INMARSAT航空卫星通信系统及其频率校正
新航行系统复习资料

VOR omni-directional rangingDME distance measurement equipmentNDB non-directional beaconVHF1、新航行系统新航行系统是基于卫星技术为基本特征的全球新通信导航监视和空中交通管理系统。
导航是系统的核心,通信是系统的必要条件,监视是安全保障的手段。
(CNS/ATM系统)。
2、导航导航是引导航行的意思,也就是引导舰船,飞机等运载体按照预定的要求进行航行的过程。
CNS/A TM系统中的导航系统是通过引入星基导航系统来提供全球精确、可靠和无隙的定位服务。
3、RNA V /RNPRequired navigation performance Area navigationRNP定义为在一条指定的航线上,飞机在一个给定的概率上保持的最大偏差值。
RNP是对规定空域内导航性能精度的一种表示,综合了导航传感器误差、机载接收机误差、显示误差和飞行技术等误差。
航路RNP类型可以由单一的精度数值确定,该值被定义为某一特定包容面内所需的最低导航性能精度。
区域导航(RNA V)是一种导航方法,允许飞机在台基导航设备的基准台覆盖范围内或自主导航设备能力限度内,或两者配合下按任何希望的飞行路径运行。
4、ATN Aeronautical telecommunications network新航行系统将形成的航空电信网(ATN)是适应航空计算机应用的发展和航空管理自动化的需求而组成的空地一体化的数据信息交换网络5、ADS和ADS-BAutomatic dependent surverllance-broadcast /addressed/contract /panel/ report自动相关监视(ADS)是用飞机机载自主导航设备提供得信息监视飞机运行得一种技术,是一种全新得监视系统,它将改变过去沿用得使用地面设备或地面计算来监视飞机活动的方法。
Automatic是指飞机上的各种信息是自动发送、自动收集处理、自动显示的;Dependent 是指监视要依据飞机提供的各种飞行信息。
Inmarsat卫星移动通信汇总

Inmarsat卫星移动通信汇总Inmarsat卫星移动通信汇总简介Inmarsat是一家全球领先的卫星通信服务提供商,成立于1979年。
该公司提供广泛的卫星通信服务,包括语音通信、数据传输、互联网接入、远程监控等。
Inmarsat的服务覆盖全球各个区域,包括陆地、海洋和航空。
服务特点全球覆盖:Inmarsat的卫星系统覆盖全球范围,可以提供服务给任何地方。
高可靠性:Inmarsat的系统采用多星座多频段设计,具有高度的冗余性和容错能力,可以保证通信的稳定性和可靠性。
高速数据传输:Inmarsat的卫星系统支持高速的数据传输,可以满足各种应用的需求,包括远程办公、视频会议、数据备份等。
安全保密:Inmarsat致力于保护用户通信的安全和保密,采用先进的加密和认证技术保障用户数据的安全传输。
多种应用场景:Inmarsat的卫星通信系统可以应用在多种场景,包括航空、海洋、军事、能源、交通等领域。
主要产品与服务1. BGAN(Broadband Global Area Network):提供高速互联网接入服务,可以在全球范围内实现宽带连接。
2. FleetBroadband:针对航海领域提供的高速数据传输服务,支持语音通信、电子邮件、互联网接入等。
3. SwiftBroadband:为航空领域提供的高速数据传输服务,可以实现机上互联网接入、、语音通信等功能。
4. IsatPhone 2:面向移动用户的卫星方式,可以在全球任何地方进行语音通信和短信发送。
5. IsatData Pro:面向物联网应用的卫星数据传输服务,可以实现远程监控、数据采集等功能。
应用领域分析航空领域:Inmarsat的卫星通信系统为航空公司提供了高速数据传输和互联网接入服务,可以提升飞行体验,加强机组和地面的实时沟通。
海洋领域:海上船只可以通过Inmarsat的卫星通信系统实现远程监控、交流和应急通信等功能,提高船舶的安全性和工作效率。
inmarsat bgan系统

全球波束 Global Beam (3) 1 全球(例如 I2/I3)
Inmarsat D Inmarsat E
FleetBroadband
其他
Signalling for E&E
BGAN SMS
I-4 卫星
反馈连接 用户连接
I-4 卫星波束架构和功能
打开终端开关
SAS 全球波束
指示 收到全球波束 SIB 选择波束
Inmarsat BGAN介绍
第7页
什么是BGAN ?
• BGAN 是通用移动通信系统准予的4个网络,有别于其他的网络: – BGAN 具有专属的卫星无线接口 (“IAI-2”) – BGAN 经由Inmarsat I4 (第四代) 卫星运行 – BGAN 的地面接收为 Inmarsat 卫星接入站 • 陆用BGAN 服务于2005年12月引入 • 后续产品的升级更新将继续使用此系统
FB/BGAN 安全性: 内置的保护
IP 核心网络
WWW Server
DP POP
Internet
Burum SAS
Customer
HQ
DP PoP 站安全性 每一个DP设置不同 通用的DP与用户连接 IP 网络的 VPN : IP 二次加密 防火墙保护
FB/BGAN安全性: 内置的保护
• 电源控制设定 • 切换控制 • 加密 • 程序分段/重组
• 信号广播
BGAN 地面网络
Burum SAS 站 Fucino SAS 站
RF/IF
RF/IF
RF/IF
RF/IF
RAN 1
RAN 2
RAN 3
RAN 4
核心网络
PSTN/ISDN 互联 商业支持 系统 BOC
Inmarsat-F和Inmarsat-C船站的维护和检测

船舶电子电气专业工艺评估指导书(通信导航设备部分)天津海运职业学院船电教研室2012.08.15.Word 资料船舶通信(GMDSS)设备一.GMDSS配置(总表)二. GMDSS 实施设备可用性岸上维修shore-based maintenance :应具有生产或船级社认可的设备陆上维修证书;海上维修at-sea maintenance :船舶应配备所有设备的技术资料和足够的备品、备件、测试设备及合格的维修人员;双配套duplication of equipment :可按照预订通过的海区附加配备无线电设备,每一附加设备应与各自天线相连,其安装可随时可用;配置方式必经船检社认可:A1和A2航区船舶至少使用上面三种的一种;A3和A4航区船舶至少综合使用上面三种的两种;三.海上无线电通信基础知识实现信息传输的系统称为通信系统,系统结构如下信号源可以分为模拟信号和数字信号原始信号(基带信号)的参量取值为连续的电信号为模拟信号(如语音话筒输出)原始信号(基带信号)的参量取值为仅可能取有限个值(离散)为数字信号(如电传机,计算机输入输出) 发送设备作用是将来自信号源的原始信号转换成为适合在信道中传输的信号接收设备的作用是将接收到来自信道的、受到减损的信号中还原或反变换出原始电信号、传送给受信者 发送器设备和接收器设备是一种变换器,又称调制解调器模拟调制AM (SSB/DSB) PM FM数字调制PSK 、ASK 、 FSK (2FSK)模拟通信系统经过调制后的已调信号(模拟信号或数字信号)连续信息的传输后再经解调还原基带信号 传输有效性可用有效传输频带来衡量数字通信系统模拟信号源输出幅度随时间连续变化的电信号或离散信源输出地离散电信号变换形成有代表信息的数字信号序列进行传输,为了减少传输差错,信号编码的码元中按一定规则加入抗干扰编码,提高通信可靠性;因而必须解决收发同步的问题。
传输有效性可用信息传输速度来衡量(b/s)模拟通信系统模型船上典型设备:SSB VOICE,NBDP,DSC,VHF数字通信系统模型船上典型设备: INMARSAT 系统信道按传输媒质分有线信道:架空明线、电缆、光纤等 缺点:空间受限制 无线信道:天波和地波传输不同的信道具有不同的工作频率范围,适宜不同信号传输, 由信道引起的幅度衰减和附加相移是不同的。
INMARSAT-C 说明书
INMARSAT-C船站操作第一章概述一、系统概述Inmarsat-c系统是采用数字通信技术、运用存储转发方式的全球卫星通信系统。
它可以发送电报数据或电子邮件,传递速率为600比特/秒,大约为普通电报传递速率的12倍。
任何义勇数字技术编码的信息,都可以通过Inmarsat-c系统进行接收和发送。
Inmarsat-c系统对国际、区域、国内公共及专用通信网提供接入方式,可以和陆地数据交换网(X。
25,X。
400)进行电传、数据和电子邮件的通信。
Inmarsat-c移动地球站是一种外形轻巧、价格低廉、安装简便、耗电量小、通信费用便宜的卫星移动通信设备。
它的全向天线能满足用户在行进中不间断通信的要求,而且能够接收EGC信息。
这些特点使得Inmarsat-c移动地球站不仅大量用于海上移动,而且还应用于陆地和空中的移动通信。
二、系统组成1、空间段:海事通信卫星、卫星控制中心、全球遥测遥控站。
卫星覆盖区:大西洋东:AOR-E 大西洋西:AOR-W太平洋:POR 印度洋:IOR2、网络协调站(NCS)协调控制船站与岸站的通信联网。
受理船站的入网登记。
3、岸站(LES)它是船站接入陆地通信网络的接口。
岸站码组成:参考书P 98 倒数第13行。
岸站码=洋区代码+ 自识别码洋区代码大西洋西:AOR-W 0大西洋东:AOR-E 1太平洋:POR 2印度洋:IOR 3各洋区的例如:在太平洋使用北京岸站。
北京岸站的自识别码为11。
所以在太平洋的北京岸站码为211。
4、船站(MES)分3个等级:等级1:只能进行船对岸、岸对船的电报和数据通信。
等级2:除了具备等级1的功能外,还能在通信空闲时接收EGC信息。
(一般配备该等级的设备)等级3:除了具备等级1的功能外,还能在正常通信时接收EGC信息。
船站识别码=4+移动终端国家码+自识别码中国设备国家码为412。
船站识别码为9位数。
参考书P99三、C系统业务1、存储转发电报2、遇险报警和遇险优先等级电文3、EGC安全通信网四、C船站的组成1、数据终端设备DTE作用:对船站工作状态的操控。
inmarsat系统概述

INMARSAT系统概述一、I NMARSAT组织该组织是一个提供全球范围内卫星移动通信的政府间合作机构。
即国际移动卫星组织。
该组织成立于1979年,总部设在伦敦。
拥有86个签约成员国。
我国委派交通部北京船舶通信导航公司作为中国的签字者。
二、I NMARSAT系统构成1.卫星(SAT)使用静止轨道卫星(同步卫星),位于赤道上空35700公里,覆盖70°N~70°S区域。
单颗卫星覆盖地球表面3/1区域,全球使用四颗工作卫星,分别覆盖四个洋区(POR IOR AOR—E AOR—W)。
卫星位置分别在POR 178°E,IOR64.5°E,AOR—W 15.5W, AOR—E 54°W。
相邻的卫星之间有重叠覆盖区。
目前,卫星已发展到第四代。
2.船舶地球站(SES)提供A船站(1982),B船站(1994),C船站(1989),M船站(1993),F船站(2002) 等多种船用终端。
除M站以外,A 站,B站,C站,F站都能满足GMDSS 要求。
3.海岸地球站(CES)或称陆地地球站(LES)岸站是卫星通信的接口。
作用相当于地通的岸台。
每个洋区都有专门服务于该洋区的岸站,设于不同的国家,数量可达15个。
例如中国北京岸站,日本YAMAGUCHI岸站。
4.网络协调站(NCS)NCS是洋区通信指挥员,每洋区一个,负责本洋区卫星通信协调,管理和监控。
全球一共4个NCS。
5.网络控制中心(NCC)或称(OCC)NCC 全球一个,设在伦敦。
它是全球卫星通信总指挥。
6.卫星测控站(TT&C)每洋区一个,负责跟踪遥测本洋区卫星,并把数据送SCC处理。
并根据SCC指令控制卫星姿态。
7.卫星控制中心(SCC)全球一个,设在伦敦。
通过测控站对卫星进行控制和管理。
三、INMARSAT通信的优先级别P0(常规),P1(安全),P2(紧急),P3( 遇险)四、INMARSAT通信频率星→船 1.5GHZ频段船→星1.6GHZ频段(L波段);星→岸4GHZ频段岸→星6GHZ频段(C 波段)。
航行无线电设备功能简介
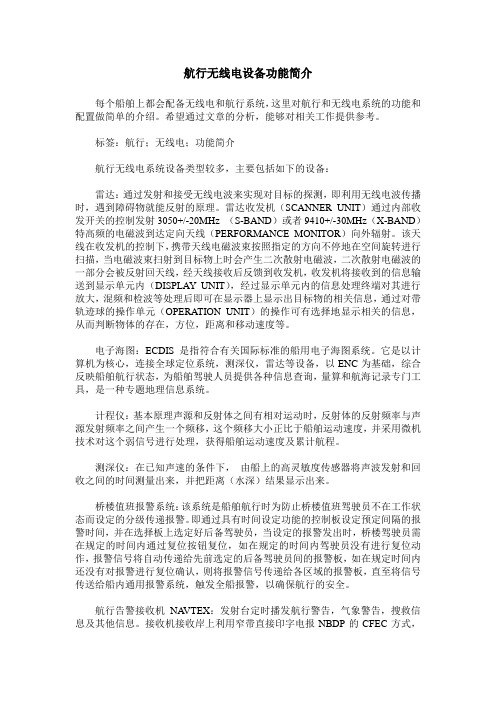
航行无线电设备功能简介每个船舶上都会配备无线电和航行系统,这里对航行和无线电系统的功能和配置做简单的介绍。
希望通过文章的分析,能够对相关工作提供参考。
标签:航行;无线电;功能简介航行无线电系统设备类型较多,主要包括如下的设备:雷达:通过发射和接受无线电波来实现对目标的探测,即利用无线电波传播时,遇到障碍物就能反射的原理。
雷达收发机(SCANNER UNIT)通过内部收发开关的控制发射3050+/-20MHz (S-BAND)或者9410+/-30MHz(X-BAND)特高频的电磁波到达定向天线(PERFORMANCE MONITOR)向外辐射。
该天线在收发机的控制下,携带天线电磁波束按照指定的方向不停地在空间旋转进行扫描,当电磁波束扫射到目标物上时会产生二次散射电磁波,二次散射电磁波的一部分会被反射回天线,经天线接收后反馈到收发机,收发机将接收到的信息输送到显示单元内(DISPLAY UNIT),经过显示单元内的信息处理终端对其进行放大,混频和检波等处理后即可在显示器上显示出目标物的相关信息,通过对带轨迹球的操作单元(OPERATION UNIT)的操作可有选择地显示相关的信息,从而判断物体的存在,方位,距离和移动速度等。
电子海图:ECDIS是指符合有关国际标准的船用电子海图系统。
它是以计算机为核心,连接全球定位系统,测深仪,雷达等设备,以ENC为基础,综合反映船舶航行状态,为船舶驾驶人员提供各种信息查询,量算和航海记录专门工具,是一种专题地理信息系统。
计程仪:基本原理声源和反射体之间有相对运动时,反射体的反射频率与声源发射频率之间产生一个频移,这个频移大小正比于船舶运动速度,并采用微机技术对这个弱信号进行处理,获得船舶运动速度及累计航程。
测深仪:在已知声速的条件下,由船上的高灵敏度传感器将声波发射和回收之间的时间测量出来,并把距离(水深)结果显示出来。
桥楼值班报警系统:该系统是船舶航行时为防止桥楼值班驾驶员不在工作状态而设定的分级传递报警。
国际海事卫星通信系统介绍

国际海事卫星通信系统介绍北京米波通信技术有限公司二零零九年十一月国际海事卫星通信系统介绍目录1 系统概述 11.1 INMARSAT发展背景 (1)1.2 INMARSAT在卫星通信领域的重要性 (1)1.3 INMARSAT的应用 (2)1.4 INMARSAT通信体制和技术参数 (2)1.4.1 通信体制 (2)1.4.2 频率范围 (2)1.4.3 调制方式 (3)1.4.4 编码方式 (3)2 INMARSAT系统的构成 32.1 空间段 (3)2.2 地面段 (5)2.2.1 卫星控制中心(SCC) (6)2.2.2 网络控制中心(NCC) (6)2.2.3跟踪遥测指控站(TT&C) (6)2.2.4 网络协调站(NCS) (6)2.2.5 地面关口站(LES) (6)3 INMARSAT系统的移动终端73.1 INMARSAT-B (8)3.2 INMARSAT-C (8)3.3 INMARSAT-M (9)3.4 INMARSAT Mini-M系统 (10)3.5 INMARSAT-Aero (10)3.6 INMARSAT-F (11)3.7 BGAN终端 (12)3.8 ISATPHONE终端 (13)1 系统概述1.1 INMARSAT发展背景国际海事卫星通信系统简称INMARSAT,于正式成立,成员国由当时的28个已发展到目前的近百个,INMARSAT总部设在伦敦,主要负责操作、管理、经营INMARSAT系统的政府间合作机构。
现已成为世界上唯一为海、陆、空用户提供全球移动卫星公众通信和遇险安全通信业务的国际组织。
INMARSAT卫星通信最初只提供海上通信业务,它向广大的海上用户提供遇险呼叫、紧急安全通信、电话、用户电报、传真、各种数据传输、无线电导航等二十余种通信业务。
1982年开始提供全球海事卫星通信服务。
随着新技术的开发,1985年10月,INMARSAT大会通过了INMARSAT公约和业务协定的修正案,决定把航空通信纳入业务之内。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
差 值, M 为修 正因 子, M = F A U + FPC 3. 2 AD ) . AES 中的频率校正
A D / ( F PL
图 4 A ES 多普勒频移的形成
当飞机的飞行方向与卫星的漂移方向相向或相 对时 , 卫星漂移造成的多普勒频移和飞机飞行造成 的多普勒频移正好相加 , 这时 A ES 收到信号的 频 率偏差也最大, 如图 4所示。 在 IN M ARSA T 航空卫 星通信系 统中 AE S 收到信号的最大多普勒频移可达到 3 000 H z, 对于像 R 信道这样带宽只有 2. 5 kH z 信 号 , 如果 A ES 发不采取校正措施 , 那么转发器上信 号必然重叠 , GE S 不能正确接收。 IN M ARSAT 航空卫星通信系统中, 可采用两 种方法完成频率校正 , 由于 P 信道是一条连续的广 播信道 , 各 A ES 都可以收到, 而且要想进入系统的
F
F CC
A D / ( F PC
A U + FPL
A D)
式中 F CC 为 C 波段标称通信信号发送频率 , 在 IN M ARSAT 航 空 卫 星 通 信系 统 中 定 义 正 因 子 M = F CC 校正量为 A D / ( F PC F A U + F PL A D ) , 因此实 际 M。 M 是一个同上行和下行多普勒
Abstract Key words
T he r ationale feat ur es, im plementa tio n and app lica tio ns o f f ram e r elay t echno log y ar e intr oduced in t his p ap er and fra me r elay , br oa dband serv ice , L A N , W A N
1
航空卫星通信系统的组成 参 考 文 献
2 1995
图1
INM A RS AT 航空卫星通信系统
Pres ton D . Fr am e rela y in th eor y an d p ractice . B ritis y T eleco m mu nication s E n gineer in g, 1994, 13 ( Par t 2)
20
电 信
科
学
1997 年
GE S 至少有一条 P 信道 , 所传送的主要内容有系统 表、 信道分配信息等。 P 信道在逻辑上可分为管理信 道 ( P sm c) 和数据信道 ( P d) , Psm c 和 Pd 在物理上 可以是同一条信道 , 也可以是分立的信道。 ( 2) R 信道 R 信道是时隙随机访问信道 ( S - A L OH A) , 是 由 AE S 发往 GES 的后向信道 , 所传送的主要内容 有 A ES 申请信道信息和短突发数据。 R 信道在逻 辑上 可 分为 管 理信 道 ( Rsm c) 和 数 据信 道 ( Rd) , Rsm c 和 Rd 在物理上可以 是同一条信道 , 也可以 是分立的信道。 ( 3) T 信道 T 信道是预约时分多址信道 ( R - T DM A ) , 是由 AES 发往 GES 的后向信道, 所传送的信息主要是 数据。 ( 4) C 信道 C 信道 是按申 请分 配的 单路 单载 波信 道 ( SC P C/ DA) , 该信道由逻辑上的两条信道复用, 一 条用来传送空地之间话音, 一条用来传送子带数据 业务。 C 信道是双向信道 , GE S 发往 A ES 称为前向 C 信道 , A ES 到 GE S 称为后向 C 信道 , 前向 C 工 作在话音激活模式 , 后向 C 工作在连续模式。 在系统中 GES 到卫星 之间采用 C 波段传 送 ( 收 3 600 GH z ~ 3 629 GH z, 发 6 425 GH z ~ 6 454 GH z) , A ES 到 卫 星 之 间 采 用 L 波 段 ( 收 1 530 GH z ~ 1 559 GH z, 发 1 626 . 5 GH z ~ 1 660 . 5 GH z) 。
3
航空卫星通信中的频率校正
航空卫星通信系统中 , 飞机是高速移动的通信
平台 , 多普勒效应非常严重 , 再加上卫星的漂移 , 多 普勒频偏最大可大于 3 kH z 。 对于以 2. 5 kH z 为信道 间隔的 P , R 信道 , 如果不采取校正措施 , 是不可能
第7期
刘爱军等: INM A RS AT 航空卫星通信系统及其频率校正
因子有关的量 , 在系统中不同位置的 G ES 所对 应 的 M 值由系统给出。 GES 收频率校正是通过接收 L 波段到 C 波段 的导频来完成的。由 IN M ARSAT 指定的 GE S 发 送L - C 导频, 其它各 GES 站的 C 波段导频接收机 接收此信号 , 并检测其与标称值的差 , 以此为依据来 纠正 C 波通信信号的收频率, 使接收正确进入解调 滤波器内。 此频差主要是由于卫星本身相对于 GE S 的 多普 勒频 移和 L- C 转 发器 的频 率漂 移所 引 起 的。 GES 收 频 的 校 频 方法 是 一 样 的 , 校 正 量 为 F M , F 为 C 波段 L- C 导频相对标称值的偏
的应用对未来卫星移动通信的发展提供了宝贵经验。本文对该系统的组成、 典型工作过程, 以及系统中频率校正方法 作了讨论, 并给出了我们研制的单收系统的解决方案。 关键词 航空卫星通信系统 多普勒频偏 频率校正
国际海事卫星组织 IN M ARSA T 创建于 1979 年, 早期主要提供全球的岸 船、船 船之间的通 信, 是进行卫星移动通信开发与应用的先驱 , 现改称 为国际移动卫星通信组织, 其未来的 IC O 系统不仅 仅限于为车、 船、 飞机提供通信 , 其目的将是满足全 球范围内个人通信的需求。 I NM A RSAT 航空卫 星通信系统是 一个面向 机上用户 , 以提供话音和数据通信业务为主的移动 卫星通信系统 , 另外它还可以传输更加可靠的空中 交通管理 ( AT M : Aer onaut ical T r af f ic M ana g e m ent ) 、自动相关监测 ( ADS: Aut o mut i c Depen dence Surv eillance) 和其它有关飞行操作控制信 息。在全球范围内 , 已有十多个地面地球站 ( G ES) 在工作, 有近千架飞机装有机载地球站 ( A ES) , 我 国南方航空公司新采购的波音 777 客机上就装有 AE S 。
(收稿日期: 1996 - 09 - 02, 改定日期: 1997 - 01 - 25 )
t he fr ame relay technolo g ical pr ospects in t he teleco mmunicatio n netw or k ar ena are envisio ned.
图 2 A ES 为主叫的通话过程示意图
上分配 AE S 到 GES 之间通信的前向和后向 C 信 道的信道号 , AE S 收到分配的信道后 , 在后向 C 信 道的子带数据信道发送呼叫信息 , 主要包括 AE S ID 、 GE S ID 、 被叫地址等信息。GES 收到呼叫信息 后发送到地面网络, GE S 和地面网络之间的交互完 全符合地面网络的协议, 在等待地面网络送来应答 信号的过程中, G ES 和 AE S 之间在 C 信道子带数 据信道发送测试信号 , 这时 AES 和 G ES 之间的话 音通路也是导通的 , AES 用户可在其中听到回铃 音 ; G ES 在收到地面用户摘机信号后 , 向 AE S 发送 线路接通信号, AE S 收到后向 GE S 发送证实信号 , 这时双方可以开始通话过程。通话完毕后 , 可以是 AE S 主挂也可是地面用户主挂。当 AE S 主挂时 , AE S 通过后向 C 子带数据信道向 GE S 发挂机信 号 , 同时关闭载波, GE S 收到挂机信号或 AE S 载波 关闭后 , GES 停止发送并通过地面网络通知地面用 户 , 完成通话过程。 当地面用户主挂时 , GE S 收到挂 机后, 向 A ES 发送挂机信息 , 同时关闭载波 , AE S 收到挂机信息后 , 向 GE S 发挂机证实同时关闭载 波 , 完成通话过程。
1
薛兴华. 计算机 通信网 络及组 网方式 . 北 京: 机 械工业 出版社 ,
FR Technol ogy of Broadband Tel ecommunication Network
Xue Xinghua
(Jiangsu Pos ts and T eleco mmun ications A dmin istration, Nan jing 210003 )
1997 年 7 月 第 13 卷第 7 期
T EL ECOM M UN IC AT IONS S CI13 No. 7 July 1997
INMARSAT 航空卫星通信系统及其频率校正
刘爱军 杨喜根 张更新 吕 晶
(通信工程学院 南京 210016 )
摘要
IN M A RSA T 航空卫星通信系统是 90 年代投入实用的第一个面向机上用户的移动卫星通信系统, 其成 功
2
航空卫星通信系统的典型工作过程
下面我们以机上乘客呼叫地面用户为例来介绍
航空系统的典型工作过程( 目前, 该系统出于管理和 安全方面的考虑, 禁止地面用户呼叫机上用户 ) , 如 图 2 所 示。要想 进入该系 统的 AE S 必 须向某 一 GE S 进行注册, 注册时 AES 首先在 GES 的 Rsmc 信道上发出注册请求, 并在该 GES 的 P smc 信道上 等待 GES 的证实信息, 该证实信息包括 AE S 可工 作的 Rd 信道和 P d 信道的信道号 , A ES 一旦收到 证实信 号后就 在分配 的 Rd 信道 和 Pd 信道上 和 GE S 进行确认 , 完成确认后该 AE S 进入 工作状 态。检测到用户摘机拨号信号后, A ES 在 Rd 上向 GE S 发送话音信道申请, GES 收到以后在 P d 信道