S7-200特殊继电器用法
S7-200系列PLC的软继电器及其编号
每个定时器有一个16位的当前值寄存器用于存储定时器累计的 时基增量值(1~32767),另有一个状态位表示定时器的状态。若当 前值寄存器累计的时基增量值大于等子设定值时,定时器的状态位 被置1(线圈得电),该定时器的触点转换。 定时器的定时精度分别为1ms、10ms和100ms三种,CPU221、 CPU222、CPU224及CPU226的定时器编号范围均为T0~T255。
Date: 2014-11-3
Page: 7
第二节 S7-200系列PLC的软继电器及其编号
二、软继电器功能及其编号 4. 辅助继电器(M)
PLC中备有许多辅助继电器,其作用相当于继电器控制电路中 的中间继电器,如图5-5所示,辅助继电器线圈的通断状态只能在 程序内部用指令驱动,每个辅助继电器都有无数对动合触点和动断 触点供编程使用;但这些触点不能直接输出驱动外部负载,只能在 程序内部完成逻辑关系或在程序中驱动输出继电器的线圈,再用输 出继电器的触点驱动外部负载。 辅助继电器与输入、输出继电器 一样可采用位、字节、字或双字来存取。辅助继电器位存取的编号 范围为M0.0~M31.7
特殊存储器smplc中还备有若干特殊存储器特殊存储器位提供大量的状态和控制功能用来在cpu和用户程序之间交换信息特殊存储器能以位字节字或双字来存取其位存取的编号范围为sm00sml797plc中还备有若干特殊存储器特殊存储器位提供大量的状态和控制功能用来在cpu和用户程序之间交换信息特殊存储器能以位字节字或双字来存取其位存取的编号范围为sm00sml797
Date: 2014-11-3
Page: 8
第二节 S7-200系列PLC的软继电器及其编号
二、软继电器功能及其编号 5. 特殊存储器(SM)
PLC中还备有若干特殊存储器,特殊存储器位提供大量的状态 和控制功能,用来在CPU和用户程序之间交换信息,特殊存储器能 以位、字节、字或双字来存取,其位存取的编号范围为SM0.0~ SMl79.7。
S7-200特殊继电器

符号地址注释Always_On SM0.0始终接通为 ONFirst_Scan_On SM0.1仅第一个扫描周期中接通为 ONRetentive_Lost SM0.2如果保持的数据丢失,接通为 ON 一个扫描周期RUN_Power_Up SM0.3以上电方式进入 RUN(运行)模式时,接通为 ON 一个扫描周期Clock_60s SM0.4在 1 分钟的循环周期内,接通为 ON 30 秒,关断为 OFF 30 秒Clock_1s SM0.5在 1 秒钟的循环周期内,接通为 ON 0.5 秒,关断为 OFF 0.5 秒Clock_Scan SM0.6扫描循环时钟,一个周期接通为 ON,下一个周期关断为 OFFMode_Switch SM0.7表明模式开关的当前位置:0 = TERM(终端),1 = RUN(运行)Result_0SM1.0特定指令的操作结果 = 0 时,置位为 1Overflow_Illegal SM1.1特定指令执行结果溢出或数值非法时,置位为 1Neg_Result SM1.2当运算结果为负时,置位为 1Divide_By_0SM1.3当尝试用零除时,置位为 1Table_Overflow SM1.4当填表指令尝试填充表格超限时,置位为 1Table_Empty SM1.5当 LIFO 或 FIFO 指令尝试读取空表时,置位为 1Not_BCD SM1.6当尝试将非 BCD 数转换为二进制数时,置位为 1Not_Hex SM1.7当 ASCII 数据无法转换为有效的十六进制数时,置位为 1Parity_Err SM3.0当端口 0 或端口 1 接收到一个有奇偶校验错误的字符时,置位为 1Comm_Int_Ovr SM4.0当通信中断队列溢出时,置位为 1 (仅在中断程序内有效)Input_Int_Ovr SM4.1当输入中断队列溢出时,置位为 1 (仅在中断程序内有效)Timed_Int_Ovr SM4.2当定时中断队列溢出时,置位为 1 (仅在中断程序内有效)RUN_Err SM4.3当检测到运行时间编程错误时,置位为 1Int_Enable SM4.4表示全局中断使能状态:1 = 中断已使能开放Xmit0_Idle SM4.5当发送器处于空闲状态时(端口 0),置位为 1Xmit1_Idle SM4.6当发送器处于空闲状态时(端口 1),置位为 1Force_On SM4.7当有数据被强制时,置位为 1 : 1 = 有数据被强制,0 = 无数据被强制(仅 22x 有效)IO_Err SM5.0当有任何 I/O 错误时,置位为 1Too_Many_D_IO SM5.1当有过多数字量 I/O 点与 I/O 总线连接时,置位为 1Too_Many_A_IO SM5.2当有过多模拟量 I/O 点与 I/O 总线连接时,置位为 1Too_Many_IM SM5.3当有过多智能 I/O 模块与 I/O 总线连接时,置位为 1DP_Err SM5.7当有 DP 标准总线错误时,置位为 1 (仅限S7-215)P0_Config_0SM30.0端口 0 选择自由口协议或系统协议Save_to_EEPROM_7SM31.7请求执行永久存储区保存操作(0 = 无请求,1 = 保存),保存完毕后 CPU 复位此位符号地址注释HSC0_Status_5SM36.5HSC0 当前计数方向状态:1 = 增计数HSC0_Status_6SM36.6HSC0 当前值等于预置值状态:1 = 相等HSC0_Status_7SM36.7HSC0 当前值大于预置值状态:1 = 大于HSC0_Reset_Level SM37.0HSC0 复位有效电平控制:0 = 高电平有效;1 = 低电平有效HSC0_Rate SM37.2HSC0 计数速率选择:0 = 4x(四倍速),1 = 1xHSC0_Dir SM37.3HSC0 计数方向控制:0 = 减计数;1 = 增计数HSC0_Dir_Update SM37.4HSC0 计数方向更新:0 = 无更新;1 = 更新方向HSC0_PV_Update SM37.5HSC0 预置值更新:0 = 无更新;1 = 更新预置值HSC0_CV_Update SM37.6HSC0 当前值更新:0 = 无更新;1 = 更新当前值HSC0_Enable SM37.7HSC0 使能:0 = 禁止;1 = 使能HSC1_Status_5SM46.5HSC1 当前计数方向状态:1 = 增计数HSC1_Status_6SM46.6HSC1 当前值等于预置值状态:1 = 相等HSC1_Status_7SM46.7HSC1 当前值大于预置值状态:1 = 大于HSC1_Reset_Level SM47.0HSC1 复位有效电平控制:0 = 高电平有效;1 = 低电平有效HSC1_Start_Level SM47.1HSC1 启动有效电平控制:0 = 高电平有效;1 = 低电平有效HSC1_Rate SM47.2HSC1 计数速率选择:0 = 4x(四倍速);1 = 1xHSC1_Dir SM47.3HSC1 计数方向控制:0 = 减计数;1 = 增计数HSC1_Dir_Update SM47.4HSC1 计数方向更新:0 = 无更新;1 = 更新方向HSC1_PV_Update SM47.5HSC1 预置值更新:0 = 无更新;1 = 更新预置值HSC1_CV_Update SM47.6HSC1 当前值更新:0 = 无更新;1 = 更新当前值HSC1_Enable SM47.7HSC1 使能:0 = 禁止;1 = 使能HSC2_Status_5SM56.5HSC2 当前计数方向状态:1 = 增计数HSC2_Status_6SM56.6HSC2 当前值等于预置值状态:1 = 相等HSC2_Status_7SM56.7HSC2 当前值大于预置值状态:1 = 大于HSC2_Reset_Level SM57.0HSC2 复位有效电平控制:0 = 高电平有效;1 = 低电平有效HSC2_Start_Level SM57.1HSC2 启动有效电平控制:0 = 高电平有效;1 = 低电平有效HSC2_Rate SM57.2HSC2 计数速率选择:0 = 4x(四倍速);1 = 1xHSC2_Dir SM57.3HSC2 计数方向控制:0 = 减计数;1 = 增计数HSC2_Dir_Update SM57.4HSC2 计数方向更新:0 = 无更新;1 = 更新方向HSC2_PV_Update SM57.5HSC2 预置值更新:0 = 无更新;1 = 更新预置值HSC2_CV_Update SM57.6HSC2 当前值更新:0 = 无更新;1 = 更新当前值HSC2_Enable SM57.7HSC2 使能:0 = 禁止;1 = 使能符号地址注释PLS0_Err_Abort SM66.4PTO0 包络中止:0 = 无错误;1 = 因 δ 计算错误中止PLS0_Cmd_Abort SM66.5PTO0 包络中止:0 = 未因用户命令中止;1 = 因用户命令中止PLS0_Ovr SM66.6PTO0 管道溢出:0 = 无溢出;1 = 管道溢出PLS0_Idle SM66.7PTO0 空闲:0 = PTO 正在执行;1 = PTO 空闲PLS0_Cycle_Update SM67.0PTO0/PWM0 周期时间值更新:1 = 写入新的周期时间PWM0_PW_Update SM67.1PTO0/PWM0 脉冲宽度值更新:1 = 写入新的脉冲宽度PTO0_PC_Update SM67.2PTO0 脉冲数更新:1 = 写入新的脉冲数PLS0_TimeBase SM67.3PTO0/PWM0 时基:0 = 1μs/单位;1 = 1ms/单位PWM0_Sync SM67.4PWM0 同步更新:0 = 非同步更新;1 = 同步更新PTO0_Op SM67.5PTO0:0 = 单段操作;1 = 多段操作PLS0_Select SM67.6PTO0/PWM0 模式选择:0 = PTO;1 = PWMPLS0_Enable SM67.7PTO0/PWM0 使能:1 = 使能PLS1_Err_Abort SM76.4PTO1 包络中止:0 = 无错误;1 = 因δ计算错误中止PLS1_Cmd_Abort SM76.5PTO1 包络中止:0 = 未因用户命令中止;1 = 因用户命令中止PLS1_Ovr SM76.6PTO1 管道溢出:0 = 无溢出;1 = 管道溢出PLS1_Idle SM76.7PTO1 空闲:0 = PTO正在执行;1 = PTO空闲PLS1_Cycle_Update SM77.0PTO1/PWM1 周期时间值更新:1 = 写入新的周期时间PWM1_PW_Update SM77.1PTO1/PWM1 脉冲宽度值更新:1 = 写入新的脉冲宽度PTO1_PC_Update SM77.2PTO1 脉冲数更新:1 = 写入新的脉冲数PLS1_TimeBase SM77.3PTO1/PWM1 时基:0 = 1μs/单位;1 = 1ms/单位PWM1_Sync SM77.4PWM1 同步更新:0 = 非同步更新;1 = 同步更新PTO1_Op SM77.5PTO1:0 = 单段操作;1 = 多段操作PLS1_Select SM77.6PTO1/PWM1 模式选择:0 = PTO;1 = PWMPLS1_Enable SM77.7PTO1/PWM1 使能:1 = 使能P0_Stat_Rcv_0SM86.0 1 = 信息接收终止:奇偶校验错误P0_Stat_Rcv_1SM86.1 1 = 信息接收终止:达到最大字符计数P0_Stat_Rcv_2SM86.2 1 = 信息接收终止:定时器到期P0_Stat_Rcv_5SM86.5 1 = 信息接收终止:收到结束字符P0_Stat_Rcv_6SM86.6 1 = 信息接收终止:输入参数错误或缺少起始或结束条件P0_Stat_Rcv_7SM86.7 1 = 信息接收终止:用户禁止命令P0_Ctrl_Rcv_1SM87.10 = 忽略断点状态;1 = 将断点状态用作信息起始检测P0_Ctrl_Rcv_2SM87.20 = 忽略SMW92,1 = 如果超过 SMW92 中的定时,终止接收符号地址注释P0_Ctrl_Rcv_3SM87.30 = 定时器是字符间定时器,1 = 定时器是信息间定时器P0_Ctrl_Rcv_4SM87.40 = 忽略 SMW90,1 = 使用 SMW90 中的数据检测空闲条件P0_Ctrl_Rcv_5SM87.50 = 忽略 SMB89,1 = 使用 SMB89 中的数据检测信息结束P0_Ctrl_Rcv_6SM87.60 = 忽略 SMB88,1 = 使用 SMB88 中的数据检测信息开始P0_Ctrl_Rcv_7SM87.70 = 信息接收功能被禁止,1 = 信息接收功能被使能P1_Config_0SM130.0端口 1 选择自由口协议或系统协议HSC3_Status_5SM136.5HSC3 当前计数方向状态:1 = 增计数HSC3_Status_6SM136.6HSC3 当前值等于预置值状态:1 = 相等HSC3_Status_7SM136.7HSC3 当前值大于预置值状态:1 = 大于HSC3_Dir SM137.3HSC3 计数方向控制:0 = 减计数;1 = 增计数HSC3_Dir_Update SM137.4HSC3 计数方向更新:0 = 无更新;1 = 更新方向HSC3_PV_Update SM137.5HSC3 预置值更新:0 = 无更新;1 = 更新预置值HSC3_CV_Update SM137.6HSC3 当前值更新:0 = 无更新;1 = 更新当前值HSC3_Enable SM137.7HSC3 使能:0 = 禁止;1 = 使能HSC4_Status_5SM146.5HSC4 当前计数方向状态:1 = 增计数HSC4_Status_6SM146.6HSC4 当前值等于预置值状态:1 = 相等HSC4_Status_7SM146.7HSC4 当前值大于预置值状态:1 = 大于HSC4_Reset_Level SM147.0HSC4 复位有效电平控制:0 = 高电平有效;1 = 低电平有效HSC4_Rate SM147.2HSC4 计数速率选择:0 = 4x(四倍速);1 = 1xHSC4_Dir SM147.3HSC4 计数方向控制:0 = 减计数;1 = 增计数HSC4_Dir_Update SM147.4HSC4 计数方向更新:0 = 无更新;1 = 更新方向HSC4_PV_Update SM147.5HSC4 预设值更新:0 = 无更新;1 = 更新预置值HSC4_CV_Update SM147.6HSC4 当前值更新:0 = 无更新;1 = 更新当前值HSC4_Enable SM147.7HSC4 使能:0 = 禁止;1 = 使能HSC5_Status_5SM156.5HSC5 当前计数方向状态:1 = 增计数HSC5_Status_6SM156.6HSC5 当前值等于预置值状态:1 = 相等HSC5_Status_7SM156.7HSC5 当前值大于预置值状态:1 = 大于HSC5_Dir SM157.3HSC5 计数方向控制:0 = 减计数;1 = 增计数HSC5_Dir_Update SM157.4HSC5 计数方向更新:0 = 无更新;1 = 更新方向HSC5_PV_Update SM157.5HSC5 预设值更新:0 = 无更新;1 = 更新预置值HSC5_CV_Update SM157.6HSC5 当前值更新:0 = 无更新;1 = 更新当前值HSC5_Enable SM157.7HSC5 使能:0 = 禁止;1 = 使能符号地址注释P1_Stat_Rcv_0SM186.0 1 = 信息接收终止:奇偶校验错误P1_Stat_Rcv_1SM186.1 1 = 信息接收终止:达到最大字符计数P1_Stat_Rcv_2SM186.2 1 = 信息接收终止:定时器到期P1_Stat_Rcv_5SM186.5 1 = 信息接收终止:收到结束字符P1_Stat_Rcv_6SM186.6 1 = 信息接收终止:输入参数错误或缺少起始或结束条件P1_Stat_Rcv_7SM186.7 1 = 信息接收终止:用户禁止命令P1_Ctrl_Rcv_1SM187.10 = 忽略断点状态;1 = 将断点状态用作讯息检测开始P1_Ctrl_Rcv_2SM187.20 = 忽略 SMW192,1 = 如果超过 SMW192 中的定时,终止接收P1_Ctrl_Rcv_3SM187.30 = 定时器是字符间定时器,1 = 定时器是信息间定时器P1_Ctrl_Rcv_4SM187.40 = 忽略 SMW190,1 = 使用 SMW190 中的数据检测空闲条件P1_Ctrl_Rcv_5SM187.50 = 忽略 SMB189,1 = 使用 SMB189 中的数据检测信息结束P1_Ctrl_Rcv_6SM187.60 = 忽略 SMB188,1 = 使用 SMB188 中的数据检测信息开始P1_Ctrl_Rcv_7SM187.70 = 信息接收功能被禁止,1 = 信息接受功能被使能Receive_Char SMB2包含自由端口通信过程中从端口 0 或端口 1 收到的每个字符CPU_ID SMB6CPU 识别(ID)号EM0_ID SMB8模块 0 识别(ID)寄存器EM0_Err SMB9模块 0 错误寄存器EM1_ID SMB10模块 1 识别(ID)寄存器EM1_Err SMB11模块 1 错误寄存器EM2_ID SMB12模块 2 识别(ID)寄存器EM2_Err SMB13模块 2 错误寄存器EM3_ID SMB14模块 3 识别(ID)寄存器EM3_Err SMB15模块 3 错误寄存器EM4_ID SMB16模块 4 识别(ID)寄存器EM4_Err SMB17模块 4 错误寄存器EM5_ID SMB18模块 5 识别(ID)寄存器EM5_Err SMB19模块 5 错误寄存器EM6_ID SMB20模块 6 识别(ID)寄存器EM6_Err SMB21模块 6 错误寄存器Pot0_Value SMB28包含与模拟电位器 0 对应的数值Pot1_Value SMB29包含与模拟电位器 1 对应的数值P0_Config SMB30通信端口 0 设置:奇偶校验、每个字符的数据位数目、波特率和协议符号地址注释Save_to_EEPROM SMB31设置保存参数,以便将 V 存储区中的一个数据保存至永久性存储区(EEPROM)Time_0_Intrvl SMB34定时中断 0 的时间间隔(从 1 至 255,以 1 毫秒为增量)。
继电器的相关学问与使用 继电器如何操作

继电器的相关学问与使用继电器如何操作继电器是依据电磁效应设计而成一种可控型的开关器件,紧要有线圈、衔铁和触点构成,所起到的功能是弱电掌控强电、小电流掌控大电流。
在工业自动化、新能源汽车继电器是依据电磁效应设计而成一种可控型的开关器件,紧要有线圈、衔铁和触点构成,所起到的功能是弱电掌控强电、小电流掌控大电流。
在工业自动化、新能源汽车(高压接触器)、通讯行业有着广泛的应用。
下面介绍一下继电器的相关学问和使用方法。
继电器的工作原理继电器的输入端是线圈,输出端是机械触点。
当线圈两端加上合适的电压后,线圈中会有电流流过,电生磁,线圈的铁芯产生磁力,使的衔铁动作让触点动作。
继电器的作用继电器可以实现弱电掌控强电、小电流掌控大电流的作用。
例如工控行业,常常用到继电器来掌控交流电磁阀、交流电机等,而主控的核心是PLC。
用PLC来掌控继电器的线圈,交流负载接入触点的回路中,可以实现PLC掌控交流负载的目的。
继电器的关键参数继电器的关键参数有这么几个:线圈电压、触点容量和使用寿命。
所谓线圈电压,就是指继电器工作时加在线圈两端的额定电压,在购买继电器时;店家都会询问要买几伏的,就是指继电器的线圈电压,如5V继电器、12V继电器、24V继电器等。
触点容量,就是在掌控回路中触点最大能承受的工作电压和工作电流,假如5A/DC30V,10A/AC220V。
机械式继电器的触点都是具有使用寿命的,如其机械耐久性为10000次,5000次等。
继电器还有其他参数如,线圈功率、线圈电阻、释放电压等。
—专业分析仪器服务平台,试验室仪器设备交易网,仪器行业专业网络宣扬媒体。
相关热词:等离子清洗机,反应釜,旋转蒸发仪,高精度温湿度计,露点仪,高效液相色谱仪价格,霉菌试验箱,跌落试验台,离子色谱仪价格,噪声计,高压灭菌器,集菌仪,接地电阻测试仪型号,柱温箱,旋涡混合仪,电热套,场强仪万能材料试验机价格,洗瓶机,匀浆机,耐候试验箱,熔融指数仪,透射电子显微镜。
西门子plc S7-200 PLC对电动机断电延时、Y-△启动运转带半波能耗制动

西门子PLC S7-200 PLC对电动机断电延时、Y-△启动运转带半波能耗制动1. 引言PLC(可编程逻辑控制器)是一种常见的自动化控制设备,广泛应用于工业领域。
西门子PLC S7-200是西门子公司推出的一款经典PLC型号,具有高性能和可靠性。
本文将介绍如何使用西门子PLC S7-200对电动机进行断电延时、Y-△启动运转,并添加半波能耗制动功能。
通过这些控制操作,可以实现对电动机的更精确控制和能耗的优化。
2. 断电延时控制电动机断电延时控制是指在电动机停止运转后,延迟一定时间再切断电源。
这个延时时间可以根据具体需求进行调整。
在使用西门子PLC S7-200进行断电延时控制时,首先需要进行硬件连接。
将电动机和PLC进行连接,确保电机的电源通过PLC进行控制。
然后,编写相应的控制程序,实现断电延时功能。
以下为示例代码:ladder |—[ ]—[/]—( )— | TON K3 Q | Timer1s Q | PT |—[ ]—上述代码是一个简单的断电延时控制程序。
通过TON(计时器)和PT(延时定时器)函数,可以实现延时控制。
具体的延时时间可以根据具体需求进行调整。
在电动机停止运转后,TON函数开始计时,当计时时间超过设定的延时时间后,PT函数的输出Q切换为ON状态,通过该输出信号可以进行电源的切断。
## 3. Y-△启动运转控制Y-△启动是一种常见的电动机启动方式,适用于大功率电动机。
在启动过程中,先通过Y 接线使电动机以低电压、低转矩启动,并在一定时间后切换为△接线以实现正常运转。
使用西门子PLC S7-200可以方便地实现Y-△启动运转控制。
以下为示例代码:Coil CoilY1 Y2 Coil|---[/]---( )---- ( )K2 ( )K3 QK4 Q在上述代码中,使用了Coil(线圈)和K(继电器)函数来实现逻辑控制。
通过控制Y1、Y2两个继电器,可以实现Y-△启动的切换。
西门子S7-200 特殊继电器及中断事件号
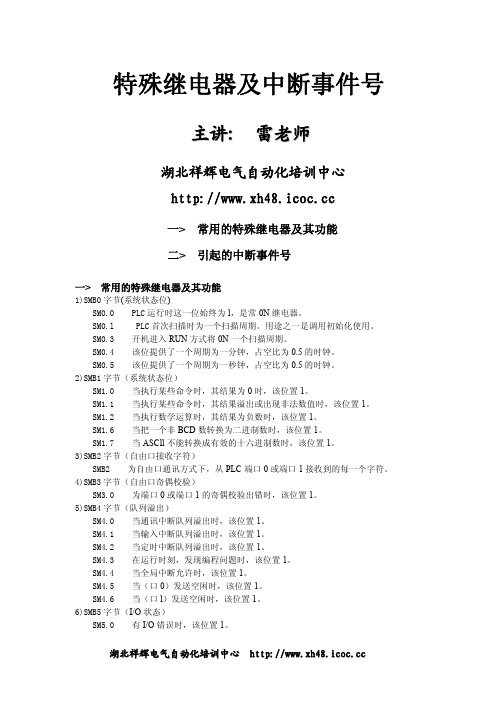
特殊继电器及中断事件号基础知识主讲:雷老师湖北祥辉电气自动化培训中心一>常用的特殊继电器及其功能二>引起的中断事件号一>常用的特殊继电器及其功能1)SMB0字节(系统状态位)SM0.0PLC运行时这一位始终为l,是常0N继电器。
SM0.l PLC首次扫描时为一个扫描周期。
用途之一是调用初始化使用。
SM0.3开机进入RUN方式将0N一个扫描周期。
SM0.4该位提供了一个周期为一分钟,占空比为0.5的时钟。
SM0.5该位提供了一个周期为一秒钟,占空比为0.5的时钟。
2)SMB1字节(系统状态位)SM1.0当执行某些命令时,其结果为0时,该位置1。
SM1.1当执行某些命令时,其结果溢出或出现非法数值时,该位置1。
SM1.2当执行数学运算时,其结果为负数时,该位置1。
SM1.6当把一个非BCD数转换为二进制数时,该位置1。
SM1.7当ASCll不能转换成有效的十六进制数时,该位置1。
3)SMB2字节(自由口接收字符)SMB2为自由口通讯方式下,从PLC端口0或端口1接收到的每一个字符。
4)SMB3字节(自由口奇偶校验)SM3.0为端口0或端口1的奇偶校验出错时,该位置1。
5)SMB4字节(队列溢出)SM4.0当通讯中断队列溢出时,该位置1。
SM4.1当输入中断队列溢出时,该位置1。
SM4.2当定时中断队列溢出时,该位置1。
SM4.3在运行时刻,发现编程问题时,该位置1。
SM4.4当全局中断允许时,该位置1。
SM4.5当(口0)发送空闲时,该位置1。
SM4.6当(口l)发送空闲时,该位置1。
6)SMB5字节(I/O状态)SM5.0有I/O错误时,该位置1。
SM5.1当I/O总线上接了过多的数字量I/O点时,该位置1。
SM5.2当I/O总线上接了过多的模拟量I/O点时,该位置1。
SM5.7当DP标准总线出现错误时,该位置1。
7)SMB6字节(CPU识别寄存器)SM6.7~6.4=0000为CPU212/CPU222SM6.7~6.4=0010为CPU214/CPU224SM6.7~6.4=0110为CPU221SM6.7~6.4=1000为CPU215SM6.7~6.4=1001为CPU216/CPU2268)SMB8到SMB21字节(I/O模块识别和错误寄存器)SMB8模块0识别寄存器SMB9模块0错误寄存器SMB10模块1识别寄存器SMB11模块1错误寄存器SMB12模块2识别寄存器SMB13模块2错误寄存器SMB14模块3识别寄存器SMB15模块3错误寄存器SMB16模块4识别寄存器SMB17模块4错误寄存器SMB18模块5识别寄存器SMB19模块5错误寄存器SMB20模块6识别寄存器SMB21模块6错误寄存器9)SMW22到SMW26字节(扫描时间)SMW22上次扫描时间SMW24进入RUN方式后,所记录的最短扫描时间SMW26进入RUN方式后,所记录的最长扫描时间10)SMB28和SMB29字节(模拟电位器)SMB28存储模拟电位0的输入值SMB29存储模拟电位l的输入值11)SMB30和SMB130字节(自由口控制寄存器)SMB30控制自由口0的通讯方式SMB130控制自由口1的通讯方式12)SMB34和SMB35字节(定时中断时间间隔寄存器)SMB34定义定时中断0的时间间隔(从5ms…255ms,以1ms为增量)SMB35定义定时中断l的时间间隔(从5ms…255ms,以1ms为增量)13)SMB36到SMB65字节(高速计数器HSC0、HSCl和HSC2寄存器)SMB36HSC0当前状态寄存器SMB37HSC0控制寄存器SMD38HSC0新的当前值SMD42HSC0新的予置值SMB46HSC1当前状态寄存器SMB47HSC1控制寄存器SMD48HSC1新的当前值SMD52HSC1新的予置值SMB56HSC2当前状态寄存器SMB57HSC2控制寄存器SMD58HSC2新的当前值SMD62HSC2新的予置值14)SMB66到SMB85字节(监控脉冲输出PTO和脉宽调制PWM功能)15)SMB86到SMB94,SMB186到SMB179字节(接收信息控制)SMB86到SMB94为通讯口0的接收信息控制SMB186到SMB179为通讯口1的接收信息控制接收信息状态寄存器SMB86和SMB186:接收信息控制寄存器SMB87和SMB187:16)SMB98和SMB99字节(有关扩展总线的错误号)17)SMB131到SMB165字节(高速计数器HSC3、HSC4和HSC5寄存器)18)SMB166到SMB179字节(PTO0、PTO1的包络步的数量、包络表的地址和V存储器中表的地址)二>引起的中断事件号输入信号(8项).通讯口(6项).定时器(4项).高速计数器(14项).脉冲输出指令(2项)引起的中断事件表3-9-l中断描素CPU221CPU222CPU224CPU226事件号0I0.0上升沿有有有有1I0.0下降沿有有有有2I0.1上升沿有有有有3I0.1下降沿有有有有4I0.2上升沿有有有有5I0.2下降沿有有有有6I0.3上升沿有有有有7I0.3下降沿有有有有8端口0接收字符有有有有9端口0发送字符有有有有10定时中断0(SMB34)有有有有11定时中断1(SMB35)有有有有12HSC0当前值=预置值有有有有13HSC1当前值=预置值有有14HSC1输入方向改变有有15HSC1外部复位有有16HSC2当前值=预置值有有17HSC2输入方向改变有有18HSC2外部复位有有有19PLS0脉冲数完成中断有有有有20PLS1脉冲数完成中断有有有有21T32当前值=预置值有有有有22T96当前值=预置值有有有有23端口0接收信息完成有有有有24端口1接收信息完成有25端口1接收字符有26端口l发送字符有27HSC0输入方向改变有有有有28HSC0外部复位有有有有29HSC4当前值=预置值有有有有30HSC4输入方向改变有有有有31HSC4外部复位有有有有32HSC3当前值=预置值有有有有33HSC5当前值=预置值有有有有S7-200可以在梯形图编辑器内的任何位置右击鼠标并选择插入中断。
特殊标志继电器(SM)
特殊标志继电器(SM )有些辅助继电器具有特殊功能或存储系统的状态变量、有关的控制参数和信息,我们称为特殊标志继电器。
用户可以通过特殊标志来沟通PLC 与被控对象之间的信 息,如可以读取程序运行过程中的设备状态和运算结果信息,利用这些信息用程序实现一定的控制动作。
用户也可通过直接设置某些特殊标志继电器位来使设备实现 某种功能。
特殊标志继电器用“SM ”表示,特殊标志继电器区根据功能和性质不同具有位、字节、字和双字操作方式。
其中SMB0、SMB1为系统状态字,只能读取其中的状态数据,不能改写,可以位寻址。
系统状态字中部分常用的标志位说明如下: SM0.0:始终接通;SM0.1:首次扫描为1,以后为0,常用来对程序进行初始化; SM0.2:当机器执行数学运算的结果为负时,该位被置1; SM0.3:开机后进入RUN 方式,该位被置1一个扫描周期;SM0.4:该位提供一个周期为1分钟的时钟脉冲,30秒为1,30秒为0; SM0.5:该位提供一个周期为1秒钟的时钟脉冲,0.5秒为1,0.5秒为0; SM0.6:该位为扫描时钟脉冲,本次扫描为1,下次扫描为0; SM1.0:当执行某些指令,其结果为0时,将改位置1;SM1.1:当执行某些指令,其结果溢出或为非法数值时,将改位置1; SM1.2:当执行数学运算指令,其结果为负数时,将改位置1; SM1.3:试图除以0时,将改位置1;S7-200中SM0.0的用法:1、SM0.0在程序运行时始终为ON 。
2、SM0.0是一个无条件的常闭触点,用来启动无条件运行的指令。
只要上电,SM0.0必然是“1”。
因此程序中那些不受任何条件限制,必须要执行的指令就用它作为触发触点。
3、问:程序有时要在指令前加SM0.0,为什么不直接连在母线上,不是一样吗?最佳答案:因为,S7-200的指令是不能直接连在“母线”上的,这不符合语法要求。
SM0.0是不可控的触点,适用于无条件触发的场合,并非每个指令都需要SM0.0。
继电器的正确使用方法

继电器的正确使用方法继电器的正确使用方法创建时间:2014-05-271.继电器的简单介绍继电器是一种电控制器件,是当输入量(激励量)的变化达到规定要求时,在电气输出电路中使被控量发生预定的阶跃变化的一种电器。
它具有控制系统(又称输入回路)和被控制系统(又称输出回路)之间的互动关系。
通常应用于自动化的控制电路中,它实际上是用小电流去控制大电流运作的一种“自动开关”。
故在电路中起着自动调节、安全保护、转换电路等作用。
继电器前瞻产业研究院发布的《中国继电器行业产销需求与投资预测分析报告前瞻》显示,上述行业对继电器的用量是相当可观的,随着这些行业的发展,无疑会促进继电器市场的进一步扩大。
2010 年,继电器出口的数量虽然降低了,但出口值却增加了,表明出口继电器的附加值提高了。
目前,继电器行业的高附加值产品已有较大提高,在某些领域已在逐步取代进口产品。
2.继电器的主要作用继电器是具有隔离功能的自动开关元件,当输入回路中激励量的变化达到规定值时,能使输出回路中的被控电量发生预定阶跃变化的自动电路控制器件。
它具有能反应外界某种激励量(电或非电)的感应机构、对被控电路实现“通”、“断”控制的执行机构,以及能对激励量的大小完成比较、判断和转换功能的中间比较机构。
继电器广泛应用于遥控、遥测、通讯、自动控制、机电一体化及和航天技术等领域,起控制、保护、调节和传递信息的作用。
继电器一般都有能反映一定输入变量(如电流、电压、功率、阻抗、频率、温度、压力、速度、光等)的感应机构(输入部分);有能对被控电路实现“通”、“断”控制的执行机构(输出部分);在继电器的输入部分和输出部分之间,还有对输入量进行耦合隔离,功能处理和对输出部分进行驱动的中间机构(驱动部分)。
而作为控制元件,继电器有如下几种作用:(1)扩大控制范围:例如,多触点继电器控制信号达到某一定值时,可以按触点组的不同形式,同时换接、开断、接通多路电路。
(2)放大:例如,灵敏型继电器、中间继电器等,用一个很微小的控制量,可以控制很大功率的电路。
6-西门子S7-200系列PLC顺控继电器指令详解
电气控制与PLC
7
小车顺序控制步进梯形图
2018/10/12
操作数
CSCRE
CSCRE
CSCRE
无
SБайду номын сангаасRE
SCRE
SCRE
每个状态提供的功能:驱动处理、转移条件及相继状态。如状态S1.0,驱动接通输出 Q0.0,当转移条件I0.1接通后,工作状态从S1.0转移到相继状态S1.1,状态S1.0自动复位。 状态S具有的功能: 触点功能:驱动输出线圈或相继的状态 线圈功能:在转移条件下被驱动
2018/10/12
电气控制与PLC
2
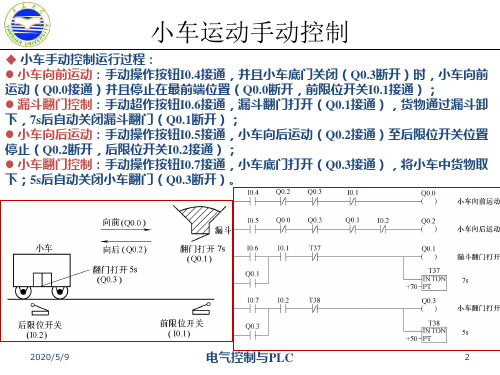
小车运动顺序控制
小车手动控制每一个运动过程都需要人为手动操作。为提高生产效率,要求在满足初 始条件时,小车能够按照工艺要求顺序地自动循环各个生产步骤。将小车的各个工作步 骤用工序表示,并依工作顺序将工序连接成顺序控制图,其特点是:
将复杂的任务或过程分解成若干个 工序。无论多复杂的顺序控制过程均 能分化成小的工序,有利于程序的结 构化设计。
PLC运行时,SM0.1脉冲信号驱动初始状态S0.0。 当启动按钮I0.0接通,小车处于后限位位臵I0.2=ON,小车 翻门关闭Q0.3=OFF,工作状态从S0.0转移到S1.0。 状态S1.0驱动后,输出Q0.0接通,小车向前运动,至前限 位I0.1=ON,工作状态从S1.0转移到S1.1。 状态S1.1驱动后,输出Q0.1接通,漏斗翻门打开,同时定 时器T37接通,7s后,定时器T37触点接通,工作状态从S1.1 转移到S1.2。 状态S1.2驱动后,输出Q0.2接通,小车向后运动,至后限 位I0.2=ON,工作状态从S1.2转移到S1.3。 状态S1.3驱动后,输出Q0.3接通,小车翻门打开,同时定 时器T38接通,5s后,定时器T38触点接通。此时,如果小车 运行工作方式处于单循环方式(I1.1接通),工作状态从S1.3 转移到S0.0,小车回到原初始状态,等待启动按钮重新按下, 开始第二次循环;如果小车运行工作方式处于自动循环方式 (I1.0接通),工作状态从S1.3转移到S1.0,小车重复S1.0~ S1.3的工作过程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S7-200特殊继电器用法
有些辅助继电器具有特殊功能或存储系统的状态变量、有关的控制参数和信息,我们称为特殊标志继电器。
用户可以通过特殊标志来沟通PLC与被控对象之间的信息,如可以读取程序运行过
程中的设备状态和运算结果信息,利用这些信息用程序实现一定的控制动作。
用户也可通过直接设置某些特殊标志继电器位来使设备实现某种功能。
特殊标志继电器用“SM”表示,特殊标志继电器区根据功能和性质不同具有位、字节、字和双字操作方式。
其中SMB0、SMB1为系统状态字,只能读取其中的状态数据,不能改写,可以位寻
址。
系统状态字中部分常用的标志位说明如下:
SM0.0:始终接通;
SM0.1:首次扫描为1,以后为0,常用来对程序进行初始化;
SM0.2:当机器执行数学运算的结果为负时,该位被置1;
SM0.3:开机后进入RUN方式,该位被置1一个扫描周期;
SM0.4:该位提供一个周期为1分钟的时钟脉冲,30秒为1,30秒为0;
SM0.5:该位提供一个周期为1秒钟的时钟脉冲,0.5秒为1,0.5秒为0;
SM0.6:该位为扫描时钟脉冲,本次扫描为1,下次扫描为0;
SM1.0:当执行某些指令,其结果为0时,将改位置1;
SM1.1:当执行某些指令,其结果溢出或为非法数值时,将改位置1;
SM1.2:当执行数学运算指令,其结果为负数时,将改位置1;
SM1.3:试图除以0时,将改位置1;
S7-200中SM0.0的用法:
1、SM0.0在程序运行时始终为ON。
2、SM0.0是一个无条件的常闭触点,用来启动无条件运行的指令。
只要上电,SM0.0必然是“1”。
因此程序中那些不受任何条件限制,必须要执行的指令就用它作为触发触点。
基本指令
关于状态字(SM)
01、SMB0包括8个状态位
(SM0.0/SM0.1/SM0.2/SM0.3/SM0.4/SM0.5/SM0.6/SM0.7)
02、SMB1 包含了各种潜在的错误提示,可在执行某些指令或执行出错时由系统自动对相应进行置位或复位.
03、SMB2 在自由接口通信时,自由接口接收字符的缓冲区.
04、SMB3 在自由接口通信时,发现接收到的字符中有奇偶效验错误时,可将SM3.0置位.
05、SMB4 标志中断队列是否溢出或通信接口使用状态.
06、SMB5 标志I/O系统错误.
07、SMB6 CPU模块识别(ID)寄存器.
08、SMB7 系统保留
09、SMB8-SMB21 I/O模块识别和错误寄存器,按字节对形式(相邻两个字节)存储扩展模块0-6的模块类型、I/O类型、I/O点数和测得的各模块I/O错误. 10、SMB22-SMB26 记录系统扫描时间.
11、SMB28-SMB29 存储CPU模块自带的模拟电位器所对应的数字量.
12、SMB30-SMB130 SMB30为自由接口通信时,自由接口0的通信方式控制字节;SMB130为自由接口通信时,自由接口1的通信方式控制字节;两字节可读可写。
13、SMB31-SMB32 永久存储器(EEPROM)写控制.
14、SMB34-SMB35 用于存储定时中断的时间间隔.
15、SMB36-SMB65 高速计数器HSC0、HSC1、HSC2的监视及控制寄存器.
16、SMB66-SMB85 高速脉冲输出(PTO/PWM)的监视及控制寄存器.
17、SMB86-SMB94 自由接口通信时,接口0或接口1接收信息状态寄存器.
18、SMB186-SMB194 自由接口通信时,接口0或接口1接收信息状态寄存器.
19、SMB98-SMB99 标志扩展模块总线错误号.
20、SMB131-SMB165 高速计数器HSC3、HSC4、HSC5的监视及控制寄存器.
21、SMB166-SMB194 高速脉冲输出(PTO)包络定义表.
22 SMB200-SMB299 预留给智能扩展模块,保存其状态信息.
S7-200中SM0.0的用法
1、SM0.0在程序运行时始终为ON。
2、SM0.0是一个无条件的常闭触点,用来启动无条件运行的指令。
只要上电,SM0.0必然是“1”。
因此程序中那些不受任何条件限制,必须要执行的指令就用它作为触发触点。
3、问:程序有时要在指令前加SM0.0,为什么不直接连在母线上,不是一样吗?
最佳答案:
因为,S7-200的指令是不能直接连在“母线”上的,这不符合语法要求。
SM0.0是不可控的触点,适用于无条件触发的场合,并非每个指令都需要SM0.0。
在其它场合,要用可控制的触点来触发指令,如I0.0、M0.0或各种比较指令等等。
如果没有可控触点可用,就只能用SM0.0。
其他答案:
a、S7200编程中有规定,在输出类指令前必须有触点指令,有的时候输出指令不需要条件直接输出为1,但为了满足这样的编程约定就串连常为1的sm0.0在前面。
b、不同PLC厂家都有自己语法规定,SIEMENS S7-200梯形图就这样要求的,不能母线直接连输出指令(或子程序调用)。
c、一个程序用不用SM0.0在于多方面的需要,如果你不需要也能完成控制要求那不用当然好了。
不过对于一些指令你还是非用它不可呢!另外在调试程序时它还是你的好帮手呢!。