Halcon标定文件资料地生成及标定板规格
第11章 HALCON标定方法
HALCON编程基础与工程应用
相机坐标系到图像坐标系
从相机坐标系到图像坐标系属于透视投影变换关系,即将3D图像信 息转换成2D图像信息。其中点P是相机坐标系中的点,点p(x,y)是像 极坐标系中的点P在图像坐标系上的投影点。
ABOC ~ oCOC
AB AOC PB XC ZC YC oC oOC pC x f y
R(
)
0
1
0
sin 0 cos
cos sin 0
R( ) sin cos 0
0
0 1
总的旋转矩阵,也就是三者的乘积。
R(, , ) R()R( )R( )
平移矩阵T (tx,ty ,tz ) ,tx、ty、tz 是世界坐标系原点与相机坐标系目标点
第11章 HALCON标定方法
◆ 11.1 标定的目的 ◆ 11.2 标定理论 ◆ 11.3 HALCON标定流程 ◆ 11.4 HALCON标定助手 ◆ 11.5 标定应用例程之二维测量
HALCON编程基础与工程应用
11.1 标定的目的
相机需要标定的原因之一就是镜头畸变。所有光学相机镜头都存 在畸变的问题,畸变属于成像的几何失真,它是由于焦平面上不同 区域对影像的放大率不同而形成的画面扭曲变形现象,这种变形的 程度从画面中心至画面边缘依次递增,主要在画面边缘反映的较为 明显。所以相机标定就是为了消除相机镜头在拍摄过程中产生的畸 变。和梯 形畸变。
HALCON编程基础与工程应用
11.3 HALCON标定流程 相机参数确定 HALCON标定板规格 生成标定板
HALCON编程基础与工程应用
1、相机参数确定
Halcon标定板制作

Halcon标定板
什么是Halcon
Halcon是来自德国的一款图像处理软件,在世界范围内广泛使用的机器视觉软件。
是公认的、具有最佳效果的一种图像处理软件。
它源自学术界,有别于市面上一般的商用软件包,事实上这一套软件是由一千多个各自独立的函数,以及底层的数据管理核心构成。
其中包含了各类滤波,色彩以及几何、数学转换,型态学计算分析、校正,分类辨识。
halcon的应用范围几乎没有限制,涵盖医学,遥感探测,监控,到工业上的各类自动化检测。
促成了高科技业,电子业产能的大幅提升。
也是机器视觉用的最多的一种软件。
如何制作Halcon标定板?
以63*63mm的规格举例:
黑色圆点行数:7
黑色圆点列数:7
外边框长度:63mm*63mm
内边框长度:59.0625mm*59.0625mm
即:黑色边框线为一个圆点半径(3.9375)
黑色圆点半径: 3.9375mm
圆点中心间距:7.875mm
裁剪宽度63.875mm*63.875mm
即:由黑色边框向外延伸0.875mm
边角:由黑色外边框向内缩进一个中心边距的长度(7.875mm)
这个就是halcon标定描述文件生成的一个的标定板规格。
Halcon标定板的中心距就是外形尺寸
桂庆光电粟工135-49414687。
halcon相机标定和测量示例
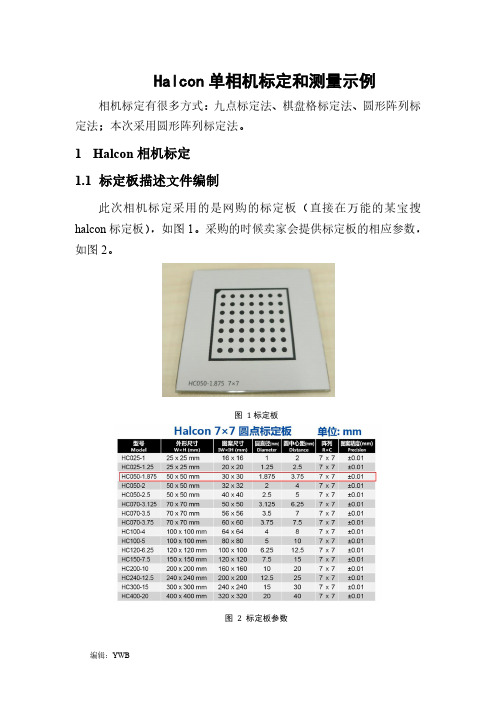
Halcon单相机标定和测量示例相机标定有很多方式:九点标定法、棋盘格标定法、圆形阵列标定法;本次采用圆形阵列标定法。
1Halcon相机标定1.1标定板描述文件编制此次相机标定采用的是网购的标定板(直接在万能的某宝搜halcon标定板),如图1。
采购的时候卖家会提供标定板的相应参数,如图2。
图1标定板图 2 标定板参数用halcon标定助手标定的时候需要用到标定板的描述文件,此文件可以用gen_caltab算子自己编制。
如下为函数说明:gen_caltab( : : XNum, YNum, MarkDist, DiameterRatio, CalPlateDescr, CalPlatePSFile : ) 函数说明:创建一个标定文件和相应的脚本文件。
函数参数:Xnum:输入X方向标记(圆点)的数量,Xnum>1;Ynum:输入Y方向标记(圆点)的数量,Ynum>1;MarkDist:标记圆圆心间距离,单位“m”;(我看过一个资料翻译为标记点大小,差点被坑死)DiameterRatio:两标记点距离和标记直径的比值,默认:0.5。
0<DiameterRatio<1.0;CalPlateDescr:输入要保存的标定文件(此文件保存路径在算子窗口可更改),默认值: 'caltab.descr',参考: 'caltab.descr', 'caltab_100mm.descr', 'caltab_10mm.descr', 'caltab_200mm.descr', 'caltab_30mm.descr';CalPlatePSFile :标定板图像文件的文件路径(此文件保存路径在算子窗口可更改),默认: 'caltab.ps',后缀:ps。
此算子“XNum, YNum, MarkDist, DiameterRatio”这四个参数根据图2所示的标定板参数设置。
halcon单相机标定详细说明

XYZ
方向平移和旋转标定板,采集 18 张图像
图 9 Halcon 三维标定采集图像示例
3、Halcon 的二维标定,只在 XY 平面内平移和旋转标定板,采集 影响提高标定精度
18 张图像,减小 Z 的
实验数据:
方法一 方法二 方法三
图像坐标 X 方向像素物理距离 15.5618um 15.7575um
,
这就使得主点不一定在图像的帧存中心 ,故需要标定 ,,的值。
单个像元的高宽 ????,????,该数据可以在制造商提供的技术文档中查到,但是该数据不是 完全准确的。 单个像元的高宽理论上应该是相等的, 但是由于制造的误差, 两者不可能完全
相等,因此需要根据实际情况对其进行修正。
透镜的畸变失真系数前面讲到理想的透镜成像才满足线性关系
征点提取的算法了。 Halcon 的标定板如图 5 所示,黑色的边框中有阵列分布的原点,在边 框的左上角有个小三角用来确定其旋转的位置。
以 30*30mm 的标定板为例:
黑色原点: 7*7 边框长度: 30*30mm 内边框长度: 28.125mm*28.125mm 黑色原点半径: 0.9375mm 原点中心间距: 3.75mm 裁剪宽度: 30.75*30.75mm
针孔模型是理想透镜的成像模型,但是实际中相机的透镜不可能是理想的模型,透镜形
状的非理想特征造成像点会沿径向发生畸变。一个像点沿径向内缩叫负畸变
,或桶形畸变沿
径向外延叫正畸变 ,或枕形畸变。这种崎变相对于光轴严格对称的
,也是畸变的主要分量 [2] 。
( X u ,Y u)为矫正后的坐标, (X d ,Y d)是受到镜头失真影响而偏移的像平面坐标,径向 径向畸变模型:
标定的方法从原理上主要分为三大类:线性标定、非线性标定和二次标定。 使用的标定板有棋盘格也有原点阵列,如图 4 所示。
HALCON数字图像处理 第11章 标定

2、标定的内外参数
外部参数:由前面可知,相机的外部参数是用来描述相机坐标系与世
界坐标系的关系,它表明相机在世界坐标系中的位置和方位,可用旋
转矩阵和平移向量来表示。实质上旋转矩阵只有三个独立参数,加上
平移向量的三个参数,故一共有6个独立的外部参数。
内部参数:内部参数只与相机内部结构有关,而与相机位置参数无关,
否则HALOCN会提示有品质问题。
HALCON数字图像处理
标定板图像
(a)
(c)
HALCON数字图像处理
(b) (d)
2、 HALCON标定助手标定过程
步骤1: 打开标定助手,设定描 述文件,标定板厚度,相机类 型、焦距等参数。
图中 ,表示Sx和Sy按照1:1的关 系关联,同步调节,因为面阵相机 的像元一般是方形的,宽和高是一 样的。如果取消关联,那么Sx和Sy
HALCON数字图像处理
图像成像坐标系到图像像素坐标系
如图所示,图像成像坐标系是以毫米为单位的直角坐标系 X-Y。用(Xf ,Yf)来描述图像像素坐标系中的点,用 (Xd ,Yd)来描述图像成像坐标系中的点。图像成像坐 标系的原点O在图像像素坐标系中的坐标为(Cx, Cy),用 dx、dy 来表示相邻像素点中心在 X 轴方向和Y轴方向的 实际物理距离。
可以异步调节。
步骤2:加载图像,可以实时采集,也 可以采集好后再一起标定,建议先采 集后标定。图中所示加载标定板图像 的窗口,还需要将其中的一幅图像设 置为参考位姿。
HALCON数字图像处理
步骤3:在采集图片合格后,点击上 一步骤图中的“标定”按钮,标定 结果就出来了,如图所示,在这一 步的窗口中,会有标定之后的相机 内外参数等标定结果。
halcon自标定方法
halcon自标定方法Halcon自标定方法Halcon是一种常用的机器视觉软件,用于开发和实现各种图像处理和机器视觉应用。
在机器视觉领域,相机的标定是非常重要的一步,它能够精确地确定相机的内部参数和外部参数,从而提高图像处理的精度和准确性。
Halcon提供了自标定方法,使相机的标定过程更加简便和高效。
自标定方法基于相机的特征点,通过在图像中检测和匹配特征点来确定相机的内部参数和外部参数。
下面将详细介绍Halcon的自标定方法。
1. 特征点提取在自标定过程中,首先需要从图像中提取特征点。
Halcon提供了多种特征点提取算法,如Harris角点检测、SIFT算法等。
根据实际应用场景的需求,选择合适的算法进行特征点提取。
2. 特征点匹配特征点提取后,需要进行特征点的匹配。
Halcon提供了多种特征点匹配算法,如基于描述子的匹配算法、基于相似性变换的匹配算法等。
通过计算特征点之间的相似性,确定它们之间的对应关系。
3. 相机标定特征点匹配完成后,即可进行相机的标定。
Halcon提供了基于特征点的标定方法,通过求解相机的内部参数和外部参数,得到相机的准确标定结果。
标定过程中需要提供已知的标定板,通过测量标定板上的特征点坐标和图像中对应特征点的像素坐标,计算相机的内部参数和外部参数。
4. 标定结果评估标定过程完成后,需要对标定结果进行评估。
Halcon提供了多种评估方法,如重投影误差、畸变系数等。
通过对比实际观测值和标定结果的差异,评估标定的准确性和精度。
5. 标定结果应用标定结果可以应用于各种机器视觉应用中,如图像校正、目标检测和跟踪等。
通过应用标定结果,可以提高图像处理和机器视觉算法的准确性和稳定性。
总结:Halcon的自标定方法是一种简便高效的相机标定方法,通过特征点提取和匹配,求解相机的内部参数和外部参数,从而实现对相机的准确标定。
标定结果可以应用于各种机器视觉应用中,提高图像处理和算法的准确性和稳定性。
halcon九点标定例程

halcon九点标定例程【原创版】目录1.介绍 halcon 九点标定例程2.详述 halcon 九点标定的具体步骤3.分析 halcon 九点标定的优点与不足4.总结 halcon 九点标定例程的重要性正文一、介绍 halcon 九点标定例程Halcon 九点标定例程是工业自动化领域中常用的一种标定方法,主要用于精确测量物体的尺寸和位置。
该方法通过在一个平面上选取九个特征点,然后利用特定的算法对这些特征点进行处理,从而实现对物体的精确测量。
这种方法具有操作简便、精度高、抗干扰能力强等优点,因此在工业生产中得到了广泛的应用。
二、详述 halcon 九点标定的具体步骤1.准备工作:首先,需要确保相机、光源等硬件设备已经正确安装并正常运行。
此外,还需要选择合适的标定板(通常为正方形,上面印有九个特征点),并将其放置在相机可拍摄的范围内。
2.拍摄照片:在确保标定板放置正确的情况下,启动相机拍摄包含九个特征点的照片。
需要注意的是,拍摄时需要保证光线充足、照片清晰,以确保后续处理效果。
3.特征点提取:通过图像处理软件(如 Halcon)对拍摄到的照片进行处理,提取出九个特征点。
这一步通常包括边缘检测、轮廓提取、特征点筛选等操作。
4.建立坐标系:在照片上选取一个点作为原点,然后利用相机的内参数(如焦距、像素尺寸等)和已知的物距(即特征点到相机的距离),计算出其他特征点在三维空间中的坐标。
这样,就建立了一个以原点为基准的二维坐标系。
5.计算相机参数:通过九点标定算法,计算出相机的外参数(如旋转矩阵、平移矩阵等),从而实现对物体在三维空间中的精确定位。
三、分析 halcon 九点标定的优点与不足1.优点:(1)操作简便:九点标定方法所需设备和操作步骤较为简单,易于上手。
(2)精度高:该方法利用多个特征点进行标定,提高了测量的精度和可靠性。
(3)抗干扰能力强:九点标定方法对光照、摄像头晃动等干扰因素具有较强的抗干扰能力。
halcon标定例子
halcon标定例子Halcon标定是一种用于机器视觉系统中相机和图像采集设备的校准方法。
通过标定,可以获得相机的内部参数和外部参数,从而提高图像处理和计算机视觉系统的精度和稳定性。
下面是十个关于Halcon标定的例子:1. Halcon标定的基本原理Halcon标定是通过采集一系列已知位置和姿态的标定板图像,从而计算出相机的内部参数和外部参数。
这些参数可以用于图像校正、三维重建等应用。
2. Halcon标定的步骤Halcon标定的主要步骤包括:选择标定板、采集标定图像、提取标定板角点、计算相机参数、优化标定结果等。
3. Halcon标定的精度评估Halcon标定的精度可以通过重投影误差来评估,即将标定板上的角点投影到图像上,然后计算投影点与实际角点之间的距离。
4. Halcon标定的误差来源Halcon标定的误差来源主要包括相机畸变、标定板姿态误差、标定板角点检测误差等。
这些误差会影响标定结果的精度。
5. Halcon标定的应用场景Halcon标定广泛应用于机器视觉系统中的目标检测、定位、测量等任务。
通过标定,可以提高系统的测量精度和稳定性。
6. Halcon标定的优化方法Halcon标定可以通过优化算法来提高标定结果的精度。
常用的优化方法包括非线性最小二乘法、Bundle Adjustment等。
7. Halcon标定的注意事项在进行Halcon标定时,需要注意选择合适的标定板、保证标定板的平整度、正确设置相机参数等。
8. Halcon标定的挑战和解决方案Halcon标定在实际应用中可能面临光照变化、相机运动等挑战。
针对这些问题,可以采用多视角标定、动态标定等方法来解决。
9. Halcon标定的未来发展趋势随着机器视觉技术的不断发展,Halcon标定也在不断演进。
未来的发展趋势包括更精确的标定方法、更高效的标定算法等。
10. Halcon标定的局限性虽然Halcon标定可以提高机器视觉系统的精度和稳定性,但仍然存在一些局限性,如对标定板的要求较高、对标定图像的要求较严格等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Halcon标定文件的生成Halcon标定文件的生成图一Halcon标定文件的生成,需要有以下几个步骤:1.创建一个标定数据模板,由create_calib_data算来完成。
2.指定相机的类型,初始化相机内部参数,由set_calib_data_cam_param算子来完成。
3.指定标定板的描述文件,由set_calib_data_calib_object算子完成。
4.收集观察数据,有算子set_calib_data_observ_points完成。
也就是收集标定板上圆点的中心坐标,跟各个校正板的位置姿态。
5.配置校正过程。
由算子set_calib_data完成。
6.将数据整合进行标定计算。
calibrate_cameras7.获得标定参数。
get_calib_data8.记录标定参数,write_cam_parStartCamPar :=[0.016, 0, 0.0000074, 0.0000074, 326, 247, 652,494]解释一下这个数组的意思。
面阵相机有14或18个参数(根据想相机的畸变模式),对于线阵相机有17个参数。
这些参数可以分开为内部相机参数、外部相机参数。
面阵相机(division模式):Focus(焦距):远焦镜头镜头焦距的长度Kappa:扭曲系数Sx,Sy:两像素间距Cx,Cy:中心点坐标Whith,Height:图像的宽高面阵相机(polynomia模式):Focus(焦距):远焦镜头镜头焦距的长度K1, K2, K3, P1,P2:扭曲系数Sx,Sy:两像素间距Cx,Cy:中心点坐标Whith,Height:图像的宽高线阵相机不做具体介绍Halcon标定板规格2011-12-23 12:56 68人阅读评论(1) 收藏举报图一:30*30 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 30mm*30mm内边框长度: 28.125mm*28.125mm 即:黑色边框线宽为一个圆点半径(0.9375)黑色圆点半径: 0.9375mm圆点中心间距: 3.75mm裁剪宽度: 30.75mm*30.75mm 即:由黑色边框向外延伸0.375mm 边角:由黑色外边框向内缩进一个中心边距的长度40*40 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 40mm*40mm内边框长度: 37.5mm*37.5mm 即:黑色边框线宽为一个圆点半径(0.125)黑色圆点半径: 0.125mm圆点中心间距: 5mm裁剪宽度: 21mm*21mm 即:由黑色边框向外延伸0.5mm边角:由黑色外边框向内缩进一个中心边距的长度50*50 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 50mm*50mm内边框长度: 46.875mm*46.875mm 即:黑色边框线宽为一个圆点半径(1.5625)黑色圆点半径: 1.5625mm圆点中心间距: 6.25mm裁剪宽度: 51.25mm*51.25mm 即:由黑色边框向外延伸0.625mm 边角:由黑色外边框向内缩进一个中心边距的长度60*60 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 60mm*60mm内边框长度: 56.25mm*56.25mm 即:黑色边框线宽为一个圆点半径(1.875)黑色圆点半径: 1.875mm圆点中心间距: 7.5mm裁剪宽度: 61.5mm*61.5mm 即:由黑色边框向外延伸0.75mm边角:由黑色外边框向内缩进一个中心边距的长度Halcon如何制作标定板分类:Halcon 2011-12-23 12:51 151人阅读评论(2) 收藏举报图1上图即为我自行制作的标定板的图样。
下面我具体介绍一下,如何制作halcon的标准标定板方法一:用halcon软件自动生成的.ps文件来制作标定板。
这个也是最简单有效的方法。
打开halcon 的HDevelop软件,调用算子:gen_caltab( : : XNum,YNum,MarkDist,DiameterRatio,CalTabDescrFile,CalTabPSFile: )XNum每行黑色标志圆点的数量。
YNum每列黑色标志圆点的数量。
MarkDist两个就近黑色圆点中心之间的距离。
DiameterRatio黑色圆点半径与圆点中心距离的比值。
CalTabDescrFile标定板描述文件的文件路径(.descr)。
CalTabPSFile标定板图像文件的文件路径(.ps),如图1然后复位(F2),点击运行(F5)通过软件Gsview打开,按1:1比例打印,OK!备注一个30*30的标准标定板的halcon源代码。
gen_caltab(7,7,0.00375,0.5,'F:/halcon程序/gencaltab/30_30.descr','F:/halcon程序/gencaltab/40_40.ps')规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 30mm*30mm内边框长度: 28.125mm*28.125mm 即:黑色边框线宽为一个圆点半径(0.9375)黑色圆点半径: 0.9375mm圆点中心间距: 3.75mm裁剪宽度: 30.75mm*30.75mm 即:由黑色边框向外延伸0.375mm边角:由黑色外边框向内缩进一个中心边距的长度方法二:用halcon软件自动生成的.descr文件来制作标定板。
打开halcon 的HDevelop软件,调用算子:gen_caltab生成一个.descr的文件,用写字板打开(注意要用写字板,记事本打开会有一些数据不可见,一般windowsXP在C:\Program Files\Windows NT\Accessories就有写字板软件wordpad.exe)打开后的文件基本如下:以40*40为例:# Plate Description Version 2# HALCON Version 10.0 -- Mon Dec 19 11:08:07 2011# Description of the standard calibration plate 标准标定板的描述# used for the CCD camera calibration in HALCON# (generated by gen_caltab) (由)gen_caltab算子生成### 7 rows x 7 columns 7行*7列# Width, height of calibration plate [meter]: 0.04, 0.04标定板的宽和高:0.04米,0.04米# Distance between mark centers [meter]: 0.005标志圆点中心间距:0.005米# Number of marks in y-dimension (rows)r 7Y方向标志圆点的数量。
# Number of marks in x-dimension (columns)c 7X方向标志圆点的数量。
# offset of coordinate system in z-dimension [meter] (optional):z 0Z坐标偏移# Rectangular border (rim and black frame) of calibration plate标定板的矩形边框(边缘和黑色边框)# rim of the calibration plate (min x, max y, max x, min y) [meter]:o -0.0205 0.0205 0.0205 -0.0205标定板的剪切边缘【-0.0205 0.0205 0.0205 -0.0205】(以标定板中心为坐标圆点)# outer border of the black frame (min x, max y, max x, min y) [meter]: i -0.02 0.02 0.02 -0.02黑色边框的外边缘【-0.02 0.02 0.02 -0.02】# triangular corner mark given by two corner points (x,y, x,y) [meter] # (optional):t -0.02 -0.015 -0.015 -0.02三角形标志【-0.02 -0.015 -0.015 -0.02】# width of the black frame [meter]:w 0.00125黑色边框线的宽度:0.00125米。
# calibration marks: x y radius [meter]一下是各个矫正板黑色圆点在标定板上的坐标(共7*7个)# calibration marks at y = -0.015 m-0.015 -0.015 0.00125-0.01 -0.015 0.00125-0.005 -0.015 0.001250 -0.015 0.001250.005 -0.015 0.001250.01 -0.015 0.001250.015 -0.015 0.00125# calibration marks at y = -0.01 m-0.015 -0.01 0.00125-0.01 -0.01 0.00125-0.005 -0.01 0.001250 -0.01 0.001250.005 -0.01 0.001250.01 -0.01 0.001250.015 -0.01 0.00125# calibration marks at y = -0.005 m -0.015 -0.005 0.00125-0.01 -0.005 0.00125-0.005 -0.005 0.001250 -0.005 0.001250.005 -0.005 0.001250.01 -0.005 0.001250.015 -0.005 0.00125# calibration marks at y = 0 m-0.015 0 0.00125-0.01 0 0.00125-0.005 0 0.001250 0 0.001250.005 0 0.001250.01 0 0.001250.015 0 0.00125# calibration marks at y = 0.005 m -0.015 0.005 0.00125-0.01 0.005 0.00125-0.005 0.005 0.001250 0.005 0.001250.005 0.005 0.001250.01 0.005 0.001250.015 0.005 0.00125# calibration marks at y = 0.01 m -0.015 0.01 0.00125-0.01 0.01 0.00125-0.005 0.01 0.001250 0.01 0.001250.005 0.01 0.001250.01 0.01 0.001250.015 0.01 0.00125# calibration marks at y = 0.015 m -0.015 0.015 0.00125-0.01 0.015 0.00125-0.005 0.015 0.001250 0.015 0.001250.005 0.015 0.001250.01 0.015 0.001250.015 0.015 0.00125标定板的材料也有一定的要求,请参看《如何进行图形校正》。