基于单片机的自整角机转角测量研究
利用8098单片机的角位移检测系统

利用8098单片机的角位移检测系统
李杰;戴文瑞
【期刊名称】《仪表技术与传感器》
【年(卷),期】1995(000)002
【摘要】本文介绍一种以8088单片机为核心,以自整角机为检测元件的角位移检测系统。
利用sinθ和cosθ的互补关系,合理的硬件设计和卡尔曼滤波器等软件处理,从而获得高精度的角位移检测系统。
实践证明这种检测方法具有精度高、反应快、检测信号稳定等特点。
【总页数】4页(P31-34)
【作者】李杰;戴文瑞
【作者单位】燕山大学计算机系,河北省秦皇岛市066004;燕山大学计算机系,河北省秦皇岛市066004
【正文语种】中文
【中图分类】TP216
【相关文献】
1.基于传感器的角位移检测系统设计与实现 [J], 张世海;韩泽伟;孙昕;韩云东
2.线阵CCD小幅角位移实时检测系统 [J], 李高勇;孙志宏
3.线阵CCD小幅角位移实时检测系统 [J], 李高勇;孙志宏
4.基于对比检测法的角位移传感器检测系统 [J], 李鹭翔; 朱维斌; 黄垚; 薛梓; 叶树亮
5.利用自整角机的一种新型高精度角位移检测系统 [J], 李惠光;慈春令;侯培国
因版权原因,仅展示原文概要,查看原文内容请购买。
自整角机轴角测量模块的设计

( eat n fC nrl n ier g A it nU ies yo i F re C a gh n 10 2 , hn ) D pr me t o t gnei , vai nv ri f r o c , h n c u 30 2 C ia o oE n o t A
Ke y wor ds: RS 32 it ra e;sn l— h p c mpue ;a i— n l e s rng mo u e;s n hr ie 2 n ef c i ge c i o tr x sa ge m a u i dl y c onz r
0 引 言
个定子绕 组就会产
Ab t a t s r c :T e s n h o ie S o e s d fr t e me s r me t o x sa ge b c u e o t i l sr c u e h y c r nz r i f n u e h a u e n f a i— n l e a s f i smp e t t r , t o s u r l b l y a d h g rc s n T e mo u e u e o me s r h x sa ge o y c r nz r n w s c mp e n ei i t n ih p e ii . h d l s d t a u e t e a i—n l f s n h o ie o i o lx a d a i o i c n e i n o s n x e sv . meh d i i t d c d t e ea i— n l t a es n h o ie se ct d b n o v n e tfru ea d e p n ie A t o s nr u e g t h s a ge h t h y c r nz ri x i y o o t x t e
基于单片机的步进电机转角定位控制系统

基于单片机的步进电机转角定位控制系统步进电机在现阶段的工业生产实践中发挥着重要的作用,明确步进电机在生产实践中的价值,了解其使用的标准程序,这于步进电机的合理应用有显著的效果。
针对步进电机的应用实践做分析可知其转角定位控制系统的作用发挥效果和自身的价值表达有显著的关系,所以在诸多应用中,需要基于生产实践对自身的转角定位控制系统做优化和调整。
在系统优化和调整的过程中,单片机的利用会让系统优化效果更佳,因此在单片机的应用根底上讨论研究步进电机转角定位控制系统,这可以为系统设计优化和建设实施提供更有效的参考与帮助,以下是基于单片机的控制系统分析。
一、转角控制硬件电路设计〔一〕转角控制工作原理基于单片机的具体利用对步进电机的转角定位控制系统做详细的分析可知其根本控制原理为:单片机的定时器中断可以产生驱动步进电机的驱动信号,该信号利用可以使步进电机出现角位移。
分析步进电机的现实利用,角度编码器会与其转轴连接,所以当步进电机处在不同位置的时候,其可以产生与角度具有对应性的电压输出。
电压信号被送入到单片机之后,单片时机利用自带的A/D转换功能实现模拟电压量的数字化。
利用大量的实验测试分析角度值与转化后的数字量对应关系,然后基于MATLAB软件做角度和A/D转换后数字量之间的函数关系拟合。
基于拟合的函数关系对单片机然间程序当中的驱动脉冲信号等进行修正控制,这样可以实现精准的角度控制。
总而言之,对转角控制工作的原理做详细的分析,了解控制工作实施的具体过程和细节,这对于控制系统的设计优化有重要的意义。
〔二〕电路设计在步进电机转角定位控制系统的具体应用中,要保证应用效果,需要有稳定的可利用电路,所以做好电路的设计也非常的必要。
基于实践分析可知在硬件电路的具体设计中,以下内容要重点强调。
第一是角度输入电路的预设。
此电路设计主要实现的手段为按键控制。
在设计实践中,可以基于单片机的端口线构建键盘,然后配置按键,之后利用按键进行期望的旋转角度值输入并对系统进行操控。
高精度自整角机轴_角测量系统设计

理, 即得:
44卷
F1 = 1 / 2 Vm2 s in
F2 = 1 / 2 Vm2 cos
( 5)
由滤波器输出值 ( 5) 可知, 通 过直角坐标 - 极
坐标转换即可计算出所求的轴 /角测量信号 。设计 中我们可通过预先计算 arctan , 即可通过查找表的 方式求旋转角度。由于所求的旋转角 值取值范围
析。本设计重点研究了轴 /角测量的一种全数字信号处理 方法, 在 FPGA 器 件上实现了 系统的时序 控制、数字 混频、
F IR 滤波器和轴 /角转换等模块的数字电路设计, 保证了系统的抗干扰性和可靠性。设计仿真与分 析结果表明, 采用
14位数字输出可获得 1 3 的轴 /角测量精度, 满足了自整角机轴 /角测量的高精度设计要求。
轴角信号的数字化, 系统组成如图 1所示。
自整角机相对于轴线旋转 角时, 形成一组自
整角信号, 经过数字转换器可解算出数字化角度 :
V1 = Vm sin t sin
V2 = Vm sin t sin( - 120 )
( 1)
V3 = Vm sin t sin( - 240 )
收稿日期: 2010 07 13 基金项 目: 安 徽 省 教 育 厅 自 然 科 学 重 点 科 研 计 划 项 目 资 助 ( 2009A JZR0606 ) , 合 肥 工 业 大 学 青 年 发 展 基 金 项 目
0C 78
2 04 7
106 0
183 0
1 55 2
0C 78
000 0
0
106 0
144 8
1 77 1
0C 78
0C 78
2 04 7
183 0
106 0
基于自整角机数字转换器SDC1742的轴角检测电路设计
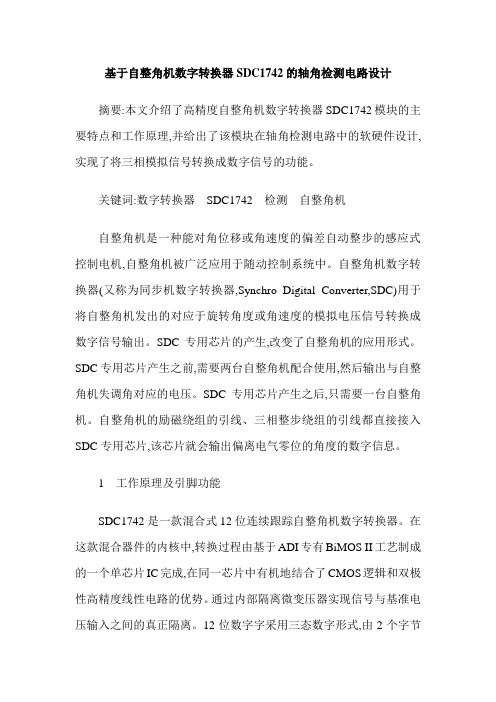
基于自整角机数字转换器SDC1742的轴角检测电路设计摘要:本文介绍了高精度自整角机数字转换器SDC1742模块的主要特点和工作原理,并给出了该模块在轴角检测电路中的软硬件设计,实现了将三相模拟信号转换成数字信号的功能。
关键词:数字转换器SDC1742 检测自整角机自整角机是一种能对角位移或角速度的偏差自动整步的感应式控制电机,自整角机被广泛应用于随动控制系统中。
自整角机数字转换器(又称为同步机数字转换器,Synchro Digital Converter,SDC)用于将自整角机发出的对应于旋转角度或角速度的模拟电压信号转换成数字信号输出。
SDC专用芯片的产生,改变了自整角机的应用形式。
SDC专用芯片产生之前,需要两台自整角机配合使用,然后输出与自整角机失调角对应的电压。
SDC专用芯片产生之后,只需要一台自整角机。
自整角机的励磁绕组的引线、三相整步绕组的引线都直接接入SDC专用芯片,该芯片就会输出偏离电气零位的角度的数字信息。
1 工作原理及引脚功能SDC1742是一款混合式12位连续跟踪自整角机数字转换器。
在这款混合器件的内核中,转换过程由基于ADI专有BiMOS II工艺制成的一个单芯片IC完成,在同一芯片中有机地结合了CMOS逻辑和双极性高精度线性电路的优势。
通过内部隔离微变压器实现信号与基准电压输入之间的真正隔离。
12位数字字采用三态数字形式,由2个字节构成。
通过最高有效8位和最低有效4位分别配置ENABLE输入,不但简化了将一个器件以多路复用方式连接至单个数据总线的过程,同时为INHIBIT输入提供了支持,无需中断跟踪环路的操作。
上电后,SDC1742芯片内部模块处于工作状态,接收自整角机励磁绕组和整步绕组的交流信号输入,在芯片内部转变成为正弦信号和余弦信号,输入数字转换器进行转换后送入输出锁存器,进而送到输出引脚。
模块并行输出的12位数码随着自整角机轴的旋转而发生变化。
在数字转换完成后,BUSY端送出低电平,表示SDC输出的数字码有效,允许单片机或DSP等器件将数字码取走。
基于AVR单片机的角度测量系统研究
基于AVR单片机的角度测量系统研究摘要:随着科学技术的进步,特别是以传感器技术、通信技术和计算机技术为基础的现代信息技术的发展,数据采集技术的发展也是日新月异。
各类设备的自动化、智能化程度越来越高,人力逐渐得到解放,效率得到了提高。
我们所研究的角度测量系统属于数据采集系统,其目的是迅速稳定的得到我们想要的角度值,从而完成其他控制。
本文主要对其硬件部分进行了一点研究。
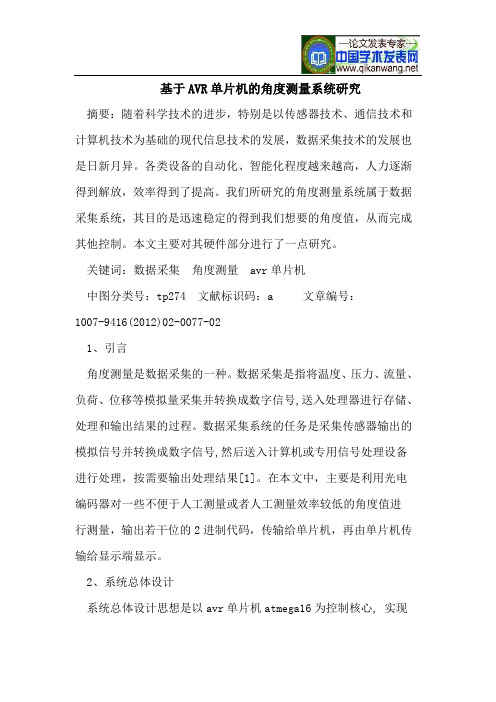
关键词:数据采集角度测量 avr单片机中图分类号:tp274 文献标识码:a 文章编号:1007-9416(2012)02-0077-021、引言角度测量是数据采集的一种。
数据采集是指将温度、压力、流量、负荷、位移等模拟量采集并转换成数字信号,送入处理器进行存储、处理和输出结果的过程。
数据采集系统的任务是采集传感器输出的模拟信号并转换成数字信号,然后送入计算机或专用信号处理设备进行处理,按需要输出处理结果[1]。
在本文中,主要是利用光电编码器对一些不便于人工测量或者人工测量效率较低的角度值进行测量,输出若干位的2进制代码,传输给单片机,再由单片机传输给显示端显示。
2、系统总体设计系统总体设计思想是以avr单片机atmega16为控制核心, 实现数据的存储、传输和显示。
根据系统所需完成的功能,包括数据的采集、处理、传输、显示以及数据通信、键盘/显示等。
所设计的系统总体结构如下图所示。
3、系统硬件设计3.1 光电编码器光电编码器又称光电角位置传感器,是一种集光、机、电为一体的数字式角度、速度传感器,它采用光电技术将轴角信息转换成数字信号,与计算机和显示装置连接后可实现动态测量和实时控制[2]。
这是目前应用最多的一种传感器,由光栅盘和光电检测装置组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
基于AVR单片机的角度测量系统研究
基于AVR单片机的角度测量系统研究角度测量在现代工业和科技中是非常重要的,而基于AVR单片机的角度测量系统是一种常见的解决方案。
该系统涉及了一些硬件和软件技术的应用,下面将对其进行详细介绍。
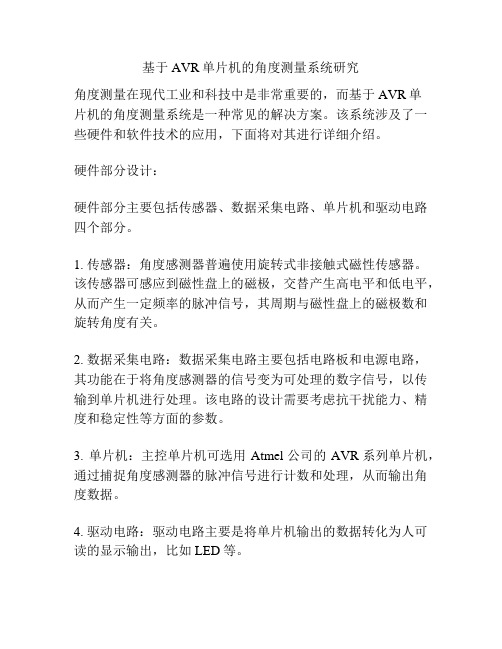
硬件部分设计:硬件部分主要包括传感器、数据采集电路、单片机和驱动电路四个部分。
1. 传感器:角度感测器普遍使用旋转式非接触式磁性传感器。
该传感器可感应到磁性盘上的磁极,交替产生高电平和低电平,从而产生一定频率的脉冲信号,其周期与磁性盘上的磁极数和旋转角度有关。
2. 数据采集电路:数据采集电路主要包括电路板和电源电路,其功能在于将角度感测器的信号变为可处理的数字信号,以传输到单片机进行处理。
该电路的设计需要考虑抗干扰能力、精度和稳定性等方面的参数。
3. 单片机:主控单片机可选用Atmel公司的AVR系列单片机,通过捕捉角度感测器的脉冲信号进行计数和处理,从而输出角度数据。
4. 驱动电路:驱动电路主要是将单片机输出的数据转化为人可读的显示输出,比如LED等。
软件部分设计:AVR单片机上的角度测量系统的软件部分包括中断程序、计算程序和数据显示程序。
1. 中断程序:中断程序用于捕捉角度感测器传来的脉冲信号,记录下来该信号每次出现的时间,并进行中断处理。
这些中断脉冲的数量,即可以通过所控件60Hz的脉冲进行校准,计算得到旋转角度。
2. 计算程序:计算程序用于将捕捉到的中断信号计算成角度。
通过使用公式θ= n×360 / T ,其中n代表脉冲个数,T代表相邻两个中断时间的时间差,计算得到角度数据。
3. 数据显示程序:数据显示程序主要用于将已经计算好的角度数据存放在单片机的内存中,并在驱动电路的帮助下显示出来。
总结:基于AVR单片机的角度测量系统是一种应用非常广泛的解决方案,主要应用于工业,医疗和军事领域,能够实现精确的角度测量。
其硬件设计固然重要,但软件部分的设计也是至关重要的。
了解其整体工作原理,可以帮助让我们更好地理解其在实际应用中的使用和维护方式,也有助于我们有能力进行该系统的进一步升级和优化,以满足不同场景中的需求。
(完整word版)单片机实现舵机转角控制

舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。
一般舵机的控制要求如图1所示。
图1 舵机的控制要求单片机实现舵机转角控制可以使用FPGA、模拟电路、单片机来产生舵机的控制信号,但FPGA成本高且电路复杂。
对于脉宽调制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要50Hz(周期是20ms)的信号,这对运放器件的选择有较高要求,从电路体积和功耗考虑也不易采用。
5mV以上的控制电压的变化就会引起舵机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于5mV,所以滤波电路的精度难以达到舵机的控制精度要求。
也可以用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。
单片机完成控制算法,再将计算结果转化为PWM信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠。
单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的PWM 周期信号,本设计是产生20ms的周期信号;其次是脉宽的调整,即单片机模拟PWM信号的输出,并且调整占空比。
当系统中只需要实现一个舵机的控制,采用的控制方式是改变单片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时中断。
这样既节省了硬件电路,也减少了软件开销,控制系统工作效率和控制精度都很高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的自整角机转角测量研究
李友毅1, 2, 3 , 李小奇3 , 雷文生3 , 童彭年3
(1. 中国科学院长春光学精密机械与物理研究所,吉林长春130033;
2. 中国科学院研究生院,北京100039;
3. 空军航空大学军事仿真技术研究所,吉林长春130022)
摘要: 介绍了一种基于单片机的自整角机转角测量方法,该方法省略了自整角机/数字转换器( SDC)和
交流激磁电源,直接利用单片机进行激磁和采样来确定自整角机的转角,不仅硬件系统组成简单、满足测
量精度,降低系统开发成本,而且,提高了系统的可靠性。
本方法已经应用到航空仪表伺服控制系统中。
关键词: 自整角机; 单片机; 自整角机/数字转换器; 转角测量
中图分类号: TM932 文献标识码: A 文章编号: 1000 - 9787 (2006) 03 - 0015 - 03
Research on measur ing rotation angle of synchro based on
single chip processor
L I You2yi1, 2, 3 , L IXiao2qi3 , LE IWen2sheng3 , TONG Peng2nian3
( 1. Changchun In stitute of Optics FineMechan ics and Physics, Ch inese Academy of Sc iences,
Changchun 130033, Ch ina;
2. Gradua te School, Ch inese Academy of Sc iences, Be ijing 100039, Ch ina;
3. In stitute ofM ilitary S imula tion Technology, Av ia tion Un iversity of A ir Force, Changchun 130022, Ch ina)
Abstract: A new method of measuring rotation angle of synchro is introduced, which is based on single chip
p rocessor. This method elides the synchro /digital converter ( SDC) and AC power supp ly. It only utilizes single
microchip directly to realize the function of measuring angle. The circuit is very simp le in structure and it can
satisfy the accuracy ofmeasuring rotation angle, so it can not only decrease the cost of the entire system, but also
increase the reliability of the system. At p resent, the method has been used in the serve2control of the flight
instruments.
Key words: synchro; single chip p rocessor; synchro /digital converter ( SDC) ; measuring rotation angle
0 引言
自整角机是一种感应式机电元件,它广泛应用在飞行
器姿态控制、导弹控制、雷达天线跟踪、智能仪表等角位置
控制系统中,以完成角位移的检测、传输、接收和变换等功
能。
当自整角机作为角度传感器使用时,它的输出端输出
与所测转角成一定函数关系的交流电压。
近年来,在工业
机器人、数控机床、计算机辅助制造(CAM)等方面,此类控
制电机也得到了广泛应用。
为适应测量、伺服系统数字化
的要求,需要把自整角机的模拟输出信号转变为数字信号再进行处理。
当前,比较通用的方法是在自整角机与计算机之间采用数字角度转换芯片,将自整角机的模拟输出信号直接转换为数字角度。
采用数字转换芯片的电路相对复杂,而且,数字芯片均为国外制造,价格不菲。
本文将在分析现在通用的自整角机转角信号转换方法的基础上,提出收稿日期: 2005 - 11 - 01
一种新的自整角机转角测量方法。
该方法利用单片机直接对自整角机进行激磁和采样,采样信号经过软件算法处理可以实现数字角测量的目的,测量分辨力能达到0. 1°。
该方法仅用2个电阻器和单片机即可实现,省略交流激磁电源、解调器和A /D变换器等中间器件,极大地简化了系统电路组成,降低了开发成本,而且,提高系统的可靠性。
目前,此方法已经成功应用到航空仪表驱动过程中。
1 自整角机测角原理[ 1]
在______控制系统中。