遥操作机器人系统主从控制策略
主从式机器人的系统控制策略
主从式机器人的系统控制策略摘要:本文主要针对主从式机器人的系统控制策略展开了探讨,对机器人的控制作了详细的阐述,并为主从式机器人的控制策略及解算作了系统的分析,以期能为有关方面的需要提供有益的参考和借鉴。
关键词:主从式机器人;系统;控制策略0 引言随着科学信息技术的不断应用发展,主从式机器人系统的应用也得到了相应的创新进步。
然而在真正的应用过程中,若要进一步掌握主从式机器人的系统,就必须要采取有效的策略做好系统的控制。
基于此,本文就主从式机器人的系统控制策略进行了探讨,相信对有关方面的需要能有一定的帮助。
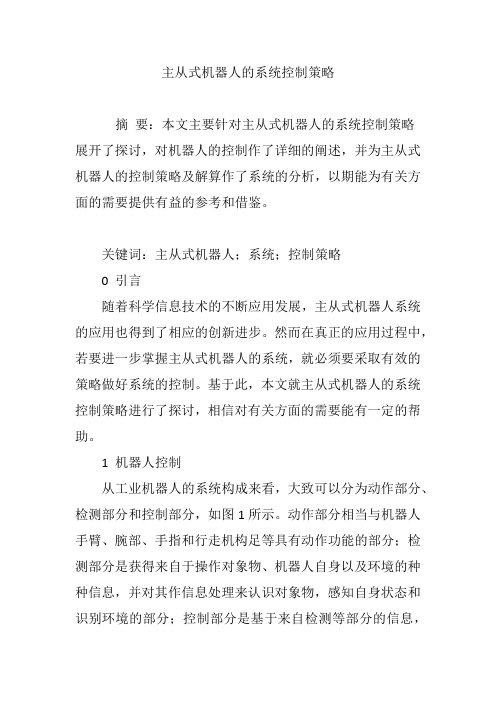
1 机器人控制从工业机器人的系统构成来看,大致可以分为动作部分、检测部分和控制部分,如图1所示。
动作部分相当与机器人手臂、腕部、手指和行走机构足等具有动作功能的部分;检测部分是获得来自于操作对象物、机器人自身以及环境的种种信息,并对其作信息处理来认识对象物,感知自身状态和识别环境的部分;控制部分是基于来自检测等部分的信息,为了使动作部分完成目标操作所承担的控制功能的部分。
图1 机器人系统1.1 机器人控制方式机器人控制器是一个计算机控制系统,它包含高性能计算机,与机器人运动学和动力学建模有密切联系,并以机器人控制技术为理论。
机器人控制器有多种不同控制策略,有非伺服(开环)控制、伺服控制、基于传感信息的控制、最优PID控制、非线性反馈的动态补偿控制、自适应控制、变结构(滑模)控制、模糊控制、分级分散的多臂(或多机器人)协调控制等,但目前实用的多数还是PID伺服控制。
1.2 机器人控制的主要控制变量一台机器人的各关节控制变量。
X(t)表示末端执行装置在空间的实时位置。
只有当关节θ1~θ6移动时,X才变化。
用矢量θ(t)来表示关节变量θ1至θ6。
各关节在力矩C1~C6作用下而运动,这些力矩构成矢量C(t);矢量C (t)由各传动电动机的力矩矢量T(t)经过变速机送到各个关节。
这些电动机在电流或电压矢量V(t)所提供的动力作用下,在1台或多台微处理机的控制下,产生力矩T(t)。
主从式遥微操作机器人力反馈控制系统的研究

RESEA RCH N LATERAL o BI Fo RCE FEED BACK CoN TRoL YS S TEM
o F TELE— I M CRoM ANI PULATI NG RoBoT
SUN ・ i RONG e ・ n LI Pi ・ Lin ng - W ibi - U n- kua CA IHe- o n ・ ga
维普资讯
第 0 年7 4期 4卷 2 2 第月 02
机 器人
R BT OO
VJ2.o4 o Y,20. 1 4 02 . N ul
文章 编 号 :1 0 — 4 6 2 0 ) 4 0 4 - 6 0 20 4 ( 0 2 0 —3 60
主 从 式 遥 微 操 作 机 器 人 力 反 馈 控 制 系统 的研 究
l 弓 言 (n r d cin I I to u t ) o
随着 微 纳 米 技 术 的 迅 猛 发 展 , 作 对 象 越 来 越 操 小 , 1 m 以下 的微 操 作 日益 增 多 , 切 要 求 研 制 在 r a 迫 能够 完 成微 观 精 细作 业 的 微操 作 机 器人 系统 l . 操 - 微 1 ] 作 机 器 人 具 有 微 纳 米 级 的操 作 精 度 和 分 辨 率 , 微 在 型 机 械 零 件 的装 配 、 机 电 系统 ( MS 的组装 、 微 ME ) 大 规 模 集 成 电路 修 补 、 胞操 作 ( 胞 的 融 合 、 离 、 细 细 分 切 割 等 , 因 工 程 ( 因 注 入 、 组 、 移 等 ) 显 微 外 基 基 重 转 、
关键 技 术 之 一 . 多 学 者 在 这 方 面 进 行 了研 究 , 许 日本
主从同构穿刺手术机器人遥操作控制策略研究

主从同构穿刺手术机器人遥操作控制策略研究张忠林;熊璟;张东文【摘要】文章在分析了穿刺机器人系统功能需求的基础上,搭建了主从遥操作系统的半实物仿真平台。
基于等效微分变换的思想,提出雅克比矩阵(Jacobian Matrix)方法和比例微分(Proportional-Derivative,PD)控制律的联合控制方法。
通过设计数字滤波器来消除外科医生的手部低频抖动对穿刺手术机器人精度的影响。
实验结果表明从机器人末端执行器在笛卡尔空间坐标下能够精确快速安全地跟随主机器人末端执行器的位置变化,并且主机器人端的手部抖动能够被消除。
%In this paper, a semi-physical simulation platform of the master-slave robot control simulation system was built based on the analysis on functional requirements of the PHANToM OMNI robot system. Based on differential transformation method, the real-time master-slave control was executedby using Jacobian matrix and proportional-derivative(PD) close-loop control algorithm, and the digital iflter was designed to eliminate effects of surgeons’ hand low-frequency tremors on the precision of the master-slave control. The simulation experimental results demonstrate that the slave robot can follow precisely and quickly movements of the master robot and eliminate hand tremors.【期刊名称】《集成技术》【年(卷),期】2014(000)004【总页数】7页(P81-87)【关键词】穿刺手术机器人;主从控制;雅克比矩阵;PD控制算法;抖动消除【作者】张忠林;熊璟;张东文【作者单位】中国科学院深圳先进技术研究院深圳 518055;中国科学院深圳先进技术研究院深圳 518055;中国科学院深圳先进技术研究院深圳 518055【正文语种】中文【中图分类】TP242遥操作穿刺手术是通过专用手术器械插入患者体内,对患者体内的病灶进行手术操作的外科手术。
二自由度遥操作系统
遥操作机器人位置反馈型双向伺服控制系统研究韩成浩(1,2),赵丁选1,文 广1,高晓红2,陈伟利21.吉林大学 机械科学与工程学院,长春130022;2.吉林建筑工程学院 电气与电子信息工程学院,长春130021摘要:针对目前双向伺服控制策略中存在的主、从手间位置跟随性差,以及抓取刚性物体时主手所受反馈力冲击过大等问题,提出了一种H∞控制的状态观测器补偿位置型双向伺服控制算法,并进行了计算机仿真和2DOF同构型主从遥操作系统的现场试验。
结果表明,本文所提出的状态观测器补偿位置反馈型双向伺服控制策略能有效地改善力觉临场感和主从位置跟随特性,并能很好地解决反馈力瞬间冲击问题,为力觉临场感遥操作机器人走向实用化提供了宝贵经验和关键技术。
关键词:H∞控制策略;位置反馈型控制算法;鲁棒稳定性;力觉临场感中图分类号:TP242.2 文献标识码:AResearch on Tele-operating Robots PositionFeedback Bilateral Servo Control System Han Cheng-hao1,2,Zhao Ding-xuan1, Wen-guang1,Gao Xiao-hong2,Chen Wei-li21. College of Mechanical Science and Engineering, Jilin University, Changchun 130022,China;2. Electrocal and Electronic Information School, Jilin Architecture and Civil Engineering Institute, Changchun130021,ChinaAbstract: To the problems in bilateral servo control strategy, such as the poor following capability between master and slave arms, and too much feedback force imposed on the master hand when fetching strong objects, this paper proposed a bilateral servo control algorithm, and did the experiments of computer simulation and 2DOF master-slave remote control system. The experiments show that the control strategy proposed in this paper can improve effectively the force and the master-slave position following capability, solve sufficiently the instant force of feedback, and provide the precious experiences and key technology for the practice of remote control robots.Key words:H∞control strategy;position feedback control algorithm; robustness; tele-existence1引言1具有力反馈的双向伺服遥操作系统,可以使操作者真实地感受到机器人与被操作物体以及环境的相互作用,提高系统的操作性能,大大提高工作效率,被广泛地应用于人们难以靠近的高温、高压、强辐射、窒息等极限环境。
智能制造中的机器人操作与控制策略研究
智能制造中的机器人操作与控制策略研究智能制造已成为现代工业领域的重要发展方向,其中机器人的操作和控制策略在实现智能制造的过程中起着关键作用。
随着机器人技术的不断进步和应用领域的拓展,如何优化机器人的操作和控制策略,成为了研究人员和企业的重要关注点,旨在提高生产效率和质量,降低成本,并实现智能制造的目标。
一、机器人操作策略机器人操作策略是指在智能制造中,机器人如何根据实际场景与任务需求进行操作的决策和规划。
以下几种常见的机器人操作策略值得研究和应用。
1.路径规划路径规划是机器人操作中的基础问题,主要解决机器人如何在给定的环境中找到一条可行路径,并实现有效的运动。
路径规划可以使用传统的方法,如A*算法、Dijkstra算法等,也可以利用最新的深度学习和机器学习技术进行优化,例如利用强化学习算法来学习机器人在不同环境中的最佳路径选择策略。
2.动态避障在智能制造中,机器人通常需要在存在工人、其他机器人和机械设备的工作环境中进行操作。
因此,机器人操作策略中的动态避障问题是极其重要的。
基于传感器技术的机器人避障方法,如激光雷达、摄像头等,能够实时感知环境中的障碍物并进行规避,保证机器人操作的安全和高效。
3.协作操作机器人在智能制造中往往需要与其他机器人、工人或自动化设备进行协作操作,以实现复杂的任务。
协作操作策略需要解决机器人之间的通信与协调问题,确保各个机器人的动作和操作是协调一致的。
一些先进的协作操作策略包括分工策略、路径规划与资源分配等。
二、机器人控制策略机器人控制策略是指在机器人操作过程中,对机器人的控制方式和方法进行研究和改进,以实现机器人的高效、精确控制。
1.自适应控制自适应控制策略是指机器人能够根据环境和任务需求,实时地调整控制参数和控制策略的能力。
通过传感器对环境的监测和相关算法的设计,机器人可以自主地适应不同场景和任务,并提供最佳控制效果。
2.模型预测控制模型预测控制是一种基于动态系统模型的控制策略。
主从遥操作下双臂机器人的阻抗控制策略研究
主从遥操作下双臂机器人的阻抗控制策略研究
韩昌;周浩;高俊
【期刊名称】《小型微型计算机系统》
【年(卷),期】2024(45)3
【摘要】在遥操作机器人系统中,从端机器人不仅需准确地跟随主端设备的运动,还需与外界环境保持合适接触力,以避免因接触力过大对机器人和环境造成破坏.由于遥操作机器人系统中主从端设备是分离的,要实现遥操作下柔顺接触是极具挑战的.为了提高遥操作机器人系统任务执行的安全性,本文结合运动映射提出一种主从遥操作下阻抗控制策略.首先,通过提出主从端运动映射策略,将主从端设备联系起来,并获得从端机器人运动的目标位姿.接着,为了实现机器人末端执行器与环境的柔顺接触,提出阻抗控制策略,建立机器人与外界环境之间的位置和接触力的动态响应关系.同时,引入虚拟排斥力,让从端机器人的双臂在可行的空间中运动,从而提高了机器人操作的柔顺性和安全性.设计了机器人拖拽和白板擦拭两个实验来验证方法有效性.实验结果表明,所提出方法可实现机器人在具有接触的任务中的柔顺操作,可提高操作的安全性.
【总页数】5页(P636-640)
【作者】韩昌;周浩;高俊
【作者单位】武汉商学院机器人视觉感知与应用学术团队
【正文语种】中文
【中图分类】TP241
【相关文献】
1.基于KUKA工业机器人的遥操作控制系统设计与异构主从控制方法研究
2.主从同构穿刺手术机器人遥操作控制策略研究
3.遥操作机器人系统主从控制策略
4.主从机械手遥操作双边自适应阻抗控制策略
5.水下用机器人遥操作模式下主从端设备空间映射控制算法研究
因版权原因,仅展示原文概要,查看原文内容请购买。
时延双边遥操作机器人系统控制方法

通信链路带宽有限,需要设计 高效的数据压缩和传输策略。
03
控制方法研究与实现
时延补偿算法
基于预测的时延补偿
通过预测机器人未来的状态,提前发 送控制指令,减少时延对操作的影响 。
自适应时延补偿
根据网络状况实时调整控制指令的发 送频率和参数,以适应不同时延情况 。
双边协人在远程医疗、深海探测、太空任务等更 多领域的应用可能性。
THANK YOU
未来研究方向与目标
时延优化 多机器人协同
智能化升级 应用场景拓展
进一步研究如何降低双边遥操作系统中的时延,提高系统的实 时性和响应速度。
将所提出控制方法应用于多机器人协同遥操作系统,实现更复 杂、高效的任务执行。
引入人工智能和机器学习技术,提升双边遥操作机器人的自主 性和智能化水平,降低对人工操作的依赖。
02 03
工作原理
操作者通过主端机器人发出控制指令,指令经通信网络传输至从端机器 人,从端机器人根据指令完成相应任务,并将任务执行情况经通信网络 反馈至主端机器人和操作者。
时延问题
由于通信网络的传输时延,操作者从从端机器人接收到的反馈信息存在 延迟,影响遥操作的控制精度和稳定性。
研究背景与意义
遥操作机器人的应用
创新点与贡献
新型时延估计算法
提出了一种新型的时延估计算法,可实时、 准确地估计双边遥操作系统中的时延。
自适应控制策略
设计了一种自适应控制策略,可根据时延估计结果 自动调整控制参数,确保系统的稳定性和性能。
多样化实验验证
通过设计多种实验场景和任务,对所提出控 制方法进行了全面、深入的验证,展示了其 在不同应用场景下的潜力。
02
时延双边遥操作机器 人系统基本原理
机器人操作系统中的控制策略与规划算法
机器人操作系统中的控制策略与规划算法机器人操作系统(ROS)是一种广泛应用于机器人系统的开源软件框架,它提供了一系列基础设施和工具,用于构建和部署机器人应用。
在机器人的控制过程中,控制策略和规划算法起着关键作用。
本文将重点介绍机器人操作系统中的控制策略和规划算法,并探讨它们在机器人系统中的重要性。
控制策略是指机器人在执行任务时所采取的动作决策方案,它直接影响到机器人的行为和性能。
机器人操作系统提供了多种控制策略,包括开环控制和闭环控制。
开环控制是一种基础的控制策略,它根据预先设定的动作序列控制机器人执行任务。
开环控制适用于一些简单的任务,但它无法适应环境变化和机器人自身状态的变化,容易导致执行误差。
闭环控制则可以根据机器人的传感器信息和当前状态来调整控制信号,从而实现动作的准确控制。
机器人操作系统中的闭环控制通常使用反馈控制方法,其中最常用的是比例-积分-微分(PID)控制器。
PID控制器根据机器人当前的状态误差来调整控制信号,通过不断迭代计算和调整,使机器人的执行效果更准确。
除了控制策略外,规划算法也是机器人操作系统中不可或缺的部分。
规划算法用于确定机器人在特定环境中如何规划路径和执行任务。
根据机器人的动作空间和环境约束,常用的规划算法包括运动规划、路径规划和任务规划等。
运动规划是机器人在指定运动空间内确定一系列运动轨迹的过程。
它可以保证机器人在执行任务时的平滑性和稳定性。
运动规划常用的算法有插值法、样条曲线和逆向运动学等。
路径规划则是确定机器人在复杂环境中如何选择合适的路径避开障碍物。
路径规划算法可以分为全局路径规划和局部路径规划两种。
全局路径规划主要根据机器人的起始点和目标点,使用图搜索或优化方法找到最佳路径。
局部路径规划则负责在行进过程中避开障碍物或调整路径。
任务规划是一种高级的规划算法,它能够根据机器人的任务目标和约束条件生成一个完整的执行计划。
任务规划往往需要考虑机器人的能力和资源限制,并对多个任务进行优化调度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
t r e a t me n t a n d d e e p — s e a i f e l d . T h e c o n t r o l s t r a t e y g o f ma s t e r — s l a v e r o b o t s y s t e m i s s t u d i e d o n t h e b a s i s o f s u mma r i -
Abs t r a c t:I n r e c e n t y e a r s,t h e ma s t e r - s l a v e r o b o t s y s t e m i s wi de l y u s e d i n ma n y di f f e r e n t ie f l d s ,s u c h a s me d i c a l
S h e n g G u o d o n g , C a o Q i x i n
( S c h o o l o f Me c h a n i c a l E n g i n e e r i n g ,S h a h g h a i J i a o T o n g U n i v e r s i t y ,S h a n g h a i 2 0 0 2 4 0, C h i n a )
第2 7卷第 5期
江 苏科 技大 学学 报 ( 自然科 学版 )
V o 1 . 2 7 N o . 5
O c t ・ 2 0 1 3
2 0 1 3年 1 0月 J o u r n a l o f J i a n g s u U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y( N a t u r a l S c i e n c e E d i t i o n )
人系统的控制策略. 采用增量式位置控制 , 易于建立主端与从端的工作空间映射 , 并增加位 置反馈提 高系统 的控 制精度 ; 解 决 了主从 运动 比例变化的问题 ; 并通过搭建的主从机器人系统对位置控制策略进行验证 , 结果表 明了系统位置 控制策略 的 准确性 和实时性. 将 主从位 置误差引入系统的力反馈控 制策略 , 分析系统 的稳定性 , 并通 过 MA T L A B / S i m u l i n k对力 反馈 策 略进 行仿 真及实验验证 , 仿 真 与实验结果验证 了所建立控制策 略的有效性. 关键 词 : 机器人 系统 ; 主从控制 ;力反馈 ; 位 置控 制
z i n g t h e e x i s t i n g r e s e a r c h r e s u l t s .I n c r e me n t a l p o s i t i o n c o n t r o l s t r a t e g y i s us e d t o e s t a b l i s h t h e ma s t e r — s l a v e wo r k— s p a c e ma p p i n g c o we e n i e n t l y,p o s i t i o n ̄e d b a c k i s a d o p t e d t o i mpr o v e c o n t r o l p r e c i s i o n o f t h e s y s t e m ,t he p r o bl e m o f mo t i o n r a t i o c ha n g e i s s o l v e d a n d t h e p o s i t i o n c o n t r o l s t r a t e g y i s p r o v e d t h r o ug h t h e b u i l t s y s t e m.Th e r e s u l t s
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 3— 4 8 0 7 . 2 0 1 3 . 0 5 . 0 1 5
遥 操 作 机 器 人 系统 主 从 控 制 策 略
盛 国栋 ,曹其 新
( 海交通大学 机械与动力工程学 院, 上海 2 0 0 2 4 0 ) 摘 要: 近年来主从式机器人 系统被广 泛应 用在医疗 、 深海 等非结构性环境 . 在现有研究成果 的基础上 , 研 究了主从 式机器
e g y,t h e s t a b i l i t y o f t h e s y s t e m i s a n a l y z e d a n d t h e e f f e c t i v e n e s s o f t he f o r c e c o n t r o l s t r a t e y g i s t e s t e d t h r o ug h MATLAB /Si mu l i n k a n d e x p e r i me nt . Ke y wor ds:r o b o t s y s t e m ;ma s t e r - s l a v e c o n t r o l ;f o r c e  ̄e d b a c k;po s i t i o n c o n t r o l
中图分类号 : T P 2 4 2 . 3 文献标志码 : A 文章 编 号 : 1 6 7 3— 4 8 0 7 ( 2 0 1 3 ) 0 5— 0 4 9 3—0 5
Co nt r o l s t r a t e g y o f ma s t e r - s l a v e r o bo t s y s t e m