ANSYS单元特性之命令流算例
ANSYS命令流教程
引用ANSYS 入门教程(26) - 网格划分高级技术(b)四、单元有效性检查不良的单元形状会导致不准确的结果,然而并没有判别单元形状好坏的通用标准,也就是说一种单元形状对一个分析可能导致不准确的结果,但可能对另一种分析的结果又是可接受的。
在计算过程中,ANSYS可能不出现单元形状警告信息,也可能会出现很多个单元形状警告信息,这都不能说明单元形状就一定会导致准确或不准确的结果,因此单元形状的好坏和结果的准确性完全依赖用户的判断和分析。
1. 单元形状参数限值设置命令:SHPP, Lab, VALUE1, VALUE2ANSYS 单元形状检查是缺省的,但控制单元形状检查的参数可以修改。
⑴Lab = ON:激活单元形状检查。
VALUE1 可取:ANGD:SHELL28 单元角度检查。
ASPECT:单元纵横比检查。
如四边形单元警告限值为20,错误限值为1E6;PARAL:对边平行度检查。
如无中间节点的四边形该项的警告限值为70°,如超过150°则给出错误信息。
MAXANG:最大角度检查。
无中间节点的四边形单元该项警告限值为155°,而其错误限值为179.9°;JACRAT:雅可比率检查。
简单地说,雅可比率表达了“单元”模拟“实际”的计算可靠性,比率越高越不可靠。
如h 单元的警告限值为30,超过30 单元形状就很不理想(与母单元形状相差甚远)。
WARP:歪曲率检查。
对于四边形面单元、壳单元或体单元的面等,当其严重歪曲时造成不好的单元形状,此值越高表示单元歪曲越严重。
也可用ALL 关闭或激活所有选项。
⑵Lab = WARN:仅激活警告模式,对超过错误限制的单元只给出警告信息而不致网格划分失败。
而Lab=ON 则一旦超过错误限制时将导致网格划分失败。
⑶Lab = OFF:完全关闭单元形状检查,可通过设置VALUE1 的值而关闭个别形状检查。
如VALUE1 可取ANGD、ASPECT、PARAL、MAXANG、JACRAT、WARP 及ALL 等。
ANSYS命令流
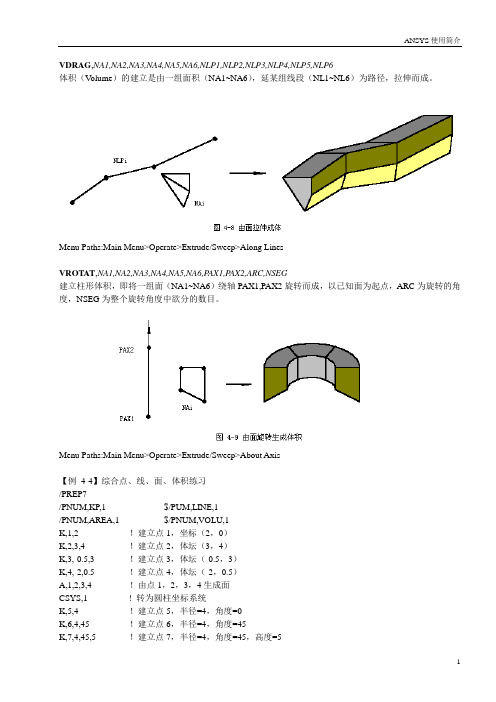
VDRAG,NA1,NA2,NA3,NA4,NA5,NA6,NLP1,NLP2,NLP3,NLP4,NLP5,NLP6体积(V olume)的建立是由一组面积(NA1~NA6),延某组线段(NL1~NL6)为路径,拉伸而成。
Menu Paths:Main Menu>Operate>Extrude/Sweep>Along LinesVROTAT,NA1,NA2,NA3,NA4,NA5,NA6,P AX1,P AX2,ARC,NSEG建立柱形体积,即将一组面(NA1~NA6)绕轴PAX1,PAX2旋转而成,以已知面为起点,ARC为旋转的角度,NSEG为整个旋转角度中欲分的数目。
Menu Paths:Main Menu>Operate>Extrude/Sweep>About Axis【例4-4】综合点、线、面、体积练习/PREP7/PNUM,KP,1 $/PUM,LINE,1/PNUM,AREA,1 $/PNUM,VOLU,1K,1,2 !建立点1,坐标(2,0)K,2,3,4 !建立点2,体坛(3,4)K,3,-0.5,3 !建立点3,体坛(-0.5,3)K,4,-2,0.5 !建立点4,体坛(-2,0.5)A,1,2,3,4 !由点1,2,3,4生成面CSYS,1 ! 转为圆柱坐标系统K,5,4 !建立点5,半径=4,角度=0K,6,4,45 !建立点6,半径=4,角度=45K,7,4,45,5 !建立点7,半径=4,角度=45,高度=5K,8,4,,5 !建立点7,半径=4,角度=0,高度=5A,5,6,7,8 !生成一个中心角为45度的圆柱面ADEL,1 !删除面1LDEL,3 !删除线1A,1,2,3,4 !生成面ADEL,2A,5,6,8A,8,5,6CSYS !转到卡式坐标K,,7,1,3/PNUM,KP,1V,8,5,6,94.8 用体素创建ANSYS对象这里先引入体素(Primitive)的概念,ANSYS中,体素指预先定义好的具有共同形状的面或体。
(完整版)ansys命令流.doc
八天学会 Ansys 命令流为方便大家的交流和学习, 特推出 " 跟我学命令流 " 课程本课程分为三部分: 前处理 , 加载求解 , 后处理每部分的学习时间:10 天 , 共计 30 天每天学习大约10 个命令希望本课程对大家能有所帮助第一天目标 : 熟悉 ANSYS基本关键字的含义k --> Keypoints 关键点l --> Lines 线a --> Area 面v --> Volumes 体e --> Elements 单元n --> Nodes 节点cm --> component 组元et --> element type 单元类型mp --> material property 材料属性r --> real constant 实常数d --> DOF constraint约束f --> Force Load 集中力sf --> Surface load on nodes 表面载荷bf --> Body Force on Nodes 体载荷ic --> Initial Conditions 初始条件第二天目标 : 了解命令流的整体结构, 掌握每个模块的标识!文件说明段/BATCH/TITILE,test analysis !定义工作标题/FILENAME,test !定义工作文件名/PREP7 ! 进入前处理模块标识!定义单元 , 材料属性 , 实常数段ET,1,SHELL63 ! 指定单元类型ET,2,SOLID45 !指定体单元MP,EX,1,2E8 !指定弹性模量MP,PRXY,1,0.3 !入泊松比MP,DENS,1,7.8E3 ! 入材料密度R,1,0.001 !指定壳元常数- 厚度......!建立模型K,1,0,0,, !定关点K,2,50,0,,K,3,50,10,,K,4,10,10,,K,5,10,50,,K,6,0,50,,A,1,2,3,4,5,6, !由关点生成面......!划分网格ESIZE,1,0,AMESH,1......FINISH ! 前理束/SOLU ! 入求解模!施加束和荷DL,5,,ALLSFL,3,PRES,1000SFL,2,PRES,1000......SOLVE !求解FINISH ! 求解模束/POST1 ! 入通用后理器....../POST26 ! 入程后理器⋯⋯/EXIT,SAVE ! 退出并存以下是日志文件中常出的一些命令的明, 希望能大家在整理LOG文件有所帮助/ANGLE ! 指定绕轴旋转视图/DIST !说明对视图进行缩放/DEVICE ! 设置图例的显示, 如: 风格 , 字体等/REPLOT ! 重新显示当前图例/RESET ! 恢复缺省的图形设置/VIEW ! 设置观察方向/ZOOM !对图形显示窗口的某一区域进行缩放第三天生成关键点和线部分1.生成关键点K, 关键点编号 ,X 坐标 ,Y 坐标 ,Z 坐标例:K,1,0,0,02.在激活坐标系生成直线LSTR,关键点 P1, 关键点 P2例LSTR,1,23.在两个关键点之间连线L, 关键点 P1, 关键点 P2例L,1,2注: 此命令会随当前的激活坐标系不同而生成直线或弧线4.由三个关键点生成弧线LARC,关键点 P1, 关键点 P2, 关键点 PC,半径 RAD例LARC,1,3,2,0.05注: 关键点 PC是用来控制弧线的凹向5.通过圆心半径生成圆弧CIRCLE,关键点圆心 , 半径 RAD,,,, 圆弧段数NSEG例:CIRCLE,1,0.05,,,,46.通过关键点生成样条线BSPLIN,关键点 P1, 关键点 P2,关键点 P3, 关键点 P4, 关键点 P5, 关键点 P6 例:BSPLIN,1,2,3,4,5,67.生成倒角线LFILLT, 线 NL1, 线 NL2,倒角半径RAD例LFILLT,1,2,0.0058.通过关键点生成面A, 关键点 P1, 关键点 P2, 关键点 P3, 关键点 P4, 关键点 P5, 关键点 P6,P7,P8...例:A,1,2,3,49.通过线生成面AL, 线 L1, 线 L2, 线 L3, 线 L4, 线 L5, 线 L6, 线 L7, 线 L8, 线 L9, 线 L10例:AL,5,6,7,810.通过线的滑移生成面ASKIN, 线 NL1,线 NL2,线 NL3,线 NL4, 线 NL5, 线 NL6, 线 NL7,线 NL8, 线 NL9例:ASKIN,1,4,5,6,7,8注:线 1 为滑移的导向线第四天目标 : 掌握常用的实体 - 面的生成生成矩形面1.通过矩形角上定位点生成面BLC4,定位点 X 方向坐标 XCORNER,定位点 Y 方向坐标 YCORNER,矩形宽度 WIDTH,矩形高度HEIGHT,矩形深度 DEPTH例:BLC4,0,0,5,3,02.通过矩形中心定位点生成面BLC5,定位点 X 方向坐标 XCENTER,定位点 Y 方向坐标 YCENTER,矩形宽度 WIDTH,矩形高度HEIGHT,矩形深度 DEPTH注:与上条命令的不同就在于矩形的定位点不一样例:BLC5,2.5,1.5,5,3,03. 通过在工作平面定义矩形X.Y 坐标生成面RECTNG,矩形左边界 X 坐标 X1,矩形右边界X 坐标 X2, 矩形下边界Y坐标 Y1, 矩形上边界Y 坐标Y2例:RECTNG,0,5,0,3生成圆面4.通过中心定位点生成实心圆面CYL4,定位点 X 方向坐标 XCENTER,定位点 Y 方向坐标 YCENTER,圆面的内半径 RAD1,内圆面旋转角度 THETA1,圆面的外半径 RAD2,外圆面旋转角度THETA2,圆面的深度 DEPTH注:如要实心的圆面则不用 RAD2,THETA2,DEPTH例:CYL4,0,0,5,3605.生成扇形圆面命令介绍如上例 1 实心扇形 :CYL4,0,0,5,60例2 扇形圆环 :CYL4,0,0,5,60,10,60例3 整的圆环 :CYL4,0,0,5,360,10,360注: 同时可通过定义圆面的深度以生成柱体6.通过在工作平面定义起始点生成圆面CYL5,开始点 X坐标 XEDGE1,开始点 Y坐标 YEDGE1,结束点 X坐标 XEDGE2,结束点 Y坐标YEDGE2, 圆面深度 DEPTH例:CYL5,0,0,2,2,7.通过在工作平面定义内外半径和起始角度来生成圆面PCIRC,内半径 RAD1,外半径 RAD2,起始角度THETA1,结束角度THETA2例LCIRC,2,5,30,1808.生成面与面的倒角AFILLT, 面 1 的编号 NA1, 面 2 的编号 NA2,倒角半径RAD例:AFILLT,2,5,2下一讲 : 多边形面的生成第五天目标 : 掌握多边形面和体的生成1.生成多边形面命令 :RPR4, 多边形的边数NSIDES,中心定位点X 坐标 XCENTER,中心定位点Y 坐标 YCENTER, 中心定位点距各边顶点的距离RADIUS,多边形旋转角度THETA例:RPR4,4,0,0,0.15,30注: 这条命令可通过定义不同的NSIDES生成三边形 , 四边形 ,...,八边形2.生成多边形体命令 :RPR4, 多边形的边数NSIDES,中心定位点X 坐标 XCENTER,中心定位点Y 坐标 YCENTER, 中心定位点距各边顶点的距离RADIUS,多边形旋转角度THETA,多边形的深度DEPTH例:RPR4,4,0,0,0.15,30,0.1注: 多边形体和面命令唯一的不同就在于深度DEPTH的定义到此 , 关键点 , 线 , 面的生成讲解已结束, 下一讲 : 体的生成第六天目标 : 掌握体的生成命令1.通过关键点生成体命令 :V, 关键点 P1, 关键点 P2, P3, P4, P5, P6, P7, P8例:V,4,5,6,7,15,24,252.通过面生成体命令 :VA, 面 A1, 面 A2, A3, A4, A5, A6, A7, A8, A9, A10例:VA,3,4,5,8,103.通过长方形角上定位点生成体命令 :BLC4该命令前面在讲生成面的时候已作介绍, 唯一的不同在于深度DEPTH的定义 .4.通过长方形中心定位点生成面命令 :BLC55.通过定义长方体起始位置生成体命令 :BLOCK,开始点 X 坐标 X1,结束点 X 坐标 X2, Y1, Y2, Z1, Z2例:BLOCK,2,5,0,2,1,36.生成圆柱体基本命令通生成圆形面, 不同在于DEPTH的定义基本命令 :CYL4基本命令 :CYL5基本命令 :CYLIND7.生成棱柱基本命令通生成多边形, 不同在于DEPTH的定义基本命令 :RPR48.通过球心半径生成球体命令 :SPH4, 球心 X 坐标 XCENTER,球心 Y 坐标 YCENTER,半径 RAD1,半径 RAD2例:SPH4,1,1,2,59.通过直径上起始点坐标生成球体命令 :SPH5, 起点 X 坐标 XEDGE1,起点 Y坐标 YEDGE1,结束点 X 坐标 XEDGE2,结束点 Y 坐标YEDGE2例:SPH5,2,5,7,610.在工作平面起点通过半径和转动角度生成球体命令 :SPHERE,半径 RAD1,半径 RAD2,转动角度THETA1,转动角度THETA2例:SPHERE,2,5,0,6011.生成圆锥体命令 :CONE,底面半径 RBOT,顶面半径 RTOP,底面高 Z1, 顶面高 Z2, 转动角度 THETA1,转动角度THETA2例:CONE,10,20,0,50,0,180下一讲 : 布尔操作第七天目标 : 掌握常用的布尔操作命令1.沿法向延伸面生成体命令 :VOFFST,面的编号NAREA,面拉伸的长度DIST, 关键点增量KINC例:VOFFST,1,2,,2.通过坐标的增量延伸面生成体命令 :VEXT, 面 1 的编号 NA1,面 2 的编号 NA2,增量 NINC,X 方向的增量 DX,Y 方向的增量 DY,Z 方向的增量 DZ, RX, RY, RZ例:VEXT,1,5,1,1,2,2,3. 面绕轴旋转生成体命令 :VROTAT,面 1 的编号PAX1,定位轴关键点 2 编号NA1,面 2 的编号PAX2,旋转角度NA2,NA3, NA4, NA5, NA6,ARC,生成体的段数 NSEG定位轴关键点 1 编号例:VROTAT,1,2,,,,,4,5,360,44. 沿线延伸面生成体命令 :VDRAG,面 1 的编号 NA1,面 2 的编号 NA2, NA3, NA4, NA5, NA6,导引线 2 的编号 NLP2, NLP3, NLP4, NLP5, NLP6例:VDRAG,2,3,,,,,8,导引线 1 的编号NLP1, 5. 线绕轴旋转生成面命令 :AROTAT,线 1 的编号 NL1, NL2, NL3, NL4, NL5, NL6, 位轴关键点 2 的编号 PAX2,旋转角度ARC,生成面的段数例:AROTAT,3,4,,,,,6,8,360,4定位轴关键点NSEG1 的编号PAX1,定6.沿线延伸线生成面命令 :ADRAG,线 1 的编号 NL1,NL2, NL3, NL4, NL5, NL6, 导引线 1 的编号 NLP1, NLP2, NLP3, NLP4, NLP5, NLP6例:ADRAG,3,,,,,,87.同理可以延伸关键点 , 相应的命令如下 :LROTAT, NK1, NK2, NK3, NK4, NK5, NK6, PAX1, PAX2, ARC, NSEGLDRAG, NK1, NK2, NK3, NK4, NK5, NK6, NL1, NL2, NL3, NL4, NL5, NL6各选项的含义雷同于上 .8.延伸一条线命令 LEXTND,线的编号 NL1, 定位关键点编号 NK1,延伸的距离 DIST, 原有线是否保留控制项KEEP例LEXTND,5,2,1.5,09.布尔操作 : 加命令 LCOMB,线编号 NL1,线编号 NL2, 是否修改控制项KEEP例LCOMB,2,5注: 对面和体的相应为:VADD,AADD.选项的含义都类似10.布尔操作 : 粘接和搭接搭接的核心关键字为:OVLAP,随实体的不同略有不同, 如 :对体为 VOVLAP对面为 AOVLAP对线为 LOVLAP粘接的核心关键字为:GLUE, 随实体的不同略有不同, 如 :对体为 VGLUE对面为 AGLUE对线为 LGLUE但其他的选项的含义是类似的, 这里就不再累述.下一讲 : 移动 , 复制 , 映射 , 删除 ...第八天目标 : 掌握体素的移动, 复制 , 删除 , 映射一. 移动关键点命令 :KMODIF,关键点编号NPT,移动后的坐标X, 移动后的坐标Y, 移动后的坐标Z例:KMODIF,5,0,0,2二. 移动复制关键点命令 :KGEN,复制次数选项 ITIME, 起始关键点编号 NP1,结束关键点编号 NP2,增量 NINC,偏移DX,偏移 DY,偏移 DZ,关键点编号增量 KINC, 生成节点单元控制项 NOELEM,原关键点是否被修改选项 IMOVE例:KGEN,2,1,10,1,2,2,2,,,,注:IMOVE 选项说明 , 设置为 0 时, 不修改原关键点 , 即为复制 , 设置为 1 时 , 修改原关键点 , 即为移动 , 从而通过控制 IMOVE选项实现移动或复制 .三. 移动复制线命LGEN,ITIME,NL1,NL2,NINC,DX,DY,DZ,KINC,NOELEM,IMOVE各选项的含义同上四. 移动复制面命:AGEN,ITIME,NA1,NA2,NINC,DX,DY,DZ,KINC,NOELEM,IMOVE各选项的含义同上五. 移动复制体命令 :VGEN,ITIME,NV1,NV2,NINC,DX,DY,DZ,KINC,NOELEM,IMOVE各选项的含义同上六. 修改面的法向方向命令 :ANORM,面的编号 ANUM,单元的法向方向是否修改选项NOEFLIP例:ANORM,2七.体素的删除基本的命令为 :*DELE组合不同的关键字形成不同的命令如:KDELE,LDELE,ADELE,VDELE基本的命令格式为 :*DELE, 起始体素编号 N*1, 结束体素编号 N*2, 增量 NINC,是否删除体素下层的元素选项 KSWP如LDELE,2,5,1,1八.体素的映射基本的命令为 :*SYMM组合不同的关键字形成不同的命令如:KSYMM,LSYMM,ARSYM,VSYMM基本的命令格式为 :*SYMM,映射轴选项 NCOMP,起始体素编号 N*1, 结束体素编号 N*2, 增量NINC,关键点编号增量 KINC,NOELEM, IMOVE如:VSYMM,X,1,10,1,,,,。
ansys命令流使用方法

ansys命令流使用方法
在ANSYS中,命令流是一种用于执行特定操作的自动化工具。
以下是ANSYS命令流使用的一般步骤:
1. 打开ANSYS软件并加载您要使用的工程文件。
2. 在ANSYS Graphical User Interface (GUI) 中,将鼠标指针放
在工具栏上。
在“Run”下拉菜单中选择“Command Line”。
3. 在命令行窗口中,输入和编辑您想执行的命令。
您可以使用ANSYS的命令语言以及相关命令进行模型操作、网格生成、
求解等。
4. 您可以通过多种方式输入命令:直接在命令行中输入、从脚本文件中读取、从ANSYS GUI中的日志文件中复制粘贴等。
5. 您可以使用命令流中的参数和变量来进行自动化操作。
使用“!VARIABLE”语句定义变量,并通过“!VARIABLE = value”语
句赋值。
6. 使用ANSYS的各种功能命令对模型进行操作。
例如,在预
处理阶段,您可以使用命令生成几何体、定义材料属性、设定网格、添加边界条件等。
7. 在求解阶段,使用命令启动求解器,设置求解器选项,运行求解器,并监视求解器的输出。
8. 在结果后处理阶段,使用命令读取并处理结果数据,生成图形、报告等。
9. 执行命令流,您可以一次性执行整个命令流,或者逐个执行命令。
10. 您还可以将命令流保存为脚本文件,以便将来再次使用。
以上是ANSYS命令流的一般用法,具体的命令和语法取决于您的特定需求和ANSYS的版本。
建议您参考ANSYS的官方文档和教程,以获得更详细和准确的使用说明。
ANSYS命令流学习笔记5-workbench中命令流的一些应用

ANSYS命令流学习笔记5-workbench中命令流的⼀些应⽤!ANSYS命令流学习笔记5workbench中命令流的⼀些应⽤学习重点:1. 定义单元类型2. 使⽤各向异性材料时,定义其单元为圆柱坐标系3. 有⾓度吊装时,定义吊装约束4. workbench、APDL的联合仿真案例如下:如下图模型,四个顶点通过杆件连接,进⾏吊装时的有限元分析。
1. 建⽴模型,设定必要的坐标系。
分成两个solid,内部的圆柱,剩余的矩形部分。
建⽴两个坐标系,分别⽤于指定各向异性材料的属性、吊装的固定点。
下图,建⽴圆柱坐标系,编号100,⽤于指定各向异性材料。
下图,建⽴直⾓坐标系,编号12,⽤于指定吊装固定点。
2. 建⽴named selection,⽅便在命令流中选择必要的元素。
下图,将四个吊装点,中间的圆柱,分别定义为任何名称,必须是英⽂才能⽤于APDL 命令中。
3. 定义边界条件,施加重⼒加速度,在static structural 下插⼊command(APDL) ,内容如下/prep7allscmsel,s,c1,elem !选择c1单元所有节点,既圆柱体的所有单元emodif,all,esys,100 !其坐标系转换为100坐标系,因为缠绕的各向异性材料必须在圆柱坐标系下定义单元的坐标。
!完成对各向异性材料的坐标系设定。
et,10,10 !定义编号为10的,link10单元r,10,0.01 !定义编号为10的实常数0.01,⽤于定义link10单元的截⾯积0.01mm^2*get,nmax,node,,num,max !获取node的最⼤数值,储存在nmax名称的变量⾥csys,12 !调⽤csys12坐标系n,nmax+1, !csys坐标原点建⽴node,后⾯会将其固定,既吊装的固定点mat,1type,10 !选取编号10的单元类型real,10 !选取编号10的实常数cmsel,s,kk1,node !选择kk1点,kk1已经定义为named selection*get,k1,node,,num,max !获取已选节点中的节点数最⼤值,既kk1的节点编号,取值为k1cmsel,s,kk2,node ! k2,k3,k4⽅法类型k1*get,k2,node,,num,maxcmsel,s,kk3,node*get,k3,node,,num,maxcmsel,s,kk4,node*get,k4,node,,num,maxalls !全选e,nmax+1,k1e,nmax+1,k2e,nmax+1,k3e,nmax+1,k4 !建⽴四个link单元d,nmax+1,allalls/sol此外,下图中单位必须保持⼀致,不然计算很容易出问题。
ansys命令流说明

24. AINV,NA,NV(面体相交)
25. AL,L1,L2,…,L9,L10(以线定义面)
26. ALIST,NA1,NA2,NINC,Lab(列表显示面的信息)
【注】Lab=HPT时,显示面上硬点信息,默认为空。
【注】*************
13. ADD,IR, IA, IB, IC, Name, --,-- , FACTA, FACTB, FACTC(变量加运算)
14. ADELE,NA1,NA2,NINC,KSWP(删除面)
【注】KSWP =0删除面但保留面上关键点、1删除面及面上关键点。
RETAIN=ON(对于全是四边形的网格,细化不会将三角形引入)、OFF(可能将三角形引入)
51. AREVERSE,ANUM,NOEFLIP(将面的法线方向反向)
52. AROTAT,NL1,NL2,NL3,NL4,NL5,NL6,PAX1,PAX2,ARC,NSEG(绕轴旋转生成面)
78. BFK,KPOI,Lab,VAL1,VAL2,VAL3,PHASE(在关键上施加体载荷)
79. BFKDELE,KPOI,Lab(删除关键点上的体载荷)
80. BFKLIST,KPOI,Lab(列表显示线关键点上的体载荷)
81. BFL,LINE,Lab,VAL1,VAL2,VAL3,PHASE(在线上施加体载荷)
15. ADRAG,NL1,NL2,…,NL6,NLP1,NLP2,…,NLP6(将既有线沿一定路径拖拉成面)
16. AESIZE,ANUM,SIZE(指定面上划分单元大小)
17. AFILLT,NA1,NA1,RAD(两面之间生成倒角面)
ANSYS命令流
5.3 元素形状定义元素形状在2-D结构中可分为四边形和三角形,在3-D结构中可分为六面体和角锥体。
当实体模型进行对应网格划分时,2-D及3-D结构所产生的元素必为四边形及六面体,当无法进行对应网格化时,程序会自动用自由网格化,所以2-D结构将自行以四边形和三角形的混合方式进行,3-D结构以角锥体方式进行。
网格化,有默认尺寸大小,也就是说不给定线段和网格数目,仍然可以进行网格划分,但不一定能满足设计者的要求。
元素大小基本上在线段上定义,可用线段数目和线段长度来划分,通常以线段数目分割比较方便。
分割时可采用均分或不均分,不均分以线段方向或中间为准,根据数定义可得到渐增或渐减的效果。
除此之外,也可以以整体对象为基准,确定网格的大小。
此外在自由网格化一般不需要定义线段的数目及大小,程序将提供智能化控制(SMRTSIZE);而指定线段进行元素数目及大小的声明,大多用于对应网格化。
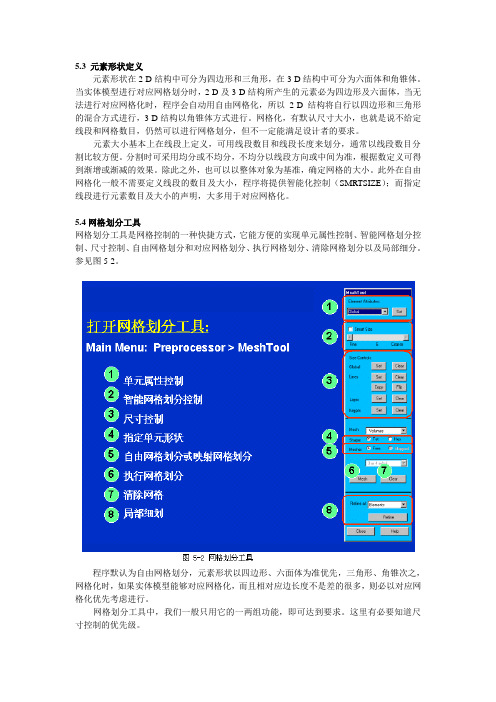
5.4网格划分工具网格划分工具是网格控制的一种快捷方式,它能方便的实现单元属性控制、智能网格划分控制、尺寸控制、自由网格划分和对应网格划分、执行网格划分、清除网格划分以及局部细分。
参见图5-2。
程序默认为自由网格划分,元素形状以四边形、六面体为准优先,三角形、角锥次之,网格化时,如果实体模型能够对应网格化,而且相对应边长度不是差的很多,则必以对应网格化优先考虑进行。
网格划分工具中,我们一般只用它的一两组功能,即可达到要求。
这里有必要知道尺寸控制的优先级。
缺省单元尺寸控制:●对线划分的指定被最先考虑●关键点附近的单元尺寸作为第二级考虑对象●总体单元尺寸作为第三级考虑对象●缺省尺寸最后考虑智能单元尺寸的优先顺序●对线划分的指定被最先考虑●关键点附近的单元尺寸作为第二级考虑对象,当考虑到小的几何特征和曲率时,可以忽略它●总体单元尺寸作为第三级考虑对象,当考虑到小的几何特征和曲率时,可以忽略它●智能单元尺寸设置最后考虑【例5-1】综合练习,如图5-3所示/PREP7ET,1,PLANE42K,1,,-2.5 $K,2,6,-2.5 $K,3,,2.5 $K,4,6,2.5CSYS,1K,5,10,-30 $K,6,10,30CSYS,0SA VEL,1,2 $L,4,3CSYS,1,L,2,4 $L,5,6CSYS,0A,1,2,4,3A,2,5,6,4SA VE ! 可以有RESUME命令回复到当前点AMESH,ALL ! 此时网格以系统默认的尺寸进行自由划分,但由于面积符合对应网格化的要求,所以会进行对应网划分。
ANSYS命令流
ANSYS命令流一、建模/PREP7 进入前处理器。
(执行命令前要先输这个,否则会悲剧的提示错误。
)ET,1,SOLID45 定义单元类型1为SOLID45.MP,EX,1,3.45E8 定义材料属性1的弹性模量为3.45e8MP,PRXY,1,0.2 定义材料属性1的泊松比为0.2MP,DENS,1,2.653061E-3 定义材料属性1的密度为2.653061E-3R,2,5.4438,0.006868 定义实常数2,面积为5.4438,初应变为0.006868 (这个实常数定义对应于LINK8单元,其他的单元要查相应的格式。
)K,601,30,-94.4835,-1298.9 建立关键点601,坐标为后面的三个值。
KGEN,2,601,610,1,40,0,0,20 复制节点601至610一次,每个节点x坐标增量为40,y、z增量为0,节点编号增量为20。
L,902,903 连接节点901、902成线。
LGEN,13,127,,,50,,,3 复制线的命令流。
将线127复制12次,x 向位置增量为50,y、z向为0,线编号增量为3。
LSEL,S,LINE,,127,152 从所有图素中选择编号125至152间所有的线。
LSEL,S,LINE,,125 从所有图素中选择编号为125的线。
LSEL,A,LINE,,126 在上面已经选择线125的基础上,添加选择编号为126的线。
A,101,102,103,104,105,106,107 将上述7个关键点(最多10个)练成面。
VOFFST,113,175,400 将面113沿着垂直于面的方向偏移175,节点编号增量为400。
V,301,3301,306,307, 401, 3401, 406, 407 将上述八个关键点连结成体。
(注意前四个点和后四个点的选择顺序需一致,即同为顺时针或逆时针)-注意:关键点个数最多8个。
V,304,3304,305, 404,3404,405 将上述六个关键点连结成体。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
EX1.1 (LINK1)(1)进入后处理模块,显示节点位移和杆件内力MID_NODE = NODE (A/2,-B,0 )! 寻找距离位置(A/2,-B,0)最近的点,存入MID_NODE*GET,DISP,NODE,MID_NODE,U,Y!提取节点MID_NODE上的位移UY,若果已知要求的节点,直接提取即可。
LEFT_EL = ENEARN (MID_NODE)! 需找距离节点MID_NODE最近的单元,存入LEFT_EL ETABLE,STRS,LS,1! 用轴向应力SAXL的编号“LS,1”定义单元表STRS*GET,STRSS,ELEM,LEFT_EL,ETAB,STRS! 从单元表STRS中提取LEFT_EL单元的应力结果,存入变量STRSS。
注意:提取的轴向应力结果具体到指定的单元。
(2)申明数组,提取计算结果,并比较计算误差*DIM,LABEL,CHAR,2!定义2个元素的字符型数组LABEL*DIM,V ALUE,,2,3!定义2*3的数值型数组V ALUELABEL(1) = 'STRS_MPa','DEF_mm' ! 给字符型数组的第1个元素赋值*VFILL,V ALUE(1,1),DATA,1,-0.05498 ! 给其他数值型数组中的元素赋值*VFILL,V ALUE(1,2),DATA,STRSS,DISP*VFILL,V ALUE(1,3),DATA,ABS(STRSS /1 ) ,ABS( DISP /0.05498 )/OUT,EX1_1,out !将输出内容重定向到文件EX1_1.out/COM ! 以注释形式输出内容/COM,------------------- EX1.1 RESULTS COMPARISON ---------------------/COM,/COM, | TARGET | ANSYS | RATIO/COM,*VWRITE,LABEL(1),V ALUE(1,1),V ALUE(1,2),V ALUE(1,3)(1X,A8,' ',F10.3,' ',F10.3,' ',1F5.3)/COM,----------------------------------------------------------------/OUT ! 结束数据重定向,关闭输出文件FINISH*LIST,EX1_1,out ! 列表显示文件EX1_1.out的内容EX1.2 (LINK1)/PNUM, NODE,1!打开节点编号显示/NUMBER, 2!只显示编号,不使用色彩列表显示节点位移和单元的计算结果PRDISP! 列表显示节点位移值计算结果ETABLE, MFORX,SMISC,1!以杆单元的轴力为内容,建立单元表MFORXETABLE, SAXL, LS, 1 !以杆的轴向应力为内容,建立单元表SAXLETABLE, EPELAXL, LEPEL, 1! 以杆单元的轴向应变为内容,建立单元表EPELAXLPRETAB! 显示单元表中的计算结果/NUMBER, 0!显示编号,并使用彩色PLETAB, MFORX !用色度图显示单元表MFORX中杆件轴力图EX1.3 (LINK1)NSEL,S,LOC,Y,1.0 !选择所有位于Y=1.0位置上的节点FSUM!累计叠加选择集中所有节点上的反力*GET,REAC_1,FSUM,,ITEM,FY !将累加结果中的FY(Y方向的力)保存到变量REAC_1中EX1.4 (LINK1)R,1,65e-6!定义第1类实常数,杆件截面面积为65mm^2,在转化为国际单位制时操作TREF,70 ! 设定参考温度为70度BFUNIF,TEMP,80 ! 温度从原来的70度均匀上升到80度(TREF+10)EX1.5 (PLANE42 AND CONTAC26)ETABLE,STRSX,S,X!定义X方向的应力为单元表STRSX*GET,STRSSX,ELEM,3,ETAB,STRSX!从单元表STRSX中提取3号单元的X向应力,存入STRSSX。
注意:已知某一具体单元,在定义完单元表后,就可以直接用*GET语句提取这一具体单元的表中定义的项目。
EX2.1 (BEAM3)NPLOT! 显示节点位置图形,但是不显示节点号码NPLOT, 1!显示节点位置图形,同时显示节点号码NLIST!列表显示节点在直角坐标系下的坐标值DSYS, 1 !改变显示坐标系,列出资料时,转换到圆柱坐标系NLIST!列表显示节点在圆柱坐标系下的坐标值定义以两端弯矩和剪力为内容的单元表,并列出单元的单元表数据ETABLE,IMOMENT, SMISC, 6!以单元I节点弯矩为内容,定义单元表ETABLE,JMOMENT, SMISC, 12!以单元J节点弯矩为内容,定义单元表ETABLE, ISHEAR, SMISC, 2!以单元I节点剪力为内容,定义单元表ETABLE, JSHEAR, SMISC, 8 !以单元J节点剪力为内容,定义单元表PRETAB!列表显示单元表中单元的计算结果用单元表数据绘制剪力图/TITLE, SHEAR FORCE DIAGRAM! 定义剪力图窗口标题PLLS, ISHEAR, JSHEAR!结构剪力分布图用单元表数据绘制弯矩图/TITLE, BENDING MOMENT DIAGRAM!定义弯矩图窗口标题PLLS, IMOMENT, JMOMENT!结构弯矩分布图EX2.2 (BEAM3)E,1,2!过1,2节点定义第1个单元EGEN,4,1,1 !按照前面的单元模式,生成4次,每次两端节点编号增加1,生成其余3个单元。
SET,1,1 !读入第1荷载步第1子步的计算结果PRNSOL,U,COMP!列表显示节点线位移和阶巅峰线位移的矢量和PRNSOL,ROT,COMP!列表显示节点转角和节点角位移的矢量和EX2.3 (BEAM4)ET,1,BEAM4,,,,,,1 !定义单元类型为BEAM4,并控制在单元坐标系中输出弯矩NSEL,S,,,5!选择编号不小于5的所有节点DSYM,SYMM,X!定义刚选定的所有节点关于X轴的对称位移边界条件SFBEAM,ALL,1,PRES,314!在所有梁单元表面施加均布荷载进入后处理模块,显示位移计算结果,提取左边支座节点的转角和跨中挠度/POST1NSEL,S,,,1,5,4!选中1号和5号节点PRNSOL,U,Z!列表显示选择集中所有节点的Z向位移PRNSOL,ROT,Y !列表显示选择集中的所有节点的绕Y轴的转角ROTYNSEL,ALL!重新选中所有节点PRRSOL!列表显示被约束的节点的支反力(Print Reaction Solution)RGHT_END = NODE (2.54,0,0)!选择距离(2.54,0,0)最近的节点,并存入RGHT_ENDLFT_END = NODE (0,0,0)!选择距离(0,0,0)最近的节点,并存入LFT_END*GET,UZ_MX_C2,NODE,RGHT_END,U,Z!获取节点RGHT_END的线位移UZ*GET,SLOPE_C2,NODE,LFT_END,ROT,Y !获取节点LFT_END的转角ROTYFINISH在时间历程后处理器中,叠加处理5号节点的弯矩/POST26RFORCE,2,RGHT_END,M,Y !叠加RGHT_END节点的弯矩MY,存入第2个POST26变量STORE!保存变量*GET,M_MX_C2,V ARI,2,EXTREM,VMAX !获取第2个POST26变量的最大值FINISHEX2.4 (SOLID5,SOLID95,SOLID98,SOLID147)smrt,off ! 关闭智能化功能LESIZE,ALL,,,10! 定义所有线的划分段数为10段ESIZE,25.4! 定义默认的单元尺寸为25.4V,1,2,4,3,5,6,8,7! 用关键点连接成体VMESH,1 ! 执行体单元划分操作FK,2,FX,4.4483/4! 在2号关键点上施加沿着X方向的,大小为4.4483/4的轴向力*REPEAT,4,2 ! 将前面的命令执行4次,每次操作对象的编号增加2,即完成对2、4、6关键点的荷载定义FKDELE,ALL,FY ! 删除所有关键点上的轴向力定义宏程序,完成自由端位移计算结果的处理*CREATE,MAC! 定义宏程序计算这些结果SET,ARG1,1 ! 定义参数ARG1=1LCDEF,ARG1,ARG1! 基于计算结果定义荷载工况NSEL,S,LOC,X,152.4! 选择节点PRNSOL,U,COMP! 打印位移结果及其节点位移矢量和LCFACT,ARG1,ARG2! 将缩放因子“AGR2”应用给荷载工况1LCASE,ARG1! 将工况1读入到数据库PRNSOL,U,COMP! 打印位移结果及其节点位移矢量和*END! 结束宏程序的定义使用上面定义的宏程序处理所有的3个工况/COM*** !*USE,MAC,1,(1/7.6E-4) ! 使用宏程序MAC,使用参数1,(1/7.6E-4)SET,1,1 ! 读入第1荷载步的计算结果LCSEL,S,0,0 ! 选择荷载步的子集N1=NODE(152.4 , 0, 0) ! 选择距离(152.4 , 0, 0)位置最近的节点,命名为N1*GET,UX1,NODE,N1,U,X ! 获取节点N1的位移UX处理第2个荷载步的计算结果*USE,MAC,2,(1/2.4712) ! 使用宏MAC,使用参数2,(1/2.4712)SET,2,1 !LCSEL,S,0,0 !*GET,UY1,NODE,N1,U,Y !处理第3个荷载步的计算结果*USE,MAC,3,(1/10.9646) !SET,3,1 !LCSEL,S,0,0 !*GET,UZ1,NODE,N1,U,Z !定义字符串变量和相应的理论计算结果*DIM,LABEL,CHAR,3,2 !*DIM,V ALUE,,3,3 !LABEL(1,1) = 'DEFL X ','DEFL Y ','DEFL Z '!LABEL(1,2) = 'mm','mm','mm' !*VFILL,V ALUE(1,1),DATA,7.6E-4,2.471,10.965 !*VFILL,V ALUE(1,2),DATA,UX1,UY1,UZ1!*VFILL,V ALUE(1,3),DATA,ABS(UX1/(7.6E-4)),ABS(UY1/2.471),ABS(UZ1/10.965) SA VE, TABLE_1 ! 保存数据到数据库TABLE_1FINISHNSEL,S,LOC,X,152.4NSEL,R,LOC,Y,2.54NSEL,R,LOC,Z,1.27*GET,MIDD,NDMX ! 获取当前最大节点号,并存入MIDD从第1个表中恢复数据,绘制单元应力云图RESUME,TABLE_1 ! 从数据库中恢复数据/COM *** CLIPPED AND CAPPED DISPLAY OF STRESS CONTOURS ***NSEL,ALL ! 选择所有节点/VIEW,1,2,1,1 ! 设置观察方向为从(2,1,1)指向原点EPLOT ! 绘制单元图/TYPE,1,CAP ! 显示梁的剖面图/DIST,1,5.08 ! 设置观察距离为5.08mm/FOCUS,1,.3,.15,.09 ! 设置截开截面的位置/Auto ! 以最佳比例显示PLNSOL,S,X ! 显示X方向的应力删除宏文件,临时表文件TABLE_*/DELETE,MAC ! 删除宏文件/DELETE,TABLE_1 ! 删除临时性数据库EX2.5 (PIPE16)F,2,MZ,1112*914! 定义作用在节点2上的绕Z轴大小为M=FD=1112*914N.MM的力偶F,2,FX,-1112 ! 定义作用在2号节点的沿X轴大小为1112N的力EX2.6 (SHELL63,BEAM4)定义耦合自由度,以保证变形对称CP,1,UZ,2,12 ! 定义2号节点和12号节点的UZ自由度为耦合自由度,定义为集合1CP,2,ROTY,2,12! 定义2号节点和12号节点的ROTY自由度为耦合自由度,定义为集合1 CPSGEN,6,1,1,2! 按照前面定义的耦合自由度集合1到2,循环6次生成其余的耦合自由度ETABLE,STRS,S,1 !用壳单元SHELL63的最大拉应力S1为内容定义单元表STRS ESORT,STRS!按最大拉应力对单元表STRS的排序*GET,SMAX1,SORT,,MAX!获取排序后的最大拉应力值,存入变量SMAX1PRNSOL,DOF !列表显示节点位移计算结果*DO,I,1,10 !循环10次定义不同位置的单元不同的截面几何参数R,I,1,1,(I-1)*76.2*12.7*12.7*12.7/120,6.35,1 !REAL,1,AREA1,IZ1,IY1,TKZB1,TKYB1,IX1 RMORE,1,1,I*76.2*12.7*12.7*12.7/120,6.35,1!AREA2,IZ2,IY2,TKZB2,TKYB2,IX2*ENDDORMODIF,1,3,76.2*12.7*12.7*12.7/120/2 ! 修改实常数RLIST!列出实常数/NOPR !关闭输入显示RESUME,TABLE_2 从数据库中恢复数据/GOPR!打开输入显示EX2.7 (BEAM54)*GET,UY,NODE,1,U,Y ! 提取1号节点的Y方向的线位移UY,并保存到变量UY*status,parm!显示内存变量的内容EX2.8 (BEAM54)CNVTOL,F,,1E-4!设置荷载力的收敛误差为1E-4NCNVTOL,M,,1E-1! 设置集中力偶的收敛误差为0.1N.MEND_NODE = NODE (0,3048/2,0)! 选择距离(0,3048/2,0)最近的节点,命名为END_NODE*GET,DEF,NODE,END_NODE,U,X!提取节点END_NODE的位移UX,存入变量DEFETABLE,TENS,NMISC,1 !以BEAM54的最大拉应力(NMISC,1)为内容定义单元表TENS ETABLE,COMP,NMISC,2 !以BEAM54的最大拉应力(NMISC,2)为内容定义单元表COMP*GET,STS_TENS,ELEM,1,ETAB,TENS !提取1号单元的最大拉应力,存入变量STS_TENS*GET,STS_COMP,ELEM,1,ETAB,COMP !提取1号单元的最大压应力,存入变量STS_COMPEX3.1 (BEAM3)*GET,FCR,MODE,1,FREQ!提取第1阶频率计算结果,并保存到变量FCR.。