基于二维元胞自动机的网络模型
元胞自动机简介
元胞自动机基础元胞自动机(cellular automaton, CA)是最近一个比较热门的研究课题,其是物理、数学、计算机和生物等学科的交叉产物。
在计算机领域中,CA在人工智能、计算复杂性分析以及加密等多个领域中有着较大的用途。
特别是在大约十年前,密码学家H. Gutowitz根据CA的基本原理,提出了分块加密算法CA-1.1,使得CA在密码学中真正的迈出了第一步,也使得越来越多的密码学家开始了对CA的研究。
最近,我也开始对这个方面产生了浓厚的兴趣,并开始了一些学习,就先来简单的说说什么是CA吧!简单的说,元胞自动机是一个空间、时间和状态上都离散的动态系统。
构成CA的基本单位成为元胞(cellular),规则的分布在元胞空间(spatial lattice)的格点上,且各自的状态随着时间按照一定的局部规则变化。
也就是说,元胞的状态只能从一个有限的状态集中取值,每个时刻元胞的状态仅与其自身和邻居在上一时刻的状态有关,并且,所有的元胞在每个时刻均是同时更新的。
以上即是对CA的一个定性的描述,下面给出一个基于集合论的定量描述(L. Hurd等):设d为CA空间的维数,k代表元胞的状态,集合S表示CA的整体状态,r表示元胞的邻居半径。
为了简单起见,我们在d=1,即一维空间上对CA进行讨论。
CA的动态性可以由一个全局函数F: St→St+1决定,并且,每个元胞的状态可以由一个局部函数f:kt→kt+1决定。
由于多维空间的CA具有很强的复杂性,故目前对CA的研究主要集中在一维和二维空间。
就一维空间而言,CA的结构显然只有可能是线性结构。
在二维空间,CA的结构可能有三角、四边或多边等构成方式。
显然,结构上的差异会对其在计算机表示及其他部分特性上带来一定的差异。
而CA 的邻居结构也通常包括Von. Neumann、Moore、扩展Moore和Margolus等多种形态,不同的邻居结构带来的特性和复杂度也不尽相同。
基于元胞自动机模型的人员疏散行为模拟

基于元胞自动机模型的人员疏散行为模拟郭良杰;赵云胜【摘要】通过引入静态场、动态场及其他参数,建立了二维元胞自动机模型,并利用MATLAB编写模拟软件,可实现对人员疏散过程中的环境熟悉度、从众行为、摩擦阻碍作用、惯性行为、拥挤跌倒行为和竞争行为的模拟.通过实例仿真模拟结果表明:不同的期望速度下会出现“欲速则不达”的现象,同时出口处会产生不同程度的人员聚集;出口处障碍物相对出口纵向放置比横向放置更有利于人员疏散;在疏散环境陌生,或紧急情况下对环境判断能力降低时,适当的从众行为利于最优疏散路径信息的传递,从而有利于人员疏散,但是从众行为过于严重则易造成出口利用率降低或利用不平衡.【期刊名称】《安全与环境工程》【年(卷),期】2014(021)004【总页数】6页(P101-106)【关键词】元胞自动机;地面场模型;人员疏散行为;仿真模拟;从众行为【作者】郭良杰;赵云胜【作者单位】中国地质大学工程学院,湖北武汉430074;中国地质大学工程学院,湖北武汉430074【正文语种】中文【中图分类】X913.4近几年我国灾害频发,如近期发生的雅安地震、吉林宝源丰禽业公司氨气泄漏爆炸火灾以及厦门BRT公交车火灾等。
灾害发生后,人员聚集场所的紧急安全疏散再次成为人们关心的问题和研究的热点。
国内外针对此方面的研究主要集中在对紧急条件下疏散时间和人员逃生行为特征的研究,但由于实际数据的缺乏和实验准确性的不足,建立人员疏散模型并利用计算机进行仿真模拟已成为研究人员疏散行为的主要手段之一[1]。
目前较常用的人员疏散模型有连续型(社会力模型等)和离散型(格子气模型、元胞自动机模型等)之分。
本文基于元胞自动机模型对人员疏散过程中的现象和疏散行为进行了定性研究。
1 元胞自动机模型建立1.1 元胞自动机简介元胞自动机(Cellular Automata,CA)是由大量简单一致的个体通过局部联系组成的离散、分散及空间可扩展系统,它是在均匀一致的网格上由有限状态的变量(元胞)构成的动力系统[1]。
基于二维元胞自动机的交通流模拟分析
4 . 2 自组 织 现 象
梅
宏 ,等 :基 于二 维元胞 自动机 的 交通 流模 拟 分析
4 5
在 实际交 通 网络 中 , 经 常 出现交 通 阻 塞 现象 ,车辆 密 度 越 高 阻 塞越 严 重 ,只 要 车 辆按 交 通 规 则 行进 , 车辆 密度 一定 时 间 内不 增 加很 多 ,经 过 足够 长 时 间 必会 自行 解 决交 通 阻 塞 现象 ,称 之 为 系统 的 自组 织性 . 从 程 序仿 真 中可 以清 晰看 到 ( 见图 5 ) , 平 均 速 度 接 近 于零 时 , 也 即几 乎 没有 车辆 行驶 ,但 随 着 迭代 步 数 的 增 多 ,系统 多数会 自身调 整 ,逐步 解 开阻塞 状 态 ,恢 复 自由运 动 ,而且 速度 逐步 提高 , 最 后趋 于稳 定.
2:2 21 D L E T ON A A, L E VI NE D .S e l f Or g a n i z a t i o n a n d a D y n a mi c a l T r a n s i t i o n i n Tr a f f i c F l o w Mo d e l s E J ] .
5 研 究 结 论
针 对 二 维 路 网交 通 流 ,本 文 首 先 利 用 经 典 B MI 模 型 重现 了有 关 网格交 通 流 的 自由相 、堵 塞 相 等典 型 车 流
状 态 ,验证 了交 通 流各 种 状 态 随 车 辆 密度 增 大 引发 的相
图 6 1 2 8×1 2 8交 通 网络 不 同 红 灯 周 期
E 5 ] 葛红霞 , 祝 会 兵 ,戴 世 强 .智 能 交 通 系 统 的 元 胞 自动 机 交 通 流 模 型 E J ] .物 理 学 报 , 2 o o 5 ,5 4 ( 1 0 ) : 4 6 2 1 —4 6 2 6 . [ 6 ] 刘小 明 , 李 颖 宏 ,陈 昱 ,等.基 于 改 进 B ML模 型 的交 通 事 故 下 路 网 交 通 运 行 状 态 分 析 [ J ] .交 通 运 输 系 统 工 程 与 信
基于二维元胞自动机的网络模型
(. hn beGopP s nIstt C .Ld, ei 00 0,C i ; . et fEetncE gnen ,Ti h a U i  ̄ y B in 1 C i Moi ru eg ntu o t B in 10 8 a l i ie jg hn 2 Dp.o l r i n i r g s g u nv h , ei a co ei n e jg
摘
要 :针 对一维元胞 自动机 网络模 型的 转发 过程 随机 化 , 维模 型缺乏 拥塞 特性 分析 的 缺 陷, 出了一种基 二 提
于二维元胞 自动机 的网络 模型 。根 据 T P I C /P拥塞控制协 议设 计 了元 胞更 新规 则 , 设置 不 同的元胞 队列长度 并
以增强 网络 的异构性 。利 用该模型 仿真得到 了拥塞相 态下的节 点 负载 、 点处理 延 时具有 白噪 声特性和 1f噪 节 / 声特性 。通过该 模型观测 到局部 网络与整 个网络 负载特性 的关 系, 明该二 维元 胞 自动机 网络模 型具 有可扩展 表 性 , 用于大规模 网络的行 为建模研 究。 适
10 8 C i ; . un nC m u rCne,Y na n e i , u mn 5 23, hn ) 0 04, hn 3 Y n o p  ̄ et a a r u nnU &mt K n ig6 0 2 C ia y
Ab t a t Ai n oi r v h h rc mi g u h a a d m o w r ig a d l c ig a ay i o o g sin i n — i n sr c : mi g t mp o e t e s o to n s s c s r n o fr a dn n a kn n lss fc n e t n o e dme — o so a n . i n in l el lra tmain mo e . hsp p rp o o e e r d l a e n t et o d me s n le l i n l d t dme so a l a u o t d 1 t i a e r p s d an t k mo e s d o h w . i n i a e — a wo c u o wo b o l lra tmao .T e t n i o ue o el a e in d i c o d n e w t C / P c n e t n c nr l r tc 1 n h e — ua uo tn h r st n r l fc l w sd sg e n a c r a c i T P I o g si o t oo o .a d t e c l a i s h o op l lri h d l swi i e e t u u e gh i r e oe h n et eh tr g n i ft en t o k h e s lt n rs l ua te mo e t df r n e el n t n o d r n a c h ee o e et o e w r .T i ai eu t n wa h f q t y h mu o s
一种自组织的二维元胞自动机网络模型及分析

0 引言
 ̄t t e 已经 发展 成一个由多类业务 、 me 多种协议 和不 同拓 扑结构等组成 的复杂系统 , 现 出更 加复杂 的动态特 性和异 呈 构特征 。了解这个复杂系统 的动态特性对于高效率协议 的设 计和高性 能网络 的构建 有着重要 意义 , 已经 有越来越 多 的研 究人员投入到 了对它 的研究之 中。
Jn u e姗ຫໍສະໝຸດ 种 自组 织 的二 维元 胞 自动 机 网络模 型 及分 析
贺 正求 贺建 民 张叶琳 , , (. 1 解放 军理 工大 学 指挥 自动化 学 院 , 江苏 南京 200 ; 107 2 解放 军理 工 大学 通信 工程 学 院 , . 江苏 南京 200 ) 107 ( zzl 6 . o ) hqy@1 3 cr n
Ab t a t s r c :A e -r a ie ewok mo e a e n t o d me so a e u a u o t n Wa r s n e .W e s d e h s l og n z d n t r d lb s d o w . i n i n lc l l r a tmao s p e e t d f ti d te u c i c h r c e s c a d l n -a g e e d n e i h ewo k . E ey c l i e mo e o rs s o e r ue n a d m r ia c a a tr t n o g r n e d p n e c t e n t r s tl ii n v r el n t d lc mp e n o t ra d rn o h i n mb ro o t, a d i C g l t h a e o a k tr la e o e h ss a c r i g t e c n e t n sae p r ev d b h u e f ss n t a r ua et e r t fp c e e ft 、 o t c od n o t o g s o tt e c ie y t e h n e e s h h i c l.I i s o n t a n e e c n rlo e c n e t n c n r 1 c a im,t e n t o k i p ie tc t a tt , at o g e1 t s h w t d rt o t f o g s o . o to. h u h o h t i me h ns h e w r s os d a r i l sa e lh u h i c
融合多源信息的元胞自动机交通流模型

融合多源信息的元胞自动机交通流模型随着城市化进程的不断发展和交通流量的快速增长,如何合理优化城市交通系统成为了亟待解决的问题。
为了解决交通流量管理中遇到的挑战,研究人员开始使用元胞自动机交通流模型作为一种有效的工具。
元胞自动机交通流模型结合了多源信息,并能够对城市道路网络中的交通流进行模拟和预测。
本文将重点介绍融合多源信息的元胞自动机交通流模型,并详细分析其优势和应用前景。
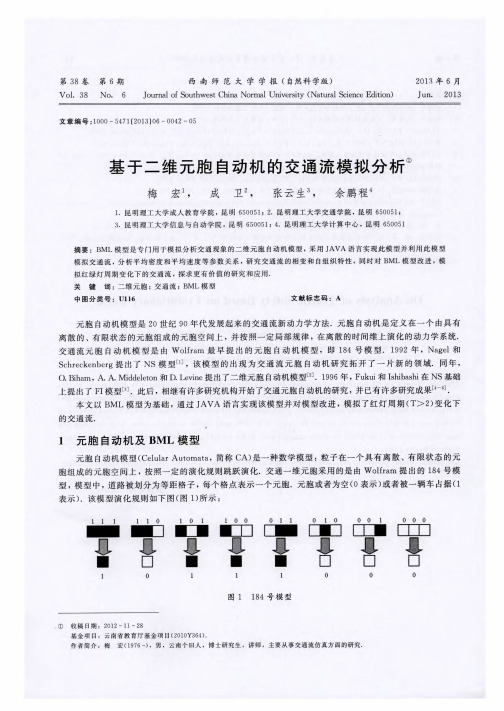
一、元胞自动机交通流模型简介元胞自动机交通流模型是一种基于交通流动的个体自动行为的模拟方法。
它将整个道路网络划分为多个元胞,每个元胞代表一个交通单元,如车辆或行人等。
通过定义元胞之间的规则和交互方式,模型可以刻画城市道路系统中的交通流动情况。
元胞自动机交通流模型使用自动机理论和网络拓扑结构相结合的方法,具有模拟真实交通行为的优势。
二、多源信息融合的意义和方法多源信息的融合对于提高交通流模型的准确度和预测能力至关重要。
常见的多源信息包括道路网络拓扑结构、车辆速度、交通信号灯状态、道路岔口等。
通过合理融合这些信息,可以更好地模拟城市交通流动的实际情况。
在元胞自动机交通流模型中,多源信息融合的方法主要包括以下几种:数据融合、模型融合和参数融合。
数据融合是将来自不同数据源的交通数据进行处理和整合,以获取全面准确的信息。
模型融合是将不同类型的交通模型进行整合,并基于多种模型的结果进行预测和优化。
参数融合是将不同参数的评估结果进行整合,以获取更加全面和准确的评估结果。
三、融合多源信息的元胞自动机交通流模型的优势融合多源信息的元胞自动机交通流模型相比传统模型具有以下优势:1. 准确性提高:多源信息的融合使得模型更加贴近真实交通情况,模拟结果更准确可靠。
2. 鲁棒性增强:多源信息的融合使得模型对于数据噪声和不确定性具有更好的适应和鲁棒性。
3. 预测能力增强:多源信息的融合使得模型在预测和优化交通流方面具有更高的准确性和可信度。
四、融合多源信息的元胞自动机交通流模型的应用前景融合多源信息的元胞自动机交通流模型在城市交通系统优化和管理中具有广阔的应用前景。
基于二维元胞自动机的温度场模型的分析
1 传 热密度 函数 及热 源的推 导 . 2
热源温度场迭加法的基础是瞬时点热源在无限大介质 中瞬时发 出一定热量后的任何时刻的温度场的 解。铣削过程中,铣刀片不规则面热源的求解 ,可以从点热源出发来求解。表面受热密度函数表达式H 为
向细致方向发展, 不断地提高 自身的复杂度和精细度的过程。 元胞 自动机忙( e u r u m t, C l l t a 简称 C ) l aA o a A 是
研究 自组织过程的有效工具 ,在揭示复杂系统的演化规律等方面有独到之处 。它的出现使得很多应用传统 的算法解决起来相当困难或根本无法解决的问题 ,得 以妥善 的解决 。
第 2 卷第 1 8 期 21 0 2年 1 月
齐 齐 哈 尔 大 学 学 报
J ura f qiar iest o nl o Qi h v ri Un y
V0.8 N . 1 .o I 2
J n,0 2 a. 1 2
基于二维元胞 自动机 的温度场模 型的分析
吕凯
( 吉林师范大学 计算机学院 ,吉林 四平 16 0 30 0)
1 车削温度试 验数据
11 试 验原 理 .
试验设备p 1 :采用机床型号为 C 64 A 10卧式车床 ;T e o io hr Vs n非接触式集成化在线式红外热像仪 ; m i
KS L R 5 7A电荷 et mV I E 一0 0 T n u I计算机。 i 工件材料 : Cl o/ ; 3 r l V 工件外形 : M 4 弦长为 8 m, O m 半径为 16 m 0 m 的扁圆柱。刀片牌号 :波形刃铣刀片:Y 55 T 3 ;刀片规格 :1r 6 m× 6 m方形可转位铣刀片。 a 1m
时刻为计算零点。 将采集的数据进行拟合得到温度与时间的变化方程。波形刃刀尖各时刻温度 M t b aa 方程为 l
基于元胞自动机的人员疏散模型设计与实验
i n a l l f i e l d s o f s o c i a l a n d n a t u r a l s c i e n c e s 。i n c u r r e n t e r a w i t h t h e t e c h n o l o g i e s o f i n t e me t f o t h i n g s a n d b r o a d b a n d c o mmu n i c a t i o n。t h e a p p l i c a t i o n b e c o me s mu c h w i d e r .B y u s i n g t h e p i r n c i p l e o f c e l l u l a r a u t o ma t a ,we e s t a b l i s h a ma t h e ma t i c a l mo d e l o f e v a c u a t i o n .T h e mo d e l
第3 O卷第 7期
2 0 1 3年 7月
计 算机 应用 与软 件
C o mp u t e r Ap p l i c a t i o n s a n d S o f t wa r e
Vo 1 . ቤተ መጻሕፍቲ ባይዱ 0 No . 7
J u 1 .2 0 1 3
基 于 元胞 自动机 的人 员 疏 散 模 型 设 计 与 实 验
任 小 娟
( 山东英才学院 山东 济南 2 5 0 0 1 4 )
摘
要
元胞 自动机作为一种动态模 型与通 用性建模 的方 法, 其应用几 乎涉及社 会和 自然科 学的各个领域 , 在 当前物联 网技术 、
宽带通信技术 时代得到 了更加广泛的应用。利 用元胞 自动机 原理建立人 员疏散 的数学模型 , 模 型采用 二维元胞 自动机技 术, 确定元 胞 空间和 元胞状 态, 根据实际情况建 立人 员移 动行为规则并讨论元胞 重复行进 次数和危险 物质 扩散对人 员行 为 的影响。实验结果
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
进行模拟。实际的网 络是异 构的, 存在着 瓶颈节点 , 拥 塞是其 固有属性, 因此对拥塞相态下网络特性的研究是非常重要的。
针对 现有研究的 不足, 本文提出 了基于 TCP / IP 协议的异 构二维元胞自动 机网络模型, 对拥塞相态下的网络特性作了研 究, 并分析了网络局部负载 特性和 全网负 载特性的 关系, 为大 规模网络的研究 提供了新的思路。
Ab stract: A mi ing to mi prove the sho rtcom ings such as random forw ard ing and lack ing ana ly sis of congestion in one dmi en siona l and tw o dmi ensiona l ce llular automa tion mode,l th is pape r propo sed a netw ork m ode l based on the tw o d mi ensiona l ce l lu lar automa ton. T he transition rule o f cells w as designed in acco rdance w ith TCP / IP congestion contro l pro toco,l and the ce l lu lar in the model was w ith different queue leng th in order to enhance the he terogeneity of the ne tw ork. T he smi ulation results revea l tha t the traffic load o f the node and the p rocessing delay of the node are w ith cha racte rs of wh ite noise and 1 /f no ise. T he d ifference o f the load character istics be tw een the loca l netwo rks and the entire netwo rks is also observ ed. It is shows tha t the m ode l based on the tw o d mi ensiona l cellu lar automa ton is sca lable and applicable for research on the behav ior o f large sca le netwo rks. K ey words: congestion; ce llu lar autom ation; load; de lay
应用中一般采用 正方形网 格的二 维模型。 其邻居通 常有 三种表达形式, 如图 2所示, 黑色元胞为中心元胞 , 灰色元胞为 其邻居, 它们的状态一起决定中心元胞在下一时刻的状态。
中已经证实封闭 式和开放式模型并没有什么明显的差异, 这是 因为不同的边界 此时影响的只 是路由计 算上的 距离 [7] 。为了 与 Jian等人的二维 模型 进行 比较, 本 文的 模型 选取 了周 期边 界的形式。
2 3 邻居
本文采用了 V on. N eum ann型二维元胞 自动机。每 个元胞 有上、下、左、右四个邻居, 如图 2( a)所示。元胞在元 胞空间中 的位置可采用笛 卡尔单位矢量表示为 r= ic x + jc y。其中: cx 和 c y 为笛卡尔矢量。因此, 中心元胞 的邻居 可以表 示为 { r - cx, r + c x, r - cy, r + c y }。 2 4 更新规 则
在二维元胞自动 机网络模型中, 邻居范围的不同决定了数 据包转发的 路径选 择。为了 方便 起见, 本文 选取 了 V on. N eu m ann型的元胞自动机作为网络原型。
2 基于二维元胞自动机的网络模型
根据第 1章的介绍可知, 元胞自动机是由最基本的四部分 组成, 即元胞、元胞空间、邻居及规则。下面就依照这四部分来 介绍本文提出的网络 模型。
0 引言
由于网络结构越 来越复杂, 研究者对真实的网络进行各种 建模, 以方便研究 其内 部的 一些 特性, 如 随机 图模 型 [ 1] 、小世 界模型 [ 2] 等都是比较典型的 网络模 型。网络建 模在网 络技术 的研究中有着重要的 意义, 是网络 性能研 究不可 缺少的工 具。 元胞自动机以其结构简 单、易于扩 展、非 常适合 计算机 仿真等 诸多优点获得了网络 建模研 究者的 青睐。一维 元胞自 动机理 论成熟, 模型简单, 目前在网络建模方面 应用比较广 [ 3~ 5], 但是 一维元胞自动机网络 模型将节点转发数据包过程随机化, 缺乏 拥塞控制过程, 与实际网络 偏差较 大, 而 且由于 维度限 制不利 于大规模网络特性 的研究。 Jian等 人 [ 6] 提出 了一 种基于 二维 元胞自动机的网络模型, 在 模型中 加入了 拥塞控制 协议, 但是 模型的每个元胞缓冲 区排队长度设置为无限长, 因此拥塞控制 协议并未起到拥塞控 制的作用, 只能对自由相态下的网络特性
网络协议规 定了网络中节 点自身工 作的方 式以及 节点之 间通信的方式, 因 而映 射到 元胞 自动 机中 对应 元胞 的更 新规 则。为了更好地模拟网 络, 在模型 中引入了 TCP /IP 拥 塞控制 协议, 主要包括慢启动、拥 塞回避、快速重传和快速恢复四个过 程。慢启动和拥塞回退 原则主 要是在网 络非拥 塞情况 下采取 的控制措施。因为模型 中设定 每个路由 器的缓 冲区是 有限的 ( B i ), 所以网络中可能 出现拥 塞现 象。 TCP / IP 的 拥塞控 制协 议认为拥塞的主 要依据为是否发生了数据包的重传。网络中, T CP 对每一个包都有一 个定时 器, 称 为重传 定时器 ( RTO ), 当 RTO 超 时且还 没有得到 数据确 认, 那么 TCP 就 会对该 报文段 进行重传。当发生超 时, 那 么出现 拥塞的 可能性就 很大, 某个 数据包可能在网 络中某处丢失, 并且后续的数据包也没有了消 息, 在这种情况下, TCP 就判 断发 生了 拥 塞, 并且 通 过快 速重 传、快速恢复 进行控制。图 4中描述了 TCP / IP 拥塞 控制协议 下数据窗的调 整过 程, cwnd表 示窗 口大 小, ssthresh 表示 慢启 动阈值。
对于最常见的二 维元胞自动机, 二维元胞空间通常可以按 照三角形、正方形或六边 形等网 格排列, 如图 1所示。这 三种 规则的元胞空间 划分 在模型 构建 时各 有优 缺点: a) 三角 网格 的优点是拥有相对较 少的相邻元胞数目, 并且易于处理复杂边 界; 其缺点是计算机的表达 与显示 不方便, 需要 转换为 四方形 网格; b)正方形网格的优点是直观 而简单, 而且 特别适 合于现 有计算机环境下进行 表达显示; 其缺点是不能较好地模拟各向 同性现象; c)六 边形网 格的 优点 是能 较好 地模 拟各 向同 性的 现象; 其缺点同三角模型一样, 在表达显示上较为困难。
1 元胞自动机
元胞自动机 是一种时空离散的局部动力学模型, 是对结构 复杂的系统研究 的一个典型方法, 特别适合用于空间复杂系统 的时空动态模拟 研究。 1 1 元胞自 动机的概念
元胞自动机 是由空间上各向同性的一系列元胞组成, 用于 模拟和分析几何 空间内的各 种现象。标 准的元 胞自动 机是一 个四元组: A = ( Ld, S, N, f )。其中: A 代表一个元胞 自动机系
N etw ork m odel based on tw o d im ensional cellular autom ation
L IU Jia1, ZHANG W en zhu2, JIN D e peng2, YUAN Jian2, ZENG L ie guang2, W ANG Y ao x i3 ( 1. C hina M obile G roup Pe sig n In sti tu te Co. L td, B eijing 100080, C hina; 2. D ept. of E lectronic E ng ineering, T singhua Un iversity, B eijing 100084, China; 3. Yunnan C ompu ter Center, Yunnan U niversity, K unm ing 650223, Ch ina )
2 1 元胞 模型采用单一节 点元胞, 每个元 胞代表 一个路 由器节 点。
每个路由器在不同时 刻缓存数据包的个数代表了元胞的状态, 如图 3所示。在 本模 型中, 假 设二 维元 胞自 动机 模型 规 模为 N = L ∀ L (N 为元胞自动机中总的节点数, L 为二维元胞自动机 格子图的长度 ), 第 i( i= 1, 2, !, N )个节 点的缓存区 存储量为 Bi, 则元胞的状态空间为 S = { 0, 1, 2, !, m axBi }。 2 2 元胞空间
收稿日期: 2009 05 12; 修回日期: 2009 06 15 基金项目: 国家 973 重点基础研究资助项目 ( 2007CB310701) 作者简介: 刘佳 ( 1981 ) , 女, 河北唐山人, 博士, 主要研究方向为 IP网 络的可测性、弹性 分组环网络关键 技术 ( yayajialiu@ gm ai.l com ) ; 张文铸 ( 1982 ) , 男, 黑龙江哈尔滨人, 博士, 主要研究方向为无线传感器网络和元胞自动机理论; 金德鹏 ( 1972 ) , 男, 湖北黄冈人, 副教授, 博士, 主要研究 方向为通信网络及相关芯片设计; 袁坚 ( 1964 ), 男, 陕西西安人, 副教授, 博士, 主要研究方向为信息与网络安全、网络移动性、动 力学复杂性; 曾烈 光 ( 1947 ) , 男, 四川南部人, 教授, 学士, 主要研究 方向为 通信网 络理论 与系 统及其 A S IC ( 专用集 成电路 ) 与 SOC ( 单芯片 上系统 ) 设计; 王耀希 ( 1954 ) , 云南个旧人, 研究员, 硕士, 主要研究方向为数字媒体技术.