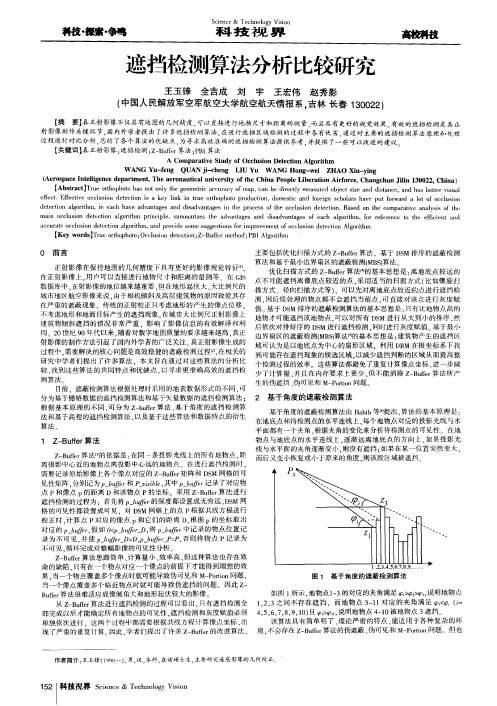
真正射影像生成中遮蔽区域的补偿
基于无人机实景三维模型的真数字正射影像生成方法
基于无人机实景三维模型的真数字正射影像生成方法成李博;段平;李佳;姚永祥;李晨;王云川【摘要】传统数字正射影像图(DOM)采用微分纠正方法消除相机倾斜与地形起伏所带来的投影误差,但会产生双重投影现象.真数字正射影像(TDOM)可有效解决DOM的双重投影问题.文中提出一种基于无人机影像的实景三维模型TDOM制作方法,首先通过无人机挂载五镜头相机获取航空摄影测量影像并生成实景三维模型;然后采集实景三维模型建筑物顶部轮廓边界线,并构建其三维体模型;最后基于建筑物顶部轮廓边界线三维体模型进行遮蔽检测和遮蔽补偿生成TDOM.以云南师范大学呈贡校区无人机影像实验数据验证了本文方法,实验表明本文的方法可作为一种生成高质量的TDOM方法.【期刊名称】《全球定位系统》【年(卷),期】2019(044)004【总页数】8页(P25-32)【关键词】无人机影像;真数字正射影像;实景三维模型;遮蔽检测;遮蔽补偿【作者】成李博;段平;李佳;姚永祥;李晨;王云川【作者单位】云南师范大学旅游与地理科学学院,云南昆明650500;云南省高校资源与环境遥感重点实验室,云南昆明650500;云南省地理空间信息工程技术研究中心,云南昆明650500;云南师范大学旅游与地理科学学院,云南昆明650500;云南省高校资源与环境遥感重点实验室,云南昆明650500;云南省地理空间信息工程技术研究中心,云南昆明650500;云南师范大学旅游与地理科学学院,云南昆明650500;云南省高校资源与环境遥感重点实验室,云南昆明650500;云南省地理空间信息工程技术研究中心,云南昆明650500;云南师范大学旅游与地理科学学院,云南昆明650500;云南省高校资源与环境遥感重点实验室,云南昆明650500;云南省地理空间信息工程技术研究中心,云南昆明650500;云南师范大学旅游与地理科学学院,云南昆明650500;云南省高校资源与环境遥感重点实验室,云南昆明650500;云南省地理空间信息工程技术研究中心,云南昆明650500;云南师范大学旅游与地理科学学院,云南昆明650500;云南省高校资源与环境遥感重点实验室,云南昆明650500;云南省地理空间信息工程技术研究中心,云南昆明650500【正文语种】中文【中图分类】P231.20 引言航空相机采用中心投影的方式获取地面航空影像. 因中心投影成像原理,导致航空影像中心点像素周围建筑物呈现倾斜样式,建筑物间因倾斜造成遮蔽. 真数字正射影像(TDOM)旨在消除因物体倾斜而导致的遮蔽现象,使得影像上物体以均匀的比例分布于真实位置. 传统数字正射影像(DOM)虽进行正射微分校正,但并不能使物体正确地分布在原本的位置. 同时,TDOM比DOM具有较高的可信度、精度高、信息量丰富、直观真实等特点,并且具有很高的背景控制信息的应用价值,成为地理信息库的重要基础数据,也是测绘、遥感行业的重要数据来源.生成TDOM的基础数据源有两种:数字建筑模型(DBM)和数字表面模型(DSM). DBM是由高程信息表示的建筑物轮廓,并根据所表示的建筑物层次结构的不同,区分不同图层的三维矢量模型,一般采用3Dmax、Sketchup等专业软件绘制,实际上不是实景三维模型. 自Z-buffer算法被提出以来[1],学者们基于DBM进行遮蔽检测生成TDOM. 在该算法中,Z缓冲器为每个像素存储投影中心与DBM之间的距离(Z)和DBM表面多边形投影到虚拟图像上的识别码. 传统的Z-buffer算法导致建筑物遮蔽的误检测,许多研究者对该方法进行了优化. Jiann等[2]提出一种使用多视图图像生成TDOM的方法;ZHOG等[3]提出一种基于多边形算法检测遮挡区域的方法,边馥苓等[4]提出一种基于有效像素的样本纹理合成方法,随后国内外学者也做了相关研究. 以上方法生成TDOM的前提需要DBM. 难点不在于检测,而在于DBM的生成. 面对区域较小,建筑物稀少、结构简单或数据库中已存有DBM模型的情况下,可实现较为快速的生成;反之,该类型方法很难快速生成TDOM.为此,大量学者研究了基于DSM进行建筑物的遮蔽检测生成TDOM[5-7]. Wan等[8]提出一种基于3D R-tree的CSG模型校正方法,以提高TDOM的质量;Habib 等[9]提出基于角度的射线追踪方法,任东风等[10]提出一种基于高程约束的TDOM 遮蔽检测的算法,肖卫峰等[11]提出一种基于DSM的光线追踪算法,潘慧波等[12]也利用DSM生成TDOM. 以上检测的假设是能够获取精确的DSM. 然而,在使用图像密集匹配获得精确的DSM是很困难的,导致建筑物边缘锯齿化[13],最终生成的TDOM效果损失.以上是基于DBM和DSM进行建筑物的遮蔽检测研究,但这两类方法各自都具有不同的缺陷. 无人机倾斜摄影测量技术采用无人机搭载多镜头传感器,能轻松获取同一地点同一时刻同一物体的多面信息,便于实景三维模型的构建[14]. 本文以无人机搭载五镜头相机获取低空航空影像,利用倾斜摄影技术生成实景三维模型,在此基础上,采集建筑物顶部轮廓线并构建三维体模型,并利用三维体模型进行遮蔽检测和遮蔽补偿,生成TDOM.1 无人机数据采集与实景三维模型以云南师范大学呈贡校区为实验区域,将无人机搭载五镜头相机获取的影像作为数据源生产1∶1000比例尺TDOM. 试验区域地处中国云贵高原,平均海拔1 900 m,坐标位于24°51′59″N、102°50′58″E,总面积达1.43 km2,校园建筑物较多,空间分明,通过分析气候变化、光线强度、行人适宜量等要素,于2018年8月23日采集实验区域航空影像.1.1 实验设备实验采用哈瓦四轴八旋翼MEGA-V8Ⅱ无人机,搭载SONY ILCE-5100五镜头数码相机采集航空影像,如图1所示,表1所示为倾斜相机五镜头参数.(a)多旋翼无人机(b)镜头SONY ILCE-5100图1 无人机设备表1 相机参数项目类型参数信息相机型号SONY ILCE-5100 传感器类型CCD 像幅大小6000×4000 像元大小3.8 μm 主点(x,y)(2986.0,1927.4) 焦距20 mm 镜头类型1个垂直,4个倾斜镜头倾斜角度45°在实验测区航飞数据时,设置飞行参数为:航向重叠度为85%,旁向重叠度为75%,相对航高150 m,飞行航向以东南-西北为基准,偏角为北偏西16.09°,镜头影像分辨率达2.9 cm;以9:00—14:00点为影像最佳采集点,续航飞行5个架次,飞行航线46条,共获取13 025幅低空数码航空影像.1.2 无人机实景三维模型的构建利用无人机航拍获取的五镜头影像数据生产实景三维模型,具体流程如图2所示,详细步骤如下:1) 将预处理后的POS数据结合五个镜头影像数据做第一次无控制自由网空中三角测量,若连接点出现漏洞、稀少或不均匀、航线弯曲等现象,参考平差报告对区域连接点做检查,确保像点收敛值和相对定向误差不大于1个像素,对空洞区进行人工补点,对残差较大的连接点做剔除处理;2) 做第二次无控制自由网平差,重复第一次平差后的检查工作,直到自由网平差结果满足平差要求;3) 进行控制自由网平差,利用无控制自由平差的结果添加控制点,将空中三角测量结果转换到实际坐标位置,其中添加控制点时采用先周边后内部的刺点顺序. 具体操作如下:先在区域周围四个角刺点,并做一次平差,检查平差结果是否达到平差要求,若平差误差较大,进行内部刺点,每当刺两个控制点后又做一次平差处理,重复此操作,直到相对定向误差、检查点和控制点误差符合规定限差要求,每张影像至少200个匹配连接点,并停止操作.4) 在空中三角测量提取特征点的基础上做加密处理,利用密集点云生成表面模型,并赋予纹理,生成实景三维模型.图2 数据预处理流程2 基于建筑物屋顶轮廓的体模型遮蔽检测和遮蔽补偿2.1 基本原理生产TDOM的关键在于检测遮蔽,即寻找被遮蔽区域,消除双重投影问题[15]. 如图3所示,双重映射区域内投影的灰度值重复投影到正射影像上,假设a、b、c是原始像片上的像素,由中心投影原理可知,原始像片上a、b、c点采集的像素是建筑物顶部A、B、C坐标点处的特征,a′、b′、c′的灰度值对应建筑物屋顶A、B、C坐标点的特征信息,a″、b″、c″同样采集了原始像片a、b、c处的像素特征,即采集了建筑物屋顶A、B、C处的特征,这就导致正射影像上出现双重映射区域. 例如,点A(XA, YA, ZA)和点D(XD, YD, ZD)同时占用像点a(Xa, Ya)的像点信息,此时的投影像点顺序依次为a″、b″、c″和a′、b′、c′;有时两个点A、C同时占据了正射表面相同的一点F. 因此,需要合理地检测出被遮蔽区域,消除因航摄高度和相机倾斜带来的遮蔽现象,使得影像均匀地分布在实际地表位置上.图3 双重投影图4 无房檐与有房檐情况下的遮蔽区域通常情况下,遮蔽范围会因房檐的存在与否,产生不同的效果. 房檐存在时的遮蔽检测区域大于无房檐的情况. 图4为还原相机拍摄时刻的场景信息图,假设ABCD-EFGH-efgh是带房檐的建筑物体,分析如下:1) 不含房檐的遮蔽区域. 多边形ee'h'g'f'fe是建筑物ABCD-EFGH-efgh去除房檐情况下,只保留矩形EFGH-efgh的阴影区,记为Wshadow;多边形ee'h'g'f'fghe是Wshadow对地面物体形成的遮蔽区域,记为Wshading.2) 包含房檐的遮蔽区域. 多边形ee'a'd'c'b'f'fe是建筑物ABCD-EFGH-efgh在中心投影下的影子,记为Bshadow,多边形ee'a'd'c'b'f'fghe是Bshadow对地面物体形成的遮蔽区域,记为Bshading.3) 遮蔽区域的面积大小关系:Bshading>Wshading.在TDOM中影像位置被还原到真实地理位置上,生成结果难免会牺牲房檐正下方的物体(例如,靠近房门的少部分台阶,屋檐下摆放的花盆等),以确保屋顶信息的完整. 牺牲区域为正射投影下,建筑物环状房檐(ABCE-EFGH)在地面上的投影. 尽管带房檐时检测的遮蔽区域大于不带房檐时的遮蔽区域,但根据遮蔽补偿原理,遮蔽区域的纹理能在相邻航线上得到补偿,故不影响TDOM的生成.从以上分析可知遮蔽检测重视屋顶信息.通常,为了保证UAV飞行的安全,UAV飞行高度需要在建筑物上空保持一定的安全距离. 这就导致,即使使用多镜头传感器倾斜摄影,房檐下拐角处依然会出现影像的空白区域,生成的DSM会将原本直角的房檐曲面化,如图5所示,降低房屋边缘精度. 本文结合实景三维模型,采集建筑物顶部边缘信息,与DSM同时进行遮蔽检测.(a)房檐曲面化(b)曲面化放大图图5 影像缺失导致的房檐曲面化对检测到的遮蔽区域做纹理补偿. 采集被检测区域相邻航线上影像的纹理信息,对遮蔽区域做纹理补偿. 补偿原理如下:(1)式中:W代表某一遮蔽区域;n表示该遮蔽区域周围含有该遮蔽区域的所有影像;Ki 为第i张包含遮蔽区域的影像.当由于原始影像成像时气候环境差异过大导致的影像反光度、纹理信息差异较大的现象,在进行影像纠正时,可剔除差异过大的几张影像,前提是要保证剩下的影像能覆盖W区域;在不能保证整体覆盖W时,先采用差异较大的影像进行纠正,然后做匀光匀色处理,只是效果略有逊色. 所以,在数据采集过程中既要保证航线过高的重叠度[1],又要保证成像光线变化不大.逐一对整个测区的W区域进行补偿,即得:(2)式中:Wj代表整个测区的第j个遮蔽区域;Wj,b指当第j个遮蔽区域缺少影像时,补飞b张影像用于遮蔽区域纠正填补;U表示所有遮蔽区域都被完全填充.对研究区内所有检测得到的遮蔽区域做补偿纠正,并将纠正结果计算平差、整合,生成一副无缝、色彩亮度平衡的影像镶嵌图. 整合针对色彩差异进行匀光匀色处理,接边线的编辑和羽化处理.最后将处理过的镶嵌图分幅裁剪得到最终产品.2.2 实施方法基于上述基本原理,具体实施步骤为步骤1:获取建筑物顶部轮廓线. 基于前期生产的实景三维模型,依据建筑物顶部轮廓采集顶部边缘信息,将采集到的顶部轮廓线作为DTM生成的控制信息.步骤2:建筑物数字地面模型(DTM)生成.将步骤1中获取的带有地理空间坐标的建筑物顶部轮廓线嵌套在DSM上,生成三维建筑物的DTM.步骤3:TDOM生成. 结合步骤2中生成对象的DTM数据、空中三角测量生成的DSM和航片工程文件,在确保遮蔽补偿计算时,相片重叠度达到采集航空像片所设置的航向与旁向最大数值的前提下生产TDOM.步骤4:TDOM镶嵌处理.对步骤3中生产的TDOM进行不可视像元检查,通过矫正和自适应羽化处理,计算补偿不可视像元,生成一副完整的TDOM.3 结果与分析3.1 实景三维模型的空中三角测量分析实景三维模型的好坏最终影响到建筑物屋顶轮廓线的质量,而空中三角测量质量的好坏关系到实景三维模型的结果,在实验区域利用五镜头航空影像数据做空中三角测量平差时采用7个控制点就达到了实验要求. 将控制点在x、y、z方向的最大误差分别记为:Δx、Δy、Δz、在平面最大均方根误差记为:RMSEH、在高程最大均方根误差记为:RMSEV,从以上5个误差指标评价空中三角测量结果,如表2所示.表2 空中三角测量加密精度表点名Δx/mΔy/mΔz/mRMSH/mRMSV/m〛10.042-0.0660.0000.0280.003 20.049-0.147-0.0020.037-0.006 30.006-0.02 0.0000.0340.001 4-0.055-0.031-0.0010.0430.001 5-0.043-0.0270.0000.0120.002 60.082-0.0050.0010.0230.009 7-0.0430.020.0000.0240.006由表2可知,Δx、Δy、Δz分别为0.082 m、0.147 m、0.002 m;RMSEH为0.043 m,RMSEV为0.009 m.除Δy外,其余四个指标均小于10 cm;Δz和RMSEV达到毫米级. 5个误差指标均满足空中三角测量精度要求. 通过分析,利用POS辅助空中三角测量在添加少量控制点的情况下使得空中三角测量结果满足实验要求.3.2 TDOM成果基于五镜头航空影像建立的实景三维模型采集建筑物顶部轮廓信息生成三维建筑物DSM,随后通过遮蔽检测和遮蔽补偿,生成建筑物的TDOM. 由于实验区建筑物众多,挑选云南师范大学呈贡校区汇学3栋和同析3栋两栋建筑作对比分析. 如图6所示,其中图6(a)、(d)是在建筑物实景三维模型上采集顶部边缘线,当出现同一建筑物既有高屋顶和低屋顶时,建议分别采集各自的屋顶;都以五镜头影像为前提生成两种正射影像,对生成结果进行对比分析:图6(b)、(e)是生成的两张DOM图,图中清晰地显示每栋建筑具有各个方向的倾斜,并存在遮蔽现象(蓝色圆圈所标记);图6(c)、(f)是本文方法生成的TDOM图,其特征变化用红色圆圈标记.从图6中的DOM和TDOM的差异可以看出,本文提出的方法通过遮蔽检测生成的TDOM是对传统DOM的完善. 图7为整个实验区的TDOM图.(a)汇学3栋实景三维模型 (b)汇学3栋DOM (c)汇学3栋TDOM(d)同析3栋实景三维模型 (e)同析3栋 DOM (f)汇学3栋TDOM图6 汇学3栋与同析3栋实验结果图7 云南师范大学呈贡校区TDOM3.3 TDOM精度验证为了检验TDOM的精度,在野外实测6个点作为精度验证点,同时在TDOM上对应的6个影像点作为对比点,用实测点与影像点做误差分析. 如表3所示,Δx、Δy分别代表了影像点与野外实测点在x、y两个方向上的误差值.通过对比分析,x方向的最大误差为0.011 m,y方向的最大误差为0.015 m,符合CHT 9008.3-2010《基础地理信息数字成果1∶500、1∶1000、1∶2000数字正射影像图》平地平面位置中误差0.6 m的精度要求. 点位误差如表4所示.本方法生成的TDOM在x方向上的点位误差为0.007 m,y方向上的点位误差为0.009 m,整体点位误差M为0.011 m. 表3 TDOM平面精度检查表检查点xyΔxΔy 影像点01∗∗∗1.090∗∗∗9.780 实测点01∗∗∗1.082∗∗∗9.778 0.008 0.002影像点02∗∗∗2.940∗∗∗9.290 实测点02∗∗∗2.933∗∗∗9.288 0.008 0.002影像点03∗∗∗7.540∗∗∗2.330 实测点03∗∗∗7.529∗∗∗2.315 0.011 0.015影像点04∗∗∗2.970∗∗∗7.050 实测点04∗∗∗2.977∗∗∗7.051-0.007-0.001影像点05∗∗∗8.010∗∗∗1.390 实测点05∗∗∗8.007∗∗∗1.397 0.003-0.007影像点06∗∗∗4.840∗∗∗9.030 实测点06∗∗∗4.840∗∗∗9.017 0.000 0.013表4 TDOM控制点的点位误差对象μxμyMTDOM0.0070.0090.0114 结论本文提出了一种顾及建筑物屋顶轮廓体模型的TDOM生成方法,该方法以无人机搭载五镜头相机采集的云南师范大学呈贡校区影像数据为例实现了本文的方法,最终生成的TDOM的方向精度误差分别为1.1 cm和1.5 cm,高于制图规范60 cm的要求,是一种可行的方法.参考文献【相关文献】[1] LERMA J L, NAVARRO S, CABRELLES M, et al. Terrestrial laser scanning and close range photogrammetry for 3D archaeological documentation: the Upper Palaeolithic Cave of Parpall as a case study[J]. Journal of Archaeological Science, 2010, 37(3):499-507.DOI:10.1016/j.jas.2009.10.011.[2] CHEN N Y, RAV J Y, CHEN L C, et al. True orthophoto generation of built-up areas using multi-view images[J]. Photogrammetric Engineering and Remote Sensing, 2002,68(6): 581-588.[3] ZHOU G, CHEN W, KELMELIS J A, et al. A comprehensive study on urban true orthorectification[J]. IEEE Transactions on Geoscience and Remote Sensing, 2005,43(9):2138-2147.DOI:10.1109/TGRS.2005.848417.[4] 边馥苓,王潇.真正射影像生成中遮蔽区域的补偿[J].测绘科学,2009,34(3):81-83.[5] LIU L, LI X, LIU K, et al. Occlusion detection analysis based on two different DSM models in true orthophoto generation[C]//Geoinformatics 2008 and Joint Conference on GIS and Built Environment: Advanced Spatial Data Models and Analyses, SPIE, 2008. [6] OLIVEIRA H C, GALO M. Occlusion detection by height gradient for true orthophoto generation, using lidar data[C]//ISPRS Hannover Workshop, International Society for Photogrammetry and Remote Sensing 2013,40-1(W-1):275-280.DOI:10.5194/isprsarchives-XL-1-W1-275-2013.[7] OLIVEIRA H C, GALO M, DAL POZ A P. Height-Gradient-Based Method for OcclusionDetection in True Orthophoto Generation[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(11):2222-2226. DOI:10.1109/LGRS.2015.2459671.[8] WAN C Y, KING B A, LI Z. An assessment of shadow enhanced urban remote sensing imagery of a complex city-Hong Kong[J]. Isprs Journal of Photogrammetry and Remote Sensing, 2012,39-(B6):177-182.DOI:10.5194/isprsarchives-XXX1X-B6-177-2012.[9] HABIB A F, KIM E M, KIM C J. New metho dologies for true orthophoto generation[J]. Photogrammetric Engineering & Remote Sensing, 2007, 73(1):25-36.DOI:10.14358/PERS.73.1.25.[10] 任东风,许彪,路海洋.基于高程约束的真正射影像遮蔽检测算法[J].测绘通报,2012(6):39-42,50.[11] 肖卫峰,张良,孙大鹏,等.光线追踪遮挡检测算法[J].测绘学报,2014,43(8):862-868.[12] 潘慧波,胡友健,王大莹.从LiDAR数据中获取DSM生成真正射影像[J].测绘工程,2009,18(3):47-50.[13] WANG Q, YAN L, SUN Y, et al. True orthophoto generation using line segment matches[J]. The Photogrammetric Record, 2018,33(4). DOI:10.111/Phor.12229.[14] LI J, YAO Y X, DUAN P, et al. Studies on the three-dimensional (3D) modeling of UAV oblique photography with the aid of loop shooting[J]. ISPRS International Journal of Geo-Information, 2018, 7(9): 356. DOI:10.3390/ijgli 7090356.[15] SKARLATOS D. Orthophotograph production in urban areas[J]. The Photogrammetric Record, 2000, 16(94):643-650. DOI:10.1111/0031-868X.00144.。
浅述真正射影像制作的关键技术

浅述真正射影像制作的关键技术摘要: 本文简单介绍真正射影像的出现和发展现状,并对真正射影像制作中的关键技术做简单扼要的阐述。
关键词:真正射影像;TDOM;DSM;遮挡检测;阴影分析;像素工厂1引言测绘是一门应用性很强的学科,需求牵引是测绘科学发展的根本。
测绘4D 产品无疑是国家测绘的基础,产品的多样化是更是社会发展的需要。
在2006年出版的《中国测绘学科发展蓝皮书》中提到一种“真正射影像”的概念,书中认为,真正射影像在城市空间信息领域中应用前景非常广阔。
真正射影像这种全新的测绘产品开始引起普遍的关注。
本文就真正射影像制作中的关键技术做简单阐述,希望能在今后的测绘生产中产生积极的影响。
真正射影像图概念要阐述真正射影像图概念,先要从传统正射影像图讲起,然后通过比较两者的区别来理解真正射影像图概念和特点。
2.1 概念数字正射影像图(Digital Orthophoto Map,DOM)是利用数字高程模型(DEM)对经扫描处理的数字化航空像片,经逐像元进行投影差改正、镶嵌,按一定图幅范围裁剪生成的数字正射影像数据集。
它是同时具有地图几何精度和影像特征的图像,具有精度高、信息丰富、直观真实等特点。
数字真正射影像图(True Digital Orthophoto Map,TDOM)是利用数字表面模型(DSM),通过数字微分纠正技术,改正原始影像的几何变形,对整个测区进行影像重采样后,使影像视角被纠正为垂直视角而形成的影像图。
2.2 比较TDOM对影像重采样后的影像视角都被纠正为垂直视角,与传统的正射影像相比,在大比例尺影像图中,避免了高大建筑的倾斜对其它地物的遮挡,在拼接地区能够实现平滑自然的过渡。
单从纠正方式和建筑物效果来比较,传统DOM有如下特点:a、通过数字高程模型来纠正;b、会产生倾斜的建筑物;c、会产生一些掩蔽的区域。
而TDOM则是:a、通过数字表面模型来纠正;b、完全垂直的建筑物(屋顶能够正确定位);c、无掩蔽的区域。
利用数字建筑模型制作真正射影像的方法与实现
Land & Resources Herald文章编号:1672-5603(2016)01-086-5利用数字建筑模型制作真正射影像的方法与实现赵淑玲*,屈伟军(湖南省第二测绘院,湖南 长沙 410119)摘 要 分析了传统正射影像与真正射影像的区别,介绍了数字建筑模型及其生成数字表面模型的方法,简要阐述了真正射影像制作原理,介绍了目前主流的制作真正射影像的系统及其生产流程,进行了真正射影像生产试验。
关键词 数字建筑模型;真正射影像;数字微分纠正;遮蔽检测与补偿中图分类号:P283.49 文献标识码:AThe Method and Implementation of Making True Orthophoto MapUsing Digital Building ModelZhao Shuling, Qu Weijun(The Second Surveying and Mapping Institute of Hunan, Changsha Hunan 410119)Abstract: The differences between traditional orthophoto map and true orthophoto map are analyzed, the digital building model and how to use it to generate digital surface model are introduced, the principles of making true orthophoto map are brie fl y described, the mainstream systems of making true orthophoto map and its production processes are introduced, and a true orthophoto production test is implemented.Key Words: digital building model; true orthophoto; digital differential recti fi cation; occlusion detection and compensation*第一作者简介 赵淑玲,女,1969年生,地理信息工程专业,从事地理信息数据处理、三维建模、系统开发、国土调查等工作。
遮挡检测算法分析比较研究
【 摘 要】 真正射影像不仅具有地 图的几何精度 , 可以直接进行地物尺寸和距 离的测量 , 而且具有更好的视觉效果 有效的遮挡检 测是真正
,
射影像 制作 关键环 节, 国内外学者提 出了许 多遮挡检测算法 , 在进行遮挡 区域检测的过程 中各有优 劣 通过对主要 的遮挡检测算法原理和处理 过程进行对 比分析 , 总结 了各个算法的优缺点 , 为寻求 高效准确的遮挡检测算法提供参考 并提 供 了一 些 可 以改 进 的 建议
,
d e t e c t i o n a l g o r i t h m,i n e a c h h a v e a d v a n t a g e s a n d d i s a d v a n t a g e s i n t h e p r o c e s s o f t h e o c c l u s i o n d e t e c t i o n B a s e d o n t h e C O mp a r a t i v e a n a l y s i s o f t h e
.
【 A b s t r a c t ] T r u e o r t h o p h o t o h a s n o t o n l y t h e g e o m e t r i c a c c u r a c y o f m a p , c a n b e d i r e c t l y m e a s u r e d o b j e c t s i z e a n d d i s t a n c e . a n d h a s b e t t e r v i s u a l
使用测绘技术进行正射影像纠正的方法与步骤

使用测绘技术进行正射影像纠正的方法与步骤近年来,随着测绘技术的快速发展,正射影像纠正成为了地理信息领域中一个非常重要的环节。
正射影像纠正是通过对影像进行几何校正,使其具备真实的地理坐标。
本文将介绍一种使用测绘技术进行正射影像纠正的方法与步骤。
首先,进行影像预处理是正射影像纠正的基础工作。
在预处理过程中,我们需要对影像进行几何校正,去除影像中的扭曲和畸变。
这一步骤主要包括几何纠正和去除大气影响。
几何纠正是通过提取影像中的控制点,并与地面控制点进行匹配,从而获得影像的几何参数。
去除大气影响则是通过大气校正获取原始影像。
这里我们需要注意,影像预处理过程中需要合理选择控制点并进行精确的匹配,以确保纠正结果的准确性。
其次,进行影像配准是实现正射影像纠正的关键环节。
影像配准是将纠正后的影像与基准影像进行精确匹配,从而获得影像之间的几何变换关系。
在影像配准中,我们可以选择多种方法,例如基于特征的配准方法、基于变换模型的配准方法等。
其中,基于特征的配准方法主要包括特征提取、特征匹配和特征变换三个步骤。
通过对影像中的特征进行提取和匹配,并通过特征变换获得影像之间的几何变换关系,从而实现影像的准确配准。
接下来,进行影像融合是正射影像纠正的重要环节。
影像融合是将多幅影像融合为一幅影像,从而实现影像的融合展示和分析。
在影像融合中,我们需要考虑影像的颜色、亮度和对比度等方面的一致性。
影像融合可以使用多种方法,例如基于像素的融合方法、基于变换的融合方法等。
这里需要注意的是,在影像融合时需要综合考虑影像的空间一致性和光谱一致性,以确保融合结果的质量。
最后,进行影像校正是正射影像纠正的最后一步。
影像校正是通过对影像进行投影变换,将其投影到地图坐标系中,从而使影像具有真实的地理坐标。
在影像校正中,我们需要选择合适的坐标系和投影方法,以及确定栅格大小和像元分辨率等参数。
通过对影像进行校正,可以实现影像的实时测量和精确定位,并为后续的地理分析提供高质量的数据源。
航测知识无人机真正射影像的概念和制作原理

航测知识无人机真正射影像的概念和制作原理正射影像应同时具有地图的几何精度和影像的视觉特征,特别是对于高分辨率、大比例尺的正射影像图,它可作为背景控制信息去评价其他地图空间数据的精度、现势性和完整性。
然而作为一个视觉影像地图产品,影像上由于投影差引起的遮蔽现象不仅影响了正射影像作为地图产品的基本功能发挥,而且还影响了影像的视觉解译能力。
为了最大限度地发挥正射影像产品的地图功能,近几年来,关于真正射影像( True Orthophoto)的制作引起了国内外的广泛关注,本文主要对真正射影像的概念及制作原理进行简单介绍。
1)遮蔽的概念这里所说的遮蔽即遮挡,指的是由于地面上有一定高度的目标物体遮挡,使得地面上的局部区域在影像上不可见的现象。
航空遥感影像上的遮蔽主要有两种情况,一种是绝对遮蔽,比如高大的树木将低矮的建筑物遮挡了,使得被遮挡的建筑物在航空遥感影像上不可见。
另一种则是相对遮蔽,如图1所示,对于地面上的△ABC区域,它在右像片上不可见,即被遮挡了,但在左像片上是可见的;而对于地面上的△DEF区域,则正好相反。
图1 相对遮蔽示意图这说明对于相对遮蔽而言,影像上的丢失信息是可以通过相邻影响进行补偿的,而绝对遮蔽则做不到这一点。
以下只讨论相对遮蔽的情况。
航空遥感影像上遮蔽的产生与投影方式有关。
对于地物的正射投影,由于它是垂直平行投影成像,是不会产生遮蔽现象的(树冠等的遮挡除外),如图2(a)所示。
而传统的航空遥感影像,它是根据中心投影的原理摄影成像的,对地面上有一定高度的目标物体,其遮蔽是不可避免的。
对于中心投影所产生的遮蔽现象,其实质就是投影差,如图2(a)所示:图2 遮蔽情况分析示意图传统的正射影像制作方法主要是利用中心投影(包括框幅式中心投影或线中心投影)影像通过数字纠正的方法得到。
在纠正过程中,对原始影像上由一定高度的地面目标物体所产生的遮蔽现象在纠正后依然存在,这使得正射影像失去了“正射投影”的意义,使得正射影像在与其他空间信息数据进行套合时发生困难,使传统正射影像的应用受到一定的限制。
利用生成正射影像评估DEM之研究
訊雜比
相關係數
正確取樣出差異很大的灰階
錯誤取樣到相似灰階
實驗成果
實驗成果第組
其背景為兩正射影像 灰階的差異,而紅色 的方框表錯誤的點, 黃色的星號表相關係 數低於門檻值之匹配 點,藍色的十字表相 關係數高於門檻值之 錯誤匹配點,綠色的 外框表示有檢查的區 域。
實驗成果第組
其背景為兩正射影像 灰階的差異,而紅色 的方框表錯誤的點, 黃色的星號表相關係 數低於門檻值之匹配 點,綠色的外框表示 有檢查的區域。
利用生成正射影像評估之研究
報告流程
前言 實驗方法 實驗成果與分析 結論 參考文獻
前言
的生成是藉著影像匹配,找出在共軛影 像中的共軛點,利用前方交會的方式算 出地面的坐標。
但在複雜的真實世界裡,影像匹配總無 法達到所預期的成效,而會得到不正確 的高程資訊。
自動化的生成,常伴隨著人工的檢驗, 使得生產的效能大大的減弱。
前言(續)
本實驗的目的便是在於找出中,含有錯 誤的點位,或是確認出那些區域的都是 正確無誤的,如此在之後人工檢驗時便 能減少其工作量,進而提昇效率。
為了達成上述之目的,本實驗所採用的 方法為物空間匹配。
實驗方法
物空間匹配,即是利用正射影像間之匹配, 概念在於將匹配執行空間由像空間轉換至物 空間。
由於轉換至物空間所憑藉的就是及方位參數, 若的有錯誤,將會直接影響所產生出來的正 射影像,而正射影像間的匹配也會受到牽連。
本實驗便是基於此原理,由正射影像間的匹 配來評估的正確性。
正射影像之生成
為一規則網格資料, 每一網格都有其(), 代入共線式,反算 像片坐標,將坐標 配合方位參數,可 算出像片坐標,再 經仿射轉換算出影 像坐標。
卫星影像补全方案
卫星影像补全方案一、图像采集卫星影像补全方案的第一步是进行图像采集。
通过卫星遥感技术,获取覆盖目标区域的卫星影像。
这些影像应具有高分辨率和高光谱分辨率,以便于后续的图像处理和信息提取。
二、数据预处理为了提高后续处理的效率和精度,需要进行数据预处理。
预处理包括辐射定标、大气校正、几何校正等步骤,以消除图像中的辐射误差和几何畸变,提高图像的精度和可靠性。
三、特征提取特征提取是利用图像处理和计算机视觉技术,从卫星影像中提取出有用的特征信息。
这些特征包括但不限于光谱特征、纹理特征、形状特征等,用于支持后续的图像分类和分割。
四、图像分类与分割图像分类与分割是利用已经提取的特征信息,对卫星影像进行分类和分割。
分类是将影像划分为不同的地物类型,如水体、植被、建筑物等;分割则是将影像划分为更小的区域,以便于对每个区域进行更精细的处理和分析。
五、缺失区域填充在卫星影像中,可能会存在一些缺失的区域,这些区域可能是由于云层遮挡、传感器故障等原因造成的。
为了补全这些缺失区域,可以采用插值算法、机器学习算法等手段,利用已知区域的特征信息,对缺失区域进行填充。
六、精度评估与优化在完成缺失区域填充后,需要对补全结果进行精度评估。
通过比较补全后的影像与原始影像,可以评估出补全算法的精度和可靠性。
根据评估结果,可以对算法进行优化和改进,以提高补全效果。
七、可视化展示最后,将补全后的卫星影像进行可视化展示。
通过将补全结果与原始影像进行叠加,可以直观地看出补全效果。
同时,也可以将补全后的影像与其他数据源进行对比和分析,为后续的地理信息系统(GIS)分析和决策提供有力的支持。
真正射影像制作及后处理应用
框幅式中心投影的数字微分纠正
基本方法:根据DEM和像片的有关参数, 利用相应的构像方程或按一定的数学模型, 从原始的数字影像出发,通过解析计算和 灰度赋值得到相应的正射影像。
直接法数字微分纠正
X = φx (x,y); Y = φy (x,y)
间接法数字微分纠正
x = fx (X,Y) ; y = fy (X,Y)
采用的是DEM 未顾及目标高度
遮蔽的实质是投影差;在城市大比列尺影像上尤为 严重;使得正射影像不是严格的“正射” 。
正射影像上遮蔽的利弊分析
不利之处
遮蔽的存在影响了正射影像的地图功能 影响了被遮蔽区域的信息获取和解译
正射影像上遮蔽的利弊分析
有利之处
遮蔽的存在增加了影像的立体感和真实感 有助于目标物体的解译 有利于目标物体的三维建模和几何量算(通过 生成立体匹配片构成可量测虚拟现实)
制作真正射影像的理论流程
基本流程如下:
1)根据完整的数字地表模型(DSM)进行数字微分纠正, 消除原始影像中由于成像投影产生的几何形变与位移;
2)检测并标识地表成像时的遮挡区域,确保在微分纠正 中采集正确的纹理信息;
3)为了信息完整和影像美观,需要保证遮挡区域的纹理 正确与完整,对遮挡区域进行补偿处理。
c
b a
S
原始影像
A
C B
A0
纠正影像
正射影像制作
关于影像镶嵌:一张正射影像一般不能 覆盖一幅图(标准分幅)的范围(除非小 比例尺的卫星影像),因此,将多张像片 拼成整幅影像图的过程称为影像镶嵌。
正射影像制作
影像镶嵌内容: 几何镶嵌 辐射镶嵌(又叫匀光处理),是重点和难
点之一,特别是对彩色影像。匀光处理主要 是利用直方图进行,看直方图分布是否协调 一致。
真正射影像生成的多边形反演成像遮蔽检测方法
真正射影像生成的多边形反演成像遮蔽检测方法钟成;黄先锋;李德仁;李卉【期刊名称】《测绘学报》【年(卷),期】2010(039)001【摘要】遮蔽检测是真正射影像生成的关键技术.提出一种基于多边形反演成像(polygon based inversion imaging,PBI)的遮蔽检测方法.利用建筑物表面多边形内部互不遮蔽的特点,以多边形为单元将建筑物逆投影到像方,反演成像时的目标状态,获得目标之间、多边形之间的遮蔽关系.为确保算法的稳健性和保真度,提出:①可疑区域增长法,稳健地栅格化复杂3维建筑物模型;②综合滤波模型用于消除多边形边界噪声.最后利用实例比较z-buffer方法,基于射线角度方法和PBI方法的遮蔽检测效果.结果表明,PBI算法的有效性和稳健性较好.【总页数】6页(P59-64)【作者】钟成;黄先锋;李德仁;李卉【作者单位】武汉市城市规划信息中心,湖北,武汉,430014;武汉大学测绘遥感信息工程国家重点实验室,湖北,武汉,430079;武汉大学测绘遥感信息工程国家重点实验室,湖北,武汉,430079;武汉大学测绘遥感信息工程国家重点实验室,湖北,武汉,430079;中国地质大学(武汉)空间科学技术研究中心,湖北,武汉,430074【正文语种】中文【中图分类】P237【相关文献】1.面向大规模真正射影像生产的快速遮蔽检测方法 [J], 钟成;李卉;黄先锋2.基于底点辐射距的真正射影像遮蔽区自动检测算法 [J], 王仁礼;王一;隋春玲;杨彦通3.非规则正射影像镶嵌多边形网络自动生成 [J], 项琳;岳贵杰;杜黎明4.Amorphium Pro中的遮蔽法—在绘画中使用遮蔽法制作特效和增加多边形 [J], 陈文5.基于无人机实景三维模型的真数字正射影像生成方法 [J], 成李博;段平;李佳;姚永祥;李晨;王云川因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
法中的 Rudin2TV 模型修复算法 , CDD 算法 , 高次偏微分方 程 Euler弹性曲线模型算法 , 以及基于样本的纹理合成算 法 。如图 3所示 , a为原始图像 , b为受损图像 , c为基于 样本的纹理合成方法结果 , d、 e、 f分别为全变分 Rudin模 型 , CDD 算法 , Euler弹性模型算法的结果 。由结果可以看 出 , 基于样本的纹理合成算法结果最为精确 , 保持了完整 的栅栏结构信息及清晰的纹理信息 ; 而 Rudin2TV 模型方法 由于缺少几何特征的考虑 , 结果则不 尽如 人 意 。 CDD 和 Euler由于引 入 了 曲 率 , 结 果 略 好 于 Rudin2TV 模 型 方 法 , 但仍存在误差 。
中 , IB 表示建筑物区域 。而计算 D ( p)时等照度的标量由模
板内有效像素的梯度最大值求得 , 如式 (5) 。
∑ C ( p) =
q∈ψp∩( I-Ω - IB ) C ( q) ψ
(4)
p
I⊥p = m ax ( IP | p ∈ψp ∩ ( I - Ω - IB ) ) ( 5)
另外 , 原算法中 , 进行模板匹配的时候往往是整幅影
【摘 要 】 经过正射纠正后的真正射影像 , 往往会出现建筑物遮挡造成的影像信息缺失区域 。本文采用相邻影 像补偿 、图像修复两种方法依次对这些缺失区域进行补偿 。对于因相邻影像信息不足 , 仍未补偿的剩余像素 , 在 引入 DBM 模型的基础上 , 进一步提出一种基于有效像素的样本纹理合成方法 , 实验结果证明 , 该方法优于常规 图像修复算法 , 生成了完整的真正射影像 。 【关键词 】真正射影像 ; 遮蔽区域 ; 像素补偿 ; 有效像素 ; 纹理合成 【中图分类号 】TP75 【文献标识码 】A 【文章编号 】100922307 (2009) 0320081203
本实验利用真正射纠正方法 , 将原始影像航向及旁向 的三幅相邻影像分别纠正 , 生成了副正射影像 。如图 1 所 示 , 每幅影像通过精确纠正后 , 均留下了遮蔽区域 。主影 像在利用第 2节介绍的原理进行相邻像素补偿后 , 仍然有 部分区域没有被补偿 , 如图 2所示 。
图 1 待修复的正射影像 图 2 补偿后的正射影像 及其相邻正射影像
示法向量方向 。D ( p) 主要由等照度和修复边缘的法向量
决定 , 当区域内有强边缘时 , 该区域的 D ( p) 值会较大 。
于是 , 待修复区域像素的优先权由该像素模板窗口内的置信
度的大小及边缘的强弱决定 。优先权最大的值 , 将首先被修
复 , 修复的准则是寻找最佳匹配模板 , 复制对应像素 。
位于房屋周围 , 遮蔽区域的边界往往紧邻房屋边缘 。房屋
的边缘具有明显的结构特征 , 如果按照该算法的原理 , 反
而更加容易错误地将房屋屋顶的纹理填充至遮蔽区域 , 因
此 , 正射影像的修复应该按照自身特点来进行 。
Crim inisi提出的基于样本的纹理合成算法为图像修复中
较成熟的算法 。本文将该算法进行相应改进 , 对真实纹理修
达式如 (2) 、 (3) 式所示 :
∑ C ( p) =
q∈ψp∩( I-Ω) C ( q) ψ
(2 34卷
D ( p) =
I⊥p ·np α
(3)
Ψp表示模板大小 , Ι表示整个影像范围 , Ω表示待修复
区域 , (2) 式反映了当以某像素为中心的模板内置信度的和 越高的时候 , 该像素的置信度越高 ; I⊥p 表示等照度 , np 表
为 1。
3) 计算遮蔽区域每个边界点优先权 P ( p) 。其中 , C
( p) 由式 ( 4) 求得 , D ( p) 主要由等照度和边界
的法向量求得 , 等照度的值由式 ( 5) 求得 。
4) 在一定半径范围内 , 对优先权最大的边界点进行模
板匹配 , 并将对应的有效像素赋给待修复模板内的
遮挡像素 。
Variation)算法和 TV ( Total Variation)算法 [9 ] , 该类算法主要 利用建立的图像数学模型和先验模型 , 将修复问题转化为
变分问题 [12 ] 。
在实际应用中 , 两类算法各有优缺点 , 基于纹理合成 的修复方法中 , 修复区域的颜色更为逼真 , 损失较小 , 但 对于具有结构性的信息没有很好的延续 , 容易出现断裂现 象 ; 而基于结构的修复方法一般都是利用扩散原理 , 因此 能更好的保持结构特征的延续 , 但是修复区域容易出现模
最可靠像素 [4 ] , 补偿到该遮挡点上 。 Yang利用地物点摄影方向和铅垂线的夹角来选择补偿
像素 , 如果夹角越小 , 视线方向越垂直 , 可靠性也越高 , 该方法的本质和 Zhou的方法是一致的 , 都是选取投影差改 正较小的点作为补偿点 。
然而在实际情况中 , 通过相邻影像的对应像素补偿并 不能保证遮蔽地区的完整恢复 。遮蔽点的可见性与摄影中
复后的正射影像做进一步的完整补偿 。通过引入建筑物的模
型 , 区分建筑物区域和非建筑物区域 , 在修复的时候减少建
筑物强边缘的干扰 。其中 , 建筑物区域和遮蔽区域内的像素
被统称为非有效像素 , 而其余区域的像素称为有效像素 。计
算优先权时 , 将排除非有效像素的干扰 , 避免建筑物屋顶纹
理的扩散 。计算置信度时 , C ( p)的值将由式 ( 4) 得到 , 其
第 34卷第 3期 2009年 5月
测绘科学 Science of Surveying and M app ing
Vol134 No13 M ay
真正射影像生成中遮蔽区域的补偿
边馥苓 ①② , 王 潇 ①②
( ①武汉大学空间信息与数字工程研究中心 ,武汉 430079; ②武汉大学测绘遥感信息工程国家重点实验室 , 武汉 430079 )
5) 重新确定边界 , 重复 3) 、4) , 直到区域修复完毕 。
该方法保留了原有方法的优点 , 适应于正射影像的遮
挡补偿这种特殊的影像修复 。
3 实验结果与分析
本实验分别对正射影像的遮蔽区域利用相邻影像进行 了真实像素的补偿以及基于有效像素对剩余缺失信息进行
完整的纹理修复 。实验选取 10272 m2 范围的昆明城市地区 彩色航空影像作为实验数据 , 通过真正射影像纠正方法生 成主正射影像 , 该影像上黑色像素区域即为已检测出且需 补偿的遮蔽区域 , DBM 模型由 V irtuOzo软件量测得到 。 311 相邻影像的像素补偿
作者 简 介 : 边 馥 苓 ( 19412) , 女 , 教 授 , 博士生导师 , 国际软件学院空间 信息与数字工程研究中心主任 , 现从 事地理信息系统 、摄影测量及其应用 方面的研究 。
E2mail: flbian @w tusm1 edu1 cn
收稿日期 : 2008211218
0。距离地底点越近 , 投影差越小 , 因此可以在待选副影像 的对应像素中 , 选择距离地底点最近的地物对应像素作为
心高度 , 建筑物高度 , 建筑物在摄影方向离地底点的距离
等因素有关 [4 ] 。当建筑物较为拥挤 , 飞行高度较低等情况 下 , 往往不能完整的对遮蔽区域进行补偿 。此时为了正射 影像的完整性和美观性 , 应对剩余的遮蔽区域作进一步纹 理修复 。
212 基于有效像素的样本纹理合成算法 图像修复的方法是图像复原问题中的重要内容 , 在修
复受损图像资料 、古建筑物保护 、目标隐藏等方面有着广
泛应用 [11, 12 ] 。图像修复一般分为两类 , 一类是纹理合成算 法 , 这类算法可以利用纹理样本修复较大的缺失区域 ; 另 一类是基于结构的修复技术 , 用于修复较细小的缺损 。纹 理合成算法中最常用的方法是基于样本的纹理合成算法 。
取一个以某像素为中心的窗口 , 计算其他像素窗口与该窗
1 引言
城市地区航空影像上 , 建筑物往往对周围地面及地物 造成了遮挡现象 。通过真正射影像纠正的方式将地面及建 筑物进行精确纠正后 [1, 2 ] , 正射影像上会留下被建筑物遮挡 的影像信息缺失区域 。该问题将影响正射影像的使用和其 功能的发挥 , 因此需要对遮蔽区域进行补偿 。遮蔽区域补 偿一般有如下三种处理方式 [3 ] : 以特殊颜色 (如黑色 )补充 到遮蔽区域 ; 以相邻影像上可见的对应像素补充到遮蔽区 域 ; 通过图像修复的方法 , 用该影像上的已有信息推测出 遮蔽区域的信息 , 填补到像素缺失区域 。第一种方法保留 了原始可见情况 , 但是从美观和完整性来说都是不足的 。 第二种方法利用了真实信息 , 最为准确可靠 。 Zhou、 Sheng 等人都通过一定的准则在不同的相邻影像上选择最优像素 进行补偿 [4, 5 ] 。然而这种方式往往不能对遮蔽区域完全补 偿 [4 ] 。第三种用的是非真实纹理 , 不能代表实际的地物信 息 。对于较简单 、或纹理重复的区域 , 这种补偿方式能保 证影像的连续性和完整性 , 该方法属于图像复原领域 , 已 有不少较成熟的算法 , 如偏微分方程算法 、变分算法 、纹 理合成算法等等 [6210 ] , 然而也有其各自的适用范围 。本文 首先利用相邻影像的最佳对应像素对遮蔽区域进行补偿 , 然后提出一种基于样本的纹理修复与 DBM 模型相结合的方 法对剩余区域进行完整修复 。
2 正射影像像素补偿
211 相邻正射影像补偿原理 最为可靠的正射影像像素补偿方式是选取原始影像相
邻像片上的对应像素补偿到影像缺失区域 。补偿信息来源 于航向及旁向上重叠的相邻影像 。相邻影像之间的视角越 丰富 , 就越能获取更多的缺失像素 。
当相邻影像信息较为丰富时 , 主影像上被遮挡的区域 即可在不同的相邻副影像上获取到对应像素 , 此时需要选 取最可靠的正射影像点 。 Zhou利用不同影像上的地物点纠 正的可靠性来进行选择 。一般来说 , 正射影像上投影差改 正较小的区域 , 其纠正的可靠性会更高 。主垂线与地面的 交点称为地底点 , 显然 , 该点在影像上的投影差最小 , 为