装载机控制系统设计论文
轮式装载机总体设计及制动系统设计
图书分类号:密级:毕业设计(论文)轮式装载机总体设计及制动系统设计LOADER DESIGN AND BREAKE SYSTEM DESIGN学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
本人完全意识到本声明的法律结果由本人承担。
论文作者签名:日期:年月日学位论文版权协议书本人完全了解关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归所拥有。
有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。
可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
论文作者签名:导师签名:日期:年月日日期:年月日摘要装载机是一种广泛用于交通、施工工地、水电、码头、挖矿这些方面的机器,泥土、沙石、石灰、木炭等散状物料都可以用它来装卸,矿物、比较硬的泥土等也可以被初步铲挖。
泥土和石块等散状物料也能被它装卸,石块、硬质土壤也能够初步铲挖。
通过变换使用不同的工作器械,可以适用于更广泛的工作方面。
比如交通施工,物料的收集与采装等等。
除此以外,装卸泥土、压平路面和提供牵引力等过程同样可以使用它完成。
装载机的优点不用多说,所以它在施工中扮演着越来越重要的角色。
装载机种类很多。
主要根据行走系结构可分为轮胎式和履带式两种。
本文主要以轮式装载机进行总体设计,和对装载机的制动部分进行设计。
全面总结归纳装载机安全设计应考虑的问题,整机性能和各系统各部分应采用的安全措施和设置的安全装置.虽然参考了相似类型的设计,但是本设计可以作为装载机设计的优化设计的参考。
关键词:装载机 ;部件 ;制动器 ;制动盘AbstractThe loader is a widely used in traffic, construction sites, hydropower, port, mining machine, soil, sand, lime, charcoal, and other bulk materials can use it to load and unload, minerals, relatively hard soil can also be preliminary shovel to dig. The bulk material such as dirt and stone can also be loading and unloading, rock, hard soil can also be preliminary shovel dig. By using different working instruments, it can be applied to a wider range of work.. Such as transportation construction, material collection and mining equipment, etc.. In addition, loading and unloading, flat pavement and soil provide traction process can also use it to complete. The advantages of the loader are needless to say, so it plays an increasingly important role in the construction..Many types of loaders. According to the main structure of the walk-tire can be divided into two and tracked. In this paper, to design a wheel loader, loader and the brake on some of the design. Summarized loader comprehensive security design should consider the issue with two properties and different parts of the system should be set up safety measures and the safety device. Although the reference to a similar type of design, but this design can be used as the design of optimal design Loader For reference.Key words: loader parts brakes brake disc目录前言 (16)1、关于国内外装载机的自己的看法 (17)1.1国外装载机发展趋势 (17)1.2国内轮式装载机的发展趋势 (18)2、在设计中的装载机的主要性能参数定义与单位 (20)3、装载机设计 (21)3.1 装载机的总体设计 (21)3.2 装载机零部件型号的确定 (22)3.2.1 装载机的动力类型的选择 (22)3.2.2 液力变矩器的选择 (22)3.2.3 变速箱的选择 (23)3.2.4 驱动桥的选择 (24)3.2.5 轮胎型号的选择 (24)3.2.6 装载机的转向设计 (25)3.2.7 装载机的工作机构设计 (26)3.2.8 装载机液压系统设计 (28)3.2.9 装载机的润滑系统 (28)3.3 装载机稳定性分析 (30)3.3.1 装载机不转向时候纵向爬坡最大坡度 (30)3.3.2 装载机不转向时候在坡道上的横向稳定性 (31)3.4 装载机生产率的计算 (32)4、装载机制动系统设计 (33)4.1 制动系可分为如下几类 (33)4.1.1 蹄式制动器 (34)4.1.2 钳盘式制动器 (34)4.1.3 盘式制动器 (34)4.2选择封闭湿式多盘制动器来设计 (34)4.2.1 制动加速度的确定 (34)4.2.2整车制动力的确定: (35)4.2.3整车制动力矩的确定: (35)4.2.4 单个制动力矩的确定: (36)4.3装载机中制动距离的计算: (36)4.4盘式制动器的摩擦片的确定: (37)4.4.1 液压缸的设计 (37)4.4.2 花键轴的设计 (44)4.4.3 确定动摩擦盘 (45)4.4.4 确定静摩擦盘的尺寸: (46)4.5 制动器的校核计算: (48)4.5.1 制动器的受压校核 (48)4.5.2 制动器的温升校核 (48)4.6选择制动器的润滑油 (49)总结 (50)致谢 (51)参考文献 (52)附录A (53)附录B (58)FIELD OF THE INVENTION (60)BACKGROUND OF THE INVENTION (61)SUMMARY OF THE INVENTION (63)BRIEF DESCRIPTION OF THE DRAWINGS (65)前言我国装载机开始于九零年代中后期,到目前一共历经了三个发展过程:六十年代仿制摸索阶段;第二个阶段是自主研发时期;第三个阶段是借鉴技术、走向国际的阶段。
装载机控制系统设计
装载机控制系统设计【摘要】:铲装作业是装载机工作过程的重要组成部分,决定了装载机作业的效率和性能。
采用计算机技术和电液比例技术来控制工作装置的运动,对铲装过程中的几个重要参数进行自动控制,进而实现优化工作过程的目标。
根据装载机的工作原理,本课题设计了装载机的单片机控制系统。
【关键词】:电液比例控制,PWM ,51单片机,自动控制【Abstract】: bucketing operations is an important part of the loaderwork process, to determine the efficiency and performance of theloader operation. Computer technology and electro-hydraulicproportional technology to control the movement of the workingdevices, automatic control of several important parameters in thebucketing process, thus achieving the goal of the optimizationprocess. According to the loader works, the subject has designed a single chip control system of the loader.【Key words】: electro-hydraulic proportional control, PWM, 51microcontroller, automatic control目录1前言............................................................................................................................................. - 3 -1.1嵌入式单片机的发展 (3)1.2本课题的设计背景 (3)1.3本文的主要研究内容及研究思路 (5)1.4本课题的研究意义 (6)2系统开发软硬件概述................................................................................................................. - 6 -2.1P ROTEUS仿真软件简介 (6)2.2K EIL编译及调试软件简介 (7)3装载机控制系统硬件设计......................................................................................................... - 9 -3.1高速开关阀对主阀芯位移控制原理.. (10)3.2控制系统硬件的选择 (15)3.2.1单片机的选择 .......................................................................................................... - 15 -3.2.2单片机与高速阀接口电路的设计 .......................................................................... - 15 -3.2.3单片机系统中的按键接口 ...................................................................................... - 16 -3.2.4串行通信接口 .......................................................................................................... - 17 -3.2.5传感器的选用 .......................................................................................................... - 19 -3.2.6A/D转换芯片............................................................................................................... - 21 -3.2.7装载车灯的控制(略) .......................................................................................... - 21 -3.2.8电源的设计.............................................................................................................. - 21 -3.3单片机应用系统的整体设计.. (22)4装载机控制系统的软件设计................................................................................................... - 23 -4.1软件开发的一般步骤 . (23)4.2软件设计总体思路 (25)4.3软件各模块的设计 (26)4.3.1系统的初始化 .......................................................................................................... - 27 -4.3.2手动控制子程序 ...................................................................................................... - 30 -4.3.3自动控制子程序 ...................................................................................................... - 30 -4.4程序的调试仿真 (33)5总结及致谢............................................................................................................................... - 37 -6参考文献................................................................................................................................... - 38 -附录:........................................................................................................................................... - 39 -附录I控制系统部分源代码 (39)附錄II系統仿真用原理圖 (43)1前言1.1 嵌入式单片机的发展单片微型计算机是大规模集成电路技术发展的产物,属第四代电子计算机,它具有高性能、高速度、体积小、价格低廉、稳定可靠、应用广泛的特点。
一种装载机的无线遥控系统设计
种应用于工业现场,具有远距离、高nI靠性的多路无线遥控系统。该遥控系统由发射、接收和驱动控制i部分组成,提供无线键盘
操作控制与Pc机界面独立操作控制的两种遥控模式,同时,软件部分采用了模块化结构设计方法。经过多次现场调试实验,其结
果表明,该遥控系统具有较强的实用性,另外,经过改进也可用于其他设备的控制,有较好的扩展功能。
NY:McGraw—HiU Companies,2002.
[3]吴兆亮,邱进申.板式塔塔板主要结构尺寸的新设计方 法——负荷性能网法[J].化学.T.程,1997,25(1):23-26.
[4] 刘保柱.利用Excel和VBA开发板式塔设计软件[J].计 算机与应用化学,2006,23(10):1035·1037.
发射端键盘电路主要是利用PICl6F877A单片机 的一般L/O进行扩展设计,来实现对按键值数据的采 集。该无线遥控系统为工业使用,应根据具体的实际 操作设置好控制点数。对于装载机,它在工业操作中 要求有4路控制活动:前进、后退;左转、右转;铲斗上 升、铲斗下降;铲斗装斗、铲斗卸斗。正确地选择遥控 器的控制点数可有效合理地降低系统成本。实际操作 中要求实现多路的同时控制,一般来讲,发射器上的一 个按钮占一个控制点,本设计对键盘的设置采用按下 键盘按键执行该按键对应的控制操作动作,松开该按 键则控制操作动作停止№J。再设计两个功能按键:开 关、复位。由于PICl6F877A单片机的L/O端口具有 中断功能,在软件设计时可以采用键盘扫描的方式采 集键值,也可以利用L/O的中断功能实现键盘输入。 需要指出的是,本次设计共对lO个键进行设置,以控 制4路8个控制活动及两个功能开关,每一路中的两 个动作设置为不能同时触发进行,而多路的动作则设 置为可同时触发进行工作。在实验操作中本研究采用 4×4的矩阵键盘,其与单片机、发射模块电路连接图 如图3所示。
装载机工作装置及其液压系统设计机械毕业设计论文

工业大学本科毕业设计(论文)装载机工作装置及其液压系统设计摘要装载机属于铲土运输类机械,是一种通过在支座前端安装一个完整的铲斗支撑结构和连杆,随机器向前运动进行装载或挖掘,以及提升、运输和卸载的自行式机械。
它广泛用于公路、铁路、建筑、水电、港口和矿山等工程领域。
装载机具有作业速度快、效率高、机动性好、操作轻便等优点,因此成为工程建设中土石方施工的主要机种之一。
对于加快工程建设速度,减轻劳动强度,提高工程质量,降低工程成本都发挥着重要的作用,是现代机械化施工中不可缺少的装备之一,对国民经济发展起着十分重要的作用。
本次设计采用先进的现代设计方法和理念,对装载机工作装置进行了总体设计和零部件设计。
主要包括装载机工作装置的关键零部件,如铲斗、动臂,连杆机构以及转斗油缸、举升油缸等,并对重要零件进行了受力分析以及强度校核。
液压系统在装载机工十分重要,本次设计只是分析了工作装置的液压系统,并得出该液压系统的工作油路运行图。
关键词: 装载机,铲斗, 工作装置,液压系统ABSTRACTLoader as part of the shoveling transport machinery, is a kind of through the pedestal front installation of a full bucket support structure and the connecting rod, along with the machine for loading or digging, moving forward and enhance self-propelled machinery, transportation and unloading.It is widely used in highway, railway, building, water and electricity, ports, and mining and other engineering fields. Loader has a operation speed, high efficiency, good maneuverability, the advantages of convenient operation, thus become the conditions in the construction of engineering construction of one of the main models.To speed up the construction speed, reduce labor intensity, improve project quality, reduce engineering cost are play an important role, is one of the indispensable equipment in modern mechanical construction, plays an important role in national economic development.This design USES the modern advanced design methods and ideas, the loader working device has carried on the overall design and parts design. Mainly including the key components of loader working device, such as bucket, movable arm, linkage and turning cylinder, lifting oil cylinder, etc., and has carried on the stress analysis and strength check to important parts.Hydraulic systems are important in load mechanic, this design only working device hydraulic system are analyzed, and concluded that the hydraulic system oil running.Key words: loader, Bucket,Working device,The hydraulic system目录第1章装载机的发展及应用 (1)1.1 装载机的概论 (1)1.2 装载机的发展与前景 (1)1.2.1 国外装载机发展趋势 (1)1.2.2 国内装载机发展趋势 (2)第2章装载机工作装置设计 (3)2.1装载机工作装置设计概述 (3)2.1.1 装载机工作装置设计概论 (3)2.1.2 结构形式的选择 (3)2.2 铲斗基本参数的确定 (4)2.3工作机构连杆系统的尺寸参数设计 (6)2.3.1转斗油缸后置式反转六杆机构 (6)2.3.2工作装置的机构设计 (6)2.3.3动臂设计 (7)2.3.4连杆机构的设计 (8)第3章装载机工作装置的受力分析与强度校核 (11)3.1铲斗重量计算 (11)3.2 工作装置的受力分析 (12)3.2.1工况水平偏载计算 (12)3.2.2工况垂直偏载计算 (14)3.3 动臂的强度校核 (16)3.4 铰销的强度校核 (19)3.5连杆的强度校核 (21)3.6 摇臂的强度校核 (22)第4章工作装置液压系统设计 (26)4.1 转斗油缸的选择及其作用力的确定 (26)4.2 动臂油缸的选择及其作用力的确定 (28)4.3工作装置液压系统的设计 (29)4.3.1 工作油路分析 (29)4.3.2 工作装置油路设计 (31)结论 (32)参考文献 (33)致谢 (34)第1章装载机的发展及应用1.1装载机的概论装载机主要用来铲、装载、卸载、运送土块和石材,也可以对岩石、硬土进行机械铲掘作业的一种机械。
ZL50装载机总体及工作装置设计(铲斗)论文
摘要Zl50装载机是我国轮式装载机系列中的中型产品,该机是一种较大型的以装卸散状物料为主的工程机械,广泛应用于矿山,基建,道路修筑,港口,货场,煤场等地进行装载,推土,铲挖,起重,牵引等作业。
Zl50装载机属于ZL系列,采用轮式行走系,液力机械传动系,交接时车架,工作装置采用液压操纵,所以该机具有机动性好,转向灵活,生产率高,操纵轻便等优点,另外,该机后桥布置为摆动桥,增加了整机的稳定性,所以该机安全性好。
Zl50装载机采用液力变矩器,动力换挡变速箱,四轮驱动,液压转向,嵌盘式制动器,铰接式车架的先进机构,具有牵引力大,操作方便,转弯半径小,作业效率高等优点。
设计步骤简单如下:1.对装载机的总体进行分析,确定总体参数;2.牵引计算,确定出各档及各档传动比;3.对装载机进行整体布置,并绘出总体布置图;4.工作装置的设计为重点,采用相似设计,以ZL20轮式装载机的铲斗为参考斗进行新的铲斗参数设计及选型;采用图解设计法对动臂,斗四连杆机构,斗油缸四连杆机构尺寸进行了优化设计,并着重对铲斗进行设计,其中包括铲斗外形尺寸,确定在装载机上的位置,强度验算。
关键词:轮式装载机,工作装置设计,铲斗设计AbstractThe loader ZL50 iswheel type and it is much bigger among the series made in our country.It is suitable for loading discharging materials and it applies for mine,capital conduction,road builing ,port,field,coalfield and carries loading ,pushing dust ,diging rising weight.The loader ZL50 is ZL series.It adopts whell type system, liquid engine driving system,ream meet vehcle type, working set of hydraulic pressure contolling.So it has good flexibility, turn agility high productivity,controlling handiness ets. Its back bridge ,so increases the stability of whole machine,and it has a good security.Being quipped with advanced devices such as hydraulic torque conventer power shift gearbox four wheel driving,hydraulic chuck disk break and artallated frame .So the loader model ZL50 is featured with high pulling capacity,small turning radius.all of which make it possible for easy operation.thus resulting in the high efficiency of our product .In my design,I adopt counter shaft power shi ft transmission’s construction is simple and maincenance is easy .the transmission has two forward and one reverse gear ,it can provide three speeds.KEY WORDS: the round type load machine, design of the work part, shovel design.目录第一章、前言 (1)第二章、总体设计 (3)2.1概述 (3)2.2选择确定总体参数 (3)2.3装载机底盘部件形式选择 (14)第三章、牵引计算 (24)3.1柴油机与编剧企联合工作特性 (24)3.2确定各档位和各档传动比 (32)3.3运输工况的牵引特性曲线 (36)3.4求出格挡最高车速分析该车的牵引特性 (40)第四章、工作装置设计 (42)4.1设计要求 (42)4.2铲斗的设计 (42)4.3动臂设计 (45)4.4连杆机构设计 (46)4.5动臂油缸铰点位置的确定 (51)4.6动臂强度验算 (51)第五章、工作装置液压系统设计 (62)5.1设计要求 (62)5.2液压系统选择 (62)5.3液压泵系统的选择 (63)5.4液压系统压力 (63)5.5控制元件的形式和操纵 (64)5.7油泵的选择 (70)第六章、总体布置 (74)6.1概述 (74)6.2估计各部件的重量,确定各部件位置 (74)6.3求出平衡重 (78)6.4进行桥荷的分配 (79)6.5验算轮胎载荷 (81)第七章、毕业设计小结 (82)参考文献 (83)附:英文翻译原文英文翻译毕业实习报告。
装载机控制系统设计

装载机控制系统设计【摘要】通过对装载机铲掘过程的分析,利用作业阻力决定铲斗的动作,并且采用控制技术,控制电液比例方向阀的开口,来调节铲斗的提升速度与角度,使装载机按照一定的铲掘轨迹进行工作。
利用单片机控制技术,设计装载机工作装置工作过程的控制系统,达到减轻操作者的劳动强度,提高装载机工作效率的目的。
【关键词】装载机控制系统设计一、引言装载机通常处于环境温度高、温度变化大、灰尘多、光照度强弱悬殊以及振动大的恶劣环境下作业,操作员在进行铲掘作业时,一边要进行驾驶,一边还要观察前方的工作装置,作出实时判断,频繁地调节动臂和铲斗的位置。
本文将运用机电一体化技术、传感器和单片机构成的装载机工作装置控制系统,辅助操作者完成铲掘作业。
这不仅能提高作业效率和作业水平、降低劳动强度,同时也降低了对操作者的技巧要求,使一般人也能完成高精度、高标准的作业。
二、控制系统的设计装载机工作装置控制系统主要由单片机控制模块、液压系统和装载机工作装置等部分组成。
其中,装载机工作装置是由铲斗1、动臂2、连杆3、摇臂4、转斗油缸5和动臂举升油缸6等主要部件通过铰接点相互连接而组成的2个自由度机构,是装载机作业的执行机构。
图1 装载机工作装置结构图操作者首先将装载机行驶到料堆附近,随着装载机铲斗插入料堆的同时,动臂油缸、转斗油缸上的压力传感器随时检测两缸大小腔的压力,然后计算出油缸的作用力;两个角位移传感器随时检测角度信号,这些信号通过放大、采用、A/D转换等一系列处理后,输送到单片机中。
单片机对这些数据进行计算,得到工作过程中的水平插入阻力和竖直掘起阻力,并分别与设定的最大值进行比较,插入力或掘起力达到最大值后则提臂或收斗。
提臂或收斗的选择由电磁换向阀控制。
将动臂或铲斗每次提升时刻的角度设定为给定值,控制器将检测的角度与给定的角度进行比较,得到各个位置的角度误差,并根据误差的大小按照一定的控制规律输出控制信号。
控制信号通过D/A转换、比例放大后传送给电液比例阀,电液比例阀根据控制信号控制动臂油缸和转斗油缸的进出油量,实现动臂或铲斗的运动角度和速度的控制。
自动装载机控制系统设计
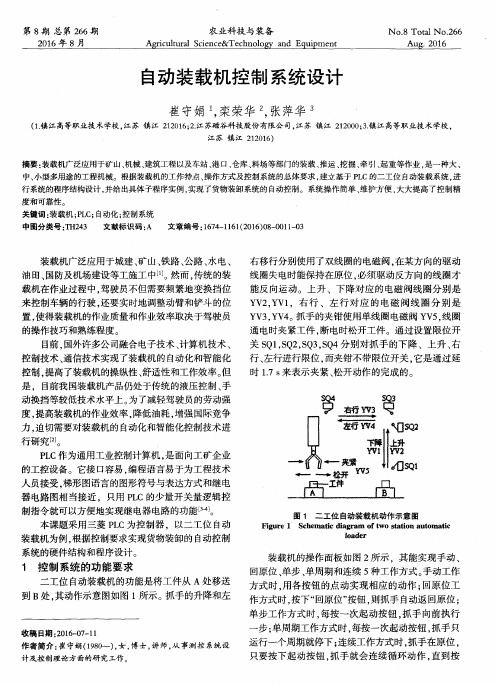
右 移行 分别 使用 了双线 圈 的电磁 阀 , 在 某方 向的 驱动
线圈失电时能保持在原位 , 必须驱动反方向的线圈才 能反向运动 。上升 、下降对应 的电磁 阀线圈分别是 Y V 2 , Y V1 ,右 行 、 左 行 对 应 的 电 磁 阀 线 圈 分 别 是 Y V 3 , Y V 4 。 抓手的夹钳使用单线 圈电磁阀 Y V 5 , 线圈 通电时夹 紧工件 , 断电时松开工件 。通过设置限位开 关S Q 1 , S Q 2 , S Q 3 , S Q 4 分别对抓手 的下降 、上升 、 右 行、 左行进行限位 , 而夹钳不带限位开关 , 它是通过延 时1 . 7 S 来表示夹紧 、 松开动作的完成 的。
上限位 X 1 7 接通时 , 辅助继 电器 M 0 变为 O N, 表示机 械手在原位。 这时 , 如果开始执行用户程序 、 系统处于 手动 或 回原位 状 态 , 那么 初始 步对 应 的 M1 0被置 位 ,
作者简 介 : 崔 守娟 ( 1 9 8 ) , 女, 博士, 讲师 , 从 事测控 系统 设
计 及 控 制 理 论 方 面 的研 究工 作 。
运行一个周期就停下 ; 连续工作方式时, 抓手在原位 , 只要 按下 起 动按 钮 。 抓 手 就 会 连续 循 环 动 作 , 直 到 按
关键词 : 装载机 ; P L C ; 自动化 ; 控制系统 中图分 类号 : T H2 4 3 文献标识码 : A 文章编号 : 1 6 7 4 — 1 1 6 1 ( 2 0 1 6 ) 0 8 — 0 0 1 1 - 0 3
装载机广泛应用于城建 、 矿山、 铁路、 公路 、 水电、 油田、 国防及机场建设等工施工中[ 1 ] 。 然而 , 传统的装
第8 期 总第 2 6 6 期
基于PDM的装载机设计及生产管理关键技术探究论文
基于PDM的装载机设计及生产管理关键技术探究论文基于PDM的装载机设计及生产管理关键技术探究论文引言1PDM系统概况PDM是用来管理所有与产品相关的信息的技术中国。
可以提高生产效率,有利于对产品的全生命周期进行管理,加强对于文档,图纸,数据的高效利用,使工作流程规范化。
PDM系统具有对产品构型管理、图文档管理、流程管理等功能,可以集成产品的设计、生产过程与PDM系统,从而实现产品设计与产品的制造生产的衔接,保障产品整个流程中同类数据的一致性,PDM系统对整个企业产品核心设计、开发、制造能力的积累和提升具有重要的意义。
2装载机设计和生产过程基础数据传统装载机的数据管理存在着一些问题,主要包括以下几点:(1)装载机生产数据管理无法准确反映装载机的制造、装配过程,因此缺乏对设计、生产、成本核算等方面的指导能力;(2)装载机生产数据管理系统无法准确描述装载机的需要的所有零部件,无法完整地描述装载机生产过程中产品、零部件等相互关系;(3)装载机的数据管理的层次结构无法适应新型装载机的设计、制作、配置过程;(4)在装载机的数据管理中,当装载机的型号逐渐增多时,各型装载机零部件借用较多、而且借用的零部件数量也将增多,此时,会导致零部件管理混乱。
为使中国期刊装载机数据满足PDM的要求,对装载机的设计和生产过程基础数据进行研究。
2.1装载机的零部件库和编码为建立装载机的PDM系统,首先需要建立装载机的零部件库,并建立零部件的编码规范和命名规则,规范装载零部件数据管理方式,改变传统的装载机零部件编号和命名方式。
主要包括以下工作:(1)建立新的装载机零部件编码规则,该编码规则,中国不再用于表述装载机型号和零部件的从属关系;(2)装载机零件的新的编码是唯一的,将是装载机零件的唯一标识。
设计编码规则时,零部件的编码将分为类别号和识别号,以方便后续的查询和管理;(3)基于装载机零部件本身的功能和属性,建立新的装载机零件命名规则,对现有装载机零部件进行统一命名。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
装载机控制系统设计
【摘要】通过对装载机铲掘过程的分析,利用作业阻力决定铲斗的动作,并且采用控制技术,控制电液比例方向阀的开口,来调节铲斗的提升速度与角度,使装载机按照一定的铲掘轨迹进行工作。
利用单片机控制技术,设计装载机工作装置工作过程的控制系统,达到减轻操作者的劳动强度,提高装载机工作效率的目的。
【关键词】装载机控制系统设计
中图分类号:s611 文献标识码:a 文章编号:
一、引言
装载机通常处于环境温度高、温度变化大、灰尘多、光照度强弱悬殊以及振动大的恶劣环境下作业,操作员在进行铲掘作业时,一边要进行驾驶,一边还要观察前方的工作装置,作出实时判断,频繁地调节动臂和铲斗的位置。
本文将运用机电一体化技术、传感器和单片机构成的装载机工作装置控制系统,辅助操作者完成铲掘作业。
这不仅能提高作业效率和作业水平、降低劳动强度,同时也降低了对操作者的技巧要求,使一般人也能完成高精度、高标准的作业。
二、控制系统的设计
装载机工作装置控制系统主要由单片机控制模块、液压系统和装载机工作装置等部分组成。
其中,装载机工作装置是由铲斗1、动臂2、连杆3、摇臂4、转斗油缸5和动臂举升油缸6等主要部件通过铰接点相互连接而组成的2个自由度机构,是装载机作业的执
行机构。
图1 装载机工作装置结构图
操作者首先将装载机行驶到料堆附近,随着装载机铲斗插入料堆的同时,动臂油缸、转斗油缸上的压力传感器随时检测两缸大小腔的压力,然后计算出油缸的作用力;两个角位移传感器随时检测角度信号,这些信号通过放大、采用、a/d转换等一系列处理后,输送到单片机中。
单片机对这些数据进行计算,得到工作过程中的水平插入阻力和竖直掘起阻力,并分别与设定的最大值进行比较,插入力或掘起力达到最大值后则提臂或收斗。
提臂或收斗的选择由电磁换向阀控制。
将动臂或铲斗每次提升时刻的角度设定为给定值,控制器将检测的角度与给定的角度进行比较,得到各个位置的角度误差,并根据误差的大小按照一定的控制规律输出控制信号。
控制信号通过d/a转换、比例放大后传送给电液比例阀,电液比例阀根据控制信号控制动臂油缸和转斗油缸的进出油量,实现动臂或铲斗的运动角度和速度的控制。
当角度达到要求值时,提升动臂或翻转铲斗,装载机继续插入,重复此过程,使铲斗按照一定的轨迹运动。
三、工作装置的模糊控制算法
由于装载机作业循环的多工况,以及外负载的多变化等因素,给系统辨识带来很大的困难,从而难以得到精确的数学模型。
现有的控制理论都是建立在被控对象精确数学模型的基础上,而模糊控
制不需要了解系统的精确数学模型,只依据操作人员的经验和专家的知识,经一定的数据处理后,形成若干条规则,作为模糊控制规则,然后仿照人脑的推理过程,确定推理法则,最后做出模糊决策,去执行具体的动作。
(一)模糊控制器的语言变量
模糊控制器的语言变量是以自然语言形式,而不是以数值形式给出的变量。
装载机工作装置工作过程的自动控制可归结为动臂和铲斗的转动角度的控制。
因此本文所设计的工作装置模糊控制系统的输入语言变量误差e和误差变化率ec可分别取为角度误差。
而输出语言变量u则是控制电液比例阀的电压信号u。
(二)输入精确量的模糊化
装载机工作装置铲装物料过程中,动臂和铲斗均向上提升或翻转,规定每次角度变化为15°。
设角度误差e的基本论域为[0,α],(对于本系统,α取为15),若选定e的论域x=[-6,-5,-4,-3,-2,-1,-0,+0,+1,+2,+3,+4,+5,+6],则得误差e的量化因子为。
为语言变量e选取7个语言值:es、vs、s、m、l、vl、el,分别表示极小、很小、小、中、大、很大、极大,形成7个模糊子集,用来反映误差的大小。
同理,设角度误差变化率è的基本论域为[-β,+β](本系统中β取为10),若选定语言变量ec的论域y=[-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6],则得误差变化率è的量化因子为。
为语言变量ec选取nl、nm、ns、o、ps、pm、pl,分别表示为负大、
负中、负小、零、正小、正中、正大共7个模糊子集,用来反映误差变化率的大小。
设控制量变化u的基本论域为[0,γ](本系统中γ取为9),若选定u的论域为z=[-6,
图4 语言变量e的隶属函数曲线图
-5,-4,-3,-2,-1,0,+1,+2,+3,+4,
+5,+6],则得控制变化量u的比例因子为。
同样,为语言变量u选取o、vs、
s、m、l、vl、el,分别表示零、很小、小、中、大、很大、极大共7个模糊子集,用来反映控制量的大小。
通过操作者地实际经验总结,可确定出在
图5语言变量ec的隶属函数曲线
论域x、y、z上用以描述模糊子集的隶属函数
μ(x)的形状如图4、5、6所示。
(三)模糊控制规则的确定
根据对装载机整机作业过程的观察和操作者的大量实践经验,按“if e and ec then u”的逻辑推理,即可求出总的模糊关系r:r=e×ec×u
图6语言变量u的隶属函数曲线
有了模糊关系r,对于已知的角度误差和其变化率,则输出量可由下式求得:
(四)模糊输出量的精确化
由误差和误差变化率通过模糊控制算法所求得的是模糊量,要进行控制必须把模糊量转换为精确量。
一般应用加权平均法为模糊集合u求得判决结果。
执行量的值u可由下式求得:
这样得到的u即是非模糊化后得到的实际控制中所需要的精确值。
(五)模糊控制表
对论域x,y中的全部元素的所有组合计算出相应的以论域z元素表示的控制量变化值,并写成矩阵形式。
由该矩阵构成如表1的总控制表。
在实际应用中,考虑单片机的特点,力求使其存储、变换和处理过程简单、快捷、节省内存,单片机的模糊一般采用直接查表法,将此表存储在单片机的存储器中,建立一个查询表,此查询表即为模糊控制算法的最终结果,在过程控制中,单片机将变换得到的实际角度误差e和角度误差变化率é分别乘以量化因子12/α和6/β,得到以相应论域元素表征的查找查询法所需的e和é,直接与表对比,通过查表程序即可马上得到所需的控制变化量u,再乘以比例因子12/γ,便得到实际的控制工作装置的控制变化量。
【参考文献】
[1] 余永权,曾碧.单片机逻辑控制.北京航空航天出版社,1995.7
[2] 余永权,曾碧.单片机逻辑控制.北京航空航天出版社,1995.7
[3] 张曾科.模糊数学在自动化技术中的应用.清华大学出版社,1997.7
[4] 张立民.mcs-51系列单片机实用接口技术.北京航天航空大学出版社,1993.7
[5] david rock. control system for automatically controlling work implement of an earth working machine to capture material.1996。