机械原理复习2
机械原理复习题第2章机构的结构分析
4
ω1 1
5 3
2
2
题9图
• • • •
解: F=3n-(2pL+pH)=3×4-2×6=0 或F=3n-(2pL+pH-p')-F′ =3×4-(2×7+0-2)-0=0 此方案有结构组成原理的错误。因为它 的自由度为零,不能运动。 • 修改方案如答图a、b所示。
• 例题2 图示为毛纺设备洗毛机中所采用的双 重偏心轮机构,偏心轮1可以在偏心轮2中相 对转动,偏心轮2可以在构件3的圆环中相对 转动。⑴试绘制其在图示位置时的机构运动 简图;⑵当以偏心盘1为原动件时,该机构是 否有确定的运动?
B 3 3 1 O A B
2
O΄
O 1 2 A
O΄
题2图
题答图
• 解 在绘制机构运动简图时,首先必须搞清 机构的组成及运动传递情况。在图示机构中, 偏心盘1为原动件,其与机架构成转动副A; 偏心盘1与偏心盘2构成转动副O;偏心盘2 与带环的构件3构成转动副O΄;构件3与机 架组成转动副B。 • 根据上述分析,再选定一适当的比例尺和视 图平面,并依次定出各转动副的位置。就不 难画出其机构运动简图,如答图所示。
O 1 A
O A 1 2
3 B 题4图
4
2
3
B
题答图
• 解 在绘制机构运动简图时,首先必须搞
清机构的组成及运动传递情况。在图示
机构中,偏心盘1为原动件,其与机架4
构成转动副O;偏心盘1与构件2构成转
动副A;构件2与滑块3构成转动副B;滑
块3与机架4组成移动副,其相对移动方
向沿OB方向。
• 根据上述分析,再选定一适当的比例尺和 视图平面,并依次定出各转动副的位置和 移动副导路的方位。就不难画出其机构运 动简图,如答图所示。 • 由于该机构具有3个活动构件、3个转动副 和1个移动副,没有高副,没有局部自由 度和虚约束,故机构的自由度为 O1 A • F=3n-(2pL+pH) OA 2 • =3×3-(2×4+0) 1 2 3B • =1
机械原理复习题2

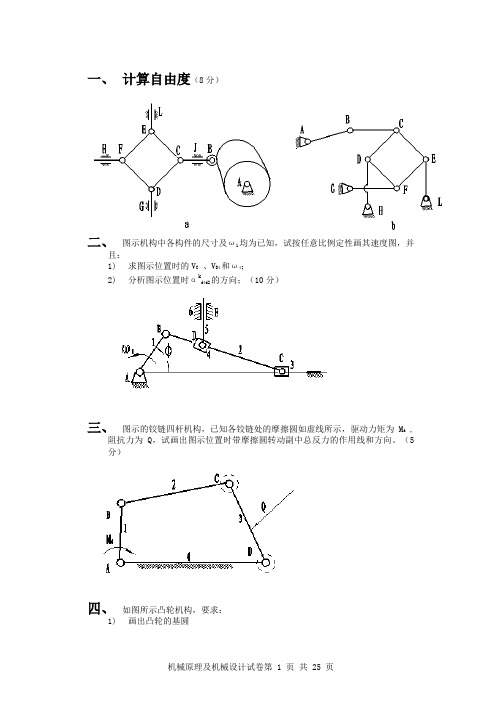
一、计算自由度(8分)二、图示机构中各构件的尺寸及ω1均为已知,试按任意比例定性画其速度图,并且:1)求图示位置时的V C、V D4和ω4;2)分析图示位置时αk d4d2的方向;(10分)三、图示的铰链四杆机构,已知各铰链处的摩擦圆如虚线所示,驱动力矩为M d ,阻抗力为Q,试画出图示位置时带摩擦圆转动副中总反力的作用线和方向。
(5分)四、如图所示凸轮机构,要求:1)画出凸轮的基圆2)画出从升程开始到图示位置时推杆的位移s,相对应的凸轮转角φ,B点的压力角α;(8分)五、计算题在图示机构中,已知各直齿圆柱齿轮模数均为m=2mm,z1 =15,z2=32,z2´=20,z3 =30,要求齿轮1、3同轴线。
试问:1)齿轮1、2和齿轮2´、3应选什麽传动类型最好?为什麽?2)齿轮1、2改变为斜齿轮传动来凑中心距,当齿数不变,模数不变时,斜齿轮的螺旋角为多少?3)若用范成法来加工齿数z1=15的斜齿轮1时,是否会产生根切?(14分)七、简答题:(20分)1.转动副的自锁条件是什麽?螺旋副的自锁条件是什麽?2.在曲柄摇杆机构中,当以曲柄为原动件时,机构是否一定存在急回运动,为什麽?3.若凸轮是以逆时针转动,采用偏置直动推杆时,推杆的导路应偏置于回转中心的哪一侧较合理?为什麽?4.外啮合斜齿圆柱齿轮的正确啮合条件是什麽?5.变位齿轮的分度圆、基圆、周节和基节大小都发生变化了吗?为什麽?6.压力角为15º的齿条(模数可为非标准值)能否与压力角为20º(标准模数)的齿轮正确啮合?为什麽?7.i H GK是不是周转轮系中G、K两轮的传动比?为什麽?8.槽轮机构运动特性系数k的取值范围是什麽?9. 双万向铰链机构传动比恒为1的条件是什麽?10. 什麽是机构稳定运转状态下的周期性速度波动,如何进行调节?一. 选择与填空(本题共12小题,选择题每小题2分,填空题每空1分,满分27分) (1)设图示回转体的材料均匀,制造精确,安装正确,当它绕AA 轴线回转时是处于 状态。
机械原理复习题2.
一、计算自由度(8分)二、图示机构中各构件的尺寸及ω1均为已知,试按任意比例定性画其速度图,并且:1)求图示位置时的V C、V D4和ω4;2)分析图示位置时αk d4d2的方向;(10分)三、图示的铰链四杆机构,已知各铰链处的摩擦圆如虚线所示,驱动力矩为M d ,阻抗力为Q,试画出图示位置时带摩擦圆转动副中总反力的作用线和方向。
(5分)四、如图所示凸轮机构,要求:1)画出凸轮的基圆2)画出从升程开始到图示位置时推杆的位移s,相对应的凸轮转角φ,B点的压力角α;(8分)五、计算题在图示机构中,已知各直齿圆柱齿轮模数均为m=2mm,z1 =15,z2=32,z2´=20,z3 =30,要求齿轮1、3同轴线。
试问:1)齿轮1、2和齿轮2´、3应选什麽传动类型最好?为什麽?2)齿轮1、2改变为斜齿轮传动来凑中心距,当齿数不变,模数不变时,斜齿轮的螺旋角为多少?3)若用范成法来加工齿数z1=15的斜齿轮1时,是否会产生根切?(14分)七、简答题:(20分)1.转动副的自锁条件是什麽?螺旋副的自锁条件是什麽?2.在曲柄摇杆机构中,当以曲柄为原动件时,机构是否一定存在急回运动,为什麽?3.若凸轮是以逆时针转动,采用偏置直动推杆时,推杆的导路应偏置于回转中心的哪一侧较合理?为什麽?4.外啮合斜齿圆柱齿轮的正确啮合条件是什麽?5.变位齿轮的分度圆、基圆、周节和基节大小都发生变化了吗?为什麽?6.压力角为15º的齿条(模数可为非标准值)能否与压力角为20º(标准模数)的齿轮正确啮合?为什麽?7.i H GK是不是周转轮系中G、K两轮的传动比?为什麽?8.槽轮机构运动特性系数k的取值范围是什麽?9. 双万向铰链机构传动比恒为1的条件是什麽?10. 什麽是机构稳定运转状态下的周期性速度波动,如何进行调节?一. 选择与填空(本题共12小题,选择题每小题2分,填空题每空1分,满分27分) (1)设图示回转体的材料均匀,制造精确,安装正确,当它绕AA 轴线回转时是处于 状态。
机械原理复习题及解答 (2)
《机械原理》复习题一.填空题:1两构件通过点、线接触而构成的运动副称为( 高副 );两构件通过面接触构成的运动副称为( 低副 )。
2在其它条件相同时,槽面摩擦大于平面摩擦,其原因是( 正压力分布不均 )。
3设螺纹的升角为λ,接触面的当量摩擦系数为( fv ),则螺旋副自锁的条件为( v arctgf ≤λ )。
4 对心曲柄滑块机构以曲柄为原动件时,其最大传动角γ为( 90度 )。
5 曲柄滑块机构是改变曲柄摇杆机构中的( 摇杆长度和形状 )而形成的。
在曲柄滑块机构中改变( 曲柄 )而形成偏心轮机构。
在曲柄滑块机构中以( 曲柄 )作机架而得到回转导杆机构。
6 用飞轮进行调速时,若其他条件不变,则要求的速度不均匀系数越小,飞轮的转动惯量越( 大 ),在满足同样的速度不均匀系数条件下,为了减小飞轮的转动惯量,最好将飞轮安装在机械的( 高速 )轴上。
7 内啮合斜齿圆柱齿轮传动的正确啮合条件是( 模数和压力角应分别相等且螺旋角相同 ); 8一对斜齿圆柱齿轮传动的重合度由( 端面重合度,轴向重合度 )两部分组成,斜齿轮的当量齿轮是指( 以法向压力角为压力角,以法向模数为模数作的 )的直齿轮;9、3个彼此作平面平行运动的构件间共有( 3 )个速度瞬心,这几个瞬心必定位于( 同一条直线上 )上;10、含有6个构件的平面机构,其速度瞬心共有( 15 )个,其中有( 5 )个是绝对瞬心,有( 10 )个是相对瞬心;11周期性速度波动和非周期性速度波动的调节方法分别为( 安装飞轮 )和( 使用电动机,使等效的驱动力矩和等效阻力矩彼此相互适应 );12 在凸轮机构推杆的四种常用运动规律中( 一次多项式 ) 运动规律有刚性冲击, ( 二次多项式 ) 运动规律有柔性冲击; ( 正弦 ) 运动规律无冲击;13 凸轮的基圆半径是指( 凸轮回转轴心 )至 ( 凸轮 )最小半径。
14在设计凸轮机构时,凸轮的基圆半径取得越 小 ,所设计的机构就越紧凑,但是压力角越 大 ,使机构的工作情况变坏。
机械原理复习试题及答案
一、填空题:1.机构具有确定运动的条件是机构的自由度数等于原动件数目。
2.同一构件上各点的速度多边形必相似于于对应点位置组成的多边形。
3.在转子平衡问题中,偏心质量产生的惯性力可以用相对地表示。
4.机械系统的等效力学模型是具有,其上作用有的等效构件。
5.无急回运动的曲柄摇杆机构,极位夹角等于6.平面连杆机构中,同一位置的传动角与压力角之和等于7.一个曲柄摇杆机构,极位夹角等于36º,则行程速比系数等于。
8.为减小凸轮机构的压力角,应该凸轮的基圆半径。
9.凸轮推杆按等加速等减速规律运动时,在运动阶段的前半程作运动,后半程作运动。
10.增大模数,齿轮传动的重合度;增多齿数,齿轮传动的重合度。
11.平行轴齿轮传动中,外啮合的两齿轮转向相,内啮合的两齿轮转向相。
12.轮系运转时,如果各齿轮轴线的位置相对于机架都不改变,这种轮系是轮系。
13.三个彼此作平面运动的构件共有个速度瞬心,且位于14.铰链四杆机构中传动角γ为,传动效率最大。
15.连杆是不直接和相联的构件;平面连杆机构中的运动副均为16.偏心轮机构是通过由铰链四杆机构演化而来的。
17.机械发生自锁时,其机械效率。
18.刚性转子的动平衡的条件是19.曲柄摇杆机构中的最小传动角出现在与两次共线的位置时。
20.具有急回特性的曲杆摇杆机构行程速比系数。
21.四杆机构的压力角和传动角互为。
22.一个齿数为Z,分度圆螺旋角为β的斜齿圆柱齿轮,其当量齿数为23.设计蜗杆传动时蜗杆的分度圆直径必须取值,且与其相匹配。
24.差动轮系是机构自由度等于25.平面低副具有2个约束,个自由度。
26.两构件组成移动副,则它们的瞬心位置在。
27.机械的效率公式为,当机械发生自锁时其效率为。
28.标准直齿轮经过正变位后模数,齿厚。
29.曲柄摇杆机构出现死点,是以作主动件,此时机构的角等于零。
30.为减小凸轮机构的压力角,可采取的措施有和。
31.在曲柄摇杆机构中,如果将杆作为机架,则与机架相连的两杆都可以作____ 运动,即得到双曲柄机构。
机械原理复习题二
机械原理复习题二一、填空题1.牛头刨床滑枕往复运动的实现是应用了平面四杆机构中的机构。
2.机构具有确定运动的条件是数目与数目相等。
3.平面四杆机构的压力角愈,传力性能愈好。
4.平面四杆机构的传动角愈,传力性能愈好。
5.有些平面四杆机构是具有急回特性的,其中两种的名称是机构、机构。
6.在平面四杆机构中,用系数表示急回运动的特性。
7.摆动导杆机构中,以曲柄为原动件时,最大压力角等于度,最小传动角等于度。
8.在摆动导杆机构中,若导杆最大摆角φ= 30°,则其行程速比系数K的值为。
9.四杆机构是否存在止点,取决于是否与共线。
10.在铰链四杆机构中,当最短杆和最长杆长度之和大于其他两杆长度之和时,只能获得机构。
11.平面四杆机构中,如果最短杆与最长杆的长度之和小于其余两杆的长度之和,最短杆为机架,这个机构叫__机构。
12.平面连杆机构急回特性系数K____1时,机构有急回特性。
13.以滑块为主动件的曲柄滑块机构有____个止点位置。
14.凸轮机构主要由、、和三个基本构件组成。
15.盘形凸轮的基圆,是指以凸轮的轮廓的值为半径所作的圆。
16.在凸轮机构中,从动件的运动规律完全由来决定。
17.据凸轮的形状,凸轮可分为凸轮、凸轮和移动凸轮。
18.凸轮机构的压力角是指的运动方向和方向之间所夹的锐角。
19.在实际设计和制造中,一对渐开线外啮合标准斜齿圆柱齿轮的正确啮合条件是相等、相等、且相反。
20.在实际设计和制造中,一对渐开线标准直齿圆柱齿轮的正确啮合条件是、。
21.一对渐开线标准直齿圆柱齿轮的连续传动条件是。
22.在标准齿轮的分度圆上,与数值相等。
23.斜齿圆柱齿轮传动的重合度比直齿圆柱齿轮传动的重合度,因而承载能力。
24..渐开线上各点的压力角不等,向径越大,则压力角越,圆上的压力角为零。
25.单个齿轮的渐开线上任意点的法线必是圆的切线。
26.渐开线齿轮的五个基本参数是齿数、、、系数和顶隙系数。
27.我国规定齿轮标准压力角为度;模数的单位是。
机械原理总复习(总结)

机构的原动件数等于机构自由度F; • 原动件数小于机构自由度F,机构遭到破坏; • 原动件数大于机构自由度F,机构运动不确定; • 机构自由度 F 0 ,机构蜕化为刚性桁架,构件间不可能产生
相对运动。
平面机构自由度的计算
1. 机构的自由度F:机构具有确定运动时所必须给定的独立运动 参数的数目。
3. 盘形凸轮,移动凸轮,圆柱凸轮的运动特点及其内在联系(移 动凸轮可看作回转轴心在无穷远处的盘形凸轮,把移动凸轮卷 成一圆筒则为圆柱凸轮)
4. 尖顶推杆,滚子推杆(尖顶推杆的尖顶作为中心,加一圆滚子, 即得到滚子推杆),平底推杆。 理论轮廓曲线/实际轮廓曲线
5. 直动推杆(对心式或偏置式),摆动推杆 6. 根据推杆与凸轮的相对位置,推杆的运动形式,推杆的端部结
几何尺寸的计算(See pp267)
• 渐开线齿轮正确啮合的条件:两轮的模数和压力角分 别相等
齿轮的中心距和啮合角的关系: acos acos
• 一对齿轮连续传动的条件: B1B2 pb 1
5. 运动连续性:指连杆机构在运动过程中能否连续实现给定的
各个位置的问题。检查是否有错位不连续,错序不连续。
连杆机构设计的基本问题及方法
1. 设计的基本问题:
• 根据给定的运动要求 选定机构的形式;确定各构件的尺寸参数 (即各构件的长度)
• 满足一些附加条件 :结构条件(曲柄存在),传力条件(最小传 动角),连续运动条件
3. 机构:在运动链中,若将某一构件加以固定而成为机架,则这 种运动链便成为机构。机构中的构件(表示法:see pp.19)可分为:
• 机架:被认为固定不动的构件,用来支承活动构件。 • 原动件:按给定的运动规律独立运动的构件。通常标运动方向。 • 从动件:随原动件运动的活动构件。
哈工大机械原理考研-第2章 复习思考题与习题
2.4 复习思考题与习题一、思考题1. 平面四杆机构的基本型式是什么?它有哪几种演化方法?2. 铰链四杆机构的曲柄存在条件是什么?曲柄滑块机构及导杆机构等其它四杆机构的曲柄存在条件是什么?3. 什么是连杆机构的压力角、传动角、急回运动、极位夹角、行程速比系数?连杆机构最小传动角出现在什么位置?如何计算连杆机构的最小传动角?极位夹角与行程速比系数的关系如何?“死点”在什么情况下出现?如何利用和避免“死点”位置?4. 机构运动分析包括哪些内容?对机构进行运动分析的目的是什么?什么叫速度瞬心?相对速度瞬心和绝对速度瞬心有什么区别?如何确定机构中速度瞬心的数目?什么是“三心定理”?对机构进行运动分析时,速度瞬心法的优点及局限是什么?5. 什么是Ⅰ级机构、RRR 杆组、RRP 杆组、RPR 杆组、PRP 杆组、RPP 杆组?什么是相对运动图解法及杆组法?用杆组法对连杆机构进行运动分析的依据及基本思路是什么?6. 何谓摩擦角和摩擦圆?移动副中总反力是如何决定的?何谓当量摩擦系数和当量摩擦角?机械效率的计算方法有哪些?从机械效率的观点来看,机械的自锁条件是什么?7. 平面连杆机构设计的基本问题有哪些? “函数机构”、“轨迹机构”、“导引机构”的设计思想、方法是什么?按给定行程速比系数设计四杆机构的方法是什么?二、习题题2-1 如题2-1图所示导杆机构中,已知mm L AB 400=,偏距mm e 10=。
试问:1. 试判定机构是否具有急回特性,并说明理由。
2. 若滑块的工作行程方向朝右,试从急回特性和压力角两个方面判定图示曲柄的转向是否正确?并说明理由。
题2-2图题2-3 如题图2-3所示曲柄滑块机构:1.设曲柄为主动件,滑块朝右运动 为工作行程。
试确定曲柄的合理转向, 并简述其理由;2.若滑块为主动件,试用作图法确定该机构的死点位置; 题2-3 3.当曲柄为主动件时,画出极位夹角θ,最小传动角min γ。
题2-4 如题2-4 图所示齿轮-连杆组合机构中,构件3带动齿轮2(行星齿轮)绕固定齿轮1(中心轮)转动,试用速度瞬心图解法求图示位置构件2与4的传动比2424/i ωω=。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
n1 nP
z6 n4 nH 66 i n6 nH z4 30
H 46
n6 0, nH nQ,n4 nP
i
H 46
n4 nQ n6 nQ
nP nQ 0 nQ
66 30
nP nQ
66 nQ 30
iPQ
nP 96 nQ 30
(2) 曲柄滑块机构 已知 K ,滑块行程 H ,偏距 e,设计此机构 。 ①计算: θ =180°(K-1)/(K+1); ②作C1 C2 =H
③作射线C1O 使∠C2C1O=90°-θ,
作射线C2O使∠C1C2 O=90°-θ。
④以O为圆心,C1O为半径作圆。 ⑤作偏距线e,交圆弧于A,即为所求。 ⑥以A为圆心,A C1为半径作弧交于E,得: l2 = A C2-EC2/ 2 l1 =EC2/ 2
R
B2 理论廓线
齿轮机构
分度圆直径: d=mz 基圆直径: db=dcosα 全齿高:h= ha+hf =(2ha* +c*)m 齿顶圆直径: da=d+2ha=(z+2ha*)m 齿根圆直径: df=d-2hf =(z-2ha*-2c*)m
任意圆压力角αi=arccos(rb/ri)
非标准装时,两分度圆将分离,此时有:a’ >a 基圆不变: rb1+rb2 = (r1’+r2’)cosα’ = a’cosα’ 两轮节圆总相切 a=r’1+ r’2 两轮的传动比: i12 = r’2 / r’1 重要结论:a’cosα’= a cosα
n1 8.4 代入n3=0,得: nH
在4-2’-2-3-H的转化机构中:
n4 nH z 2 z 3 555 0 30 74 i (1) n3 nH z4 z2 72 32 576
H 43
代Hale Waihona Puke n3=0,得:或:iH 14
n4 21 nH 576
n1 nH z z 32 72 576 (1)1 2 4 n4 nH z1 z2 10 30 75
自由度计算
F=3×7-2×10=1
F=3×7-2×10=1 注意:构件2、3、4 连接处为复合铰链。
滚动杠杆机构 F=3×4-2×5-1=1 F=3×5-2×7=1(高副低代后)
凸轮拨杆机构 F=3×3-2×3-2=1 F=3×5-2×7=1(高副低代后)
7
H
7 I
H 6
I
G 5
6
8 F J E
nQ
30 30 nP 4239 96 96 1325rpm
nQ和n1 同向
平面机构的力分析
n4 21 代入n1=8.4nH,得: nH 576
n1 n1 n H 8.4 i14 230.4 n4 21 n4 576 nH
n1 1450 n4 6.29r / min i14 230.4
转向与齿轮1相同。
齿轮系
6-6 在图示双螺旋桨飞机的减速器中,已知z1=26, z2=20, z4=30, z5=18 及 n1 = 15000 r/min , 求:nP和nQ的大小和方向 解:d3 = 2d2 + d1 mz3=2mz2+mz1 z3=2z2+z1=2×20+26=66 d6 = 2d5 + d4 mz6=2mz5+mz4 z6=2z5+z4=2×18+30=66
G 5
F
8 J
E D 3 C 4
D
3
4
B 2 C 1
B 2
A K O 10
1
A
O1 O
11
9
9
电锯机构 F3n2pLpH38211111
速度瞬心
速度多边形 ①联接p点和任一点的向量代表该 点在机构图中同名点的绝对速 度,指向为p→该点。 ②联接任意两点的向量代表该两点 在机构图中同名点的相对速度, 指向与速度的下标相反。如bc代 表VCB而不是VBC ,常用相对速 度来求构件的角速度。 ③∵△abc∽△ABC,称abc为ABC的速 度影象,两者相似且字母顺序一致。 前者沿ω 方向转过90°。称pabc为 PABC的速度影象。 ④极点 p 代表机构中所有速度为零的 点的影象。
aB2+
arB3B2
? ∥BC
+ akB3B2
2VB3B2ω 3 √ 19.2m/s2
ω 23lBC BC 4.8m/s2
l 1 ω 21 ? BA √ 29.1m/s2 54m/s2
ua=9m/s2/mm
平面四杆机构的设计 (1) 曲柄摇杆机构 已知:CD杆长,摆角φ及K, 设计此机构。步骤如下: ①计算θ=180°(K-1)/(K+1);
H i13
z n1 nH 66 3 n3 nH z1 26
n3 0, nH nP
H i13
n1 nH n1 nP 66 n3 nH 0 nP 26
66 nP 26 i1P n1 26 66 92 nP 26 26
nP 26 26 n1 15000 92 92 4239rpm nP和n1 同向
凸轮机构
αE
S
hE E e ω r0 αmax O θ φ A R hF αF
F
• S=hF-hE • Sin α =(e-loAcos θ)/(R+rT) • θ =180时,α为 αmax
理论廓线
v B1
n
F
-
F D
E O A n
B
R
理论廓线
高副低代
- n v B
F
E O A n
齿轮系 在图示的3K型行星减速机中,已知Z1=10,Z2=32,Z3=74, Z4=72,Z2′=30及电动机转速为1450r/min。求输出轴转速 n4。 解: 分析轮系,此轮系是由两个周转轮系组合而成。第 一个是1-2-3-H,第二个是4-2’-2-3-H。 在1-2-3-H的转化机构中: n1 nH 74 H 1 z3 i13 (1) 7.4 n3 nH z1 10
2-7在图示摆动导杆机构中,∠BAC=900,lAB=60mm,lAC=120mm,曲柄AB的等 角速度w1=30rad/s,求构件3的角速度和角加速度
uv=0.6m/s/m m
0.8m/s 1.8m/s 1.61m/s
uv=0.6m/s/mm
aB3 =
大小: 方向: ? ?
an
B3+
at
B3 =
②任取一点D,作等腰三角形 腰长为CD,夹角为φ; ③作C2P⊥C1C2,作C1P使 ∠C2C1P=90°-θ,交于P;
④作△P C1C2的外接圆,则A点必在此圆上。 ⑤选定A,设曲柄为a ,连杆为a ,则: A C1= a+b ,A C2=b- a => a =( A C1-A C2)/ 2 ⑥以A为圆心,A C2为半径作弧交于E,得: a =EC1/ 2 b = A C1-EC1/ 2