常用坐标系及其间的转换
CAD中的坐标系和坐标转换教程

CAD中的坐标系和坐标转换教程在CAD软件中,坐标系是一个非常重要的概念。
它用来定位和测量对象在二维或三维空间中的位置。
理解坐标系的概念及其转换是使用CAD软件的关键技巧之一。
在这篇文章中,我们将深入探讨CAD中的坐标系和坐标转换教程。
1. 定义坐标系在CAD软件中,一般使用笛卡尔坐标系(Cartesian coordinate system)来描述一个点的位置。
笛卡尔坐标系由三个坐标轴组成:x轴、y轴和z轴。
在二维空间中,只使用x和y轴。
坐标轴的交叉点被称为原点,通常表示为(0,0,0)。
2. 绝对坐标和相对坐标CAD中有两种常用的坐标表示方法:绝对坐标和相对坐标。
- 绝对坐标:通过直接给出点在坐标系中的位置来定义。
例如,一个点的绝对坐标可以表示为(10, 20, 5),其中x坐标为10,y坐标为20,z坐标为5。
- 相对坐标:通过给出点到另一个点的距离和方向来定义。
例如,如果我们要将一个点从(10, 20, 5)移动到(15, 25, 7),我们可以使用相对坐标表示为(5, 5, 2),其中x轴方向移动了5个单位,y轴方向移动了5个单位,z轴方向移动了2个单位。
3. 坐标转换在CAD软件中,我们经常需要进行坐标转换,以便在不同坐标系之间切换或进行准确测量。
- 绝对坐标到相对坐标的转换:如果我们知道两个点的绝对坐标,我们可以计算它们之间的相对坐标。
例如,我们知道点A的绝对坐标为(10, 20, 5),点B的绝对坐标为(15, 25, 7),我们可以计算从点A到点B的相对坐标为(5, 5, 2)。
这对于移动或复制对象非常有用。
- 相对坐标到绝对坐标的转换:如果我们知道一个点的绝对坐标和另一个点的相对坐标,我们可以计算出第二个点的绝对坐标。
例如,我们知道点A的绝对坐标为(10, 20, 5),点B相对于点A的坐标为(5, 5, 2),我们可以计算出点B的绝对坐标为(15, 25, 7)。
4. 坐标的旋转和缩放除了坐标的转换,CAD软件还提供了旋转和缩放的功能。
常用坐标系及其间的转换
将式(1.4)中之φ0、 α0 分别用 B0、 A0 代替。即可得到。
3. 发射坐标系与箭体坐标系间的欧拉角及方向余弦阵 这两个坐标系的关系用以反映箭体相对于发射坐标系的姿态角。为使一般一状态下
这两坐标系转至相应轴平行,现采用下列转动顺序:先绕 oz 轴正向转动ϕ 角,然后绕
新的 y′ 轴正向转动ψ 角,最后绕新的 x1 轴正向转γ 角。两坐标系的欧拉角关系如图 1.4
用该坐标系与其它坐标系的关系反映出火箭的飞行速度矢量状态。
1.1.2 坐标系间转换
1. 地心惯性坐标系与地心坐标之间的方向余弦阵
由定义可知这两坐标系的 oE ZI , oE ZE 是重合的,而 oE X I 指向平春分点 oE X E 指
向所讨论的时刻格林威治天文台所在子午线一赤道的交点, oE X I 与 oE X E 的夹角要通
cosα0 cosλ0 + sinα0 sinφ0 sin λ0
cosα0 cosφ0 ⎤
sinφ0
⎥ ⎥
−sinα0 cosφ0 ⎦⎥
(1.4)
若将地球考虑为总地球椭球体,则发射点在椭球体上的位置可用经度 λ0 ,地理纬
度 B0 确定, ox 轴的方向则以射击方位角 A0 表示。这样两坐标系间的方向余弦阵只需
过天文年历年表查算得到,记该角为 ΩG ,显然,这两个坐标系之间仅存在一个欧拉角
ΩG ,因此不难写出两个坐标系的转换矩阵关系。
⎡XE⎤
⎡XI ⎤
⎢ ⎢
YE
⎥ ⎥
= EI
⎢ ⎢
YI
⎥ ⎥
(1.1)
⎢⎣ ZE ⎥⎦
⎢⎣ ZI ⎥⎦
其中
பைடு நூலகம்
⎡ cos ΩG sin ΩG 0⎤
第1讲坐标系种类及坐标转换

第1讲坐标系种类及坐标转换在数学和物理学中,坐标系是用于表示和定位点的一组数学规则。
它可以帮助我们在平面或空间中精确地描述和测量位置、方向和距离。
坐标系通常由坐标轴和原点组成,坐标轴是一条直线,它们与原点形成直角。
有多种类型的坐标系,每一种都有特定的用途和应用。
以下是常见的几种坐标系:1.直角坐标系:直角坐标系也称为笛卡尔坐标系,是最常见的坐标系。
它由两条垂直的坐标轴和一个原点组成。
坐标轴可以是水平的x轴和垂直的y轴,或者在三维空间中可以加上一个垂直的z轴。
直角坐标系使用(x,y,z)来表示点的坐标,其中x表示点在x轴上的位置,y表示点在y轴上的位置,z表示点在z轴上的位置。
2.极坐标系:极坐标系用于描述平面上的点,它由一个原点和一个角度和距离组成。
极坐标系以原点为中心,用一个角度(通常用弧度表示)表示点与参考线(通常是x轴)之间的角度,用一个距离表示点与原点之间的距离。
极坐标系使用(r,θ)来表示点的坐标,其中r表示点与原点的距离,θ表示点与参考线之间的角度。
3.柱坐标系:柱坐标系是三维空间中的一种坐标系,它由一个原点、一个角度、一个距离和一个高度组成。
柱坐标系类似于极坐标系,但增加了一个垂直的z轴来表示高度。
柱坐标系使用(r,θ,z)来表示点的坐标,其中r表示点与原点的水平距离,θ表示点与参考线(通常是x轴)之间的角度,z表示点的高度。
4.球坐标系:球坐标系也是三维空间中的一种坐标系,它由一个原点、一个纬度、一个经度和一个距离组成。
球坐标系使用(r,θ,φ)来表示点的坐标,其中r表示点与原点的距离,θ表示点与参考线(通常是z轴)之间的纬度,φ表示点在参考平面上的经度。
在不同的坐标系之间进行转换时,我们需要使用特定的转换公式。
以直角坐标系和极坐标系为例,我们可以使用以下公式进行转换:x = r * cos(θ)y = r * sin(θ)r = sqrt(x^2 + y^2)θ = atan2(y, x)这些公式使我们能够在不同坐标系之间相互转换,并确保保持位置的准确性。
常用坐标系之间的关系与转换
7.5 常用坐标系之间的关系与转换一、大地坐标系和空间大地直角坐标系及其关系大地坐标系用大地纬度企丈地经度L 和丈地髙H 来表示点的位置°这种坐标系是经 典大地测量甬:両用座标紊7屜据地图投影的理论,大地坐标系可以通过一定的投影转 化为投影平面上的直角坐标系,为地形测图和工程测量提供控制基础。
同时,这种坐标系 还是研究地球形状和大小的 种有用坐标系°所以大地坐标系在大地测量中始终有着重要 的作用.空间大地直角坐标系是-种以地球质心为原点购亘墮®坐标系,一般用X 、化Z 表 示点BSSTSTT 逐碇SS 範菇飞両H 绕禎扭转冻其轨道平面随时通过 地球质心。
对它们的跟踪观测也以地球质心为坐标原点,所以空间大地直角坐标系是卫星 大地测量中一种常用的基本坐标系。
现今,利用卫星大地测量的手段*可以迅速地测定点的空间大地直角坐拯,广泛应用于导航定位等空间技术。
同时经过数学变换,还可求岀点 的大地坐标I 用以加强和扩展地面大地网,进行岛屿和洲际联测,使传统的大地测量方法 发生了深刻的变化,所以空间大地宜角坐标系对现今大地测量的发展’具有重要的意义。
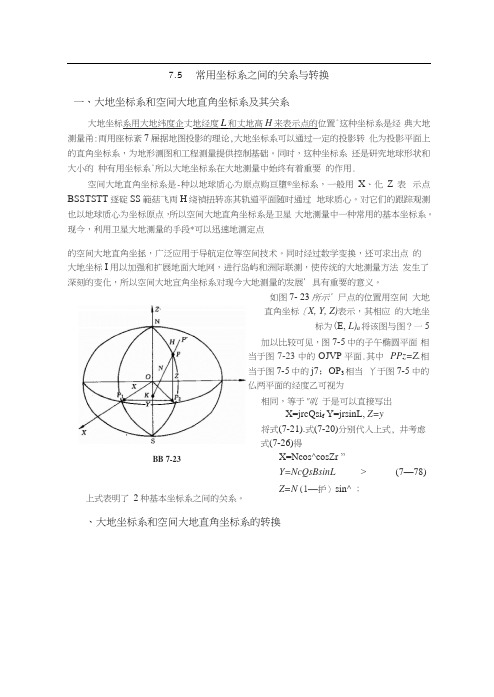
、大地坐标系和空间大地直角坐标系的转换如图7- 23所示’尸点的位置用空间 大地直角坐标〔X, Y, Z)表示,其相应 的大地坐标为(E, L)a 将该图与图?一5上式表明了 2种基本坐标系之间的关系。
加以比较可见,图7-5中的子午椭圆平面 相当于图7-23中的OJVP 平面.其中 PPz=Z.相当于图7-5中的j7;OP 3相当 丫于图7-5中的仏两平面的经度乙可视为相同,等于"叽 于是可以直接写岀X=jrcQsi f Y=jrsinL, Z=y将式(7-21).式(7-20)分别代入上式, 井考虑式(7-26)得X=Ncos^cosZr ”Y =NcQsBsinL > (7—78)Z=N (1—护〉sin^ ;BB 7-231.由大地坐标求空间大地直角坐标当已知椭球面上任一点P 的大地坐标(B, L)时,可以按式(7-78)直接求该点的 空间大地直角坐标(X, Y, Z)。
测量学中的坐标系和他们之间相互转换
二、研究对象二地球表面地物的形状和空间位置,空间位置要用坐标表示,所以研究坐标系及其相互之间的转换非常重要。
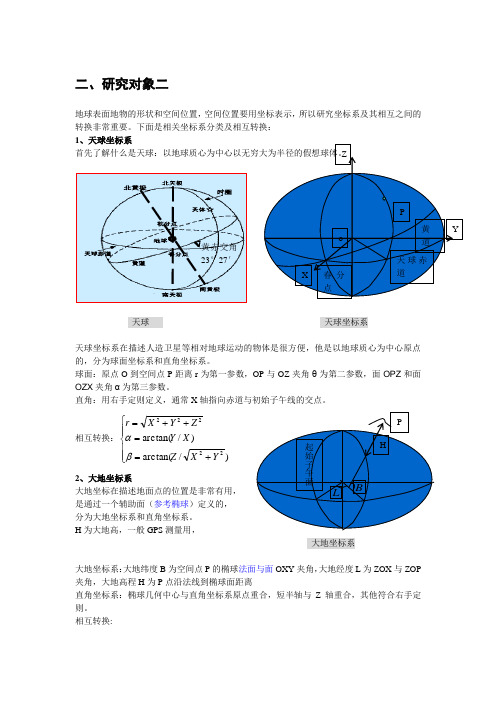
下面是相关坐标系分类及相互转换: 1、天球坐标系首先了解什么是天球:以地球质心为中心以无穷大为半径的假想球体。
天球 天球坐标系天球坐标系在描述人造卫星等相对地球运动的物体是很方便,他是以地球质心为中心原点的,分为球面坐标系和直角坐标系。
球面:原点O 到空间点P 距离r 为第一参数,OP 与OZ 夹角θ为第二参数,面OPZ 和面OZX 夹角α为第三参数。
直角:用右手定则定义,通常X 轴指向赤道与初始子午线的交点。
相互转换:⎪⎪⎩⎪⎪⎨⎧+==++=)/arctan()/arctan(22222Y X Z X Y Z Y X r βα 2、大地坐标系大地坐标在描述地面点的位置是非常有用, 是通过一个辅助面(参考椭球)定义的, 分为大地坐标系和直角坐标系。
H 为大地高,一般GPS 测量用,大地坐标系大地坐标系:大地纬度B 为空间点P 的椭球法面与面OXY 夹角,大地经度L 为ZOX 与ZOP 夹角,大地高程H 为P 点沿法线到椭球面距离直角坐标系:椭球几何中心与直角坐标系原点重合,短半轴与Z 轴重合,其他符合右手定则。
相互转换:黄赤交角23°27′X YZ oP春分点黄道 天球赤道 起始子午面L B PH[]⎪⎩⎪⎨⎧+=+=-=+-=L B H N X L B H N Y B e a N B H e N Z cos cos )(sin cos )(e ,2sin 21/ sin )21(为第一扁率卯酉全曲率半径,其中3、惯性坐标系(CIS )与协议天球坐标系① 惯性坐标系(CIS ):在空间不动或做匀速直线运动的坐标系.② 协议天球坐标系:以某一约定时刻t0作为参考历元,把该时刻对应的瞬时自转轴经岁差和章动改正后作为Z 轴,以对应的春分点为X 轴的指向点,以XOZ 的垂直方向为Y 轴方向建立的天球坐标系。
几种参考坐标系及其转换

地理坐标系转动
¾ 载体的运动将引起地理坐标 系相对地球坐标系转动。如 果考察地理坐标系相对惯性 坐标系的转动角速度,应当 考虑两种因素:一是地理坐 标系随载体运动时相对地球 坐标系的转动角速度;二是 地球坐标系相对惯性参照系 的转动角速度。
惯性坐标系/地球坐标系/地理坐 标系
载体坐标系
构成右手直角坐标系。
㈡ 惯性导航基础知识
¾惯性空间与惯性参照系 ¾惯性导航中常用的坐标系统 ¾直角坐标系间的角度关系与方向余
空间坐标系之间的角度关系可用一矩阵来表示,即方 向余弦矩阵。
方向余弦矩阵
欧拉角定义
根据欧拉角求取方向佘弦 矩阵
惯性坐标系
¾ 惯性坐标系是描述惯性空间的一种坐标系,在惯性坐标系中, 牛顿定律所描述的力与运动之间的关系是完全成立的。要建立 惯性坐标系,必须找到相对惯性空间静止或匀速运动的参照 物,也就是说该参照物不受力的作用或所受合力为零。然而根 据万有引力原理可知,这样的物体是不存在的。通常我们只能建 立近似的惯性坐标系,近似的程度根据问题的需要而定。惯性 导航系统中我们常用的惯性坐标系是太阳中心惯性坐标系,若 载体仅在地球附近运动,如舰船惯性导航系统,也可用地球中心惯 性坐标系,此时要同时忽略太阳的引力和地球中心的平移加速 度。
地球坐标系坐标系
地球坐标系 oxe ye ze 如图所 示。其原点取在地心;ze 轴沿极 轴(地轴)方向, xe 轴在赤道平 面与本初子午面的交线上,ye 轴 也在赤道平面内并与 xe 、ze 轴构
成右手直角坐标系。
在导航定位中,运载体相对地球 的位置通常不用它在地球坐标系中的
直角坐标来表示,而是用经度 λ 、纬 度ϕ 和高度(或深度) h 来表示,即
经纬度坐标系。
航天器飞行力学1
(1.13)
转换矩阵( OAξAηAζ A (Oξηζ )0 > (Oξηζ )t
7. 速度坐标系
O1xv yv zv
原点为火箭的质心。
O1xv 轴沿飞行器的飞行速度方向。 O1 yv 轴在火箭的主对称面内,重直 O1xv 轴。 O1zv 轴垂直于 O1xv yv 平面,顺着飞行方向看出,该
轴指向右方,为右手直角坐标系。 用该坐标系与其它坐标系的关系反映出火箭的飞行速 度矢量状态。
等式左端的方向余弦阵中有三个欧拉角:
θ、 σ、 ν
等式右端的方向余弦阵中包含五个欧拉角: ϕ、 ψ、 γ、 α、 β 由于方向余弦阵中的八个元素只有五个是独立的,因此由式(1.24)只能找 到三个独立的关系。
cosθ cosσ sinθ cosσ − sinσ ⎤ ⎡ ⎢cosθ sinσ sinν − sinθ cosν sinθ sinσ sinν + cosθ cosν cosσ sinν ⎥ ⎢ ⎥ ⎢ ⎣cosθ sinσ cosν + sinθ sinν sinθ sinσ cosν − cosθ sinν cosσ cosν ⎥ ⎦ ⎡ cos β cosα − cos β sinα sin β ⎤ ⎥i sin α cos α 0 =⎢ ⎢ ⎥ ⎢ ⎣− sin β cosα sin β sinα cos β ⎥ ⎦ cosϕ cosψ sinϕ cosψ − sinψ ⎤ ⎡ ⎢cosϕ sinψ sin γ − sinϕ cos γ sinϕ sinψ sin γ + cosϕ cos γ cosψ sin γ ⎥ ⎢ ⎥ ⎢ ⎣cosϕ sinψ cos γ + sinϕ sin γ sinϕ sinψ cos γ − cosϕ sin γ cosψ cos γ ⎥ ⎦
常用坐标系及其转换

BIH定义的
Z轴—指向 BIH 1984.0 零子午圈
定义的协议地球 (1984.0)
P
N
CTP
赤道
平面
(CTP)方向。
X轴—指向BIH 1984.0
O
的零子午面和CTP 赤道的交点。 Y轴—与Z、X轴构成右
Hale Waihona Puke 手坐标系。EYWGS8
4
XWGS84
PS
WGS-84世界大地坐标系
对应于 WGS-8大地坐标系有一个WGS-84椭球, 其常数采用 IAG和IUGG第 17届大会大地测量常数 的推荐值。
x
x
y Ry (xp )Rx ( y p ) y
z
CTS
z
t
协议地球坐标系和协议天球坐标系之间的转换
X
x
Y Ry (xp )Rx ( yp )Rz (G )N y
Z
CTS
z
第十章 坐标系统
§2.1 天球坐标系和地球坐标系 §2.2 WGS-84坐标系和我国的大地坐标系 §2.3 坐标系统之间的转换 §2.4 时间系统
为什么提出坐标系? 描述物体运动,必须有参照物,为描述物
体运动而选择的所有参照物叫参照系(参考 系)。参照系是粗略的,不精确的,必须建 立坐标系。准确和完善的描述物体的运动, 观测的结果模拟及 表示或解释需要建立一个 坐标系统。
为什么选用空间直角坐标系? 任一点的空 间位置可由该点在三个坐标
面的投影(X,Y,Z)唯一地确定,通过坐 标平移、旋转和尺度转换,可以将一个点的 位置方便的从一个坐标系转换至另一个坐标 系。与某一空间直角坐标系所相应的大地坐 标系(B,L,H),只是坐标表现形式不 同,实质上是完全等价的,两者之间可相互 转化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
− sinσ ⎤
cosσ
sinν
⎥ ⎥
cosσ cosν ⎥⎦
(1.8)
5. 速度坐标系与箭体坐标系间的欧拉角及方向余弦阵
据定义,速度坐标系 o1 yv 轴在火箭主对称平面 x1o1 y1 内。因此,这两个坐标系间的
转换关系只存在两个欧拉角。将速度坐标系先绕 o1 yv 转 β 角,β 角称为侧滑角;然后,
所示,该图是将它们原点重合在一起的。这样不难写出两个坐标系的方向余弦关系。
⎡ ⎢ ⎢
x10 y10
⎤ ⎥ ⎥
=
BG
⎡ ⎢ ⎢
x0 y0
⎤ ⎥ ⎥
⎢⎣ z10 ⎥⎦
⎢⎣ z0 ⎥⎦
(1.5)
其中
⎡
cosϕ cosψ
BG = ⎢⎢cosϕ sinψ sin γ − sinϕ cos γ
⎢⎣cosϕ sinψ cosγ + sinϕ sin γ
(1.9) (1.10)
侧滑角 β 是速度轴 xv 与箭体主对称面的夹角,顺 o1x1 看去, o1x1 在主对称面右方
为正;
攻角α 是速度轴 o1xv 在主对称面的投影与 o1x1 的夹角,顺 o1x1 轴看去,速度轴的投
影量在 o1x1 的下方为正。
6. 平移坐标系或发射惯性坐标系与发射坐标系的方向余弦阵 设地球为一圆球。据定义,发射惯性坐标系在发射瞬时与发射坐标系是重合的,只 是由于地球旋转,使固定在地球上的发射坐标系在惯性空间的方位发生变化。记从发射
9
将式(1.4)中之φ0、 α0 分别用 B0、 A0 代替。即可得到。
3. 发射坐标系与箭体坐标系间的欧拉角及方向余弦阵 这两个坐标系的关系用以反映箭体相对于发射坐标系的姿态角。为使一般一状态下
这两坐标系转至相应轴平行,现采用下列转动顺序:先绕 oz 轴正向转动ϕ 角,然后绕
新的 y′ 轴正向转动ψ 角,最后绕新的 x1 轴正向转γ 角。两坐标系的欧拉角关系如图 1.4
利用该坐标来建立火箭在惯性空间的运动方程。
5. 平移坐标系 oT − xT yT zT
该坐标系原点根据需要可选择在发射坐标系原点 o ,或是火箭的质心 o1 , oT 始终
与 o 或 o1 重合,但其坐标轴与发射惯性坐标系各轴始终保持平行。
该坐标系用来进行惯性器件的对准和调平。
6. 箭体坐标系 o1 − x1 y1z1 (弹体坐标系)
合,绕 oz 轴正向转动θ 角(速度倾角),接着绕 y′ 轴正向转动σ 角(航迹偏角),最后 绕 xv 轴正向转动ν 角(倾侧角),即可使地面坐标系与速度坐标系相重合,上述 θ、 σ、 ν 角即为三个欧拉角,图 1.5 中表示的各欧拉角均定义为正值。不难写出这两
个坐标系的方向余弦阵关系。
图 1.5 发射坐标与速度坐标欧拉角关系图 11
角ψ 称为偏航角,为轴 ox1 与射击平面的夹角, ox1 在射击平面的左方,ψ 角取正
值;
角 γ 称为滚动角,为火箭绕 x1 轴旋转的角度,当旋转角速度矢量与 x1 轴方向一致, 则该角 γ 取为正值。
4. 发射坐标系与速度坐标系间的欧拉角及方向余弦阵 两个坐标系的转动至平行的顺序及欧拉角如图 1.5 所示,图中将两个坐标系原点重
用该坐标系与其它坐标系的关系反映出火箭的飞行速度矢量状态。
1.1.2 坐标系间转换
1. 地心惯性坐标系与地心坐标之间的方向余弦阵
由定义可知这两坐标系的 oE ZI , oE ZE 是重合的,而 oE X I 指向平春分点 oE X E 指
向所讨论的时刻格林威治天文台所在子午线一赤道的交点, oE X I 与 oE X E 的夹角要通
2. 地心坐标系 OE − X EYE ZE 坐标系原点在地心 OE ,OE X E 在赤道平面内指向某时刻 t0 的起始子午线(通常取 格林威治天文台所在子午线), OE ZE 轴垂直于赤道平面指向北极。 OE − X EYE ZE 组成 右手直角坐标系。由于坐标 OE X E 与所指向的子午线随地球一起转动,因此这个坐标系
瞬时到所讨论时刻的时间间隔为 t ,则发射坐标系绕地轴转动ωet 角。
显然,如果发射坐标系与发射惯性坐标系各有一轴与地球转动相平行,那它们之间 方向余弦阵将是很简单的。一般情况下,这两个坐标系对转动轴而言是处于任意的位置。 因此,首先考虑将这两个坐标系经过一定的转动使得相应的新坐标系各有一轴与转动轴 平行,而且要求所转动的欧拉角是已知参数。一般情况下两个坐标的关系如图 1.7 所示。
时间变化而具有进动性,根据 1796 年国际天文协会决议,1984 年起采用新的标准历元,
以 2000 年 1 月 1.5 日的平春分点为基准。 OE ZI 轴垂直一赤道平面,与地球自转重合, 指向北极。 OEYI 轴的方向是使得该坐标系成为右手臂直角坐标系的方ቤተ መጻሕፍቲ ባይዱ。
该坐标系可有来描述洲际弹道导弹、运载火箭的飞行弹道以及地球卫星、飞船等的 轨道。
5
为一动参考系。 地心坐标系对确定火箭相地于地球表面的位置很适用。
3. 发射坐标系 O − xyz 坐标原点与发射点 o 固连, ox 轴在发射点水平面内,指向发射瞄准方向, oy 轴垂 直于发射点水平面指向上方。oz 轴与 xoy 面相垂直并构成右手坐标系。由于发射点 o 随
地球一起旋转,所以发射坐标系一动坐标系。 以上是该坐标系的一般定义。当把地球分别看成是圆球或椭球时,其坐标系的具体
(记作α0 )和射击方位角(记作 A0 ),这些角度均以对着 y 看去顺时针为正。
利用该坐标可建立火箭相对于地面的运动方程,便于描述火箭相对大气运动所受到 的作用力。
4. 发射惯性坐标系 oA − xA yA zA
火箭起飞瞬间, oA 与发射点 o 重合,各坐标轴与发射坐标系各轴也相应重合。火
箭起飞后, oA 点及坐标系各轴方向在惯性空间保持不动。
其中 VG 为方向余弦阵
⎡ ⎢ ⎢
xv0 yv0
⎤ ⎥ ⎥
=
VG
⎡ ⎢ ⎢
x0 y0
⎤ ⎥ ⎥
⎢⎣ zv0 ⎥⎦
⎢⎣ z0 ⎥⎦
(1.7)
⎡
cosθ cosσ
VG = ⎢⎢cosθ sinσ sinν − sinθ cosν
⎢⎣cosθ sinσ cosν + sinθ sinν
sinθ cosσ sinθ sinσ sinν + cosθ cosν sinθ sinσ cosν − cosθ sinν
cosα0 cosλ0 + sinα0 sinφ0 sin λ0
cosα0 cosφ0 ⎤
sinφ0
⎥ ⎥
−sinα0 cosφ0 ⎦⎥
(1.4)
若将地球考虑为总地球椭球体,则发射点在椭球体上的位置可用经度 λ0 ,地理纬
度 B0 确定, ox 轴的方向则以射击方位角 A0 表示。这样两坐标系间的方向余弦阵只需
sinϕ cosψ sinϕ sinψ sin γ + cosϕ cosγ sinϕ sinψ cosγ − cosϕ sin γ
由图 1.4 可看出各欧拉角的物理意义。
−sinψ ⎤
cosψ
sin
γ
⎥ ⎥
cosψ cosγ ⎥⎦
(1.6)
图 1.4 发射坐标系与箭体坐标系欧拉角关系图 10
角ϕ 称为俯为俯仰角,为火箭纵轴 ox1 在射击平面 xoy 上的投影量与 x 轴的夹角, 投影量在 x 的上方为正角;
图 1.1 发射坐标系之一
图 1.2 发射坐标系之二 7
7. 速度坐标系 o1 − xv yv zv 坐标系原点为火箭的质心。o1xv 轴沿飞行器的飞行速度方向。o1 yv 轴在火箭的主对 称面内,重直 o1xv 轴, o1zv 轴垂直于 xvo1 yv 平面,顺着飞行方向看出, zv 轴指向右方, o1 − xv yv zv 亦为右手直角坐标系。
绕新的侧轴 o1z1 转动 α 角,α 角称为攻角。即达到两个坐标系重合。两个坐标系的欧
拉角关系如图 1.6 所示。图中之α、 β 均为正值方向。因此,可得两个坐标系的方向余
图 1.6 速度坐标系与箭体坐标系关系图 12
弦关系为
⎡ ⎢ ⎢
x10 y10
⎤ ⎥ ⎥
=
BV
⎡ ⎢ ⎢
xv0 yv0
⎤ ⎥ ⎥
8
图 1.3 OE − X EYE ZE 与 0 − xyz 关系图
然后绕新坐标系 OE X ′ 正向转φ0 ,即可将 OEY 轴转至与 oy 轴平行,此时再绕与 oy 平
行的新的第二轴反转 90o + α0 ,即使得两坐标系相应各轴平行。而 −(90o − λ0 ) 、φ0 、
−(90o + α0 ) 即为三个欧拉角。方向余弦阵关系式为:
⎡ ⎢ ⎢
x0 y0
⎤ ⎥ ⎥
=
GE
⎡ ⎢ ⎢
xE0 yE0
⎤ ⎥ ⎥
⎢⎣ z0 ⎥⎦
⎢⎣ zE0 ⎥⎦
其中
(1.3)
⎡−sinα0 sin λ0 − cosα0 sinφ0 cosλ0
GE
=
⎢ ⎢
cosφ0 cosλ0
⎣⎢−cosα0 sin λ0 + sinα0 sinφ0 cosλ0
sinα0 cosλ0 − cosα0 sinφ0 sin λ0 cosφ0 sin λ0
o − ξηζ ,此时ξA 轴与ξ 轴均平行于地球转动轴。最后,将新的坐标系与各自原有坐
13
图 1.7 发射惯性坐标系与发射坐标系关系图
标系固连起来,这样, oA − ξAηAζ A 仍然为惯性坐标系, o − xyz 也仍然为随地球一起
转动的相对坐标系。 不难根据上述坐标系转动关系写出下列转换关系式
第一章 常用坐标系与变质量力学原理