Halcon学习(十八)如何制作标定板
Halcon标定板制作

Halcon标定板
什么是Halcon
Halcon是来自德国的一款图像处理软件,在世界范围内广泛使用的机器视觉软件。
是公认的、具有最佳效果的一种图像处理软件。
它源自学术界,有别于市面上一般的商用软件包,事实上这一套软件是由一千多个各自独立的函数,以及底层的数据管理核心构成。
其中包含了各类滤波,色彩以及几何、数学转换,型态学计算分析、校正,分类辨识。
halcon的应用范围几乎没有限制,涵盖医学,遥感探测,监控,到工业上的各类自动化检测。
促成了高科技业,电子业产能的大幅提升。
也是机器视觉用的最多的一种软件。
如何制作Halcon标定板?
以63*63mm的规格举例:
黑色圆点行数:7
黑色圆点列数:7
外边框长度:63mm*63mm
内边框长度:59.0625mm*59.0625mm
即:黑色边框线为一个圆点半径(3.9375)
黑色圆点半径: 3.9375mm
圆点中心间距:7.875mm
裁剪宽度63.875mm*63.875mm
即:由黑色边框向外延伸0.875mm
边角:由黑色外边框向内缩进一个中心边距的长度(7.875mm)
这个就是halcon标定描述文件生成的一个的标定板规格。
Halcon标定板的中心距就是外形尺寸
桂庆光电粟工135-49414687。
halcon相机标定和测量示例
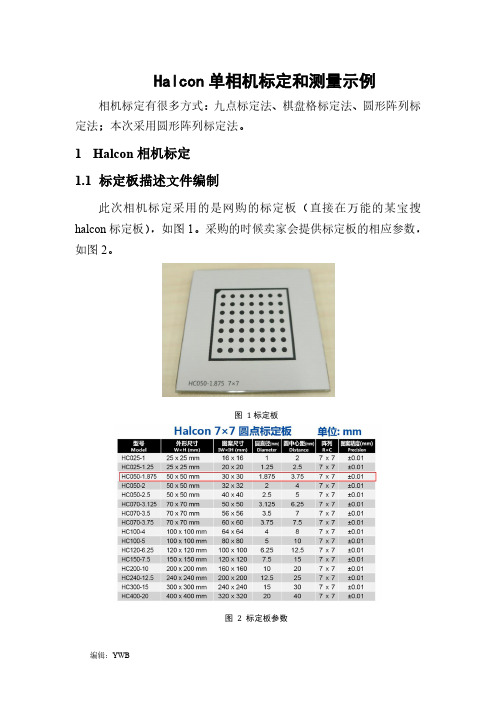
Halcon单相机标定和测量示例相机标定有很多方式:九点标定法、棋盘格标定法、圆形阵列标定法;本次采用圆形阵列标定法。
1Halcon相机标定1.1标定板描述文件编制此次相机标定采用的是网购的标定板(直接在万能的某宝搜halcon标定板),如图1。
采购的时候卖家会提供标定板的相应参数,如图2。
图1标定板图 2 标定板参数用halcon标定助手标定的时候需要用到标定板的描述文件,此文件可以用gen_caltab算子自己编制。
如下为函数说明:gen_caltab( : : XNum, YNum, MarkDist, DiameterRatio, CalPlateDescr, CalPlatePSFile : ) 函数说明:创建一个标定文件和相应的脚本文件。
函数参数:Xnum:输入X方向标记(圆点)的数量,Xnum>1;Ynum:输入Y方向标记(圆点)的数量,Ynum>1;MarkDist:标记圆圆心间距离,单位“m”;(我看过一个资料翻译为标记点大小,差点被坑死)DiameterRatio:两标记点距离和标记直径的比值,默认:0.5。
0<DiameterRatio<1.0;CalPlateDescr:输入要保存的标定文件(此文件保存路径在算子窗口可更改),默认值: 'caltab.descr',参考: 'caltab.descr', 'caltab_100mm.descr', 'caltab_10mm.descr', 'caltab_200mm.descr', 'caltab_30mm.descr';CalPlatePSFile :标定板图像文件的文件路径(此文件保存路径在算子窗口可更改),默认: 'caltab.ps',后缀:ps。
此算子“XNum, YNum, MarkDist, DiameterRatio”这四个参数根据图2所示的标定板参数设置。
halcon单相机标定详细说明

XYZ
方向平移和旋转标定板,采集 18 张图像
图 9 Halcon 三维标定采集图像示例
3、Halcon 的二维标定,只在 XY 平面内平移和旋转标定板,采集 影响提高标定精度
18 张图像,减小 Z 的
实验数据:
方法一 方法二 方法三
图像坐标 X 方向像素物理距离 15.5618um 15.7575um
,
这就使得主点不一定在图像的帧存中心 ,故需要标定 ,,的值。
单个像元的高宽 ????,????,该数据可以在制造商提供的技术文档中查到,但是该数据不是 完全准确的。 单个像元的高宽理论上应该是相等的, 但是由于制造的误差, 两者不可能完全
相等,因此需要根据实际情况对其进行修正。
透镜的畸变失真系数前面讲到理想的透镜成像才满足线性关系
征点提取的算法了。 Halcon 的标定板如图 5 所示,黑色的边框中有阵列分布的原点,在边 框的左上角有个小三角用来确定其旋转的位置。
以 30*30mm 的标定板为例:
黑色原点: 7*7 边框长度: 30*30mm 内边框长度: 28.125mm*28.125mm 黑色原点半径: 0.9375mm 原点中心间距: 3.75mm 裁剪宽度: 30.75*30.75mm
针孔模型是理想透镜的成像模型,但是实际中相机的透镜不可能是理想的模型,透镜形
状的非理想特征造成像点会沿径向发生畸变。一个像点沿径向内缩叫负畸变
,或桶形畸变沿
径向外延叫正畸变 ,或枕形畸变。这种崎变相对于光轴严格对称的
,也是畸变的主要分量 [2] 。
( X u ,Y u)为矫正后的坐标, (X d ,Y d)是受到镜头失真影响而偏移的像平面坐标,径向 径向畸变模型:
标定的方法从原理上主要分为三大类:线性标定、非线性标定和二次标定。 使用的标定板有棋盘格也有原点阵列,如图 4 所示。
Halcon标定文件资料地生成及标定板规格
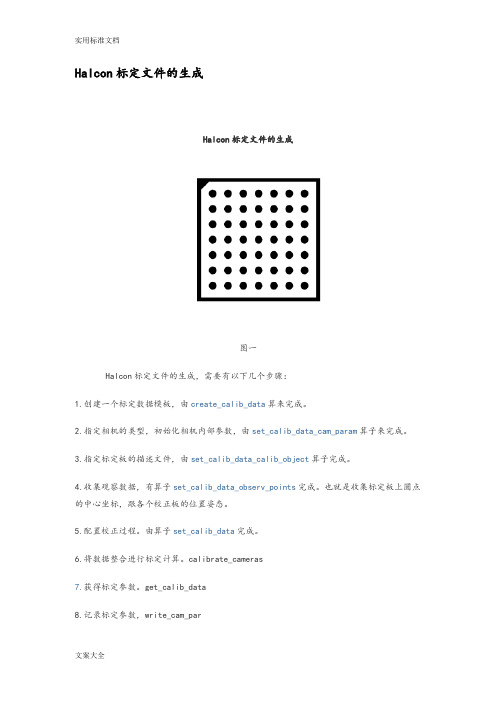
Halcon标定文件的生成Halcon标定文件的生成图一Halcon标定文件的生成,需要有以下几个步骤:1.创建一个标定数据模板,由create_calib_data算来完成。
2.指定相机的类型,初始化相机内部参数,由set_calib_data_cam_param算子来完成。
3.指定标定板的描述文件,由set_calib_data_calib_object算子完成。
4.收集观察数据,有算子set_calib_data_observ_points完成。
也就是收集标定板上圆点的中心坐标,跟各个校正板的位置姿态。
5.配置校正过程。
由算子set_calib_data完成。
6.将数据整合进行标定计算。
calibrate_cameras7.获得标定参数。
get_calib_data8.记录标定参数,write_cam_parStartCamPar :=[0.016, 0, 0.0000074, 0.0000074, 326, 247, 652,494]解释一下这个数组的意思。
面阵相机有14或18个参数(根据想相机的畸变模式),对于线阵相机有17个参数。
这些参数可以分开为内部相机参数、外部相机参数。
面阵相机(division模式):Focus(焦距):远焦镜头镜头焦距的长度Kappa:扭曲系数Sx,Sy:两像素间距Cx,Cy:中心点坐标Whith,Height:图像的宽高面阵相机(polynomia模式):Focus(焦距):远焦镜头镜头焦距的长度K1, K2, K3, P1,P2:扭曲系数Sx,Sy:两像素间距Cx,Cy:中心点坐标Whith,Height:图像的宽高线阵相机不做具体介绍Halcon标定板规格2011-12-23 12:56 68人阅读评论(1) 收藏举报图一:30*30 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 30mm*30mm内边框长度: 28.125mm*28.125mm 即:黑色边框线宽为一个圆点半径(0.9375)黑色圆点半径: 0.9375mm圆点中心间距: 3.75mm裁剪宽度: 30.75mm*30.75mm 即:由黑色边框向外延伸0.375mm 边角:由黑色外边框向内缩进一个中心边距的长度40*40 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 40mm*40mm内边框长度: 37.5mm*37.5mm 即:黑色边框线宽为一个圆点半径(0.125)黑色圆点半径: 0.125mm圆点中心间距: 5mm裁剪宽度: 21mm*21mm 即:由黑色边框向外延伸0.5mm边角:由黑色外边框向内缩进一个中心边距的长度50*50 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 50mm*50mm内边框长度: 46.875mm*46.875mm 即:黑色边框线宽为一个圆点半径(1.5625)黑色圆点半径: 1.5625mm圆点中心间距: 6.25mm裁剪宽度: 51.25mm*51.25mm 即:由黑色边框向外延伸0.625mm 边角:由黑色外边框向内缩进一个中心边距的长度60*60 规格的标定板的规格黑色圆点行数: 7黑色圆点列数: 7外边框长度: 60mm*60mm内边框长度: 56.25mm*56.25mm 即:黑色边框线宽为一个圆点半径(1.875)黑色圆点半径: 1.875mm圆点中心间距: 7.5mm裁剪宽度: 61.5mm*61.5mm 即:由黑色边框向外延伸0.75mm边角:由黑色外边框向内缩进一个中心边距的长度Halcon如何制作标定板分类:Halcon 2011-12-23 12:51 151人阅读评论(2) 收藏举报图1上图即为我自行制作的标定板的图样。
Halcon標定文件的生成

Halcon標定⽂件的⽣成
Halcon標定⽂件的⽣成
圖⼀
Halcon標定⽂件的⽣成,需要有以下幾個步驟:
1.創建⼀個標定數據模板,由算來完成。
2.指定相機的類型,初始化相機內部參數,由算⼦來完成。
3.指定標定板的描述⽂件,由算⼦完成。
4.收集觀察數據,有算⼦完成。
也就是收集標定板上圓點的中⼼坐標,跟各個校正板的位置姿態。
5.配置校正過程。
由算⼦完成。
6.將數據整合進⾏標定計算。
calibrate_cameras
7.獲得標定參數。
get_calib_data
8.記錄標定參數,write_cam_par
StartCamPar := [0.016, 0, 0.0000074, 0.0000074, 326, 247, 652, 494]
解釋⼀下這個數組的意思。
⾯陣相機有14或18個參數(根據想相機的畸變模式),對於線陣相機有17個參數。
這些參數可以分開為內部相機參數、外部相機參數。
⾯陣相機(division模式):
Focus(焦距):遠焦鏡頭鏡頭焦距的⾧度
Kappa:扭曲系數
Sx,Sy:兩像素間距
Cx,Cy:中⼼點坐標
Whith,Height:圖像的寬⾼
⾯陣相機(polynomia模式):
Focus(焦距):遠焦鏡頭鏡頭焦距的⾧度
K1, K2, K3, P1,P2:扭曲系數
Sx,Sy:兩像素間距
Cx,Cy:中⼼點坐標
Whith,Height:圖像的寬⾼。
halcon九点标定例程

halcon九点标定例程【原创版】目录1.介绍 halcon 九点标定例程2.详述 halcon 九点标定的具体步骤3.分析 halcon 九点标定的优点与不足4.总结 halcon 九点标定例程的重要性正文一、介绍 halcon 九点标定例程Halcon 九点标定例程是工业自动化领域中常用的一种标定方法,主要用于精确测量物体的尺寸和位置。
该方法通过在一个平面上选取九个特征点,然后利用特定的算法对这些特征点进行处理,从而实现对物体的精确测量。
这种方法具有操作简便、精度高、抗干扰能力强等优点,因此在工业生产中得到了广泛的应用。
二、详述 halcon 九点标定的具体步骤1.准备工作:首先,需要确保相机、光源等硬件设备已经正确安装并正常运行。
此外,还需要选择合适的标定板(通常为正方形,上面印有九个特征点),并将其放置在相机可拍摄的范围内。
2.拍摄照片:在确保标定板放置正确的情况下,启动相机拍摄包含九个特征点的照片。
需要注意的是,拍摄时需要保证光线充足、照片清晰,以确保后续处理效果。
3.特征点提取:通过图像处理软件(如 Halcon)对拍摄到的照片进行处理,提取出九个特征点。
这一步通常包括边缘检测、轮廓提取、特征点筛选等操作。
4.建立坐标系:在照片上选取一个点作为原点,然后利用相机的内参数(如焦距、像素尺寸等)和已知的物距(即特征点到相机的距离),计算出其他特征点在三维空间中的坐标。
这样,就建立了一个以原点为基准的二维坐标系。
5.计算相机参数:通过九点标定算法,计算出相机的外参数(如旋转矩阵、平移矩阵等),从而实现对物体在三维空间中的精确定位。
三、分析 halcon 九点标定的优点与不足1.优点:(1)操作简便:九点标定方法所需设备和操作步骤较为简单,易于上手。
(2)精度高:该方法利用多个特征点进行标定,提高了测量的精度和可靠性。
(3)抗干扰能力强:九点标定方法对光照、摄像头晃动等干扰因素具有较强的抗干扰能力。
halcon摄像机标定

基于HALCON的双目立体视觉系统实现摘要双目立体视觉的研究一直是机器视觉中的热点和难点。
使用双目立体视觉系统可以确定任意物体的三维轮廓,并且可以得到轮廓上任意点的三维坐标。
因此双目立体视觉系统可以应用在多个领域。
本文将主要介绍如何基于HALCON实现双目立体视觉系统,以及立体视觉的基本理论、方法和相关技术,为搭建双目立体视觉系统和提高算法效率提供了参考。
关键词双目视觉三维重建立体匹配摄像机标定视差双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法。
双目立体视觉系统一般由双摄像机从不同角度同时获得被测物的两幅数字图像,或由单摄像机在不同时刻从不同角度获得被测物的两幅数字图像,并基于视差原理恢复出物体三维几何信息,重建物体三维轮廓及位置。
双目立体视觉系统在机器视觉领域有着广泛的应用前景。
HALCON是在世界范围内广泛使用的机器视觉软件。
它拥有满足您各类机器视觉应用需求的完善的开发库。
HALCON也包含Blob分析、形态学、模式识别、测量、三维摄像机定标、双目立体视觉等杰出的高级算法。
HALCON支持Linux和Windows,并且可以通过C、C++、C#、Visual Basic和Delphi语言访问。
另外HALCON与硬件无关,支持大多数图像采集卡及带有DirectShow和IEEE 1394驱动的采集设备,用户可以利用其开放式结构快速开发图像处理和机器视觉应用软件。
一.双目立体视觉相关基本理论介绍1.1 双目立体视觉原理双目立体视觉三维测量是基于视差原理,图1所示为简单的平视双目立体成像原理图,两摄像机的投影中心的连线的距离,即基线距为b。
摄像机坐标系的原点在摄像机镜头的光心处,坐标系如图1所示。
事实上摄像机的成像平面在镜头的光心后,图1中将左右成像平面绘制在镜头的光心前f处,这个虚拟的图像平面坐标系O1uv的u轴和v轴与和摄像机坐标系的x轴和y轴方向一致,这样可以简化计算过程。
halcon标定详解

*创建标定板gen_caltab(7,7,0.008,0.5,'48_48mm.descr','48_48mm.ps')*=======标定内参dev_close_window ()dev_open_window (0, 0, 652, 494, 'black', WindowHandle)dev_update_off ()dev_set_draw ('margin')dev_set_line_width (3)OpSystem := environment('OS')set_display_font (WindowHandle, 14, 'mono', 'true', 'false')*标定相机StartCamPar := [0.0,0.0,0.0000299,0.0000299,4896/2,3264/2,4896,3264] create_calib_data ('calibration_object', 1, 1, CalibDataID)set_calib_data_cam_param (CalibDataID, 0, 'area_scan_telecentric_divi sion', StartCamPar)set_calib_data_calib_object (CalibDataID, 0, '48_48mm.descr')* Note, we do not use the image from which the pose of the measuremen t plane can be derivedfor index := 1 to 13 by 1read_image (Image, '标定20/' + index + '.png')get_image_size(Image, Width, Height)dev_display (Image)find_calib_object (Image, CalibDataID, 0, 0, index, [], [])get_calib_data_observ_contours (Caltab, CalibDataID, 'caltab', 0, 0, index)dev_set_color ('green')dev_display (Caltab)endforcalibrate_cameras (CalibDataID, Error)get_calib_data (CalibDataID, 'camera', 0, 'params', CamParam)get_calib_data (CalibDataID, 'calib_obj_pose', [0,1], 'pose', PoseCal ib)*输出计算的相机内参write_cam_par (CamParam, 'camera_parameters.dat')Message:= '相机内参已经写入文件中'disp_message (WindowHandle, Message, 'window', 12, 12, 'red', 'false ')clear_calib_data (CalibDataID)stop()*=====标定外参dev_set_draw ('margin')dev_set_line_width (1)set_display_font (WindowHandle, 14, 'mono', 'true', 'false')*从文件中读取内参存储文件:camera_parameters.dattryread_cam_par ('camera_parameters.dat', CamParam)catch (Exception)stop ()endtry*开始计算open_file('data.csv','output', FileHandle)fwrite_string(FileHandle,'Dis_pix*0.0299204,Dis_m*1000,Distance')fnew_line (FileHandle)close_file(FileHandle)*选择一张作为标定作为最终标定位姿(任意一张都可以)index:=1read_image (Image,'标定20/'+index+'.png')dev_display (Image)CaltabName := '48_48mm.descr'create_calib_data ('calibration_object', 1, 1, CalibDataID)* Here, the final camera parameters are already known and can be used instead* of the starting values used in the program 'camera_calibration_inte rnal.hdev'set_calib_data_cam_param (CalibDataID, 0, 'area_scan_telecentric_divi sion', CamParam)set_calib_data_calib_object (CalibDataID, 0, CaltabName)find_calib_object (Image, CalibDataID, 0, 0, 1, [], [])get_calib_data_observ_contours (Caltab, CalibDataID, 'caltab', 0, 0, 1)get_calib_data_observ_points (CalibDataID, 0, 0, 1, RCoord, CCoord, I ndex, PoseForCalibrationPlate)dev_set_color ('green')dev_display (Caltab)dev_set_color ('red')disp_caltab (WindowHandle, CaltabName, CamParam, PoseForCalibrationPl ate, 1)dev_set_line_width (1)disp_circle (WindowHandle, RCoord, CCoord, gen_tuple_const(|RCoord|,1.5))* caltab_points (CaltabName, X, Y, Z)* calibrate_cameras (CalibDataID, Error)* To take the thickness of the calibration plate into account, the z-value* of the origin given by the camera pose has to be translated by the * thickness of the calibration plate.* Deactivate the following line if you do not want to add the correct ion.set_origin_pose (PoseForCalibrationPlate, 0, 0, 0, PoseCalib)* disp_continue_message (WindowHandle, 'black', 'true')* stop ()*像素距离distance_pp(RCoord[0],CCoord[0],RCoord[48],CCoord[48], Dis_pix)*像素直接转换mm然后计算pix2mm(RCoord, CCoord,CamParam[2],CamParam[3],newCol,newRow)distance_pp(newRow[0],newCol[0],newRow[48],newCol[48], Dis_m)*用同一个世界坐标系来计算image_points_to_world_plane(CamParam, PoseCalib,[RCoord[0],RCoord[4 8]], [CCoord[0],CCoord[48]], 'mm', X1, Y1)distance_pp(Y1[0],X1[0],Y1[1],X1[1],Distance)*输出计算结果比较open_file('data.csv','append', FileHandle)fwrite_string(FileHandle, Dis_pix*0.0299+','+Dis_m*1000+','+Distance+ '\n')close_file(FileHandle)Message:= '计算完毕'disp_message (WindowHandle, Message, 'window', 12, 12, 'red', 'false ')stop()。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MarkDist 的距离。
两个就近黑色圆点中心之间Halcon 学习(十八)如何制作标定板
下面我具体介绍一下,如何制作halcon 的标准标定板方法一:用halcon 软件自动生成的.ps 文件来制作标定板。
这个也是最简单有效的方法。
打开halcon
的HDevelop 软件,调用算子:
gen_caltab( : :
XNum,YNum,MarkDist,DiameterRatio,CalTabDescrFile,CalTa bPSFile :
)
XNum 每行黑色标志圆点的数量。
YNum 每列黑色标志圆点的数量。
DiameterRatio 黑色圆点半径与圆点中心距离的比值。
CalTabDescrFile 标定板描述文件的文件路径(.descr)。
CalTabPSFile 标定板图像文件的文件路径
(.ps),如图1
然后复位(F2),点击运行(F5)通过软件Gsview打开,按1:1 比例打印,OK !
备注一个30*30 的标准标定板的halcon 源代码。
gen_caltab (7,7,0.00375,0.5,'F:/halcon 程序
/gencaltab/30_30.descr','F:/halcon 程序/gencaltab/40_40.ps')规格的标定板的规格
黑色圆点列数:7
黑色圆点行数:7
黑色圆点列数:7
外边框长度:30mm*30mm
内边框长度:28.125mm*28.125mm 即:黑色边框线宽为一个圆点半径(0.9375)
黑色圆点半径:0.9375mm
圆点中心间距: 3.75mm
裁剪宽度:30.75mm*30.75mm 即:由黑色
边框向外延伸0.375mm
边角:由黑色外边框向内缩进一个中心边
距的长度
方法二:用halcon 软件自动生成的.descr 文件来制作标定板。
打开halcon 的HDevelop 软件,调用算子:
gen_caltab 生成一个.descr 的文件,用写字板打开(注意要用写字板,记事本打开会有一些数据不可见,一般windowsXP
在C:\Program
Files\Windows NT\Accessories 就有写字板软件wordpad.exe ) 打开后的文件基本如下:
以40*40 为例:
# Plate Description Version 2
# HALCON Version 10.0
-- Mon Dec 19 11:08:07
2011
# Description of the standard calibration
plate 标准标定板的描述
# used for the CCD camera calibration in
HALCON
# (generated by gen_caltab) 生成
由) gen_caltab 算子#
# 7 rows x 7 columns 7 行*7 列
# Width, height of calibration plate [meter]: 0.04, 0.04 标定板的宽和高:0.04 米,0.04 米
# Distance between mark centers [meter]: 0.005
标志圆点中心间距:0.005 米
# Number of marks in y-dimension (rows)
r 7
Y 方向标志圆点的数量
# Number of marks in x-dimension (columns) c 7
X 方向标志圆点的数量。
# offset
of coordinate system in z-dimension [meter] (optional):
z 0
Z 坐标偏移
# Rectangular border (rim and black frame) of calibration plate 标定板的矩形边框(边缘和黑色边框)
# rim
of the calibration plate (min x, max y, max x, min y) [meter]: o -0.0205 0.0205 0.0205 -0.0205 标定板的剪切边缘【-0.0205 0.0205 0.0205 -0.0205 】(以标定板中心为坐标圆点)
# outer
border of the black frame (min x, max y, max x, min y) [meter]: i -0.02 0.02 0.02 -0.02
黑色边框的外边缘【-0.02 0.02 0.02 -0.02 】
# triangular
corner mark given by two corner points (x,y, x,y) [meter]
# (optional):
t -0.02 -0.015 -0.015 -0.02
三角形标志【-0.02 -0.015 -0.015 -0.02 】
# width
of the black frame [meter]:
w 0.00125
黑色边框线的宽度:0.00125 米。
# calibration marks: x y
radius [meter]
一下是各个矫正板黑色圆点在标定板上的坐标(共7*7 个)# calibration marks at y = -0.015 m
-0.015 -0.015 0.00125
-0.01 -0.015 0.00125
-0.005 -0.015 0.00125
0 -0.015 0.00125
0.5 -0.015 0.00125
0.01 -0.015 0.00125
0.015 -0.015 0.00125
# calibration marks at y = -0.01 m -0.015 -0.01 0.00125
-0.01 -0.01 0.00125
-0.005 -0.01 0.00125
0 -0.01 0.00125
0.005 -0.01 0.00125
0.01 -0.1 0.00125
0.015 -0.01 0.00125
# calibration marks at y = -0.005 m -0.015 -0.005 0.00125
-0.01 -0.005 0.00125
-0.005 -0.005 0.00125
0 -0.005 0.00125
0.005 -0.005 0.00125
0.01 -0.005 0.00125
0.015 -0.005 0.00125
# calibration marks at y = 0 m
-0.015 0 0.00125
-0.01 0 0.00125
-0.005 0 0.00125
0 0 0.00125
0.005 0 0.00125
0.01 0 0.00125
0.015 0 0.00125
# calibration marks at y = 0.005 m -0.015 0.005 0.00125
-0.01 0.005 0.00125
0 0.005 0.00125
0.005 0.005 0.00125
0.01 0.005 0.00125
0.015 0.005 0.00125
# calibration marks at y = 0.01 m -0.015 0.01 0.00125
-0.01 0.01 0.00125
-0.005 0.01 0.00125
0 0.01 0.00125
0.01 0.01 0.00125
0.015 0.01 0.00125
# calibration marks at y = 0.015 m -0.015 0.015 0.00125
-0.01 0.015 0.00125
-0.005 0.015 0.00125
0 0.015 0.00125
0.5 0.015 0.00125
0.01 0.015 0.00125。