庆市科委基金项目 (CSTC2005BB2013) 《 P LC 技术应用 200 例》
265 -
机器人技术
新训练权值。
毕业设计文献阅读分析方案(遥操作机器人的时延控制)

毕业设计文献阅读报告遥操作机器人的时延控制日期:2018 年 1 月 13日一、毕业设计相关问题的研究背景遥操作机器人系统由操作者、主端机器人子系统、通信环节、从端机器人子系统和工作环境组成。
操作者指令通过主端机器人、通信环节和从端机器人作用于环境,对环境的感知信息则经过上述环节返回到主端操作者,使主端操作者有身临其境的感觉,从而有效完成操作任务。
遥操作系统能将人所在的主端的命令和行为传到并作用在远端,实现对远端环境的期望的操作和控制,从而极大地提高操作者的安全性和工作效率,节俭成本,更高效合理地利用人力资源,实现多方协调作业等[1]。
随着遥操作控制技术不断成熟,遥操作机器人系统越来越引起学术界和工业界注意。
由于其应用前景越来越广阔,已经成为当今机器人研究领域的一大热点。
在空间探索、海洋开发、远程作业这些人类难以到达或未知环境中,遥操作系统的必要性不断增强;在高空、深海,核环境、生化环境等这些对人体健康有害的环境中,遥操作系统必不可少;在煤矿、建设、军事战场等恶劣环境中,遥操作系统有很好应用前景。
此外,为了实现在这些环境中的复杂作业,被运行的操作任务包括复杂机械和环境的交互作用,要求操作者具有广泛的经验和直接熟练的知识。
这些技能在现阶段不容易被做成模型。
因此对于非结构环境和动态时变环境中的复杂作业由于受到资金、技术水平和运作的不确定性等方面的限制[2],尤其是工作在危险环境下的机器人,需要人类的不断介入,对遥控装置的作业进行适度的理解、计划和控制。
基于以上原因,遥操作机器人大有用武之地。
1.1、遥操作机器人的发展简况遥机器人技术的发展历程总体上可分为两个阶段:第一阶段是驱动方式的进步,从机械联动发展到电动伺服,基本形式是双向力反应主从操作,应用领域主要是核工业和太空探索;第二阶段是控制方式的进步,八十年代以后,计算机技术、控制理论、人工智能和通讯科学的飞速发展,引导了计算机辅助遥控的出现,即第二代机器人遥操作技术。
遥操作机器人系统时延控制方法研究
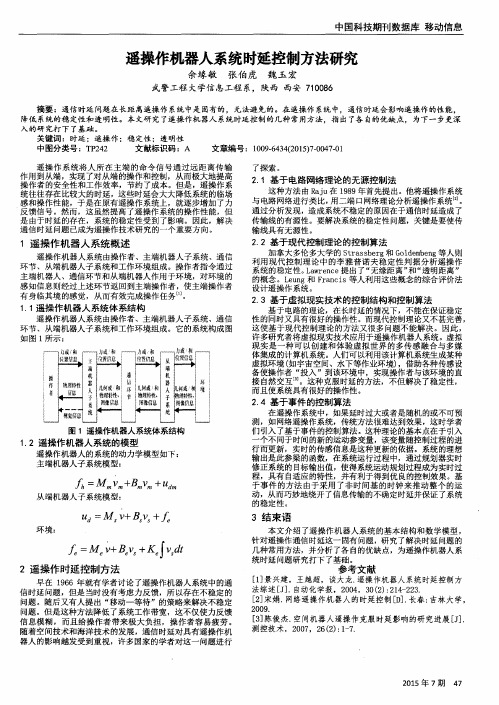
遥操 作系统 将人 所在 主端 的命令 信 号通过 远距 离传 输 作 用到从端 ,实现 了对从端 的操作和 控制,从 而极大地提高 操作者 的安全性和工作 效率,节约 了成本 。但是 ,遥操作系 统往往存在 比较大 的时延 ,这些时延会大 大降低系统 的临场 感 和操作性能 ,于是在原有遥操 作系统上,就逐步增加 了力 反馈 信号 。然而 ,这虽然提高 了遥操作 系统的操作性能 ,但 是 由于时延 的存在 ,系统 的稳 定性受到 了影响 。因此 ,解决 通信 时延 问题 已成为遥操作 技术研究的一个重要方 向。
操作者指令通过主端机器人通信环节和从端机器人作用于环境对环境的感知信息则经过上述环节返回到主端操作者使主端操作者有身临其境的感觉从而有效完成操作任务11遥操作机器人系统体系结构遥操作机器人系统由操作者主端机器人子系统通信环节从端机器人子系统和工作环境组成
中国科技 期刊 数据 库 移动 信息
遥操作机器 入系统时延控制方法研究
3结束语
本文 介绍 了遥操作 机器人系统 的基本结构和数 学模 型 , 针对遥操作通信时延这一 固有 问题 ,研 究了解决时延问题的 几种常用方法 ,并分析 了各 自的优缺点 ,为遥操 作机 器人系 统时延 问题研究打 下了基础 。
f e = Me 1 , + + I v s d t
瑞
} 坚
坚
强 铂
端 — —
M 位 谴 错 船 i
J l = { =
Байду номын сангаас艨 机 抖 精 : 糍特 性 嚣
帆 器
嚣 拦
凡 儿 镌 孵 理 蛾 特 性 和 球 蝌 成 / 和 凡 吧 婀 域 删境 、 带 梅 艘 特镌 、 手 躺 麟% 、 l
遥操作机器人系统的变时延控制

在已有的解决时延问题的众多方案中 , Smith 预估器由于其设计简单 , 调试方便 , 成为近年来解 决遥操作机器人时延问题的热门方法之一 。比较典 型的方法有以下两种 :
4 改进型 Smith 预估器原理
图 1 预测误差图
三条曲线从上到下依次是 RBF 网络 , 自适应 网络 , 某线性预测模型 。由图可见 , RBF NN 的预 测精度最高 , 其预测误差均方根为 01177 1 。在初 始阶段 , 各神经网络的预测输出与实际值大相径 庭 , 以 RBF 为例 , 预测误差甚至可以达到 100 % 。 所以在实际应用中必须考虑系统的鲁棒性问题 。
Teleoperation Control of an Internet2based Robot with Varying Time Delay
LIU Shu2guang , ZHOU Zong2xi , YANG Feng
(School of Electronics and Information , Northwest Polytechnical University , Xiπan 710072 , China)
1) 改进型单 Smith 预估器原理 对于中低精度 遥操 作 机 器 人 , 通 常 对 输 出 信 号 C ( s ) 的 时 延 exp [ - (β+γ) s ]做出预估即可 。即由 RBF NN 预估 出系统的输出信号 C ( s) 的时延值 exp ( - τs) (其真 值 exp [ - (β+ γ) s ]) ,提供给改进型单 Smith 预估 器 ,再由该 Smith 预估器对 C ( s) 的时延进行补偿 。
机器人遥操作技术

机器人遥操作技术在当今科技飞速发展的时代,机器人遥操作技术正逐渐成为一项引人瞩目的前沿领域。
它不仅为我们的生活带来了诸多便利,还在工业、医疗、航天等众多领域发挥着至关重要的作用。
简单来说,机器人遥操作技术就是让操作人员在远处对机器人进行控制和指挥,使其完成各种任务。
想象一下,你可以坐在舒适的办公室里,通过一系列的设备和通信手段,精准地操控千里之外的机器人进行危险的救援工作,或者在复杂的工业生产线上进行精细的操作,这就是机器人遥操作技术的魅力所在。
要实现机器人遥操作,首先需要有可靠的通信链路。
这就好比是机器人与操作人员之间的“桥梁”,负责将操作人员的指令快速、准确地传输给机器人,同时将机器人的状态和感知信息反馈给操作人员。
在过去,由于通信技术的限制,遥操作往往存在较大的延迟和数据丢失,这严重影响了操作的精度和效率。
但随着 5G 等高速通信技术的发展,通信的实时性和稳定性得到了极大的提升,为机器人遥操作技术的发展奠定了坚实的基础。
在遥操作过程中,操作人员如何获取机器人的状态信息也是一个关键问题。
传感器技术在这里发挥了重要作用。
机器人身上配备了各种各样的传感器,如视觉传感器、力传感器、位置传感器等,它们能够实时感知周围环境和自身的状态,并将这些信息转化为电信号传输给操作人员。
操作人员通过这些信息,就能够像身临其境一样了解机器人所处的环境和工作情况,从而做出更加准确的决策和操作指令。
为了让操作人员能够更加直观、自然地对机器人进行控制,人机交互设备也在不断创新和发展。
传统的键盘、鼠标等设备已经无法满足复杂的遥操作需求,取而代之的是更加先进的手柄、数据手套、动作捕捉设备等。
这些设备能够更加精准地捕捉操作人员的动作和意图,并将其转化为机器人的控制指令。
例如,操作人员戴上数据手套,通过手指的弯曲和伸展,就可以控制机器人的机械手进行精细的抓取动作。
然而,机器人遥操作技术并非一帆风顺,它面临着许多挑战。
其中之一就是操作的准确性和稳定性。
时延双边遥操作机器人系统控制方法

通信链路带宽有限,需要设计 高效的数据压缩和传输策略。
03
控制方法研究与实现
时延补偿算法
基于预测的时延补偿
通过预测机器人未来的状态,提前发 送控制指令,减少时延对操作的影响 。
自适应时延补偿
根据网络状况实时调整控制指令的发 送频率和参数,以适应不同时延情况 。
双边协人在远程医疗、深海探测、太空任务等更 多领域的应用可能性。
THANK YOU
未来研究方向与目标
时延优化 多机器人协同
智能化升级 应用场景拓展
进一步研究如何降低双边遥操作系统中的时延,提高系统的实 时性和响应速度。
将所提出控制方法应用于多机器人协同遥操作系统,实现更复 杂、高效的任务执行。
引入人工智能和机器学习技术,提升双边遥操作机器人的自主 性和智能化水平,降低对人工操作的依赖。
02 03
工作原理
操作者通过主端机器人发出控制指令,指令经通信网络传输至从端机器 人,从端机器人根据指令完成相应任务,并将任务执行情况经通信网络 反馈至主端机器人和操作者。
时延问题
由于通信网络的传输时延,操作者从从端机器人接收到的反馈信息存在 延迟,影响遥操作的控制精度和稳定性。
研究背景与意义
遥操作机器人的应用
创新点与贡献
新型时延估计算法
提出了一种新型的时延估计算法,可实时、 准确地估计双边遥操作系统中的时延。
自适应控制策略
设计了一种自适应控制策略,可根据时延估计结果 自动调整控制参数,确保系统的稳定性和性能。
多样化实验验证
通过设计多种实验场景和任务,对所提出控 制方法进行了全面、深入的验证,展示了其 在不同应用场景下的潜力。
02
时延双边遥操作机器 人系统基本原理
空间机器人大时延遥操作技术研究综述
1 空 间 机 器 人 遥 操 作 控 制 方 式 分 类
从2 0世 纪 6 0年代 开 始 应 用 到 现 在 , 间机 器 空 人 的应用 领域 在 不 断 扩 大 , 最 初 的 星球 表 面 探 测 从
到现 在完 成航 天器 在 轨装 配 和 维 修 、 行 各 种 舱 内 进 科学 实验 等 , 任 务 的复杂 度 和精度 都在 不 断提 高 。 其 能够 对环 境进 行感 知 、 高度 自主 、 全代 替人类 从 事 完
机器 人 代 替 宇航 员 完 成 各 种 复 杂 的 空 间 任 务 。 。 空 间机器 人 是在 大气 层 内外从 事空 间作 业 的各 种机
器人 的总称 。 பைடு நூலகம்
上提 出空 问机 器人 遥操 作技 术 的发 展趋 势和研 究方
向, 以及对 我 国空 间 机 器人 大 时延 遥 操 作 技 术 的研
关 键 词 :空 间 机 器 人 ;遥 操 作 ;基 于 虚 拟 预 测 环 境 遥 操 作 ;双 边 遥 操 作
中 图 分 类 号 :T 22 3 P4 . 文 献 标 识 码 :A 文 章 编 号 :10 38 2 1)209—8 0 012 f000 —290
DOI 1 . 8 3 i i n 1 0 — 3 8 2 1 0 0 1 : 0 3 7 / . s . 0 0 1 2 . 0 0. 2. 0 s
作 是 发 挥 空 间 机 器 人 作 用 的关 键 。从 基 于 虚 拟 预 测 环 境 遥 操 作 和双 边 遥 操 作 两 个 方 面 , 国 内 外 空 间 机 器 人 大 时 对 延 遥 操 作 技 术 研 究 进 行 了 系 统 的 综 述 和 深 入 的分 析 , 在 此 基 础 上 提 出 了进 一 步 的发 展 方 向。 并
遥操作时延问题控制方法分析

遥操作时延问题控制方法分析作者:孟蒙宁祎来源:《电脑知识与技术》2018年第21期摘要:目前,虽然遥操作已经被广泛应用于许多领域。
但是由于受到当今计算机处理能力,科学技术发展水平等的限制,遥操作中仍然面临着大时延问题。
因此该文主要针对解决大时延问题的方法展开讨论。
总结传统的经典控制方法的同时,引入模糊PD控制方法并进行介绍。
关键词:遥操作;大时延技术;模糊PD控制中图法分类号:TP242 文献标识码:A 文章编号:1009-3044(2018)21-0009-04Abstract: At present, teleoperation has been widely used in many fields. However, due to the limitations of today's computer processing capabilities, scientific and technological development levels, etc., remote operation still faces large delays. Therefore, this paper focuses on the solution to the problem of large delays. At the same time of summarizing the traditional classical control method, the fuzzy PD control method is introduced and introduced.Key words: remote operation; large delay technique; fuzzy PD control1 背景对遥操作系统的研究最早出现于20世纪的40年代,随着科技的不断进步,对遥操作有了进一步的研究。