两轮机器人自平衡研究(优质参照)
两轮同轴机器人的自平衡控制研究
个 惯 性 基 准 , 感 知 两 轮 同 轴 机 器 人 位 姿 和 倾 角 , 进 行 平 衡 协 调 ; 通 过 PI 调 节 和 卡 尔 曼 滤 波 , 实 现 机 器 人 轮 子 转 速 控 制 和 平 衡 杆 D
平 衡 控 制 PI 调 节 D
的平衡控制的有机 统一。 [ 键 词 ] 轮 同 轴 机 器 人 关 两
[ 图分 类 号] 中 TK4 2l
[ 献 标 识 码】 文 A
[ 章 编 号 】0 7 4l ( 0 0 0 -0 0 -0 文 1 0 -9 6 2 1 ) 7 l 5 2
1引言
目 前 现 有 的 机 器 人 或 短 距 离 运 输 工 具 都 以 四 轮 传 动 机 构 作 为 动 力 系 统 , 其 劣 势 在 于 系 统 的 占 地 面 积 较 大 、 行 动 不 够 灵 活 。 而 两 轮 同 轴 机 器 人 以 两 轮 同 轴 直 立 移 动 , 减 小 了 占 地 面 积 , 可 以 实 现 零 半 径 转 弯 的 运 动 , 移 动 灵 活 。 两 轮 同 轴 机 器 人 占 地 面 积 小 , 为 狭 小 危 险 空 间 下 进 行 数 据 采 集 或 现 场 勘 测 提 供 了 有 利
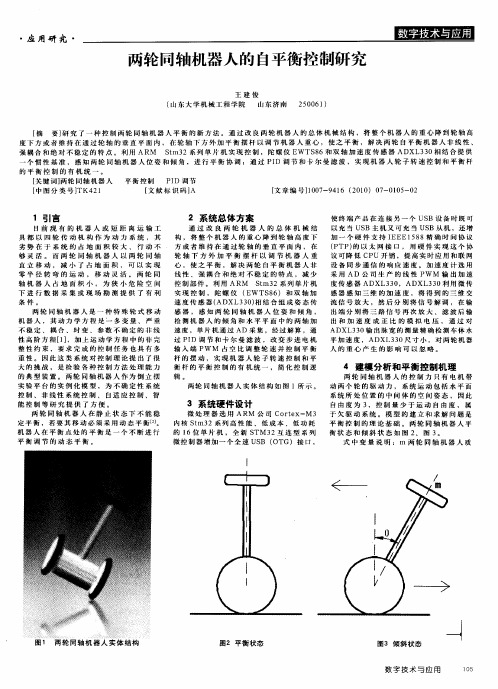
杆 的 摆 动 , 实 现 机 器 人 轮 子 转 速 控 制 和 平 衡 杆 的 平 衡 控 制 的 有 机 统 一 , 简 化 控 制 逻 辑。 两 轮 同 轴 机 器 人 实 体 结 构 如 图 l所 示 。
条件 。 两 轮 同 轴 机 器 人 是 一 种 特 殊 轮 式 移 动 机 器 人 , 其 动 力 学 方 程 是 多 变 量 、 严 重 不 稳 定 、 耦 合 、 时 变 、 参 数 不 确 定 的 非 线 性 高 阶 方 程 [ ] 加 上 运 动 学 方 程 中 的 非 完 1, 整 性 约 束 , 要 求 完 成 的 控 制 任 务 也 具 应 速 度 。 加 速 度 计 选 用 采 用 AD 公 司 生 产 的 线 性 PW M 输 出 加 速 度 传 感 器 ADXL3 0 ADXL3 0利 用 微 传 3, 3 感 器 感 知 三 维 的 加 速 度 , 将 得 到 的 三 维 交
两轮机器人自平衡研究ppt课件

车辆本身的自动平衡能力。以内置的
精密固态陀螺仪(Solid-State
Gyroscopes)来判断车身所处的姿势
状态,透过精密且高速的中央微处理
器计算出适当的指令后,驱动马达来
做到平衡的效果。如右图所. 示:
3
2、两轮自平衡车的运动
由于两轮自平衡电动车的两轮结构,使得它的重心 在上、支点在下,故在非控制状态(或静态)下为 一不稳定系统。然而,可以利用倒立摆系统的控制 原理,通过微处理器的控制使它能够如倒立摆一样 稳定在一个平衡位置处,并能在保持平衡的状态下 按照使用者的指令要求正常运行。两轮自平衡电动 车实际上是一级直线式倒立摆和旋转式倒立摆的结 合体,它的控制原理与倒立摆系统的基本一致。更 形象地说,自平衡电动车的工作原理更像人行走的 过程。
.
11
四、陀螺仪(gyroscope)
陀螺仪(gyroscope),是一种用来传感与维持方向 的装置,基于角动量守恒的理论设计出来的。陀螺 仪主要是由一个位于轴心且可旋转的轮子构成。 陀 螺仪一旦开始旋转,由于轮子的角动量,陀螺仪有 抗拒方向改变的趋向。陀螺仪多用于导航、定位等 系统。
.
12
1、陀螺仪的原理
.
15
五、两轮机器人姿态检测
两轮自平衡机器人所有的运动控制方式都以平衡控 制为前提。平衡控制是两轮自平衡机器人运动的关 键。两轮自平衡机器人在平衡控制的基础上,又对 机器人的轨迹跟踪控制进行了研究。提出了预测控 制的轨迹跟踪控制方法,对非完整轮式移动机器人 的轨迹跟踪问题进行了研究。预测控制在系统模型 的基础上采用先预测后控制,滚动优化,反馈校正 的方式进行控制,对位姿误差与轨迹误差进行估计, 实现了对预定轨迹的准确跟踪。
.
7
两轮机器人在坡面上的运动平衡控制

Mo t i o n ba l a nc e c o n t r o l o f t wo - wh e e l e d r o bo t o n s l o p e s
RUAN Xi a o — g a n g,LI Ya— l e i ,ZHU Xi a o — q i n g
0 引 言
制 。2 0 0 6年 , 韩 国的 K i m Y 运用 牛顿力 学 的方 法族 中的一员 , 两 轮机器 人 的平衡 问题类似 于倒立摆 的平衡 问题 , 不同的是 , 倒立摆 只能在二 维空间中运动 , 而两轮机 器人是 可 以在 三维空 间
4 4
传感器与微系统 ( T r a n s d u c e r a n d Mi c r o s y s t e m T e c h n o l o g i e s )
2 0 1 4年 第 3 3卷 第 3期
两 轮 机 器 人 在 坡 面 上 的运 动 平衡 控 制
阮晓钢 ,李亚磊 ,朱晓 庆
种非线性 P D控制器 。与传统的线性 P D控制器进行仿 真实验 对 比, 实验结 果说 明 : 在 响应 速度 、 稳定 性 、 鲁 棒性 方面 , 非线性 P D控制有着更好 的效果 。最后 , 在姿态平衡控制 中加入速度控制 , 构成双环 的 P D控
制, 实现 了两轮机器人在坡 面上 的静态平衡 。 关键词 :两轮机器人 ; 坡面; 动力学建模 ; 非线性 P D控制 中图分类号 :T P 2 4 2 . 6 文献标识码 :A 文章编号 :1 0 0 0 - 9 7 8 7 ( 2 0 1 4 ) 0 3 - 0 0 4 4 - 0 4
( I n s i t t u t e o f A r t i i f c i a l I n t e l l i g e n c e a n d Ro b o i t c s , B e i j i n g Un i v e r s i t y o f T e c h n o l o g y , B e i j i n g 1 0 0 1 2 4 , C h i n a )
两轮自平衡机器人的LQR和PID实验
用以在线学习两足机器人的平衡控制的CTRNN和BPTT算法的即时实现:站立姿态实验摘要:为了学习机器人控制规则,本文描述了CTRNN算法和BPTT算法的即时实现实验的结果。
实验的目的是为了控制一个两足步行机器人模型在站立姿态下保持平衡。
机器人通过神经控制器控制其关节运动来补偿外界扰动的影响。
在机器人的即时电子单元中嵌入程序算法。
同时,文中详细介绍了在线学习的实现。
最后,实验结果的学习行为和控制性能证明了所提方法的可行性和效率。
1、介绍随着技术的发展,人们得以将来自人体或动物形体的启发应用于机器人制作。
因此,最新的仿人机器人是一种集成了高端机械技术与电子技术的复杂系统。
这些机器人具有完整的感知系统,能够进行人机交互,且能够在人们的日常生活环境中运动。
如何控制机器人在行走或站立时的平衡是控制仿人机器人的一大难题。
解决这一问题的一种方法是根据零力矩点理论设计控制器;另一种方法是利用仿生控制器,即具备适应能力,且能够通过训练获得所需反应的方法。
为了能够了解如何“正确”控制机器人保持平衡,利用诸如神经网络等仿生架构是一个很有希望的途径。
为此,人们在过去提出了几个基于神经元控制器的设想。
其中,Albus(1975)在1975年提出的小脑模型关节控制器(CMAC)设想在控制腿式机器人领域仍为人们所研究。
近期的研究主要涉及CMAC的建模及其泛化性能(Horvath&Szabo,2007),或是CMAC与其他诸如模糊逻辑(Su,Lee&Wang,2006),计算力矩控制(Lin&Chen,2007)等的联系。
CMAC 已被应用于控制两足步行机器人的平衡(Kun&Miller,1996)、鲁棒动态行走仿真(Lin&Chen,2007)及两足步行机器人实验(Sabourin&Bruneau,2005)等领域。
多年以来,循环神经网络(即动态神经网络)在复杂系统的控制领域被广泛研究(Marcua,Köppen-Seligerb,&Stücher,2008;Song&Tahk,2001)。
自平衡两轮移动机器人的LQR控制策略研究

自平衡 两轮 移 动 机 器 人 是 一 种 类 似 于倒 立摆 的 轮 式 移 动 机 器 人 …, 垂 直 位 置 , 角 小 于41 。 , 近 似 为 线 性 系统 , 以 在 倾 -0 时 可 所 对 自平 衡 两 轮 移 动 机 器 人 的控 制 可 以 采 用 线 性 控 制 方 法 ] 由 。 于 该 机 器人 在控 制上 的复 杂 性 和技 术 实 现 上 的难 度 ,很 适 合 作 为 各 种 控 制 理论 和方 法 研 究 的 试 验 平 台 。 本 文设 计 的 自平 衡 两 轮 移 动 机 器 人 , 格 低 廉 , 部 自行 制 价 全
机 有 : 流 电 机 、 流元 刷 电 机 和 步 进 电机 , 着 设 计 成 本 低 , 直 直 ]本
作 , 以 进 行 各 种 创 新 性 实 验 , 有 很 好 的 理 论 研 究 价 值 , 是 可 具 也 个很 好 的 锻炼 动手 能 力 的平 台。 器 人 采 用 电 机 驱 动 , 般 由 机 一
模 的 合 理 有 效性 。
关 键词 : 自平 衡 机 器 人 , 学建 模 , 数 最优 控 制 器 , A L B仿 真 M TA
Ab tac sr t
T d PI 0F 11 he s C3 40 as he o to c p, e om e t c n r l hi t h h made tt e or en or, r s ope nd omemad moor i s ns s s sgy o c l a h e t en ode t c r o co po e t e m s h deecig y t m , ch ap wo— t t s s e t n he e t whe e sef eld l —bal cn an ig mobi r o s l ob t i desgn e i ed, qui s t o i t t ui t be e s an ex — per e t af r i n plto m o ar us onr l eh m fv i c to m todsAcc dig o t e obo pa a eer a d o i , oor o . or n t h r tS r m t s n m t m t mod , on el whe m o an el del d f war mo a e or d del r de i e dy m i l o a e sgn d, na ca m del r bula ob an h bal cn f war s sem sae pa e pr s in, i,nd t t i t e an ig or d y t S t t s ce x e so desgn t e QR tmalc tol r ge h xpe t baa ci r ut by i h L op i onr l , tt e e e ced ln ng es l s makn te i a i e er e t t MATL ig h smult on xp i n s wi m h AB. K wodss f al ci ob , a h m a ialm o ey r :el -b an ng r ot t e t del i n r l , ATL m c , malco tol M opt er AB Si ua in m lt o
两轮机器人自平衡行走控制系统设计
E L E C T R I C D R I V E 2 O 1 3 V o 1 . 4 3 N o . 1 2
两 轮 机 器人 白平 衡 行ห้องสมุดไป่ตู้ 控 制 系 统 设计
胡 凌燕 , 万鹏 , 刘小平, 徐 少平 , 徐刚 , 陈明伟 , 高青 ( 南 昌大学 信 息工程 学 院, 江西 南 昌 3 3 0 0 3 1 )
速度及倾角这两个耦合变量的控制 , 而且具有较强的抗干扰能力。该 控制方法还具备 了传统 P I D控制器不依 赖精确模型 、 实现简单 、 参数整定方便 、 鲁棒性强等优点。 关键词 : 两轮机器人 ;双 回路 P I D 控制 ;卡尔曼滤波 ; 平衡控制 中图分类号 : T P 1 3 文献标识码 : A
Ab s t r a c t : T wo - wh e e l e d r o b o t i s a mu l t i - v a r i a b l e , h i g h e r - o r d e r n o n — l i n e a r , s t r o n g c o u p l i n g s y s t e m. A n o v e l d o u b l e - l o o p P I D c o n t r o l me t h o d w a s p r e s e n t e d ,a n d t h e c o n t r o l s y s t e m f o r t h e t wo — w h e e l e d r o b o t w a s d e s i g n e d . T h e r e a l — t i me i n c l i n a t i o n o f r o b o t wa s me a s u r e d b y f u s i n g t h e g y r o s i g n a l wi t h a c c e l e r o me t e r s i g n a l wi t h a Ka lma n i f l t e in r g me t h o d . T h e s p e e d o f山e r o b o t wa s me a s u r e d wi t h e n c o d e  ̄. T h e d o u b l e l o o p P I D c o n t r o l l e r c o mb i n e d p o s i t i v e f e e d b a c k w i t h n e g a t i v e f e e d b a c k c o n t r o l l e r . T h e s u m o f i n c l i n a t i o n n e g a t i v e f e e d b a c k a n d s p e e d p o s i t i v e ̄e d b a e k we r e o u t p u t t o c o n t r o l t h e r o b o t b la a n c e a n d wa l k i n g wi t h a c e r t a i n e x p e c t e d s p e e d . Ac t u l a e x p e ime r n t s s h o w t h a t t h e d o u b l e - l o o p P I D c o n t r o l me t h o d c a n ma k e t wo — w h e e l e d r o b o t w a l k i n g s mo o t h i n a c c o r d a n c e w i t h t h e e x p e c t e d s p e e d a n d he t s y s t e m h a s a g o o d a n t i . i n t e f r e r e n c e p e f r o r ma n c e . T h e c o n t r o l me t h o d a l s o h a s t h e a d v a n t a g e s o f t r a d i t i o n l a P I D c o n t r o l l e r , wh i c h d o e s n o t r e l y o n a n a c c u r a t e mo d e l , e a s y t o i mp l e me n t a n d p a r a me t e r s e t t i n g ,a n d h a s s t r o n g r o b u s t n e s s . Ke y wo r d s : t w o — wh e e l e d;d o u b l e — l o o p P I D; Ka l ma n i f l t e r ;b la a n c e c o n t r o l
基于Accodometry法的两轮自平衡机器人位置估计研究
r b tp sto si a in i s l e .Th lefcso c ee o trih r n rf r l ia e .Th o i o o o i net i m t o v d o s ei -fe t fa c lr me e n e e td it eei n td l a m ep s—
Ke r s a cd mer t o ywo d : co o tymeh d;t owh ee efb ln e o o ;d t u in o i o si t n;o o er w - e lds l aa cd rb t aa fso ;p st n e t - i mai o d m ty
用 陆标 、 声纳等 绝对 定位 系统进 行外 部测 量 , 无界 对
的累积误差进行修正. 安装绝对定位系统将提高机
器 人 系统 的成本 , 此需 要 提 高 测 程法 与 传 感器 精 因 度 减少使 用绝 对定 位 系统 的密 度 和修 正 的 次数 , 提 高系统 响应 的实 时性 , 降低 成本提 高定 位精度 L ] 3.
两轮小车自平衡控制系统的研究与设计
两轮小车自平衡控制系统的研究与设计
随着传统交通工具带来的能源危机、交通拥堵、环境污染等问题日益凸显,人们对新型交通工具的需求日益迫切。
两轮自平衡小车体积小、方便携带,并且采用电池供电不会产生尾气,是现今交通运输领域研究的重点。
同时,两轮自平衡小车是动态稳定的系统,它有着强耦合、非线性、欠驱动、多变量的特点。
因此可以在两轮自平衡小车这个平台上对各种控制算法进行验证,具有一定的理论研究意义。
在两轮自平衡小车领域国内外研究现状的基础上,本文对小车的姿态角检测和自平衡控制进行了研究。
首先,采用牛顿力学原理对小车的车轮、车身和电机分别建立数学模型,并根据三者之间的关系建立小车整体系统的模型。
然后,对小车模型在平衡位置进行线性化,得到简化模型。
对简化的模型进行能观性和能控性分析并采用PID控制理论对小车系统设计平衡控制器。
小车的姿态角包括车身倾角和偏航角,它是小车控制器设计的重要变量,因此姿态角的准确性显得尤为重要。
在本文中使用四元数来描述姿态角,并且对微机电系统(MEMS)采集到的数据利用扩展卡尔曼滤波(EKF)原理进行融合,得到更为准确的姿态角。
最后,对小车各个模块选择相应的芯片,组装小车实体模型。
对两轮自平衡小车的驱动电路、主控电路、检测电路、无线通信电路进行设计,并对各部分编写程序,使小车能够正常工作。
在Matlab中对小车PID控制以及EKF数据融合进行了仿真分析,结果表明小车的PID控制器能够很好的对小车稳定控制,而利用EKF融合使得小车姿态角则更加准确。
在搭建的两轮自平衡小车实物展示中,小车能够保持良好平衡控制效
果。