船舶动力相关公式
船舶原理公式
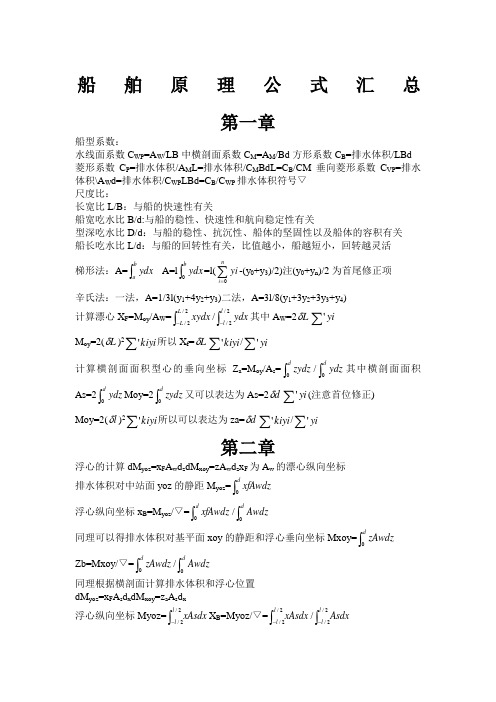
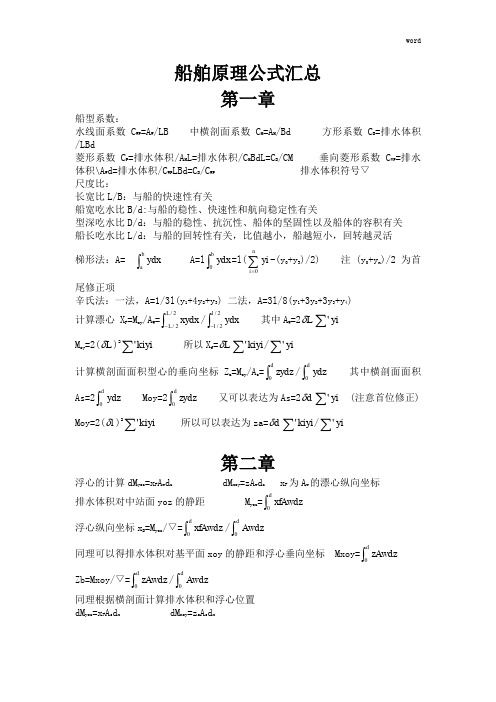
船舶原理公式汇总第一章船型系数:水线面系数C WP =A W /LB 中横剖面系数C M =A M /Bd 方形系数C B =排水体积/LBd 菱形系数C P =排水体积/A M L=排水体积/C M BdL=C B /CM 垂向菱形系数C VP =排水体积\A W d=排水体积/C WP LBd=C B /C WP 排水体积符号▽ 尺度比:长宽比L/B :与船的快速性有关船宽吃水比B/d:与船的稳性、快速性和航向稳定性有关型深吃水比D/d :与船的稳性、抗沉性、船体的坚固性以及船体的容积有关 船长吃水比L/d :与船的回转性有关,比值越小,船越短小,回转越灵活 梯形法:A=⎰b aydx A=l ⎰bydx 0=l(∑=ni yi 0-(y 0+y 3)/2)注(y 0+y n )/2为首尾修正项辛氏法:一法,A=1/3l(y 1+4y 2+y 3)二法,A=3l/8(y 1+3y 2+3y 3+y 4) 计算漂心X F =M oy /A W =⎰-2/2/L L xydx /⎰-2/2/l l ydx 其中A W =2Lδ∑yi 'M oy =2(L δ)2∑kiyi '所以X f =L δ∑kiyi '/∑yi '计算横剖面面积型心的垂向坐标Z a =M oy /A s =⎰d zydz 0/⎰dydz 0其中横剖面面积As=2⎰dydz 0Moy=2⎰dzydz 0又可以表达为As=2dδ∑yi '(注意首位修正)Moy=2(l δ)2∑kiyi '所以可以表达为za=d δ∑kiyi '/∑yi '第二章浮心的计算dM yoz =x F A w d z dM xoy =zA w d z x F 为A w 的漂心纵向坐标 排水体积对中站面yoz 的静距M yoz =⎰dxfAwdz 0浮心纵向坐标x B =M yoz /▽=⎰d xfAwdz 0/⎰dAwdz 0同理可以得排水体积对基平面xoy 的静距和浮心垂向坐标Mxoy=⎰dzAwdz 0Zb=Mxoy/▽=⎰d zAwdz 0/⎰dAwdz 0同理根据横剖面计算排水体积和浮心位置 dM yoz =x F A s d x dM xoy =z a A s d x 浮心纵向坐标Myoz=⎰-2/2/l l xAsdx X B =Myoz/▽=⎰-2/2/l l xAsdx /⎰-2/2/l l Asdx浮心垂向坐标Myoz=⎰-2/2/l l zaAsdx z B =Mxoy/▽=⎰-2/2/l l zaAsdx /⎰-2/2/l l Asdx第三章复原力矩M R =GZ ∆BM =I T /∆BML =I LF /∆初稳性公式和稳性高复原力矩M R =GZ ∆=GM ∆φ 忽略第四章M R =GZ ∆可以得到M R =GZ ∆=∆L 重点:静稳性曲线的特征M R =GZ ∆M R =GZ ∆=∆L 所以M R =∆LL=GM φ说明:船舶在正浮的平衡位置,静稳性臂L 对横倾角的导数等于初稳性高度GM 故,对于静稳性曲线来说,其远点的切线的斜率等于初稳性高度GM第七章船舶阻力总阻力=兴波阻力+摩擦阻力+粘压阻力(漩涡阻力) R t =R w +R f +R pv估算阻力的近似方法海军系数:对于船型近似,尺度和航速相同的船舶,他们的阻力Rt 和排水量及航速都有以下的关系, R t ∝∆2/3V 2有效功率PE 和排水量∆已及航速V 的关系 P E ∝∆2/3V 3又可以表示为 C e =∆2/3V 3/P E Ce 为海军系数 ∆为排水量 V 为航速Kn 艾亚法: 单桨船C BC =1.08-1.68Fr 双桨船C BC =1.09-1.68Fr艾亚法给出的对应于上述标准的有效功率P EPE=∆0.64V3S/C0*0.735(KW)V S为静水中航行的速度C0系数可以根据长度排水量系数L/∆1/3和速长比V/L这里的LS垂线间长雷诺定律C f=R f/1/2ρv2s=f(R e)摩擦阻力R f雷诺数R e=Lν/Vν为水运动粘性系数V为速度傅汝德数F f=V/gl傅汝德数的比较定律Ls/=V mα1/2V s/gls=V m/glm所以得出V s=V m Lmα为模型船与实船的缩尺比相似定律:流体兴波阻力是傅汝德数的函数,因此总阻力必定是粘性阻力和兴波阻力的和,也就是雷诺数与傅汝德数的函数(不做要求)Ct=Rt/1/2ρv2s=f(Re,Fr)傅汝德假定,1假定船体总阻力可以分为独立的两部分,一是摩擦阻力,二是粘压阻力和兴波阻力,合并后为剩余阻力。
船舶原理公式
船舶原理公式汇总第一章船型系数:水线面系数 C WP =A W /LB 中横剖面系数 C M =A M /Bd 方形系数C B =排水体积/LBd菱形系数C P =排水体积/A M L=排水体积/C M BdL=C B /CM 垂向菱形系数 C VP =排水体积\A W d=排水体积/C WP LBd=C B /C WP 排水体积符号▽ 尺度比:长宽比L/B :与船的快速性有关船宽吃水比B/d:与船的稳性、快速性和航向稳定性有关型深吃水比D/d :与船的稳性、抗沉性、船体的坚固性以及船体的容积有关 船长吃水比L/d :与船的回转性有关,比值越小,船越短小,回转越灵活 梯形法:A= ⎰b aydx A=l ⎰bydx 0=l(∑=ni yi 0-(y 0+y 3)/2) 注 (y 0+y n )/2为首尾修正项辛氏法:一法,A=1/3l(y 1+4y 2+y 3) 二法,A=3l/8(y 1+3y 2+3y 3+y 4) 计算漂心 X F =M oy /A W =⎰-2/2/L L xydx /⎰-2/2/l l ydx 其中A W =2Lδ∑yi 'M oy =2(L δ)2∑kiyi ' 所以X f =L δ∑kiyi '/∑yi '计算横剖面面积型心的垂向坐标Z a =M oy /A s =⎰dzydz 0/⎰dydz 0其中横剖面面积As=2⎰dydz 0Moy=2⎰dzydz 0又可以表达为As=2dδ∑yi ' (注意首位修正)Moy=2(l δ)2∑kiyi ' 所以可以表达为za=d δ∑kiyi '/∑yi '第二章浮心的计算dM yoz =x F A w d z dM xoy =zA w d z x F 为A w 的漂心纵向坐标 排水体积对中站面yoz 的静距 M yoz =⎰dxfAwdz 0浮心纵向坐标x B =M yoz /▽=⎰d xfAwdz 0/⎰dAwdz 0同理可以得排水体积对基平面xoy 的静距和浮心垂向坐标 Mxoy=⎰dzAwdz 0Zb=Mxoy/▽=⎰d zAwdz 0/⎰dAwdz 0同理根据横剖面计算排水体积和浮心位置 dM yoz =x F A s d x dM xoy =z a A s d x浮心纵向坐标Myoz=⎰-2/2/l l xAsdx X B=Myoz/▽=⎰-2/2/l l xAsdx/⎰-2/2/l l Asdx 浮心垂向坐标Myoz=⎰-2/2/l l zaAsdx z B=Mxoy/▽=⎰-2/2/l l zaAsdx/⎰-2/2/l l Asdx第三章复原力矩 MR =GZ ∆BM=I T/∆BML=I LF/∆初稳性公式和稳性高复原力矩MR =GZ∆=GM∆φ忽略第四章M R =GZ∆可以得到MR=GZ∆=∆L重点:静稳性曲线的特征M R =GZ∆ MR=GZ∆=∆L所以M R=∆L L=GMφ说明:船舶在正浮的平衡位置,静稳性臂L对横倾角的导数等于初稳性高度GM 故,对于静稳性曲线来说,其远点的切线的斜率等于初稳性高度GM第七章船舶阻力总阻力=兴波阻力+摩擦阻力+粘压阻力(漩涡阻力)R t =Rw+Rf+Rpv估算阻力的近似方法海军系数:对于船型近似,尺度和航速相同的船舶,他们的阻力Rt和排水量及航速都有以下的关系,Rt∝∆2/3V2有效功率PE和排水量∆已及航速V的关系PE∝∆2/3V3又可以表示为Ce=∆2/3V3/P ECe为海军系数∆为排水量V为航速Kn艾亚法:单桨船CBC=1.08-1.68Fr双桨船CBC=1.09-1.68Fr艾亚法给出的对应于上述标准的有效功率PEPE=∆0.64V3S /C*0.735(KW)VS为静水中航行的速度C0系数可以根据长度排水量系数L/∆1/3和速长比V/L这里的LS 垂线间长雷诺定律Cf =Rf/1/2ρv2s=f(R e) 摩擦阻力R f雷诺数Re=Lν/V ν为水运动粘性系数 V为速度傅汝德数Ff=V/gl傅汝德数的比较定律V s /gls=V m/glm所以得出V s=V m LmLs/= V mα1/2α为模型船与实船的缩尺比相似定律:流体兴波阻力是傅汝德数的函数,因此总阻力必定是粘性阻力和兴波阻力的和,也就是雷诺数与傅汝德数的函数(不做要求)Ct=Rt/1/2ρv2s=f(Re,Fr)傅汝德假定,1假定船体总阻力可以分为独立的两部分,一是摩擦阻力,二是粘压阻力和兴波阻力,合并后为剩余阻力。
船舶阻力与船速的计算公式

船舶阻力与船速的计算公式船舶阻力与船速的计算公式是船舶设计和航行中非常重要的内容。
船舶阻力是指船舶在航行中受到的水流、风力和波浪等外部力量的阻碍,是决定船舶动力系统设计和船舶性能的重要因素之一。
船舶的阻力与船速之间存在着密切的关系,通过计算可以得到船舶在不同航速下的阻力大小,为船舶设计和航行提供重要的参考依据。
船舶阻力的计算公式可以分为静水阻力和波浪阻力两部分。
静水阻力是指船舶在静止状态下受到的水流阻力,主要与船体的形状和湿表面积有关;波浪阻力是指船舶在航行中受到的波浪阻力,主要与船舶航行速度和波浪形态有关。
下面我们将分别介绍船舶静水阻力和波浪阻力的计算公式。
静水阻力的计算公式通常采用法国工程师Froude提出的Froude公式,即:\[ R = k \times S \times V^2 \]其中,R为静水阻力,k为阻力系数,S为湿表面积,V为船舶航行速度。
阻力系数k是与船舶的形状和流体粘度等因素相关的常数,可以通过实验或经验公式进行确定。
湿表面积S是指船舶在水中的受潮表面积,通常可以通过船舶的几何形状参数计算得到。
船舶的航行速度V是指船舶相对于水流的速度,是静水阻力的一个重要影响因素。
通过Froude公式可以得到船舶在不同航速下的静水阻力大小,为船舶设计和性能分析提供了重要的参考数据。
波浪阻力的计算公式通常采用Holtrop提出的Holtrop公式,即:\[ R_{w} = 0.5 \times \rho \times g \times C_{1} \times A_{T} \times B_{L} \times \left( 1 + k_{B} \times \left( 1.0 C_{B} \right) \right) \times C_{B} \times S \times\left( 1 + 0.35 \times \left( \frac{B_{L}}{T} \right) \right) \times \left( 1 C_{F} \right) \times \left( 1 \frac{C_{F}}{C_{F} + 1} \right) \times \left( 1 \frac{C_{F}}{C_{F} + 2} \right) \times \left( 1 \frac{C_{F}}{C_{F} + 3} \right) \times C_{F} \times V^2 \]其中,\( R_{w} \)为波浪阻力,\( \rho \)为水的密度,g为重力加速度,\( C_{1} \)为修正系数,\( A_{T} \)为横截面积系数,\( B_{L} \)为船舶长度与波长的比值,\( k_{B} \)为波浪系数,\( C_{B} \)为方形系数,S为湿表面积,\( T \)为船舶吃水深度,\( C_{F} \)为摩擦系数,V为船舶航行速度。
船舶有效功率计算公式
船舶有效功率计算公式船舶的有效功率与船舶的吨位、速度以及推进器的效率均有关系。
在计算船舶的有效功率时,必须要先求出船舶的航行阻力,也就是需要耗费功率的阻力。
船舶的航行阻力是由水阻力、空气阻力、波浪阻力、摩擦阻力和舵的阻力等所组成的。
通过对船舶的吨位、速度和船舶航行特性的分析,可以得出船舶的总航行阻力,并将其作为计算有效功率的基础数据。
船舶的有效功率是通过将船舶的总功率减去用于战略推动的功率所得出的。
在这里我们先来看一下船舶的总功率是如何计算的。
船舶的总功率包括了所有转换为动力的能量,如内燃机、推进器以及其他辅助设备的能量,因此总功率也被称作目标功率。
目标功率可以通过以下公式计算:总功率 = 上临界速度× 阻力系数× 船舶水线长× 船舶吃水深度其中,阻力系数根据船舶的类型、吨位、速度等要素进行估算。
上临界速度是船舶最快的航速,其指的是船舶航行时的最高速度。
船舶的水线长是船舶的长度,而吃水深度则是测量船舶在水中的深度。
通过这个公式得出的结果即为船舶的总功率。
而有效功率则是指推进器将船舶所需功率转换为战略推动力后的功率。
有效功率可以通过下面公式进行计算:有效功率 = 总功率 - 推进器效率× 推进器的推力在这里,推进器的效率指的是推进器的推力转移到水中时损失的能量百分比。
而推进器的推力可以测量出来。
通过这个公式,我们可以计算出船舶的有效功率。
总而言之,通过这两个公式,我们可以得出船舶的总功率和有效功率。
而在实际应用当中,我们往往需要计算出船舶的有效功率,以便更好地了解船舶的能源使用情况,从而优化航行计划和放大操作效率。
飞艇计算数学公式

飞艇是一种轻于空气的航空器,其设计和操作涉及到许多数学公式和计算。
以下是一些与飞艇相关的基本数学公式:
1.升力与阻力计算:
升力(L)= 0.5 × ρ × V^2 × S × CL
阻力(D)= 0.5 × ρ × V^2 × S × CD
其中,ρ 是空气密度,V 是飞艇速度,S 是飞艇面积,CL 是升力系数,CD 是阻力系数。
2. 功率与效率计算:
功率(P)= T × V
效率(η)= L / (P / E)
其中,T 是飞艇推力,V 是飞艇速度,E 是发动机效率。
3. 浮力与重量计算:
浮力(B)= ρ × g × V_volume_of_airship
重量(W)= B + W_payload
其中,V_volume_of_airship 是飞艇体积,W_payload 是有效载荷。
4. 稳定性与操纵性计算:
翻滚角(θ)= (L / (W × sin(γ))) × (sin(δ) / cos(δ))
滚转角速度(ω)= (θ / Δt)
其中,γ 是攻角,δ 是侧滑角,Δt 是时间。
5. 推进效率计算:
推进效率(η_prop)= (P_prop / P_total) × 100%
其中,P_prop 是推进功率,P_total 是总功率。
这些公式仅为基础计算,实际的飞艇设计和操作需要考虑更多复杂的因素和数学模型。
如需更多详细信息,建议咨询航空领域专业人士或查阅专业书籍。
船模推力计算

船模推力计算
船模推力的计算涉及到许多因素,如船体形状、螺旋桨尺寸和转速、电机功率等,以下是一些常用的计算公式:
1. 螺旋桨滑套比(slip ratio)计算公式
滑套比指的是螺旋桨进口速度与推进速度之间的比值,通常认为其值应该在0.05-0.1之间。
滑套比 = (pitch x RPM - speed)/(pitch x RPM)
其中,pitch指的是螺旋桨的推进距离,RPM指的是电机转速,speed指的是船模的推进速度。
2. 推进功率(propelling power)计算公式
推进功率是指将船模推进所需的功率,通常它由电机提供。
其计算公式为:
推进功率 = 推进力 x 推进速度
其中,推进力指的是螺旋桨产生的推进力,通常由舵机控制;推进速度指的是船模在水中推进的速度。
3. 推进力(propelling force)计算公式
推进力指的是螺旋桨产生的推进力。
其计算公式为:
推进力 = 螺旋桨直径² x 比功率 x 空气密度
其中,比功率指的是电机的输出功率与电机重量的比值;空气密度指的是水的密度。
以上仅为船模推力的一些基本计算公式,实际计算中可能还需要考虑到其他因素。
船舶主机功率曲线计算公式

船舶主机功率曲线计算公式船舶主机功率曲线是描述船舶主机功率与转速之间的关系的曲线图。
在船舶设计和运行中,了解船舶主机功率曲线对于确定船舶的性能和节能运行非常重要。
船舶主机功率曲线计算公式是用来计算船舶在不同转速下的功率输出的公式。
本文将介绍船舶主机功率曲线的计算公式及其应用。
船舶主机功率曲线计算公式通常由以下几个参数组成:功率(P)、转速(N)、扭矩(T)和效率(η)。
其中功率和转速是主要的参数,扭矩和效率是由功率和转速计算得出的。
船舶主机功率曲线计算公式可以表示为:P = T N / 9550。
其中,P为功率(单位为千瓦),T为扭矩(单位为牛顿·米),N为转速(单位为转每分钟),9550为转换系数。
在实际应用中,船舶主机功率曲线计算公式可以帮助船舶设计师和船舶操作人员确定船舶在不同转速下的功率输出。
通过计算功率曲线,可以得出船舶在不同工况下的功率需求,从而确定船舶的动力系统配置和运行方式。
此外,船舶主机功率曲线还可以用于评估船舶的性能和节能运行。
通过分析功率曲线,可以确定船舶在不同转速下的效率,从而优化船舶的运行方式,实现节能减排。
船舶主机功率曲线计算公式的应用不仅局限于船舶设计和运行,还可以应用于船舶动力系统的研发和改进。
通过计算功率曲线,可以评估不同动力系统配置的性能和经济性,从而选择最适合船舶的动力系统配置。
此外,船舶主机功率曲线还可以用于船舶主机的性能测试和验证。
通过实际测试船舶主机在不同转速下的功率输出,可以验证计算公式的准确性,并对船舶主机进行性能评估。
在船舶运行中,船舶主机功率曲线计算公式还可以用于确定船舶的最佳运行方式。
通过分析功率曲线,可以确定船舶在不同转速下的功率输出和效率,从而选择最佳的航行速度和转速,实现最佳的节能运行。
此外,船舶主机功率曲线还可以用于船舶的负荷管理。
通过分析功率曲线,可以确定船舶在不同负荷下的功率输出,从而优化船舶的负荷分配,实现最佳的节能运行。
船舶起重杠杆原理公式
船舶起重杠杆原理公式船舶起重作业中,杠杆原理公式可是个至关重要的家伙!它就像一把神奇的钥匙,能帮我们打开高效起重的大门。
先来说说这杠杆原理公式到底是啥。
简单来讲,就是动力×动力臂= 阻力×阻力臂。
这看起来挺简单的几个字和符号,里面藏着的学问可大着呢!想象一下,在一个港口,一艘巨大的货轮停靠在岸边。
起重机长长的臂膀高高举起,准备吊起那些沉重的集装箱。
这时候,杠杆原理公式就开始发挥它的魔力啦!起重机的起重臂就是一个杠杆,动力来自于起重机的电机提供的力量,动力臂就是起重臂从支点到动力作用线的距离,阻力就是集装箱的重量,阻力臂则是起重臂从支点到集装箱重心的距离。
通过巧妙地调整起重臂的长度和角度,也就是改变动力臂和阻力臂的长度,就能用相对较小的动力吊起超级重的货物。
就说我曾经在港口看到的一次起重作业吧。
那天阳光特别好,海风轻轻吹着。
起重机司机师傅坐在操作室里,神情专注。
一个超大的集装箱摆在地上,看着就让人觉得沉甸甸的。
师傅启动起重机,起重臂缓缓落下。
当吊钩准确地勾住集装箱的那一刻,师傅开始操作起重臂升起。
我能看到起重臂一点点地抬起,一开始似乎有点吃力,但随着起重臂角度的调整,集装箱稳稳地被吊起,然后精准地放到了指定的位置。
我当时就在想,这看似简单的一吊一放,背后可全是杠杆原理公式在支撑着呢。
在船舶起重中,准确运用杠杆原理公式不仅能提高工作效率,还能确保安全。
要是不了解这个公式,随便乱操作,那后果可不堪设想。
比如说,如果动力臂太短,而阻力臂太长,就算电机使出吃奶的劲儿,也可能吊不起来货物,甚至还可能导致起重臂损坏。
反过来,如果动力臂太长,阻力臂太短,虽然能轻松吊起货物,但可能会浪费很多能量,而且起重臂的稳定性也会受到影响。
再想想我们的日常生活,其实杠杆原理公式也无处不在。
比如我们用撬棍撬石头,用剪刀剪纸,甚至是我们用筷子夹菜,都或多或少运用到了杠杆原理。
只是我们平时可能没有注意到罢了。
对于学习船舶相关知识的同学们来说,理解和掌握杠杆原理公式是非常重要的。