8结构非线性分析
第8章 非线性系统分析
一、非线性控制系统概述(11)
考虑著名的范德波尔方程
x 2 (1 x2 ) x x 0, 0
该方程描述具有非线性阻尼的非线性二阶系统。当扰动使 x 1 时,因为 (1 x 2 ) 0 系统具有负阻尼,此时系统 x(t ) 的运动呈发散形式;当 x 1 时,因为 从外部获得能量, 2 (1 x 2)>0,系统具有正阻尼,此时系统消耗能量, x(t ) 的运动呈收敛形式;而 当x=1 时,系统为零阻尼, 系统运动呈等幅振荡形式。 上述分析表明,系统能克 服扰动对 的影响,保持幅 值为1的等幅振荡,见右图。
1
第八章 非线性控制系统分析
本章主要内容: 一、非线性控制系统概述 二、常见非线性特性及其对系统运动的影响 三、描述函数法
2
第八章、非线性控制系统分析
本章要求 : 1、了解非线性系统的特点 2、了解常见非线性特性及其对系统运动的影响 3、掌握研究非线性系统描述函数法
3
一、非线性控制系统概述
本节主要内容: 1、研究非线性控制理论的意义 2、非线性系统的特征 3、非线性系统的分析与设计方法
5
一、非线性控制系统概述(2)
6
一、非线性控制系统概述(3)
在下图所示的柱形液位系统中,设 H为液位高度,Qi 为 C 为贮槽的截面积。根据水力 液体流入量, Q0为液体流出量, 学原理知
Q0 k H
其中比例系数 k 取决于液体的粘度的阀阻。 液体系统的动态方程为
dH C Qi Q 0 Qi k H dt
显然,液位和液体输入量的数字关系式为非线性微分方程。 由此可见,实际系统中普遍存在非线性因素。
7
一、非线性控制系统概述(4)
自动控制原理-第8章非线性控制系统
8非线性控制系统前面几章讨论的均为线性系统的分析和设计方法,然而,对于非线性程度比较严重的系统,不满足小偏差线性化的条件,则只有用非线性系统理论进行分析。
本章主要讨论本质非线性系统,研究其基本特性和一般分析方法。
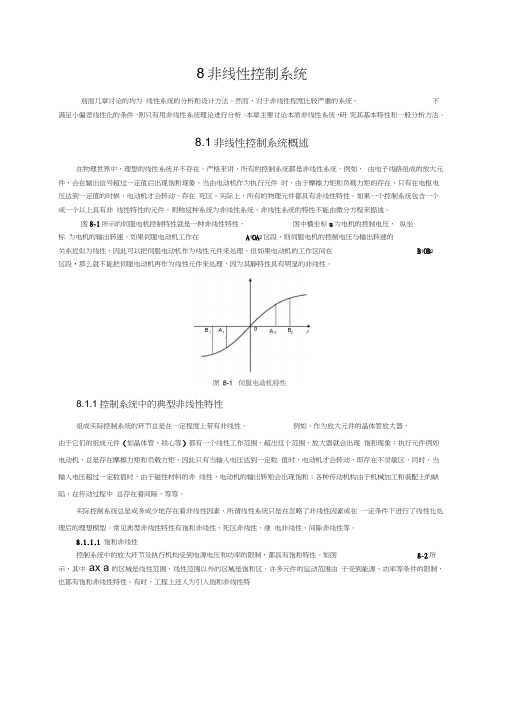
8.1非线性控制系统概述在物理世界中,理想的线性系统并不存在。
严格来讲,所有的控制系统都是非线性系统。
例如,由电子线路组成的放大元件,会在输出信号超过一定值后出现饱和现象。
当由电动机作为执行元件时,由于摩擦力矩和负载力矩的存在,只有在电枢电压达到一定值的时候,电动机才会转动,存在死区。
实际上,所有的物理元件都具有非线性特性。
如果一个控制系统包含一个或一个以上具有非线性特性的元件,则称这种系统为非线性系统,非线性系统的特性不能由微分方程来描述。
图8-1所示的伺服电机控制特性就是一种非线性特性,图中横坐标u为电机的控制电压,纵坐标为电机的输出转速,如果伺服电动机工作在A1OA2区段,则伺服电机的控制电压与输出转速的关系近似为线性,因此可以把伺服电动机作为线性元件来处理。
但如果电动机的工作区间在B1OB2区段•那么就不能把伺服电动机再作为线性元件来处理,因为其静特性具有明显的非线性。
8.1.1控制系统中的典型非线性特性组成实际控制系统的环节总是在一定程度上带有非线性。
例如,作为放大元件的晶体管放大器,由于它们的组成元件(如晶体管、铁心等)都有一个线性工作范围,超出这个范围,放大器就会出现饱和现象;执行元件例如电动机,总是存在摩擦力矩和负载力矩,因此只有当输入电压达到一定数值时,电动机才会转动,即存在不灵敏区,同时,当输入电压超过一定数值时,由于磁性材料的非线性,电动机的输出转矩会出现饱和;各种传动机构由于机械加工和装配上的缺陷,在传动过程中总存在着间隙,等等。
实际控制系统总是或多或少地存在着非线性因素,所谓线性系统只是在忽略了非线性因素或在一定条件下进行了线性化处理后的理想模型。
常见典型非线性特性有饱和非线性、死区非线性、继电非线性、间隙非线性等。
自动控制原理第八章非线性控制系统分析
第八章非线性控制系统分析l、基本内容和要求(l)非线性系统的基本概念非线性系统的定义。
本质非线性和非本质非线性。
典型非线性特性。
非线性系统的特点。
两种分析非线性系统的方法——描述函数法和相平面法。
(2)谐波线性化与描述函数描述函数法是在一定条件下用频率特性分析非线性系统的一种近似方法。
谐波线性化的概念。
描述函数定义和求取方法。
描述函数法的适用条件。
(3)典型非线性特性的描述函数(4)用描述函数分析非线性系统非线性系统的一般结构。
借用奈氏判据的概念建立在奈氏图上判别非线性反馈系统稳定性的方法,非线性稳定的概念,稳定判据。
(5)相平面法的基本概念非线性系统的数学模型。
相平面法的概念和内容。
相轨迹的定义。
(6)绘制相轨迹的方法解析法求取相轨迹;作图法求取相轨迹。
(7)从相轨迹求取系统暂态响应相轨迹与暂态响应的关系,相轨迹上各点相应的时间求取方法。
(8)非线性系统的相平面分析以二阶系统为例说明相轨迹与系统性能间的关系,奇点和极限环的定义,它们与系统稳定性及响应的关系。
用相平面法分析非线性系统,非线性系统相轨迹的组成。
改变非线性特性的参量及线性部分的参量对系统稳定性的影响。
2、重点(l)非线性系统的特点(2)用描述函数和相轨迹分析非线性的性能,特别注重于非线性特性或线性部分对系统性能的影响。
8-1非线性控制系统分析1研究非线性控制理论的意义实际系统都具有程度不同的非线性特性,绝大多数系统在工作点附近,小范围工作时,都能作线性化处理。
应用线性系统控制理论,能够方便地分析和设计线性控制系统。
如果工作范围较大,或在工作点处不能线性化,系统为非线性系统。
线性系统控制理论不能很好地分析非线性系统。
因非线性特性千差万别,无统一普遍使用的处理方法。
非线性元件(环节):元件的输入输出不满足(比例+叠加)线性关系,而且在工作范围内不能作线性化处理(本质非线性)。
非线性系统:含有非线性环节的系统。
非线性系统的组成:本章讨论的非线性系统是,在控制回路中能够分为线性部分和非线性部分两部分串联的系统。
自动控制原理第8章_非线性控制系统分析

B1 1 3 2 N ( A) A A 2 16
8.2.3 典型非线性特性得描述函数
1.饱和特性的描述函数
X(t) X(t)
kA sin t 0 ω t 1 x(t ) ka b ω t 1 2
X(t)是单值奇函数,所以A1=0
非线性环节的描述函数总是输入信号幅值A的函数, 一般也是频率的函数,因此,描述函数一般记为
N ( A, j )
非线性元件的描述函数或等效幅相频率特性与输入 的正弦振荡的振幅A有关,这是非线性特性本质的反 映。它与线性环节的情况正好相反,线性环节的幅 相特性(频率特性)与正弦输入的幅值无关。
8.2.2描述函数
4 B1 [ kA sint sinω td (ω t ) ka sinω td (ω t )] π
1
e(t)
0
4kA 4ka sin2 d π π
1
2
1
0
4kA 1 1 4ka ( sin 2 1 ) cos 1 2 4
2k a a a A[arcsin( ) 1 ( )2 ] A A A
8.1.4
继电器特性
8.1.4
继电器特性
(t ) 0 m a e(t ) a, e 0 , 0 , (t ) 0 a e ( t ) m a , e x(t ) bsign[e(t )], e(t ) a b , e(t ) m a, e (t ) 0 (t ) 0 b , e(t ) m a, e
(6)气动或液压滑阀的搭接段。 放大器的输出饱和或输出限幅
8.1.3
第8章 非线性系统分析

不稳定节点
x 2 n x n x 0
2
1 0
相轨迹振荡远离原点,为不 稳定焦点。
dx/dt x
不稳定焦点
x 2 n x n x 0
2
0
相轨迹为同心圆,该奇点为中心 点。
dx/dt x
中心点
x 2 n x n x 0
R(s) 例8-7 继电控制系统, + 阶跃信号作用下,试用 相平面法分析系统运动。
e
+M -M
m
C(s) K s(Ts 1)
解 (1)作相平面图 线性部分 T c c Km 误差方程 e(t ) r (t ) c(t ) ———— 阶跃信号 r (t ) 1(t ), r (t ) 0, r(t ) 0 误差方程 T e e Km
x x sin x 0
奇点为
f ( x, x) x sin x 0
x0 无穷多个。 x k
4、奇点邻域的运动性质
由于在奇点上,相轨迹的斜率不定, 所以可以引出无穷条相轨迹。
dx 0 dx 0
相轨迹在奇点邻域的运动可以分为
1.趋向于奇点 2.远离奇点 3.包围奇点
(4)滞环特性
滞环特性为正向行程与反向行程不重叠,输入输出曲 线出现闭合环路。又称换向不灵敏特性。通常是叠加 在其它传输关系上的附加特性。
f(e) k +M -e +e0 e -e0 0 +e -M f(e) +M -e 0 -M +e e 0 f(e) e
饱和滞环
继电滞环
自动控制原理-第8章 非线性控制系统教案

8 非线性控制系统前面几章讨论的均为线性系统的分析和设计方法,然而,对于非线性程度比较严重的系统,不满足小偏差线性化的条件,则只有用非线性系统理论进行分析。
本章主要讨论本质非线性系统,研究其基本特性和一般分析方法。
8.1非线性控制系统概述在物理世界中,理想的线性系统并不存在。
严格来讲,所有的控制系统都是非线性系统。
例如,由电子线路组成的放大元件,会在输出信号超过一定值后出现饱和现象。
当由电动机作为执行元件时,由于摩擦力矩和负载力矩的存在,只有在电枢电压达到一定值的时候,电动机才会转动,存在死区。
实际上,所有的物理元件都具有非线性特性。
如果一个控制系统包含一个或一个以上具有非线性特性的元件,则称这种系统为非线性系统,非线性系统的特性不能由微分方程来描述。
图8-1所示的伺服电机控制特性就是一种非线性特性,图中横坐标u 为电机的控制电压,纵坐标ω为电机的输出转速,如果伺服电动机工作在A 1OA 2区段,则伺服电机的控制电压与输出转速的关系近似为线性,因此可以把伺服电动机作为线性元件来处理。
但如果电动机的工作区间在B 1OB 2区段.那么就不能把伺服电动机再作为线性元件来处理,因为其静特性具有明显的非线性。
图8-1 伺服电动机特性8.1.1控制系统中的典型非线性特性组成实际控制系统的环节总是在一定程度上带有非线性。
例如,作为放大元件的晶体管放大器,由于它们的组成元件(如晶体管、铁心等)都有一个线性工作范围,超出这个范围,放大器就会出现饱和现象;执行元件例如电动机,总是存在摩擦力矩和负载力矩,因此只有当输入电压达到一定数值时,电动机才会转动,即存在不灵敏区,同时,当输入电压超过一定数值时,由于磁性材料的非线性,电动机的输出转矩会出现饱和;各种传动机构由于机械加工和装配上的缺陷,在传动过程中总存在着间隙,等等。
实际控制系统总是或多或少地存在着非线性因素,所谓线性系统只是在忽略了非线性因素或在一定条件下进行了线性化处理后的理想模型。
建筑结构非线性时程分析
建筑结构非线性时程分析摘要:非线性时程分析是目前模拟建筑结构罕遇地震性能最准确、最完善的方法,受理论水平和硬件条件所限,早期的非线性时程分析多采用了过多的简化,有悖于准确模拟的初衷。
在对当前国内外非线性时程分析技术研究前沿了解的基础上,对该技术最新进展进行介绍,并重点介绍非线性骨架曲线、剪力墙模拟、软件应用、计算收敛加速问题的最新应用情况。
关键词:非线性时程分析;构件骨架曲线;剪力墙abstract: nonlinear time-history analysis method is currently building structures under earthquake performance the most accurate, the most perfect, limited to the theoretical level and the hardware conditions, process analysis of early nonlinear multiple eases the excessive use, with the accurate simulation of the original. based on the nonlinear time-history analysis research in frontier technology on the knowledge, the introduction of the new progress of the technology, and introduces the latest application of nonlinear skeleton curves, shear wall model, software applications, convergence acceleration problem. keywords: nonlinear time-history analysis; component skeleton curve; shear wall中图分类号: f045.33文献标识码:a 文章编号:2095-2104(2013)0前言现代结构设计的发展对结构分析提出了更高的要求,随着计算技术的提高,更加精确的模拟真实结构成为越来越迫切的课题和要求。
131209第8章非线性控制系统分析

非线性系统的数学模型是非线性微分方程;但至今为止 非线性微分方程没有成熟的解法;
8.2 几种典型的非线性特性
饱和特性 死区特性 间隙特性 继电器特性 变增益特性
(1)饱和特性(如运算放大器,学习效率等)
1. 对系统而言,饱和特性往往促使系统稳 定,但会减小放大系数,从而导致稳定 精度降低。 2. 饱和特性的例子是放大器,许多执行元 件也具有饱和特性。例如伺服电机。 3. 实际上,执行元件一般兼有死区和饱和 特性。
y1 ( t )
4M
sin t
理想继电特性的描述函数:
4M N ( A) 0 A
一般继电特性的描述函数:
2M mh 2 h 2 2M h N ( A) 1 ( ) 1 ( ) j ( m 1) 2 A A A A ( A h)
可能不稳定—发散、衰减等
3. 自振运动— 非线性系统特有的运动形式,产生自持振荡 4. 发生频率畸变—频率响应的复杂性 — 跳频响应,倍/分频 响应,组合振荡
非线性控制系统的分析方法
小扰动线性化
非线性系统研究方法 仿真方法
全数字仿真 半实物仿真 相平面法 描述函数法 波波夫法 反馈线性化法 微分几何方法
h 0 理想继电特性: m 1 死区继电特性: m 1 纯滞环继电特性:
4M N ( A) A
4M h N ( A) 1 A A
2
2
4M 4 Mh h N ( A) 1 j A A2 A
一般而言,描述函数 N(A)是A的函数,与频率无关 非线性环节为单/非单值函数时,N(A)是实/复数,虚部为/不为0
在小误差信号时具有较小的增益,从而提高系统的相对稳定性。 同时抑制高频低振幅噪声,提高系统响应控制信号的准确度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8.2 非线性问题基本解决思路
? 材料非线性:分段线性化,方程形式不变,将材料本构 关系线性化,分段求解,将线性问题的方程推广用于非 线性问题。
? 几何非线性:常用增量分析法,建立变化位的平衡方程。 有两种表达格式:(1)在整个分析过程中参考位保持 不变,始终取初始位,称为完全Lagrange格式;(2)在 整个分析过程中参考位不断被更新,参考前面每一步荷 载步开始的位形,称为修正Lagrange格式 。
可改写为:
?? 0?? f (???) ? [D]{?} ? {? } ? {? }e
?? 0?? {? } ? {? }e ? f (???) ? [ D]{?}
?改写平衡方程
?V ?B?T ([D]{?}? ?? 0?)dV ? {F} (?V ?B?T ([D][ B]dV){?}? ?V ?B?T?? 0?)dV ? {F}
[KT ]0{?} ? {F}? {F}
式中:[K T]0为结构的起始切线刚度矩阵, {F} 为与初应力等价的节点荷载
? [ KT ]0 ? V [ B]T [ D][ B]dV
? {F} ?
?
[ B]T {?
V
0}dV
迭代过程
{? }1
?
[
KT
]
? 0
1{F
}
?弹性解
{?}1 ? [ B]{? }1
[
[
[
)][
B]dV
?P-δ凸时收敛,凹 时可能发散。
2、切线刚度 (N-R法)
任何具有一阶导数的连续函数 Ψ(x),在xn点的 一阶Taylor展开:
?
(x)
?
?
( xn ) ?
?? ?
d? dx
?? ( x ?n
?
xn )
非线性方程 Ψ(x)=0 在xn附近的近似方程是线性方程
?
(xn ) ?
第八章 非线性问题
8.1 非线性问题
?材料非线性: 材料本构关系非线性引起。可分为 两类:(1)非线性弹性问题(橡皮、塑料、土壤 等),过程可逆;( 2)非线性弹塑性问题:材料 屈服以后表现,过程不可逆。二者加载同,卸载不 同。
?几何非线性 :大位移、大转动引起。(板壳结构 大挠度问题,锻压成型)大位移小应变问题 材料线 性;大位移大应变问题 材料非线性 ,双重非线性 。
? 求解方法:割线刚度法(直接迭代法)、切线刚度法 (N-R法) 、初应力法(mN-R法)和增量法。
8.3 非线性求解方法
1、割线刚度法(直接迭代)
结构整体平衡方程: ?? ?? ?K (? )??? ?? ?R?? 0
(1)假定初始近似解: 可令:?? ?0 ? 0
(2)由本构关系求出 ?K (? 0 )?? ?K ?0
硬化规律
判断何时屈服 Tresca, Mises
屈服后塑性应变 增量的方向,即 各分量的比值: 普朗特 -路斯
给定应力增量引 起的塑性应变增 量大小:等向、 随动、混合
1、屈服条件:米赛斯(Von Mises)
?Mises在Tresca 屈服条件(最大剪应力条件)基 础上,提出 材料在复杂应力状态下的 等效应力达 到单向拉伸的屈服极限 时,材料开始屈服。于是, 米赛斯屈服条件可写成 :
{? 0}1 ? f ({?}1) ? [ D]{?}1
? {F}1 ?
[
V
B]T {?
0}1 dV
? {? }1 ? [ K0 ]?1{F}1
{? }2 ? {? }1 ? ? {? }1
?修正N-R方法(mN-R,等刚度法),
? 每次迭代不改变它的刚度值始终取初始刚度,计算 量小,但收敛慢些。
4、荷载增量法
?荷载增量法 :把荷 载分成很多小的荷 载步,在每一个荷 载步上使用一次或 都多次 N-R方法。 实质上是分段线性 化。
[KT ]n{? ? }n?1 ? {? R}n
?n?1 ? ?n ? ? ?n?1
8.4 弹塑性本构关系
8.4.1 材料弹塑性行为 ?弹塑性:卸载后存 在不可恢复的残余变 形。它与非线性弹性 材料有显著区别:加 载同,卸载不同。
(3)由平衡方程求得下一步近似解:
?? ?1 ? ?K ?0?1?R?
?初始线 弹性解
(4 )重复( 2)和( 3),直到两次结果非常接近。
?K ?n ? ?K (? n )? ?? ?n?1 ? ?K ?n?1?R?
R
{?} ? [ B]{? }
{? } ? [ D(? )]{?}
K ] ? ? B] D(? T
d?
d?
?? ? ?n?1
?n
?
??
(?n )
?? ?
d?
d?
?? ? ?
KT
?KT ?n ? ?n?1 ? ? ? (?n )
?n?1 ? ?n ? ? ?n?1
每次迭代需要修改 K。
迭代过程 假设?? ?0 ? 0
{?} ? [ B]{? } {?}0
d?? ?? ?DT (???)?d??? [DT ]0
?KT ?? ?V ?B?T ?DT (? )?B??dV [ KT ]0
? ?? ?0
?
? ?K T
? ?? ?1
0
?0
?? ?1 ? ?? ?0 ? ? ?? ?0
3、初应力法(mN-R法)
材料本构关系可表示
?? ?? f (???)
设想用具有初应力的线弹性物理方程代替 上式:
?? ?? ?? ?e ? ?? 0?? ?D????? ?? 0?
?? ?
d? dx
?? ( ?1
?
??
(
xn
)
/?? ?
d? dx
? ? ?n
xn?1 ? xn ? ? xn?1
Newton-Raphson 迭代公式
? 针对结构平衡方程: Ψ(δ)=[K]{δ} -{R}={F (δ) } -{R}= 0
利用N-R公式,有:
?? ?
? ??s
式中等效应力为
1
?
?
? ? ?
1 2
[??
1
?
?
?2
2
?
??
2
?
?
?2
3
?
??
3
?
?
1
?2
]?? ?
2
?几何上以σ1 =σ2=σ3为轴线的圆柱面。
? 或用一般应力表示
1
? ? ?? ? ? ? ?
2 ?? ? x ? ? y 2 ? ? y ? ? z 2 ? ?? z ? ? x ?2 ?? 2
算例
?E,A,L,σ s
?杆I弹塑性,杆 II弹性。
?求3σ sA作用下2点位移。
?硬化:屈服后应力随应变继续增加;卸载后再加载 屈服应力提高,一般等于卸载时的应力。
?循环塑性特征
?循环塑性 一般表现
?循环硬松弛
?循环硬化
?循环蠕变
8.4.2 弹塑性模型基本法则
弹塑性模型三法则
屈服条件 流动法则