51单片机程序 MAX7219
max7219资料及电路图
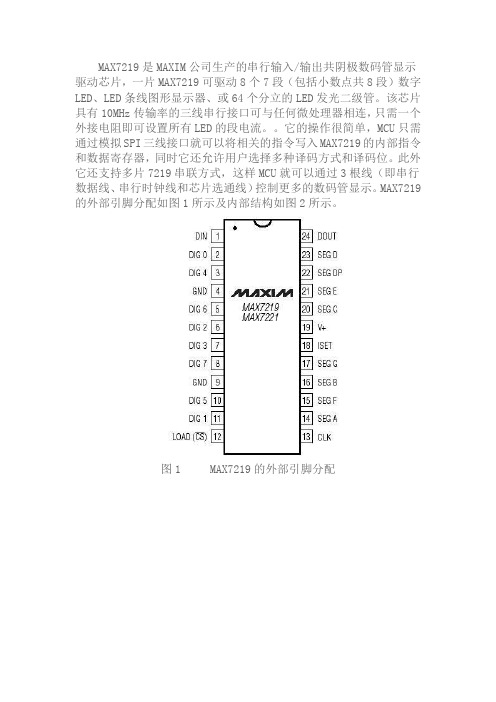
MAX7219是MAXIM公司生产的串行输入/输出共阴极数码管显示驱动芯片,一片MAX7219可驱动8个7段(包括小数点共8段)数字LED、LED条线图形显示器、或64个分立的LED发光二级管。
该芯片具有10MHz传输率的三线串行接口可与任何微处理器相连,只需一个外接电阻即可设置所有LED的段电流。
它的操作很简单,MCU只需通过模拟SPI三线接口就可以将相关的指令写入MAX7219的内部指令和数据寄存器,同时它还允许用户选择多种译码方式和译码位。
此外它还支持多片7219串联方式,这样MCU就可以通过3根线(即串行数据线、串行时钟线和芯片选通线)控制更多的数码管显示。
MAX7219的外部引脚分配如图1所示及内部结构如图2所示。
图1 MAX7219的外部引脚分配图2 MAX7219的内部引脚分配各引脚的功能为:DIN:串行数据输入端DOUT:串行数据输出端,用于级连扩展LOAD:装载数据输入CLK:串行时钟输入DIG0~DIG7:8位LED位选线,从共阴极LED中吸入电流SEG A~SEG G DP 7段驱动和小数点驱动ISET:通过一个10k电阻和Vcc相连,设置段电流MAX7219有下列几组寄存器:(如图3)MAX7219内部的寄存器如图3,主要有:译码控制寄存器、亮度控制寄存器、扫描界限寄存器、关断模式寄存器、测试控制寄存器。
编程时只有正确操作这些寄存器,MAX7219才可工作。
图 3 MAX7219内部的相关寄存器分别介绍如下:(1)译码控制寄存器(X9H)如图4所示,MAX7219有两种译码方式:B译码方式和不译码方式。
当选择不译码时,8个数据为分别一一对应7个段和小数点位;B译码方式是BCD译码,直接送数据就可以显示。
实际应用中可以按位设置选择B译码或是不译码方式。
图4 MAX7219的译码控制寄存器(2)扫描界限寄存器(XBH)如图5所示,此寄存器用于设置显示的LED的个数(1~8),比如当设置为0xX4时,LED 0~5显示。
MAX7219中文资料-附有程序

MAX7219是MAXIM公司生产的串行输入/输出共阴极数码管显示驱动芯片,一片MAX7219可驱动8个7段(包括小数点共8段)数字LED、LED条线图形显示器、或64个分立的LED发光二级管。
该芯片具有10MHz传输率的三线串行接口可与任何微处理器相连,只需一个外接电阻即可设置所有LED的段电流。
它的操作很简单,MCU只需通过模拟SPI三线接口就可以将相关的指令写入MAX7219的内部指令和数据寄存器,同时它还允许用户选择多种译码方式和译码位。
此外它还支持多片7219串联方式,这样MCU就可以通过3根线(即串行数据线、串行时钟线和芯片选通线)控制更多的数码管显示。
MAX7219的外部引脚分配如图1所示及内部结构如图2所示。
图1 MAX7219的外部引脚分配
图2 MAX7219的内部引脚分配
各引脚的功能为:
DIN:串行数据输入端
DOUT:串行数据输出端,用于级连扩展
LOAD:装载数据输入
CLK:串行时钟输入
DIG0~DIG7:8位LED位选线,从共阴极LED中吸入电流SEG A~SEG G DP 7段驱动和小数点驱动ISET:通过一个10k电阻和Vcc相连,设置段电流MAX7219有下列几组寄存器:(如图3)。
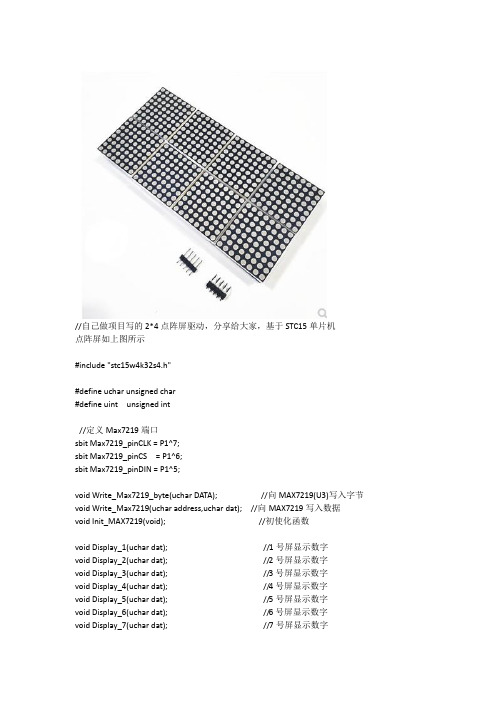
点阵屏驱动程序(MAX7219)
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Max7219_pinCS=1;
Write_Max7219(0,0); //清除缓冲区数据,消除显示误差
}
}
void Display_4(uchar dat)
{
uchar i;
{0x00,0x70,0x88,0x80,0x80,0x80,0x88,0x70},//C16
};
//--------------------------------------------
//功能:向MAX7219(U3)写入字节
//入口参数:DATA
//出口参数:无
//说明:
void Write_Max7219_byte(uchar DATA)
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Max7219_pinCS=1;
Write_Max7219(0,0); //清除缓冲区数据,消除显示误差
Write_Max7219(7,0);//清除缓冲区数据,消除显示误差
Write_Max7219(8,0);//清除缓冲区数据,消除显示误差
}
/***************************************************/
void Display_1(uchar dat)
{
Write_Max7219_byte(0);
MAX7219单片以及级联驱动程序

MAX7219单片以及级联驱动程序2011-03-20 09:40说明一下:这个word版式是从百度上下载的,在原版中,作者只是写了驱动一片MAX7219的程序。
本人作为菜鸟,第一次使用MAX7219就用了两片级联来驱动15个数码管,按照原版程序驱动一片MAX7219是没有问题的,但是,驱动两片MAX7219就不行了。
自己先认真看了MAX7219的DataSsheet,因为英语是个二把刀,看的迷迷糊糊,似懂非懂(可见英语还是很重要的),又在网上搜索也没发现有正确的程序(都是有点儿问题,上网贴出来请教各位大虾的),没办法只能自力更生了,终于调出来了。
将原版增删修改,传上来共享,希望对以后某位菜鸟第一次使用MAX7219时有所帮助啦,嘿嘿!/**************************************************************** *常用符号定义******************************************************************/#define uchar unsigned char/**************************************************************** *定义MAX7219寄存器******************************************************************/#define REG_NO_OP 0x00 //定义空操作register#define DIG_1 0x01 // 定义数码管1 register#define DIG_2 0x02 // 定义数码管2 register#define DIG_3 0x03 // 定义数码管3 register#define DIG_4 0x04 // 定义数码管4 register#define DIG_5 0x05 // 定义数码管5 register#define DIG_6 0x06 // 定义数码管6 register#define DIG_7 0x07 // 定义数码管7 register#define DIG_8 0x08 // 定义数码管8 register#define REG_DECODE 0x09 // 定义解码控制register#define REG_INTENSITY 0x0a // 定义显示亮度register#define REG_SCAN_LIMIT 0x0b // 定义扫描限制register#define REG_SHUTDOWN 0x0c // 定义"shutdown"模式register#define REG_DISPLAY_TEST 0x0f // 定义"display test"模式register#define INTENSITY_MIN 0x00 // 定义最低显示亮度#define INTENSITY_MAX 0x0f // 定义最高显示亮度/****************************************************************** * 定义硬件引脚连接******************************************************************/#define DATA P2^3; //定义P3_5连接MAX7219 DATA引脚#define CLK P2^5; //定义P3_4连接MAX7219 CLK 引脚#define CS P2^4; //定义P3_3连接MAX7219 CS 引脚/***************************************************************** * 共阴极七段数码管显示对应段查询表(数字0-9分别对应code_table[0]-[9])***********************************************************/uchar code code_table[10]={0x7e,0x30,0x6d,0x79,0x33,0x5b,0x5f,0x70,0x7f,0x7b}; /*采用数组*//****************************************************************** * MAX7219_Send()描述: 向MAX7219传送一字节数据Arguments : dataout = data to sendReturns : none******************************************************************/ void send (uchar datain){char I,temp;for (i=8; i>0; i--){CLK=0; // CLK 置低temp=datain&0x80;if (temp==0x80) // 判断并输出一位DATA=1; // 输出"1"else // 或DATA=0; // 输出"0"datain<<=1; //datain左移位,以便再次与0x80按位与CLK=1; // CLK 置高}}/**************************************************************** * MAX7219_Write()/MAX7219_Write_1()描述: 向 MAX7219 写命令Arguments : reg_number = register to write todataout = data to write to MAX7219Returns : none************************************************************** */ void MAX7219_Write (uchar add1, uchar dat1) //向第一片MAX7219写数据{CS=0; // CS置低选通MAX7219send(add1); // 写register number 到MAX7219send(dat1); // 写data 到MAX7219CS=1; // 利用CS上升沿锁存以上移位进输入的16位数据}void MAX7219_Write_1(uchar add2,uchar dat2) //向第二片MAX7219写数据{CS=0;sent(add2);sent(dat2);CLK=1; // 第16.5个时钟周期,数据从第一片MAX7219的DOUT端开始输出sent(REG_NO_OP); //对第一片MAX7219进行空操作,sent(0x00);CS=1;}/******************************************************************** MAX7219_DisplayChar()描述: 使某一位显示一个数字Arguments : digit = digit number (0-7)character = character to display (0-9, A-Z)Returns : none****************************************************************/void MAX7219_DisplayChar (char digit, char character){MAX7219_Write(digit, character);}PS:这个函数可以不要,直接调用写数据函数就可以了(原版)/******************************************************************** MAX7219_Clear()/MAX7219_clear_1()描述: 清除所有位的显示Arguments : noneReturns : none*****************************************************************/ void MAX7219_Clear (){uchar i;for (i=0; i < 8; i++)MAX7219_Write(i, 0x00); // 清除第一片MAX7219所有位的显示}void MAX7219_Clear_1(){uchar i;for(i=1;i<=8;i++)MAX7219_Write_1(i,0x00); //清除第二片MAX7219所有位的显示}PS:可以两片一起清楚数据,但建议分开较好。
MAX7219在单片机系统显示电路中的应用
摘要:介绍8位串行LED显示驱动 ̄MAX7219的特性,并给出了单片机系统中MAX7219与MCS--51的硬件接口设计,以及相应的软件流程图和编程实现。
关键词:MAX721;单片机;显示电路单片机系统通常需要有LED对系统的状态进行观测,而很多工业控制用单片机FIMCS51系列本身并无显示接口部分,需要外接显示的译码驱动电路。
在MCS51单片机的控制系统中,采用MAxIM公司的MAX7219构成显示接口电路,仅需使用单片机3个引脚,即可实现对8位LED数码管的显示控制和驱动,线路简单,控制方便。
1MAx7219与单片机的连接MAX7219与MCS一51单片机连接时可根据具体的系统要求和系统资源占用情况选用2种驱动方式:串行口移位驱动MAX7219或I/0口模拟三线协议时序驱动MAX7219。
通常单片机系统的串口要用作其他用途,比如和上位机联机通信等。
故本系统利用单片机的I/O口来模拟MAX7219的时序,应用电路如图1所示。
其中,P2.0作串行数据输出,连接 ̄IDIN端,P2.1和P2.2连扫描电路选通某字时,相引脚DIG×为低电平。
显示接至CLK和LOAD,通过程序分别模拟MAX7219的时钟数据串行输入MAX7219,移位存入数字寄存器,片内多脉CLK及数据加载LOAD信号。
ISET管脚接l0kQ电阻路扫描电路顺序扫描,分时选通各字,被选通字的引脚用于限定峰值段电流。
置为低电平,LED发光显示数字,未选通的字引脚保持本系统的设计中,只需要5个LED,所以DIG5~DIG7高电平。
未用悬空。
显示电路中,所有LED显示器的同名段(a~f,系统设计中,应用MAX7219芯片时需要注意如下dp)连接在一起并与MAX7219的同名段引脚(SA~SG,几个关键问题:SDP)H连,各LED显示器的共阴极分别与MAX721的相(1)3根信号线。
应字引脚(DIG0一DIG4)相连,以实现位选,当MAX7219在强干扰环境中,如大功率电机的启停或高压发生过程中,干扰源可能通过供电电源或3根信号线串入显示电路,造成显示器的不稳定,从而出现段闪烁、显示不全、甚至全暗或全亮的现象。
单片机时钟设计MAX7219驱动数码管

单片机时钟设计MAX7219驱动数码管#include#define uchar unsigned char#define uint unsigned intsbit DIN=P0^1; //"显示串行数据输入端"sbit LOAD=P0^2; //"显示数据锁存端"sbit CLK=P0^3; //"显示时钟输入端"#define DecodeMode 0x09 //"译码模式"#define Intensity 0x0a //"亮度"#define ScanLimit 0x0b //"扫描界限"#define ShutDown 0x0c //"掉电模式"#define DisplayTest 0x0f //"显示测试"uchar code seg_data[]={0x7E,0x30,0x6D,0x79,0x33,0x5B,0x5F,0x70,0x7F,0x7B}; //"0,1,2,3,4,5,6,7,8,9" uchar disp_buf[5];uchar code bit_tab[]={0x01,0x02,0x03,0x04};uchar hour=12,min=0,sec=0,count=0;bit flag;void delay (uint a) //" 毫秒延时函数"{uint i;while( --a != 0){for(i = 0; i < 110; i++);}}void write_max7219_byte(uchar temp){uchar i;for(i=0;i<8;i++){CLK=0;DIN=(bit)(temp&0x80);temp<<=1;CLK=1;}}void write_max7219(uchar address,uint dat){LOAD=0;write_max7219_byte(address);write_max7219_byte(dat);LOAD=1;}void Init_max7219 (void){write_max7219(ScanLimit,0x07); //*"设置扫描界限"*/write_max7219(DecodeMode,0xff); //*"设置译码模式"*/ write_max7219(Intensity,0x04); //*"设置亮度"*/write_max7219(ShutDown,0x01); //*"设置电源工作模式"*/ write_max7219(DisplayTest,0x01);delay(5);write_max7219(DisplayTest,0x00);}void conv(uchar in1,in2){disp_buf[0]=in1/10;disp_buf[1]=in1%10;disp_buf[2]=in2/10;if(flag==0)disp_buf[3]=(in2%10)|0x80;elsedisp_buf[3]=in2%10;}void display( ){write_max7219(bit_tab[0],disp_buf[0]); write_max7219(bit_tab[1],disp_buf[1]); write_max7219(bit_tab[2],disp_buf[2]); write_max7219(bit_tab[3],disp_buf[3]); }void init(){TMOD=0x01;TH0=(65536-50000)/256;TL0=(65536-50000)%256;EA=1;ET0=1;TR0=1;}void timer0() interrupt 1{TH0=(65536-50000)/256;TL0=(65536-50000)%256;count++;if(count==20){count=0;flag=~flag;sec++;if(sec==60) {sec=0;min++;if(min==60) {min=0;hour++;if(hour==24) {hour=0;min=0;sec=0;}}}}}void main() {init();Init_max7219 ( ); while(1){conv(hour,min); display( );}}。
max7219驱动数码管程序(51单片机+STM32 MAX7219数码管程序案例)

SPI1_InitStructure.SPI_FirstBit=SPI_FirstBit_MSB; //高位MSB在先
SPI1_InitStructure.SPI_CPOL = SPI_CPOL_High; //选择了串行时钟的稳态,时钟悬空高
*功能:STM32_SPI1硬件配置初始化
*入口参数:无
*出口参数:无
*说明:STM32_SPI1硬件配置初始化,使用3V3
****************************************************************************/
void SPI1_Init(void)
SPI1_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;//数据捕获于第二个时钟沿
SPI1_InitStructure.SPI_NSS = SPI_NSS_Soft;CPolynomial = 7;//CRC值计算的多项式
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_Init(GPIOA,GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7;//SPI1相关引脚
max7219程序

[P_IOB_Data]=r2 //load值0,选中7219
retf
.endp
.public _display8
_display8:.proc
r1=0x08
[P_SIO_Data]=r1 //
call _busy
r1=[_data]
[P_SIO_Data]=r1
void InitIO_7219()
{
*P_IOB_DIR|=SCK_HEX;
*P_IOB_ATTRIB|=SCK_HEX;
*P_IOB_DATA|=SCK_HEX;
*P_IOB_DIR|=SDA_HEX;
*P_IOB_ATTRIB|=SDA_HEX;
*P_IOB_DATA|=SDA_HEX;
r2^=0x0080
[P_IOB_Data]=r2 //load值0,选中7219
retf
.endp
.public _display4
_display4:.proc
r1=0x04
[P_SIO_Data]=r1 //
call busy
r1=[_data]
[P_SIO_Data]=r1
.external _data
.external _bitdata
.ram
.code
.public _intint7219
_intint7219: .proc
r1=0xffff
[P_IOB_Dir]=r1
[P_IOB_Attrib]=r1
r1=0x0000
[P_IOB_Data]=r1
retf
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#define LSB 0x01
//max7219 part
#define DECODE_MODE 0x09
#define INTENSITY 0x0A
#define SCAN_LIMIT 0x0B
#define SHUT_DOWN 0x0C
#define DISPLAY_TEST 0x0F
{
LOAD = LOW;
Write_Max7219_byte(address);
Write_Max7219_byte(dat);
LOAD = HIGH;
}
void Init_Max7219(void) //初始化max7219子函数设置工作寄存器需要查看芯片手册
{
Write_Max7219(SHUT_DOWN,0x01); //Normal Operation XXXXXXX1 Shutdown Mode XXXXXXXX0
Write_Max7219(SCAN_LIMIT,0x07); //SCAN LIMIT 0~7 0xX0~0xX7
Write_Max7219(INTENSITY,0x0f); //Set Intensity 0xX0~0xXf强度调节
}
void main(void)//显示1~8数字
{
unsigned char i;
void delayms(uint z)//延时函数
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y-Fra bibliotek);}
void Write_Max7219_byte(unsigned char temp)//发送一个字节的子程序,上升沿发送数据
{
unsigned char i;
sbit LOAD = P3^5; //MAX7219 Load-Data Input:rising edgepin 12
sbit DIN = P3^6;//MAX7219 Serial-Data Input:rising edgepin 1
sbit CLK = P3^7;//MAX7219 Serial-Clock Input:maximum 10MHzpin 13
i=0;
Init_Max7219();
while(TRUE)
{
Write_Max7219(1,0x83+i);delayms(500);
i++;
}
}
for (i=0; i<8; i++)
{
CLK = LOW;
DIN = (bit)(temp&MSB);
temp <<=1;
CLK = HIGH;
}
}
void Write_Max7219(unsigned char address,unsigned char dat)//向寄存器中写入一个数据先写地址,后写数据load上升沿锁存数据
Write_Max7219(DISPLAY_TEST, 0x00); //Normal Operation XXXXXXX0 Display Test Mode XXXXXXXX1
Write_Max7219(DECODE_MODE,0xff); //Decode Mode Select D7~D0 1 B decode 0 No decode在非BCD译码态输入,高四位为8,9,A,B,C,D,E,F等数显示“.”低四位为正常数码管字型码。
#include <reg51.h>
#define uchar unsigned char
#define uint unsigned int
//common part
#define HIGH 1
#define LOW 0
#define TRUE 1
#define FALSE 0
#define ZERO 0