自动控制理论(邹伯敏)第五章答案(1)
自控 邹伯敏第05章1
0 ≤ ξ ≤ 0.707
图5-16 Mr与ζ 的关系曲线
2010-12-27 第五章 频率响应 14
自动控制理论 5. 滞后因子
e −τjω
G ( jω ) = e −τjω = 1
ϕ (ω ) = −τω
图5-17 滞后因子的相频特性
2010-12-27 第五章 频率响应 15
自动控制理论
二、开环系统的伯德图
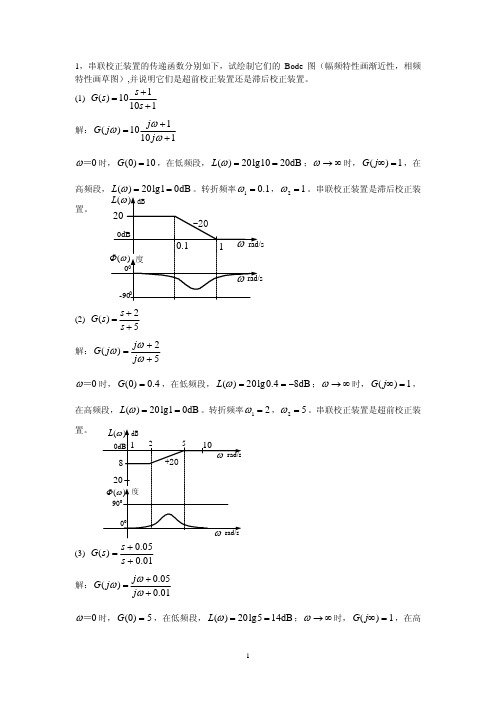
例5-2 G ( s ) H ( s ) =
10 (1 + 0.1s ) 绘制Bode图。 s (1 + 0.5 s )
解: (1)幅频特性
G ( jω ) =
10 (1 + j
ω
10 2
) )
16
jω (1 + j
ω
2010-12-27
第五章 频率响应
自动控制理论
L (ω ) = 20 lg 10 − 20 lg ω − 20 lg 1 − ( ) 2 + 20 lg 1 + ( ) 2 2 10
图5-9
2010-12-27
1 (1 + jωT ) −的对数幅频曲线、渐近线和相角曲线
第五章 频率响应
9
自动控制理论
由于(1 + jωT )与(1 + jωT ) −1 互为倒数,则有
20 lg 1 + jωT = −20 lg arg(1 + jωT ) = − arg( 1 1 + jω T
试绘制系统的幅频和相频特性曲线。 解:令
S , jq =
10( j 2 + 1) ( j 2 + 2 + j 3)( j 2 + 2 − j 3)
自控原理第五章习题参考答案

5-1 5()0.251G s s =+5()0.251G j j ωω=+()A ω=()arctan(0.25)ϕωω=-输入 ()5cos(430)5sin(460) =4r t t t ω=-︒=+︒(4)A ==(4)arctan(0.25*4)45ϕ=-=-︒系统的稳态输出为()(4)*5cos[430(4)]3045)17.68cos(475)17.68sin(415)c t A t t t t ϕ=-︒+=-︒-︒=-︒=+︒ sin cos(90)cos(90)cos(270)αααα=︒-=-︒=+︒或者,()(4)*5sin[460(4)]6045) 17.68sin(415)c t A t t t ϕ=+︒+=+︒-︒=+︒所以,对于cos 信号输入下的稳态输出计算规律与sin 信号作用下计算相同。
5-3(2)1()(1)(12)G s s s =++ 1()(1)(12)G j j j ωωω=++()A ω=()arctan arctan 2ϕωωω=--起点:0ω= (0)1;(0)0A ϕ==︒ 位于正实轴上。
终点:ω→∞ ()0;()180A ϕ∞=∞=-︒+∆ 从第三象限趋于原点因此,,Nyquist 曲线与虚轴有交点,并且满足:()arctan arctan 290ϕωωω=--=-︒ arctan arctan 290ωω+=︒所以有,1/(2)ωω= 21/2ω=()0.473A ω=== 因此,与虚轴的交点为(0,-j0.47)()ω(3)1()(1)(12)G s s s s =++ 1()(1)(12)G j j j j ωωωω=++()A ω=()90arctan arctan 2ϕωωω=-︒--起点:0ω= (0);(0)90A ϕ=∞=︒∆-- 位于负虚轴(左侧)无穷远方向终点:ω→∞ ()0;()270A ϕ∞=∞=-︒+∆ 从第二象限趋于原点因此,,Nyquist 曲线与实轴有交点,并且满足:()90arctan arctan 2180ϕωωω=-︒--=-︒ arctan arctan 290ωω+=︒1/(2)ωω= 21/2ω=2()0.673A ω===与实轴的交点为(-0.67,-j0))ω(4)21()(1)(12)G s s s s =++ 21()()(1)(12)G j j j j ωωωω=++()A ω=()180arctan arctan 2ϕωωω=-︒--起点:0ω= (0);(0)180A ϕ=∞=︒∆-- 位于负实轴(上侧)无穷远方向终点:ω→∞ ()0;()360A ϕ∞=∞=-︒+∆ 从第一象限趋于原点因此,,Nyquist 曲线与虚轴有交点,并且满足:()180arctan arctan 2270ϕωωω=-︒--=-︒ arctan arctan 290ωω+=︒1/(2)ωω= 21/2ω=()0.94A ω===与虚轴的交点为(0,j0.94))ω=5-4(2)10.5ω=,21ω=,1K =,0ν=(3)10.5ω=,21ω=,1K =,1ν=低频段直线(延长线)与0db 线交点的频率为:1/cK νω'=。
自控原理习题解答第五章
s 4s
3
2 2 2
0.5s 5s 0.5s 2s 3s 2 3s 12 - 10
s 2 1.4s 0.66 3 2 s 3.1 s 4.5s 5s 2 s 3.1s
3 2
1.4s 5s
2 2
1.4s 4.34s 0.66s 2 0.66s 2.05 - 0.05 分离点d 3.1
4求与虚轴的交点 2 ss 4 s 2s 2 k 0
s 6s 10s 8s k 0
4 4 3 2 3 2
s s s s s
1 6 6 10 - 1 8 52 6 6 52 8 - 36k 416 36k 52 52 k
10 8 6k - 0 6 0
1.1 0.38 s 0.45, s j0.67 0.93
2
5-5设控制系统的开环传递函数为
k G (s)H(s) s(s 2)(s 7)
(1)试绘制系统的根轨迹图。 (2)试确定系统稳定情况下k的取值范围; (3)试确定阻尼系数ζ =0.707情况下的k值。
1
i 1 i j1
m
n
j
2l 1 , l 0,1,2,
0 180 63.4 63.4 180 s1点满足幅角方程,它是 根轨迹上的点。
求k 由式5 14得 k
(s p )
பைடு நூலகம்j j1 m
n
(s z )
s 1.1s 1.3s 0.5s k 0
4 3 2
k s 1.1s 1.3s 0.5s
4 3 2
dk 3 2 4s 3.3s 2.6s 0.5 0 ds
浙江大学自动控制理论课第五章频率响应

2
10(S 1) j3)(S 2
j3)
试绘制系统的幅频和相频特性曲线。
解:令 S , jq
G( j2)
10( j2 1)
( j2 2 j3)( j2 2 j3)
10 563.4 。
2968.2 5 26.6
1.857 21.8
图5-5
2020/6/16
课件
6
自动控制理论 图5-6
(1
2 n2
)2
4
2
2 n2
2
(
)
ar
c
tan 1
n 2
n2
limG( j) 10 0
limG( j) 0 180 0
2020/6/16
课件
28Leabharlann 自动控制理论根据不同的ζ值,作出的乃氏图如图5-23所示。
图5-23
2020/6/16
课件
29
自动控制理论
2)G( j) 1 2 j2
➢ 开环增益K在数值上等于低频渐近线(或延长线)与0dB线 相交点频率值的平方。
2020/6/16
课件
24
自动控制理论
第三节 极坐标图
G( j) p() jQ() p2 () Q2 ()e j() 式中() arctan Q()
p()
当输入信号的频率ω由0→∞变化时,向量G(j ω) 的端点在复平面上移动的轨迹叫极坐标图或称为乃氏图。
1
1
结论: Cs按顺时针方向围绕F(S)的一个零点,则其在F(S)平面上的
映射曲线CF亦按顺时针方向围绕F(S)平面的坐标原点旋转一周. 如果Cs按顺时针方向围绕F(S)的z个零点,则其在F(S)平台上的映射
自动控制理论邹伯敏第3版课后答案总.doc

《自动控制理论 第2版》习题参考答案第二章2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-2 (a)()()RCs RCs s U s U 112+= (b) ()()141112+⋅-=Cs R R R s U s U (c) ()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602 2-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i2-8 (a)()()()()3113211G H G G G G s R s C +++= (b) ()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12 (a)()()()adgi abcdi agdef abcdef cdhs R s C +++-=11(b) ()()()1221211222112++++=s C R C R C R s C R C R R s R s C2-13 由选加原理,可得()()()()()()[]s D H G G s D G s D G s R G G G H G H s C 3121221221221111--+++=第三章3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时设系统为单位反馈系统,有()()()()()2222nn n r s s s s R s c s R s E ωζωζω+++=-= 系统对单位斜坡输入的稳态误差为 ()nn n n s sr s s s s s s im e ωζωζωζω22212220=+++⋅⋅=→ 3-2 (1) 0,0,50===a v p K K K (2) 0,,==∞=a v p K K K K(3) 10,,K K K K a v p =∞=∞= (4) 0,200,==∞=a v p K KK K 3-3 首先求系统的给定误差传递函数()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()0)101.0()12.0(20)101.0(2lim lim 1.0)101.0()12.0(10lim lim 0101.0)11.0(lim lim 322202202220012000=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s e s s e s(1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r s s s ,于是稳态误差级数为()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r s s s ,于是稳态误差级数为()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t rt R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s = ,于是稳态误差级数为 ())(1.0)(!2)()(21210t R R t r C t rC t r C t e s s s sr +=++= ,0≥t 3-4 首先求系统的给定误差传递函数()5001.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()⎪⎭⎫⎝⎛++-=-=-t e t t c s n t n nn n 21222,1ωωωωω()()()232220220222001200050098)5001.0()12.0(1000)5001.0(100lim lim 5001)5001.0()12.0(500lim lim 05001.0)11.0(lim lim =+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s es s e stt r t t rt t r s s s 5sin 25)(5cos 5)(5sin )(-===稳态误差级数为()[][][]tt tC t C C t e sr 5cos 1015sin 109.45cos 55sin 25224120 -⨯++⨯=-⨯+⎥⎦⎤⎢⎣⎡+⨯-=- 3-5 按技术条件(1)~(4)确定的二阶系统极点在s 平面上的区域如图A-3-1 (a) ~ (d)的阴影区域。
《自动控制原理》第5章习题答案
G0 ( s ) =
1 s (0.1s + 1)
特征方程为, D( s ) = 0.1s 2 + s + 1 = 0 ,即,s + 10 s + 10 = 0 ,
2
ω n = 10 = 3.162 , ζ =
10 = 1.58 ,原系统为过阻尼系统, 2ω n
2
σ % = 0 , ts >
4
ζω n
解: G ( jω ) =
ω=0 时, G (0) = 0.4 ,在低频段, L(ω ) = 20 lg 0.4 = −8dB ; ω → ∞ 时, G ( j∞) = 1 ,
在高频段, L(ω ) = 20 lg1 = 0dB 。转折频率 ω1 = 2 ,ω 2 = 5 。串联校正装置是超前校正装 置。
-j 3.46
②计算期望主导极点位置。 系统期望闭环主导极点具有阻尼系数 ζ =
2 ,自然振荡频率 ω n = 4 2 , 2
θ = arccosζ = arccos
2 = 450 , 则 一 个 具 有 期 望 极 点 的 2 阶 系 统 特 征 方 程 为 , 2
s 2 + 8s + 32 = 0
jω
期望极点
期望极点
− p3
j
600
j0.58
− p2
-1
− p1
0 -j
-3
-2
σ
-2
19.150 -1
40.880 0.33 0
119.640
校核相角条件: 根据在图中主导极点位置的近似值-0.33 ± j 0.58 和开环极点的位置, 作由各开环极点到期望主导极点的向量,
Φ = -119.640 -40.880 -19.150 = -179.670≈-1800
自动控制理论课后习题详细解答答案(夏德钤翁贻方版)第五章

第五章5-1 已知单位反馈系统的开环传递函数,试绘制其开环频率特性的极坐标图(1)解:幅频特性:相频特性:列表取点并计算。
0.5 1.0 1.5 2.0 5.010.01.790.7070.370.2240.0390.0095-116.6-135-146.3-153.4-168.7-174.2系统的极坐标图如下:(2)解:幅频特性:相频特性:列表取点并计算。
00.20.50.8 1.0 2.0 5.010.910.630.4140.3170.1720.01950-15.6-71.6-96.7-108.4-139.4-162.96系统的极坐标图如下:(3)解:幅频特性:相频特性:列表取点并计算。
0.20.30.51254.55 2.74 1.270.3170.0540.0039-105.6-137.6-161-198.4-229.4-253系统的极坐标图如下:(4)解:幅频特性:相频特性:列表取点并计算。
0.20.250.30.50.60.8122.7513.87.86 2.520.530.650.317-195.6-220.6-227.6-251.6-261.6-276.7-288.4系统的极坐标图如下:5-2 试绘制上题中各系统的开环对数频率特性(伯德图)。
(1)解:系统为Ⅰ型,伯德图起始斜率为-20dB/dec,在处与=20=0相交。
环节的交接频率,斜率下降20dB/dec,变为-40dB/de c。
系统的伯德图如图所示:(2)解:伯德图起始为0dB线,的交接频率,斜率下降20dB/dec,变为-20dB/de c。
的交接频率,斜率下降20dB/dec,变为-40dB/de c。
系统的伯德图如图所示。
(3)解:系统为Ⅰ型,伯德图起始斜率为-20dB/dec,其延长线在=1处与=20=0相交。
的交接频率,斜率下降20dB/dec,变为-40dB/de c。
的交接频率,斜率下降20dB/dec,变为-60dB/de c。
自动控制理论邹伯敏第3版课后答案总.doc
《自动控制理论 第2版》习题参考答案第二章2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-2 (a)()()RCs RCs s U s U 112+= (b) ()()141112+⋅-=Cs R R R s U s U (c) ()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602 2-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i2-8 (a)()()()()3113211G H G G G G s R s C +++= (b) ()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12 (a)()()()adgi abcdi agdef abcdef cdhs R s C +++-=11(b) ()()()1221211222112++++=s C R C R C R s C R C R R s R s C2-13 由选加原理,可得()()()()()()[]s D H G G s D G s D G s R G G G H G H s C 3121221221221111--+++=第三章3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时设系统为单位反馈系统,有()()()()()2222nn n r s s s s R s c s R s E ωζωζω+++=-= 系统对单位斜坡输入的稳态误差为 ()nn n n s sr s s s s s s im e ωζωζωζω22212220=+++⋅⋅=→ 3-2 (1) 0,0,50===a v p K K K (2) 0,,==∞=a v p K K K K(3) 10,,K K K K a v p =∞=∞= (4) 0,200,==∞=a v p K KK K 3-3 首先求系统的给定误差传递函数()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()0)101.0()12.0(20)101.0(2lim lim 1.0)101.0()12.0(10lim lim 0101.0)11.0(lim lim 322202202220012000=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s e s s e s(1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r s s s ,于是稳态误差级数为()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r s s s ,于是稳态误差级数为()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t rt R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s = ,于是稳态误差级数为 ())(1.0)(!2)()(21210t R R t r C t rC t r C t e s s s sr +=++= ,0≥t 3-4 首先求系统的给定误差传递函数()5001.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()⎪⎭⎫⎝⎛++-=-=-t e t t c s n t n nn n 21222,1ωωωωω()()()232220220222001200050098)5001.0()12.0(1000)5001.0(100lim lim 5001)5001.0()12.0(500lim lim 05001.0)11.0(lim lim =+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s es s e stt r t t rt t r s s s 5sin 25)(5cos 5)(5sin )(-===稳态误差级数为()[][][]tt tC t C C t e sr 5cos 1015sin 109.45cos 55sin 25224120 -⨯++⨯=-⨯+⎥⎦⎤⎢⎣⎡+⨯-=- 3-5 按技术条件(1)~(4)确定的二阶系统极点在s 平面上的区域如图A-3-1 (a) ~ (d)的阴影区域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制理论第五章答案
题5-2 (1) 解
存在一个积分环节,低频处斜率为20/dB dec -,在1ω=时,()20log 20L K dB ω== 在2ω≥处,惯性环节对加速衰减,斜率由20/dB dec -变为40/dB dec - 在10ω≥处,又加入一个惯性环节,斜率由40/dB dec -变为60/dB dec - 系统相频特性按下式计算
()90arctan(0.5)arctan(0.1)ϕωωω=---
ω
0 1 10 100 ∞
()ϕω
-90
-122
-214
-263
-270
()/L dB
ω20dB
40dB 60dB -20dB -40dB -60dB
()/L dB
ω-90°-180°-270°
(2)解(原有答案的相频特性曲线画错,现已更正)
2275(10.2)0.75(10.2)
()(16100)(0.010.161)s s G s s s s s s s ++=
=
++++
存在一个积分环节,低频处斜率为20/dB dec -,在1ω=时,()20log 2.5L K dB ω==- 在5ω≥处,增加一个微分环节,斜率由20/dB dec -变为0/dB dec
在10ω≥处,加入一个二阶因子,斜率由0/dB dec 变为40/dB dec -,其中=0.80.707ζ>,不会产生谐振。
系统相频特性按下式计算
2
16()90arctan(0.2)arctan(
)100ω
ϕωωω
=-+-- ω
0 1 10- 10+ 100 ∞
()ϕω
-90
-88
-117
63
6
()/L
dB
ω20dB
40dB 60dB -20dB -40dB -60dB
()/L dB
ω-90°
-180°
题5-5 (d )
在低频处斜率为20/dB dec -,存在一个积分环节K s ,20lg
0100100
K
K =⇒= 在=0.01ω,斜率变为40/dB dec -,说明加入一个惯性环节1
10.01
s +
在20ω=,斜率变为60/dB dec -,说明又加入一个惯性环节1
120
s +
所以,传递函数为100
()(1001)(0.051)(1)(1)0.0120
K G s s s s s ==
++++ (f )
在低频处斜率为20/dB dec -,存在一个积分环节
K s ,20lg
0100100
K
K =⇒= 在=45.3ω,斜率变为60/dB dec -,说明加入一个振荡环节22
100
()(21)45.345.3
G s s s
s ζ=
++
设
1100
()L ωω
=
为积分环节的幅频
特
性
,
则
11(45.3)(100)20lg(45.3)20lg(100) 6.88L L -=-+=,又有1(100)0
L =,所以1(45.3)6.88(45.3)6.884.8511.73
L L =⇒=
+=
45.3100
()|20lg 11.73
45.3
0.286
L ωωζ==-=⇒= 所以,传递函数为22100
()0.572(1)45.345.3
G s s s s =
++
题5-9
(2)
奈氏曲线为
首先画出ω由0--∞→的奈氏图,再由于系统为I 型系统,s 平面上原点附近半圆在GH 平
由图可以看出,N=0,又P=0,所以Z=0,系统稳定。
5-13 (1)
=180()18090arctan()arctan(0.1)600.52
c
c c c γϕωωωω+=---=⇒≈
又
|()()|1
5.87
G j H j K ωω==⇒=
(2)
()90arctan()arctan(0.1)180g g g g ϕωωωω=---=-=
5.87 |()()|
110
1
18.74
|()()|
g g
g
g g
G j H j
K
G j H j
ωω
ωω
==
⇒==。