直流激励时接触式霍尔位移传感器特性实验
实验四 霍尔式传感器的静态位移特性—直流激励

南昌大学实验报告学生姓名: 学 号: 专业班级: 实验类型:□ 验证 □ 综合 □ 设计 □ 创新 实验日期: 实验成绩:实验四 霍尔式传感器的静态位移特性—直流激励实验目的:了解霍尔式传感器的原理与特性。
所需单元及部件:霍尔片、磁路系统、电桥、差动放大器、V /F 表、直流稳压电源,测微头、振动平台。
有关旋钮的初始位置:差动放大器增益旋钮打到最小,电压表置2V 档,直流稳压电源置2V 档,主、副电源关闭。
实验步骤:(1)了解霍尔式传感器的结构及实验仪上的安装位置,熟悉实验面板上霍尔片的符号,霍尔片安装在实验仪的振动圃盘上,两个半圆永久磁钢固定在实验仪的顶板上,二者组合成霍尔式传感器。
(2)开启主、副电源将差动放大器调零后,增益置接近最小,使得霍尔片在磁场中位移时V /F 表读数明显变化,关闭主,副电源,根据图1接线,W 1、r 为电桥单元的直流电桥平衡网络。
(3)装好测微头,调节测微头与振动台吸合并使霍尔片置于半圆磁钢上下正中位置。
(4)开启主、副电源,调整W1使电压表指示为零。
(5)上下旋动测微头,记下电压表读数,建议每隔0.2mm 读一个数,将读数填入下表:图1 接线图做出V—X曲线,指出线性范围,求出灵敏度,关闭主、副电源。
可见,本实验测出的实际上是磁场情况,它的线性越好,位移测量的线性度也越好,它的变化越陡,位移测量的灵敏度也越大。
(6)实验完毕,关闭主、副电源,各旋钮置初始位置。
注意事项:(1)由于磁路系统的气隙较大,应使霍尔片尽量靠近极靴,以提高灵敏度。
(2)一旦调整好后,测量过程中不能移动磁路系统。
(3)激励电压不能过大,以免损坏霍尔片。
(±4V就有可能损坏霍尔片)。
霍尔位移传感器直流激励特性研究

霍尔位移传感器直流激励特性研究【摘要】本试验通过设计电路研究直流激励时霍尔位移传感器位移与电压值函数关系。
【关键词】霍尔位移传感器直流激励引言:利用传感器测试微小位移量有多种方法,本试验利用霍尔元件设计放大电路研究直流激励时霍尔式位移传感器其位移量与输出电压的定量关系,相比于同类实验其优点是电路设计简单,准确度较高,电路元器件价格较低。
1.试验原理根据霍尔效应,霍尔电势UH=KHIB,保持KH、I不变,若霍尔元件在梯度磁场B中运动,且B是线性均匀变化的,则霍尔电势UH也将线性均匀变化,而UH正比于位移量X,这样就可以利用UH的变化进行位移量X的测量。
设计实现以上原理的试验电路如下试验电路主要由主机箱(稳压电源、电压表)、传感器试验台(霍尔式位移传感器、振动盘、测微杆)、应变/平衡网络/温度模块、仪表放大器模块等组成。
2.试验数据3.试验结论将实验数据进行线性拟合其通过拟合出来的直线关系为U= 2.5025X + 0.0213.3.1 计算其灵敏度S [2]:灵敏度定义为测量元件的输出u相对于其输入x的变化率,故而全桥电路中金属箔应变片的灵敏度为:S=du/dx ,而由绘制的曲线可知S= 2.5025,近似为一个常数。
霍尔式位移传感器位移量与输出电压的特性曲线图3.2 计算其非线性误差δ[3]:由上面计算可得U=SX,U= 2.5025X+0.0213≈2.5*X 于是计算可得:U(0)=0V,U(1.0)=2.5V,U(2.0)=5.0V,U(3.0)=7.5V,U(4.0)=10.0V由此可得在各处的非线性误差为:E(0)=0.000V,E(1.0)=-0.01V,E(2.0)=0.01V,E(3.0)=0.06V,E(4.0)=0.03V由上面的非线性误差计算可以得出如下结论:在越远离平衡点(0.0mm)处的非线性误差越大,测量结果的非线性越明显,测量结果也就越不准确。
参考文献[1] 刘迎春,叶湘滨.现代新型传感器原理与应用.北京:1998年1月版;15-23.[2] 袁长坤.物理量测量.北京:2004年1月第一版;59-65和213-215.[3] 陈世涛.大学物理实验教程.四川:2011年2月第一版;4-19.。
(整理)实验四 霍尔式传感器的静态位移特性—直流激励.

南昌大学实验报告学生姓名: 学 号: 专业班级: 实验类型:□ 验证 □ 综合 □ 设计 □ 创新 实验日期: 实验成绩:实验四 霍尔式传感器的静态位移特性—直流激励实验目的:了解霍尔式传感器的原理与特性。
所需单元及部件:霍尔片、磁路系统、电桥、差动放大器、V /F 表、直流稳压电源,测微头、振动平台。
有关旋钮的初始位置:差动放大器增益旋钮打到最小,电压表置2V 档,直流稳压电源置2V 档,主、副电源关闭。
实验步骤:(1)了解霍尔式传感器的结构及实验仪上的安装位置,熟悉实验面板上霍尔片的符号,霍尔片安装在实验仪的振动圃盘上,两个半圆永久磁钢固定在实验仪的顶板上,二者组合成霍尔式传感器。
(2)开启主、副电源将差动放大器调零后,增益置接近最小,使得霍尔片在磁场中位移时V /F 表读数明显变化,关闭主,副电源,根据图1接线,W 1、r 为电桥单元的直流电桥平衡网络。
(3)装好测微头,调节测微头与振动台吸合并使霍尔片置于半圆磁钢上下正中位置。
(4)开启主、副电源,调整W1使电压表指示为零。
图1 接线图(5)上下旋动测微头,记下电压表读数,建议每隔0.2mm读一个数,将读数填入下表:做出V—X曲线,指出线性范围,求出灵敏度,关闭主、副电源。
可见,本实验测出的实际上是磁场情况,它的线性越好,位移测量的线性度也越好,它的变化越陡,位移测量的灵敏度也越大。
(6)实验完毕,关闭主、副电源,各旋钮置初始位置。
注意事项:(1)由于磁路系统的气隙较大,应使霍尔片尽量靠近极靴,以提高灵敏度。
(2)一旦调整好后,测量过程中不能移动磁路系统。
(3)激励电压不能过大,以免损坏霍尔片。
(±4V就有可能损坏霍尔片)。
直流激励时霍尔式传感器的位移特性试验

3
实验实训要求
■必修□选修□其他
实验实训指导教师
朱良学
考核方法
实验数据的正确记录及实训报告
项目建立时间
2014年9月
实验实训教材或指导书
■有□无
教材或指导书名称及版本
传感器实训指导书
实验实训内容
简介
(目的、要求、
内容)
训练目的:
掌握霍尔式传感器测量位移的原理和方法
场地要求及安全要求:
1.保持干净干燥
酒泉职业技术学院实验实训项目卡
系(部)机电工程系实验实训室传感器技术实训室指导教师:朱良学№.6
实验实训项目名称
直流激励时霍尔式传感器的位移特性试验
性
质
□基础课
□专业基础课
■专业课
类
别
■验证性
□设计性
□综合性
实验(实训)时数
2
所属课程
信息检测与控制
同时实验(实训)组数
8
面向专业
电气自动化;电子信息;应用电子
2.正确接线
3.安全用电
教学组织及内容:
1.将霍尔传感器安装固定在静态支架上,并固定好测微头。
2.完成霍尔传感器以及实验模块的接线。
3.实验模块接入模块电源15V(从主控箱引入),检查无误后,开启电源,调节测微头使霍尔片在磁钢中间位置,再调节Rw1使电压表指示为零,若无法调零则交换放大器两端输入接线。
4.旋转测微头向轴向方向推进,每转动0.2mm记下一个读数,直到读数近似不变,将读数填入表。
主要实验
实训设备
名称
型号规格
数量
名称
型号规格
数量
霍尔传感器实验模块
8
测微头
实验十二霍尔式传感器的应用(一)直流激励特性测试一、实验目的...
实验十二霍尔式传感器的应用(一)直流激励特性测试一、实验目的了解霍尔式传感器的结构、工作原理,学会用霍尔传感器做静态位移测试。
二、实验原理霍尔式传感器是由两个环形磁钢组成梯度磁场和位于梯度磁场中的霍尔元件组成。
当霍尔元件通以恒定电流时,霍尔元件就有电势输出。
霍尔元件在梯度磁场中上、下移动时,输出的霍尔电势V取决于其在磁场中的位移量X,所以测得霍尔电势的大小便可获知霍尔元件的静位移。
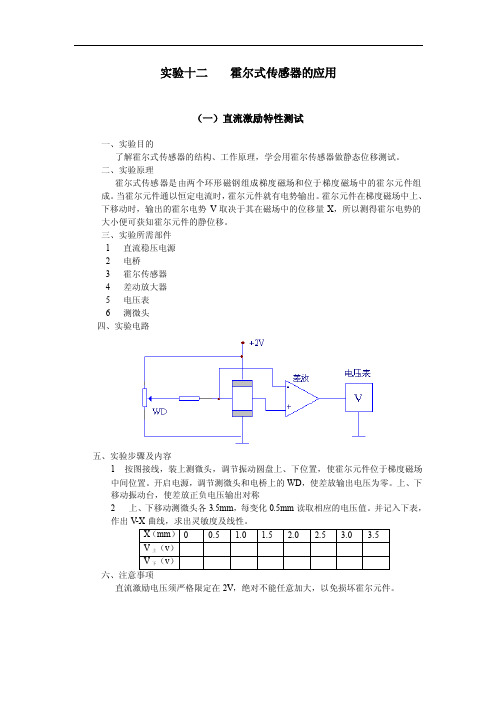
三、实验所需部件1直流稳压电源2电桥3霍尔传感器4差动放大器5电压表6测微头四、实验电路五、实验步骤及内容1 按图接线,装上测微头,调节振动圆盘上、下位置,使霍尔元件位于梯度磁场中间位置。
开启电源,调节测微头和电桥上的WD,使差放输出电压为零。
上、下移动振动台,使差放正负电压输出对称2 上、下移动测微头各3.5mm,每变化0.5mm读取相应的电压值。
并记入下表,作出V-X曲线,求出灵敏度及线性。
六、注意事项直流激励电压须严格限定在2V,绝对不能任意加大,以免损坏霍尔元件。
(二)霍尔传感器的应用——振幅测量和电子秤一、实验目的1 通过本实验了解霍尔传感器在振动测量中的作用。
2 说明线性霍尔传感器的实际应用。
二、实验所需部件1霍尔传感器2电桥3差动放大器4低通滤波器5直流稳压电源6示波器7电压表8砝码9振动圆盘三、实验步骤及内容(一)振幅测量1按上面的实验二十所示的电路连线,调节系统,使其输出为零。
2将低频振荡器接“激振I”,保持适当的振幅,用示波器观察差动放大器输出波形。
3进一步提高低频振荡器的振幅,用示波器观察差放输出波形,当波形出现顶部削顶时,说明霍尔元件已进入均匀磁场,霍尔电压已不再随振动的增加而线性增加。
(二)电子秤1 在上面电路不变的基础上,调节系统使输出电压为零,系统灵敏度尽量大。
2 以振动圆盘作为称重平台,逐步放上砝码,依次记下表头读数,填入下表,并做出V-W曲线。
线中求得其重量。
四、注意事项1 霍尔传感器在做称重时只能工作在梯度磁场中,所以砝码和被称重物都不应太重。
实验三 霍尔传感器实验

实验三磁敏传感器实验一、霍尔式传感器的直流激励特性实验目的:了解霍尔式传感器的原理与特性。
实验原理:霍尔式传感器是由两个环形磁钢组成梯度磁场和位于梯度磁场中的霍尔元件组成。
当霍尔元件通过恒定电流时,霍尔元件在梯度磁场中上、下移动时,输出的霍尔电势V取决于其在磁场中的位移量X,所以测得霍尔电势的大小便可获知霍尔元件的静位移。
所需单元及部件:霍尔片、磁路系统、电桥、差动放大器、F/V表、直流稳压电源、测微头、振动平台、主、副电源。
有关旋钮初始位置:差动放大器增益旋钮打到最小,电压表置20V档,直流稳压电源置2V档,主、副电源关闭。
实验步骤:(1)了解霍尔式传感器的结构及实验仪上的安装位置,熟悉实验面板上霍尔片的符号。
霍尔片安装在实验仪的振动圆盘上,两个半圆永久磁钢固定在实验仪的顶板上,二者组合成霍尔传感器。
(2)开启主、副电源将差动放大器调零后,增益最小,关闭主电源,根据图3-1接线,W1、r为电桥单元的直流电桥平衡网络。
图3-1(3)装好测微头,调节测微头与振动台吸合并使霍尔片置于半圆磁钢上下正中位置。
(4)开启主、副电源,调整W1使电压表指示为零。
作出V-X曲线指出线性范围,求出灵敏度,关闭主、副电源。
可见,本实验测出的实际上是磁场情况,磁场分布为梯度磁场与磁场分布有很大差异,位移测量的线性度,灵敏度与磁场分布有很大关系。
(6)实验完结关闭主、副电源,各旋钮置初始位置。
注意事项:(1)由于磁路系统的气隙较大,应使霍尔片尽量靠近极靴,以提高灵敏度。
(2)一旦调整好后,测量过程中不能移动磁路系统。
(3)激励电玉不能过2v,以免损坏霍尔片。
二、霍尔式传感器的应用一电子秤实验目的:了解霍尔式传感器在静态测量中的应用。
所需单元及部件:霍尔片、磁路系统、差动放大器、直流稳压电源、电桥、砝码、F/V表(电压表)、主、副电源、振动平台。
有关旋钮初始位置:直流稳压电源置±2V档,F/V表置2V档,主、副电源关闭。
直流激励霍尔传感器实验报告

9.5 0.113079
ΔLmax
yFS
δL
10.5 -0.134341 11 -0.099551 11.5 0.045239 12 0.04281 12.5 -0.005335 13 -0.03348 13.5 -0.021625 14 0.00023 14.5 0.042085
1.8 11.5
44.3 7.2
61.9 5.1
62.2 3.9
61.1 2.5
59.3 1.8
54.8 1.3
X/mm
5
5.5
6
6.5
7
7.5
8
8.5
V/mv
正行程 反行程
38.4 0.3
25.3 0.1
-2.1 -3.2
-54.8 -134.2 -60 -140
-247 -260
-412 -470
-0.22008 3.5722 -6.161%
0.5 -0.029736 1 -0.028031
1.5 -0.024126 2 -0.019321
2.5 -0.014716 3 -0.009411
3.5 -0.003906 4 0.001299
4.5 0.007204 最大偏差
满量程输出 非线性误差
=
������‘(������)
由公式可看出它就是输出—输入特性曲线的斜率,在这里用理论拟合直线的
斜率代替,因此可得到三个灵敏度
k1=12.01mv/mm
k2=789.58 mv/mm
5、迟滞误差
k3=83.71 mv/mm
迟滞指正反行程中输出—输入特性曲线的不重合程度,用最大输出差值
实验7 霍尔式传感器的特性-直流激励

电子信息工程系实验报告课程名称:传感与检测实验项目名称:实验7 霍尔式传感器的特性-直流激励 实验时间:2012-6-11班级:电信092 姓名:XXX 学号:910706201实 验 目 的:了解霍尔式传感器的原理与特性。
实 验 环 境:霍尔片、磁路系统、电桥、差动放大器、F/V 表、直流稳压电源、测微头、振动平台、主、副电源。
实 验 原 理:霍尔式传感器是由两个环形磁钢组成梯度磁场和位于梯度磁场中的霍尔元件组成。
当霍尔元件通过恒定电流时,霍尔元件在梯度磁场中上、下移动时,输出的霍尔电势V 取决于其在磁场中的位移量X ,所以测得霍尔电势的大小便可获知霍尔元件的静位移。
有关旋钮初始位置:差动放大器增益旋钮打到最小,电压表置20V 档,直流稳压电源置2V 档,主、副电源关闭。
实 验 步 骤 及 结 果:(1)了解霍尔式传感器的结构及实验仪上的安装位置,熟悉实验面板上霍尔片的符号。
霍尔片安装在实验仪的振动圆盘上,两个半圆永久磁钢固定在实验仪的顶板上,二者组合成霍尔传感器。
(2)开启主、副电源将差动放大器调零后,增益最小,关闭主电源,根据图接线,W1、r 为电桥单元的直流电桥平衡网络。
(3)装好测微头,调节测微头与振动台吸合并使霍尔片置于半圆磁钢上下正中位置。
(4)开启主、副电源,调整W1使电压表指示为零。
(5)上下旋动测微头,记下电压表的读数,建议每0.2mm 读一个数,将读数填入下表: X(mm) 0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 V(mV) -1.592 -1.428 -1.266 -1.093 -0.939 -0.776 -0.617 -0.467 -0.306 -0.163 -0.001 X(mm) 2.2 2.4 2.6 2.8 3.0 3.2 3.4 3.6 3.8 4.0 V(mV)0.1530.3010.4710.6240.7910.9531.1211.3031.4751.665使用Matlab 软件,根据表格中V 与X 间的关系,作出V —X 曲线指出线性范围,求出灵敏度,关闭主、副电源。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验三直流激励时接触式霍尔位移传感器特性实验一、实验目的
了解霍尔位移传感器原理与应用。
二、基本原理
根据霍尔效应,霍尔电势U H=K H IB,保持K H、I不变,若霍尔元件在梯度磁场B中运动,且B是线性均匀变化的,则霍尔电势U H也将线性均匀变化,这样就可以进行位移测量。
三、需用器件与单元
霍尔传感器实验模板、线性霍尔位移传感器、直流电源±4V、电源±15V、测微头、数显单元。
四、实验步骤
1、将霍尔传感器按图8-1 安装。
霍尔传感器与实验模板的连接按图8-2进行。
①、
③为电源±4V(或单元5V),②、④为输出,R1与④之间可暂时不接。
图8-1 霍尔传感器安装示意图
2、开启电源,接入±15V电源,将微测头旋至10mm处,左右移动微测头使霍尔片处在磁钢中间位置,即数显表电压指示最小,拧紧测量架顶部的固定螺钉,接入R1与④之间的连线,调节Rw2使数显表指示为零(数显表置2V档)。
图8-2 霍尔传感器与实验模板连线图
3、旋转微测头,每转动0.5mm记下数字电压表读数,并将读数填入表8-1中,将测
微头回到10mm处,反向旋转测微头,重复实验过程,填入表8-1中。
五、实验结果分析与处理
1、记录数显表数值如下:
表3-1:霍尔传感器位移量与输出电压的关系:
X(mm)7.07.58.079.09.510.010.511.011.512.012.513.0 V(mV)1721361067953270-28-59-92-124-151-165
2、由数据绘出霍尔传感器位移量与输出电压特性曲线如下
图8-3 霍尔传感器位移量与输出电压特性曲线 3、(1)计算系统灵敏度:
在)10,0.7[∈X 区间,
ΔV=(172-136)+(136-106)+•••+(27-0)/6=172/6=28.67mV
ΔX=0.5mm
灵敏度S=ΔV/ΔX=57.34mV/mm
在]0.13,0.10(∈X 区间,
ΔV=(28-0)+(59-28)+。
+(165-151)/6=/6=27.5mV
ΔX=0.5mm
灵敏度S=ΔV/ΔX=55.0mV/mm
(2)计算非线性误差:
在)10,0.7[∈X 区间,
Δm =(172+136+106+79+53+27+0)/7=81.86mV
y FS =172mV
非线性误差δf =Δm / yFS ×100%=47.59%
在]0.13,0.10(∈X 区间,
Δm =(0+28+59+92+124+151+165)/7=88.43mV
y FS =165mV
非线性误差δf =Δm / yFS ×100%=53.59%
六、思考题
本实验中霍尔元件位移的线性度实际上反映的是什么量的变化?
答:当X 变化时,实际上变化的是梯度磁场B ,所以霍尔元件位移的线性度实际上反映的是磁场梯度B 在空间上的变化。