同济大学机械原理期末复习参考资料
《机械原理》复习要点
《机械原理》复习要点(2022-6-17)一、重要知识点(一)填空题(15%~20%)机器(由哪四大部分组成)。
自由度的定义,作平面运动的自由构件的自由度数目。
运动副如何区分高副和低副。
引入高副、低副分别会引入多少个约束。
在铰链四杆机构中,以不同的杆为机架时四杆机构的名称。
曲柄滑块机构的传动角。
四杆机构的行程速比系数K与极位夹角θ的关系。
曲柄摇杆机构以曲柄主动时最小传动角发生在什么位置。
当四杆机构的压力角α=90°时传动角的值及位置。
凸轮机构按从动件端部形式可分哪几种。
凸轮机构按凸轮形状分可为哪几种。
凸轮基圆半径、压力角的变化对机构工作情况的影响。
渐开线标准直齿圆柱齿轮传动的正确啮合条件。
斜齿轮的模数和压力角怎么取标准值。
轮系分为哪几种。
周转轮系的转化机构的含义。
瞬心的含义。
静平衡和动平衡的径宽比要求。
(二)选择题(15%~20%)机构具有确定运动的条件。
虚约束、局部自由度、复合铰链的含义。
平面四杆机构压力角α与传动角γ的关系。
平面四杆机构无急回特性时,压力角、传动角、极位夹角的情况。
以曲柄为原动件时,对心曲柄滑块机构的传动角。
为提高曲柄摇杆机构的传力性能,应该怎样做。
凸轮的从动件作等加速等减速运动时所产生的影响。
凸轮机构从动件在什么条件下时会出现刚性冲击。
减小凸轮基圆半径对凸轮压力角的影响。
对于齿数相同的齿轮,模数越大时的影响。
当两渐开线齿轮的中心距略有改变时对齿轮传动的影响。
一对渐开线齿轮连续传动的条件。
什么情况下会发生根切现象。
用范成法切制齿轮时,什么条件下可用同一把滚刀。
加工两只正常齿制渐开线直齿圆柱外齿轮时对刀具的要求。
平行轴斜齿圆柱齿轮机构与直齿圆柱具齿轮机构相比的优点。
当圆销所在拨盘作单向连续运动时槽轮的运动。
周转轮系与定轴轮系的根本区别。
惰轮的含义与在图中的识别。
绝对瞬心、相对瞬心的含义。
静平衡的方法有哪些。
(三)判断题(15%~20%)零件的含义。
平面四杆机构的传动角。
同济大学机械设计总复习重点

同济大学机械设计总复习重点文档编制序号:[KK8UY-LL9IO69-TTO6M3-MTOL89-FTT688]同济机械学院《机械设计》复习要点一、机械设计中的强度问题 1、几种稳定循环变应力 (1)变应力参数最大压力 m ax σ 最小应力 min σ 应力幅 2minmax σσσ-=a平均应力 2minmax σσσ+=m应力比(循环特性) m axm inσσγ=(2)对称循环变应力:max min σσ-=、max σσ=a 、0=m σ、1-=γ (3)脉动循环变应力:0min =σ、2maxσσ=a 、2maxσσ=m 、0=γ(4)静应力2、变应力下的强度条件(1)不同循环次数N 时的疲劳极限当0N N 时 N m N K NN ⋅==γγγσσσ0当0N N 时 γγσσ=N(2)同一循环次数,不同应力比(循环特性)γ时的疲劳极限已知材料的机械性能1-σ、0σ(σϕ)、s σ,可作出(材料的极限应力)γσ的简图 (σK )零件的极限应力图 应力比:C =γ时 平均应力:C m =σ时 最小应力:C =min σ时 例:二、机械传动 A 、带传动1、带传动的工作情况分析受力分析:0212F F F =+ e F F F =-21αv f e F F =211201-=+=ααv v f f ec ece e F F F F 11202-=-=αv f ec ec e F F F F1120lim+-==ααv v f f ec f e e F F F应力分析:拉应力 弯曲应力 离心拉应力2min σσσ+=c 11max b c σσσσ++=运动分析:2、带传动的失效形式及设计准则:3、带传动的设计:4、张紧装置:定期张紧装置自动张紧装置张紧轮的布置例:P164习题8-1、8-2B、齿轮传动1、齿轮传动的失效形式:轮齿折断、齿面点蚀、齿面胶合、齿面磨料磨损、齿面塑性变形2、设计准则3、齿轮材料及热处理对齿轮材料性能的基本要求:为齿面要硬、齿芯要韧 锻钢、铸钢、铸铁、非金属 4、直齿圆柱齿轮传动(1)受力分析:力的大小 力的方向 (2)计算载荷:βαK K K K K V A = (3)齿轮强度条件:齿面接触疲劳强度条件、齿根弯曲疲劳强度条件 (4)讨论:1)接触应力与接触强度 2)弯曲应力与弯曲强度3)齿形系数 ↓↑→F Y z4)提高齿轮接触疲劳强度的措施:几何参数d 、b 、材料[]H σ 5)提高齿根弯曲疲劳强度的措施:几何参数m 、b 、材料[]F σ 5、斜齿圆柱齿轮传动(1)斜齿轮强度计算的特点:当量齿轮 计算特点 (2)受力分析:力的分解 力的大小 力的方向 (3)斜齿轮的强度条件尺寸相同时: 斜齿轮承载能力大于直齿轮 外载和材料相同时: 斜齿轮尺寸小于直齿轮 6、直齿圆锥齿轮传动(1)直齿圆锥齿轮强度计算的特点:当量齿轮 计算特点 (2)受力分析: 力的大小 主、从动轮上力的关系 力的方向 7、齿轮设计中有关参数的选择原则 (1)材料与热处理方式 (2)精度等级 (3)齿数 (4)齿宽系数 (5)模数 (6)分度圆螺旋角 例:P236习题10-1、10-7 8、蜗杆传动蜗杆传动的类型及其特点:主要参数蜗杆传动的失效形式和设计准则材料及热处理普通圆柱蜗杆传动蜗杆传动的效率和热平衡计算例:P272习题11-1三、轴系零、部件 1、滑动轴承(1)不完全液体润滑滑动轴承的失效形式及计算准则(2)液体动力润滑径向滑动轴承的基本理论 1)压力油膜形成的原理 2)流体动力润滑的基本方程 一维雷诺方程306hh h v dx dp-=η 讨论一:形成流体动力润滑(形成动压油膜)的必要条件: 由306hh h v dx dp-=η 1)两工作表面必须形成收敛的楔形间隙 若0h h =,则0=dxdp2)两工作表面必须有一定的相对运动,且V 方向是从大口到小口 3)间隙中必须连续充满具有一定粘度的润滑油无粘度→各油层无速度→两板间油无流动→不能形成油膜压力讨论二:径向滑动轴承形成流体动力润滑的过程(3)承载能力计算公式P C vBF 22ψη=1)当轴承结构(d ,B ,ψ,χ,η,v )确定由P C d B ⇒⎪⎭⎪⎬⎫χ,则可计算承受多大的径向载荷F2)计算F vBC P ηψ22=由χ⇒⎪⎭⎪⎬⎫P C d B ,则可计算承受径向外载荷F 时,要多大的()χψ-=1min r h3)主要参数的选择 相对间隙r r R -=ψ、宽径比d B 、偏心率rR e-=χ、 最小油膜厚度()χψ-=1min r h4)热平衡计算2、滚动轴承(1)滚动轴承的主要类型:向心轴承、推力轴承、向心推力轴承(2)滚动轴承的代号:基本代号(3)滚动轴承的类型选择1)载荷的大小、方向和性质2)其它:转速、旋转精度、调心性能、装拆方便、价格(4)滚动轴承的尺寸选择(5)滚动轴承的组合设计1)轴系支承的结构形式:双支点各单向固定一支点双向固定、另一支点游动两端游动支承2)轴系支承设计的两个特殊问题(6)滚动轴承的疲劳寿命计算1)寿命计算公式2)轴承的当量动载荷:考虑实际工况,引入载荷系数fP3)角接触球轴承和圆锥滚子轴承轴向载荷F的计算a4)轴承寿命计算步骤例:P338例13-1、13-23、轴 (1)轴的类型 (2)轴的强度计算1)按扭转强度计算(初估轴径)30nP A d ≥ 2)按弯扭合成强度计算(一般轴)将T 产生的扭剪应力转化为对称循环变化来考虑()22T M M ca α+=[]1-≤=σσWM caca 3)按安全系数校核计算(重要轴)[]S S S S S S ca ≥+=22τστσ []S K S m a ≥+=-σϕσσσσσ1 []S K S ma ≥+=-τϕτττττ1考虑应力集中、绝对尺寸、表面质量及强化措施对轴疲劳强度的影响(3)轴系结构设计 例:P383习题15-4、15-6四、机械连接 1、螺纹连接 (1)螺纹副的受力 1)螺纹副的效率:()v ϕψψη+=tan tan三角形螺纹效率低、用于连接,矩形、梯形、锯齿形螺纹用于传动。
机械原理期末考试总复习试题及答案修正版

机械原理复习题及参考答案一、填空题:1.机构具有确定运动的条件是机构的自由度数等于。
2.同一构件上各点的速度多边形必于对应点位置组成的多边形。
3.在转子平衡问题中,偏心质量产生的惯性力可以用相对地表示。
4.无急回运动的曲柄摇杆机构,极位夹角等于,行程速比系数等于。
5.平面连杆机构中,同一位置的传动角与压力角之和等于。
6.一个曲柄摇杆机构,极位夹角等于36º,则行程速比系数等于。
7.为减小凸轮机构的压力角,应该凸轮的基圆半径。
8.增大模数,齿轮传动的重合度;增多齿数,齿轮传动的重合度。
9.平行轴齿轮传动中,外啮合的两齿轮转向相,内啮合的两齿轮转向相。
10.轮系运转时,如果各齿轮轴线的位置相对于机架都不改变,这种轮系是轮系。
11.三个彼此作平面运动的构件共有个速度瞬心,且位于。
12.铰链四杆机构中传动角 为,传动效率最大。
13.连杆是不直接和相联的构件;平面连杆机构中的运动副均为。
14.机械发生自锁时,其机械效率。
15.刚性转子的动平衡的条件是。
16.曲柄摇杆机构以曲柄作为主动件时,最小传动角出现在与两次共线的位置时。
17.具有急回特性的曲杆摇杆机构行程速比系数k 1。
18.四杆机构的压力角和传动角互为,压力角越大,其传力性能越。
19.差动轮系是机构自由度等于的周转轮系。
20.平面低副具有个约束,个自由度。
21.两构件组成移动副,则它们的瞬心位置在。
22.机械的效率公式为,当机械发生自锁时其效率为。
23.曲柄摇杆机构出现死点,是以作主动件,此时机构的角等于零。
24.在曲柄摇杆机构中,如果将杆作为机架,则与机架相连的两杆都可以作____ 运动,即得到双曲柄机构。
25.凸轮从动件作等速运动时在行程始末有性冲击;当其作运动时,从动件没有冲击。
26.标准齿轮圆上的压力角为标准值,其大小等于。
27.具有一个自由度的周转轮系称为轮系,具有两个自由度的周转轮系称为________________轮系。
二、计算与作图题:1.计算图示机构的自由度,要求指出可能存在的复合铰链、局部自由度和虚约束。
机械原理期末复习资料仅供参考
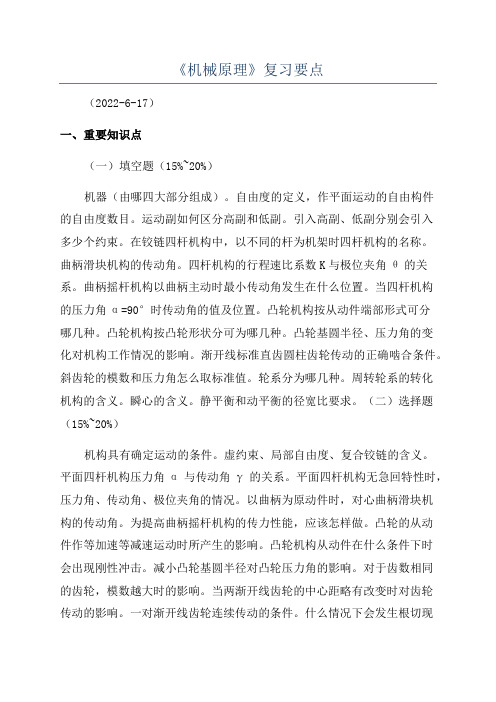
“机械原理”期末复习2 — 3试画出图示机构的运动简图,并计算其自由度。
n = 3, P i=4, P h =。
F =3n 2p i - P h =3 3-2 4 =1试画出简易冲床的运动简图,并计算其自由度。
n = 5, p i =7, p h =。
F =3n 2p i- P h=3 5-2 7=1图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A连续回转,而装在轴A上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的,试绘出其机构运动简图,分析是否能实现设计意图,并提出修改方案。
可修改为: n =4, p i =5, p h =1F =3n-2p i - p h =3 4 -25-1 =1n = 3, P i = 4, p h = 1F =3n-2p i- P h=3 5-2 7-1=。
计算图示自动送料剪床机构的自由度,并指出其中是否有复合皎链、局部自由度或虚约束。
=HGC 、F 为复合皎链,I 为局部自由度,EFGC 为虚约束。
n =12, p i =17, p h =1, F =1, p =1 F =3n-2p i-p h -F p =3 12-2 17-1-1 1 =1:C 为复合皎链,I 为局部自由度(焊死), EFGC 为虚约束(去掉)。
n = 8, p i = 11, P h = 1F =3n-2p i - p h =3 8-2 11-1-1Pa66图3-35 a 解:去掉局部自由度 B,C ,虚约束Fn= 3, p i = 3, p h = 2 F =3n-2p i - p h =3 3-2 3-2 =1图3-35 c 解:局部自由度 B,复合皎链En = 7, p i =9, p h = 1F =3n-2p i - p h=3 7 -2 9-1 =2葺E 葺DDE = CF\\解1n速度瞬心法作平■面运动的速度分析4-1 在图示的四杆机构中,已知 l AB =60mm, l cD =90mm, l AD =l Bc =120mm, wi =10rad/s ,试用瞬心法求:(1) 当())=165。
机械原理期末考试复习资料PPT课件
5
2.局部自由度
所谓局部自由度:是指机构中某些构件所具有的不影响其他
构件运动的自由度
F==33n3--22PL3--P1H=2 ×
F==33n3--22PL-3-P1H--1F=1√
3
F==33n2--22PL-2-P1H=1√
2
△ 在计算时,应除去局部自度。
1 △ 如不剔除局部自由度,计算的 结果将比正确值大。
可编辑课件
30
矢量方程图解法的基本原理
B
B(B1B2)
A
同一构件上两点间的运动关系
1 2
两构件重合点间的运动方程
vB vAvBA
vB2vB1vB2B1
aB aA aBA
aB 2aB 1aB r2B 1aB k2B 1
aA aBnA aBt A
a 2 v 可编辑课件k B2B1
1 B2B1
机构简图
可编辑课件
21
2
5
1′
3 1
4
5 4
2
1′ 3
1
3 4
2 1′ 1
题图
F 3n 2PL PH
342511
可编辑课件
22
2
3
5
1’
1 4
F 3n 2PL PH
342511
3 4
2 1′ 1
题图
2 3
4
1’
1 F 3n 2PL PH
332321
可编辑课件
23
例 计算下列机构的自由度
1
2
4
5
4. 构件的角速度和角加速度的求法
5. 科氏加速度存在条件、大小、方向的确定
6. 最后说明机构运动简图、速度多边形及加速度多边形的
机械原理期末考试总复习
PL=3n/2
平面机构结构分析的步骤: 1.去除局部自由度和虚约束,高副低代, 并标出原动件。 2.从远离原动件的地方开始,先试拆二级 杆组,不行,再试拆n=4的杆组。当分出 一个杆组后,再次试拆时,仍需从最简单 的二级杆组开始试拆,直到只剩下机架和 原动件为止。 *杆组的增减不应改变机构的自由度。
六、渐开线齿廓的根切现象
根切:刀具的齿顶线与啮合线的交 点超过被切齿轮的极限点,刀具的 齿顶将齿轮齿跟的渐开线齿数
2h zmin sin 七、齿轮的变位
* a 2
标准 zmin=17
将刀具相对加工标准齿轮时的位置远离或靠 近轮坯中心来加工齿轮。
3.判断机构的级别。
第二章 平面机构的运动分析
一、速度瞬心法
1、速度瞬心: 两作相对运动的刚体,其相对速度为 零的重合点。 绝对瞬心:两构件其一是固定的 相对瞬心:两构件都是运动的
i构件和j构件瞬心的表示 方法:Pij或Pji
2、瞬心数目 若机构中有k个构件,则
∵每两个构件就有一个瞬心
∴根据排列组合有 N (k -1) (k - 2) ... 1 k(k -1)
3)虚约束Redundant Constraints 1、虚约束: 在机构中与其他运动副作用重复,而对 构件间的相对运动不起独立限制作用的约束。 2、处理办法: 将具有虚约束运动副的构件连同它所 带入的与机构运动无关的运动副一并不计。
3、常见的虚约束:
1) 当不同构件上两点间的距离保持恒定, 若在两点之间加上一个构件和两个转动副, 虽不改变机构运动,但却引入一个虚约束。
机械原理期末考试复习题(含答案)(同名3286)

机械原理考试复习题一、填空题:1.机构具有确定运动的条件是机构的自由度数等于。
2.同一构件上各点的速度多边形必于对应点位置组成的多边形。
3.在转子平衡问题中,偏心质量产生的惯性力可以用相对地表示。
4.机械系统的等效力学模型是具有,其上作用有的等效构件。
5.无急回运动的曲柄摇杆机构,极位夹角等于,行程速比系数等于。
6.平面连杆机构中,同一位置的传动角与压力角之和等于。
7.一个曲柄摇杆机构,极位夹角等于36º,则行程速比系数等于。
8.为减小凸轮机构的压力角,应该凸轮的基圆半径。
9.凸轮推杆按等加速等减速规律运动时,在运动阶段的前半程作运动,后半程作运动。
10.增大模数,齿轮传动的重合度;增多齿数,齿轮传动的重合度。
11.平行轴齿轮传动中,外啮合的两齿轮转向相,内啮合的两齿轮转向相。
12.轮系运转时,如果各齿轮轴线的位置相对于机架都不改变,这种轮系是轮系。
13.三个彼此作平面运动的构件共有个速度瞬心,且位于。
14.铰链四杆机构中传动角γ为,传动效率最大。
15.连杆是不直接和相联的构件;平面连杆机构中的运动副均为。
16.偏心轮机构是通过由铰链四杆机构演化而来的。
17.机械发生自锁时,其机械效率。
18.刚性转子的动平衡的条件是。
19.曲柄摇杆机构中的最小传动角出现在与两次共线的位置时。
20.具有急回特性的曲杆摇杆机构行程速比系数k 1。
21.四杆机构的压力角和传动角互为,压力角越大,其传力性能越。
22.一个齿数为Z,分度圆螺旋角为β的斜齿圆柱齿轮,其当量齿数为。
23.设计蜗杆传动时蜗杆的分度圆直径必须取值,且与其相匹配。
24.差动轮系是机构自由度等于的周转轮系。
25.平面低副具有个约束,个自由度。
26.两构件组成移动副,则它们的瞬心位置在。
27.机械的效率公式为,当机械发生自锁时其效率为。
28.标准直齿轮经过正变位后模数,齿厚。
29.曲柄摇杆机构出现死点,是以作主动件,此时机构的角等于零。
30.为减小凸轮机构的压力角,可采取的措施有和。
同济大学 机械原理期末考试复习资料

60 s α
六
解 (1) 瞬心 (2) 速度分析
大小 ? lABω1 方向 //AC ⊥AB P13 p14 P13 ∝ lABω1=10×10=100mm/s × P34 p12 P23 ∝
vB3=vB2+vB3B2
?
铅锤
vB2=
b3 b
’
取µv=1mm/s/mm作图 vc= vB3= 50mm/s (3) 加速度分析 大小 ? lABω12 方向 //AC B→A
200Nm
Mer D E
1300
ϕ
C
o
200
300
解: 求等效阻力矩 1.求等效阻力矩 [(20/2)+30+130/2]×200 × Mer= 180 =117Nm 2. nmin 、nmax及其位置: 及其位置: 分析各盈亏功 117 200 nmin 在D处 处 = 0 ϕ D 20 ϕD=11.7
vB3=50mm/s
ω3=0
∝ 50
p’ p
’
b3
aB3= aB2 +aB3B2
866
2 ? 铅锤 aB2= lABω12=10 ×102=1000mms-1/mm
取µa=1mms-2/mm作图
aB3=866mm/s2
b2
ac3=aB3=866mm/s2
七 解: θ=180×(k-1)/(k+1) =1800×(1.4-1)/(1.4+1) =300 a=(52.47-15.25)/2=18.61mm AC1=b-a=15.25 AC2=b+a=52.47 b=(52.47+15.25)/2=33.87mm γmin=320
n1 z 2 z4 60 × 49 = = = 3.5507 n4 z1 z 3 36 × 23 n1 n4 = (1) = 281.6 轮系 73.5507 n7 n4 − z6 i4'6 = =− n6 − n7 z 4' n4 − n7 131 = −1.9 (2) =− 69 − n7 n7 − nH z9 H i79 = =− n9 − nH z7