仪表CAN通讯协议.pdf
can总线通信协议
can总线通信协议CAN总线通信协议。
CAN(Controller Area Network)总线通信协议是一种广泛应用于汽车、工业控制和其他领域的串行通信协议。
它的出现极大地推动了现代汽车电子系统的发展,提高了汽车电子系统的可靠性和安全性。
本文将对CAN总线通信协议的基本原理、特点和应用进行介绍。
首先,CAN总线通信协议采用了一种先进的非冲突、非阻塞的通信机制,能够支持多个节点同时进行通信,具有很高的抗干扰能力。
它采用了差分信号传输技术,能够有效地抵抗电磁干扰和噪声干扰,保证数据传输的稳定性和可靠性。
其次,CAN总线通信协议具有很高的实时性和可靠性。
它采用了优先级识别和非阻塞传输的机制,能够保证重要数据的及时传输,避免数据丢失和延迟。
这使得CAN总线通信协议在汽车电子系统等对实时性要求较高的领域得到了广泛的应用。
此外,CAN总线通信协议还具有很高的灵活性和可扩展性。
它采用了分布式控制的网络结构,支持多个节点同时进行通信,能够很好地适应不同系统的需求。
同时,CAN总线通信协议还支持数据帧的优先级设置和数据长度的动态调整,能够很好地适应不同数据传输需求。
在实际应用中,CAN总线通信协议被广泛应用于汽车电子系统、工业控制系统、航空航天领域等。
在汽车电子系统中,CAN总线通信协议能够实现各种传感器、执行器和控制单元之间的高效通信,提高了汽车电子系统的整体性能和可靠性。
在工业控制系统中,CAN总线通信协议能够实现各种设备之间的快速数据交换,提高了生产线的效率和稳定性。
在航空航天领域,CAN总线通信协议能够实现飞行器各个子系统之间的高效通信,提高了飞行器的整体性能和安全性。
总的来说,CAN总线通信协议作为一种先进的串行通信协议,具有很高的抗干扰能力、实时性、可靠性、灵活性和可扩展性,被广泛应用于汽车、工业控制和航空航天等领域,推动了现代电子系统的发展,提高了系统的整体性能和可靠性。
相信随着技术的不断发展,CAN总线通信协议将在更多领域得到应用,为人类社会的发展做出更大的贡献。
英搏尔CAN通讯协议 (

珠海英搏尔珠海英搏尔((控制器-仪表仪表))CAN 通讯协议1、概述 本协议规定汽车CAN 网络中电机控制器向仪表发送的信息。
2、引用标准 SAE J1939-21。
3、物理接口 本协议采用CAN2.0B 标准,通讯波特率为250kbps ,数据中未使用或者保留的字节约定为0x00。
4、协议数据单元协议数据单元((PDU )格式 SAE J1939-21规范规定两种PDU 格式:PDU1格式(PS 为目标地址)和PDU2格式(PS 为组扩展),PDU2为不指定特定目标地址的传输,本标准选用PDU2格式。
5Byte 低功耗模式0xAA-低功耗,其它-无效6Byte 小计里程低字节7Byte 小计里程高字节0.1km/bit4 0 0 248 16 1548Byte 保留6、数据帧二定义OUT IN ID 通讯周期数据位置数据备注ID=10F8108D1Byte 直流电压低字节2Byte 直流电压高字节0.1V/bit3Byte 电机电流低字节4Byte 电机电流高字节0.1A/bitP R DP PF PS SA5Byte 电机温度低字节6Byte 电机温度高字节0.1℃/bit7~8 Byte 保留控制器仪表4 0 0 248 16 14150ms附:交流控制器故障码说明编号名称报警方式处理方式故障对策01 高踏板故障长鸣不运行检查踏板并归位02 预充电故障一长两短不运行检查电源板有无明显损坏,检查电源板与控制板之间的排线是否可靠连接。
03 过流一长三短停机第一步调整控制参数,第二步调整输出力矩,如不能解决问题则返厂维修。
04 控制器过热一长四短停机检查风扇是否正常工作,风道是否顺畅。
05 主回路断电一长五短停机检查主回路保险、接触器、急停开关等。
06 电流采样电一长六短停机返厂维修。
路故障08 BMS故障一长八短停机BMS故障或者电池组异常。
09 电池组欠压一长九短停机需充电。
10 电池组过压一长十短停机检查电池是否正常,适当减小能量回馈。
CAN通讯协议

CAN通讯协议协议名称:Controller Area Network (CAN) 通讯协议一、引言CAN通讯协议是一种用于控制器之间进行高速、可靠通讯的协议。
本协议旨在定义CAN通讯协议的规范,以确保不同制造商的控制器能够互相通讯,并实现数据的可靠传输。
二、范围本协议适用于使用CAN总线进行通讯的控制器设备,包括但不限于汽车电子控制单元(ECU)、工业控制器、航空航天设备等。
三、术语定义1. CAN总线:一种串行通讯协议,用于在控制器之间进行数据传输。
2. 数据帧:CAN总线上的数据传输单位,包括标准帧和扩展帧两种类型。
3. 标准帧:具有11位标识符的数据帧,用于传输较短的数据。
4. 扩展帧:具有29位标识符的数据帧,用于传输较长的数据。
5. 帧ID:用于唯一标识数据帧的标识符。
6. 数据长度码(DLC):用于表示数据帧中实际数据的长度。
7. 数据域:数据帧中用于传输实际数据的部分。
8. 帧检验序列(FCS):用于检验数据帧传输过程中是否发生错误的序列。
9. 帧间隔:两个连续数据帧之间的时间间隔。
四、通讯规范1. 数据帧格式1.1 标准帧格式:标识符(11位)+ RTR位(1位)+ 数据长度码(4位)+ 数据域(0-8字节)+ FCS(15位)+ 帧间隔(3位)1.2 扩展帧格式:标识符(29位)+ RTR位(1位)+ 数据长度码(4位)+ 数据域(0-8字节)+ FCS(15位)+ 帧间隔(3位)2. 数据帧传输2.1 发送数据帧:控制器在发送数据帧之前,应先检查总线是否空闲。
如果总线空闲,则发送数据帧;否则,等待总线空闲再发送。
2.2 接收数据帧:控制器在接收数据帧时,应先检查CRC是否正确。
如果CRC正确,则接收数据帧;否则,丢弃数据帧。
3. 错误处理3.1 位错误:如果接收到的数据帧中存在位错误,则控制器应发送错误帧,并等待重发。
3.2 标识符错误:如果接收到的数据帧中的标识符与控制器期望的标识符不匹配,则控制器应发送错误帧,并等待重发。
仪表通讯协议
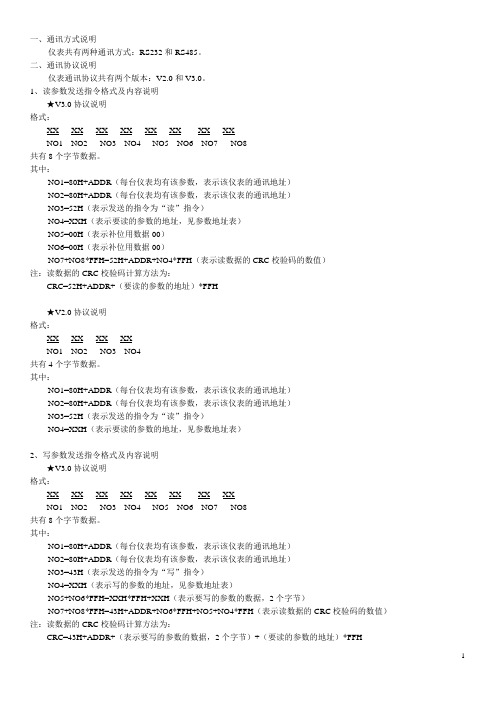
一、通讯方式说明仪表共有两种通讯方式:RS232和RS485。
二、通讯协议说明仪表通讯协议共有两个版本:V2.0和V3.0。
1、读参数发送指令格式及内容说明★V3.0协议说明格式:XX XX XX XX XX XX XX XXNO1 NO2 NO3 NO4 NO5 NO6 NO7 NO8共有8个字节数据。
其中:NO1=80H+ADDR(每台仪表均有该参数,表示该仪表的通讯地址)NO2=80H+ADDR(每台仪表均有该参数,表示该仪表的通讯地址)NO3=52H(表示发送的指令为“读”指令)NO4=XXH(表示要读的参数的地址,见参数地址表)NO5=00H(表示补位用数据00)NO6=00H(表示补位用数据00)NO7+NO8*FFH=52H+ADDR+NO4*FFH(表示读数据的CRC校验码的数值)注:读数据的CRC校验码计算方法为:CRC=52H+ADDR+(要读的参数的地址)*FFH★V2.0协议说明格式:XX XX XX XXNO1 NO2 NO3 NO4共有4个字节数据。
其中:NO1=80H+ADDR(每台仪表均有该参数,表示该仪表的通讯地址)NO2=80H+ADDR(每台仪表均有该参数,表示该仪表的通讯地址)NO3=52H(表示发送的指令为“读”指令)NO4=XXH(表示要读的参数的地址,见参数地址表)2、写参数发送指令格式及内容说明★V3.0协议说明格式:XX XX XX XX XX XX XX XXNO1 NO2 NO3 NO4 NO5 NO6 NO7 NO8共有8个字节数据。
其中:NO1=80H+ADDR(每台仪表均有该参数,表示该仪表的通讯地址)NO2=80H+ADDR(每台仪表均有该参数,表示该仪表的通讯地址)NO3=43H(表示发送的指令为“写”指令)NO4=XXH(表示写的参数的地址,见参数地址表)NO5+NO6*FFH=XXH*FFH+XXH(表示要写的参数的数据,2个字节)NO7+NO8*FFH=43H+ADDR+NO6*FFH+NO5+NO4*FFH(表示读数据的CRC校验码的数值)注:读数据的CRC校验码计算方法为:CRC=43H+ADDR+(表示要写的参数的数据,2个字节)+(要读的参数的地址)*FFH★V2.0协议说明格式:XX XX XX XX XX XXNO1 NO2 NO3 NO4 NO5 NO6共有4个字节数据。
CAN通讯协议

CAN通讯协议协议名称:CAN通讯协议一、引言CAN(Controller Area Network)通讯协议是一种广泛应用于汽车、工业控制和其他领域的串行通信协议。
该协议基于事件驱动的通信机制,具有高效、可靠和实时性的特点。
本协议旨在规范CAN通讯协议的标准格式,以确保不同设备之间的互操作性和数据传输的准确性。
二、术语和定义1. CAN总线:指用于连接CAN节点的传输介质,通常为双绞线。
2. CAN节点:指连接到CAN总线上的设备或系统。
3. 帧(Frame):指CAN通讯中的数据单元,包含标识符、数据、控制位等信息。
4. 标识符(Identifier):用于定义CAN帧的类型和优先级。
5. 数据(Data):指CAN帧中传输的实际信息。
6. 控制位(Control Bits):用于指示CAN帧的状态和控制信息。
三、协议规范1. CAN帧格式CAN帧由标识符、数据、控制位等组成,其格式如下:- 标准帧(Standard Frame):11位标识符+0-8字节数据。
- 扩展帧(Extended Frame):29位标识符+0-8字节数据。
- 远程帧(Remote Frame):11位或29位标识符,用于请求数据而不包含实际数据。
2. 标识符- 标准标识符:11位二进制数,用于定义CAN帧的类型和优先级。
- 扩展标识符:29位二进制数,用于定义CAN帧的类型和优先级。
3. 数据传输- 数据长度:CAN帧中数据长度可变,最多可传输8字节的数据。
- 数据传输方式:CAN通讯采用异步传输方式,节点之间通过CAN总线进行数据交换。
- 数据传输速率:CAN总线的数据传输速率可根据系统需求进行调整,常见的速率有125kbps、250kbps、500kbps和1Mbps等。
4. 错误检测- 奇偶校验:CAN帧中的标识符和数据采用奇偶校验,以确保数据的完整性。
- 位错误检测:CAN帧中的控制位包含了位错误检测的信息,用于检测传输过程中的错误。
can总线通讯协议书
can总线通讯协议书甲方(以下简称“甲方”):地址:法定代表人:职务:联系电话:乙方(以下简称“乙方”):地址:法定代表人:职务:联系电话:鉴于甲方与乙方就CAN总线通讯技术的应用与合作达成一致,根据《中华人民共和国合同法》及相关法律法规的规定,经双方协商一致,特订立本协议书。
第一条协议目的1.1 本协议旨在明确双方在CAN总线通讯技术领域的合作内容、权利与义务,以及双方应遵守的规范和标准。
第二条合作内容2.1 甲方同意向乙方提供CAN总线通讯技术的相关支持与服务。
2.2 乙方同意按照本协议的规定,使用甲方提供的CAN总线通讯技术,并支付相应的费用。
第三条技术提供与使用3.1 甲方应保证提供的CAN总线通讯技术符合国家相关标准和行业规范。
3.2 乙方应保证在协议约定的范围内使用CAN总线通讯技术,不得用于非法目的。
第四条费用与支付4.1 双方应根据本协议的约定,确定技术使用的费用及支付方式。
4.2 乙方应按照约定的时间和方式向甲方支付相应的费用。
第五条保密条款5.1 双方应对在合作过程中知悉的商业秘密和技术秘密负有保密义务。
5.2 未经对方书面同意,任何一方不得向第三方披露、泄露或允许第三方使用上述保密信息。
第六条知识产权6.1 甲方提供的CAN总线通讯技术及相关知识产权归甲方所有。
6.2 乙方在本协议约定的范围内使用甲方的技术,不得侵犯甲方的知识产权。
第七条违约责任7.1 如一方违反本协议的约定,应承担违约责任,并赔偿对方因此遭受的损失。
7.2 违约方应支付违约金,具体金额由双方协商确定。
第八条协议的变更与解除8.1 本协议的任何变更或补充,应经双方协商一致,并以书面形式确认。
8.2 双方可协商一致解除本协议,但应提前通知对方。
第九条争议解决9.1 本协议在履行过程中发生的任何争议,双方应首先通过友好协商解决。
9.2 如协商不成,双方同意提交甲方所在地人民法院通过诉讼方式解决。
第十条其他10.1 本协议未尽事宜,双方可另行协商解决。
仪表通讯协议书

仪表通讯协议书仪表通讯协议是一种规范,用于定义设备或系统之间的通信方式和协议。
它主要定义了通信的数据格式、传输速率、错误处理和同步等相关规则。
这种协议的使用能够确保设备之间的互联性和正确性。
一份仪表通讯协议通常包括以下内容:1. 数据格式:协议规定了通信中使用的数据格式,包括数据的编码方式、数据的大小端顺序等。
例如,可以使用ASCII编码表示文本数据,使用二进制编码表示图像、音频等数据。
2. 传输速率:协议规定了数据传输的速率,也就是每秒传输的数据位数。
该速率决定了通信的效率,通常以波特率表示。
3. 错误处理:协议规定了在数据传输过程中发生错误时的处理方式。
常见的错误处理方式包括检验和、纠错码等。
4. 同步机制:协议规定了设备之间进行通信时的同步方式。
同步机制确保了数据的正确传输,防止通信中出现数据丢失或乱序的情况。
5. 控制命令:协议规定了设备之间进行通信时使用的控制命令。
控制命令用于设备之间的互动和控制,例如启动、停止、设置参数等。
6. 应答机制:协议规定了设备接收到数据后的应答方式。
应答机制用于确认数据的正确接收,并可以返回必要的信息或状态。
7. 扩展性:协议应具备一定的扩展性,以便将来可以根据需求进行升级和扩展。
仪表通讯协议的设计需要满足以下原则:1. 简洁性:协议应该尽可能简洁明了,以便设备之间能够快速理解和解析。
2. 可靠性:协议应具备一定的容错机制,以确保数据的正确传输和接收。
3. 兼容性:协议应考虑到设备的兼容性,以便不同厂家的设备可以进行互联。
4. 安全性:协议应具备一定的安全机制,以保护通信数据的机密性和完整性。
总之,仪表通讯协议在现代工业中起到了至关重要的作用。
它不仅提供了设备之间的通信准则,还保证了设备之间的互联性和正确性。
通过遵循这样的协议,各种设备可以实现数据的交换、控制和监测,进而提高工作效率和生产质量。
因此,在设计仪表通讯协议时必须综合考虑实际需求,确保协议的可靠性、兼容性和安全性。
德尔福-仪表CAN通讯

整车电源
65271
168
0 18 FE F700
5-6
bit
0
V
0-+
V
周期:1000 ms
5-6位和7-8位都能发出,建议两个都用。或者根据其他家的统一为其中一个。
158
7-8
14
排气制动
61440
0x18F0000F
6
all
1%/bit
-125%
周期:100ms
需求扭矩百分比:
排气制动不起作用时为125
当排气制动起作用是0;从byte6的1、2位来看,排气制动不起作用时为01,当排气制动起作用是00.
请咨询仪表厂家能否通
65132
0x0CFE6CEE
5-6
all
bit
0
rpm
0 -+
周期:50ms,半轴转速,用于档位识别
1624
7-8
all
1/256km/h/
0
km/h
周期:50ms
10
油含水灯(需要水位传感器进入ECU)
65279
97
0x 18FEFF00
1
1,2
states
0-1
周期:10ms
00,灭灯,
01,亮灯,水位超警戒
ALL18ECFF00的报文(第5、6、7字节分别为FF CA FE的报文)后,60ms后接收到ID为18EBFF00的报文,为多包报文的第一包,其第一字节表示当前是第几帧(01表示为第一帧,02表示为第二帧)数据,第二字节为灯的信息(仪表需要的信息)
3
PACKET 1
SVS&MIL适用于多个故障
60415
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
模式一:电池基本数据
BMS : CAN 总线通讯规范(仪表)
1.通讯规范
数据链路层应遵循的原则
总线通讯速率为:250Kbps
数据链路层的规定主要参考 CAN2.0B 和 J1939 的相关规定。
使用 CAN 扩展帧的 29 位标识符并进行了重新定义,以下为 29 标识符的分配表:
其中,优先级为 3 位,可以有 8 个优先级;R 一般固定为 0;DP 现固定为 0;8 位的 PF 为报文的代码;8 位的 PS 为目标地址或组扩展;8 位的 SA 为发送此报文的源地址;›接入网络的每一个节点都有名称和地址,名称用于识别节点的功能和进行地址仲裁,地址用于节点的数据通信›每个节点都至少有一种功能,可能会有多个节点具有相同的功能,也可能一个节点具有多个功能
CAN 网络地址分配表:
报文格式:
模式二:电池基本数据+详细数据
BMS : CAN 总线通讯规范(仪表)
1.通讯规范
数据链路层应遵循的原则
总线通讯速率为:250Kbps
数据链路层的规定主要参考 CAN2.0B 和 J1939 的相关规定。
使用 CAN 扩展帧的 29 位标识符并进行了重新定义,以下为 29 标识符的分配表:
其中,优先级为 3 位,可以有 8 个优先级;R 一般固定为 0;DP 现固定为 0;8 位的 PF 为报文的代码;8 位的 PS 为目标地址或组扩展;8 位的 SA 为发送此报文的源地址;›接入网络的每一个节点都有名称和地址,名称用于识别节点的功能和进行地址仲裁,地址用于节点的数据通信›每个节点都至少有一种功能,可能会有多个节点具有相同的功能,也可能一个节点具有多个功能
CAN 网络地址分配表:
CAN 总线结点地址从 J1939 标准中定义的获得;
报文格式:
详细数据方案一:
这里的100ms的周期是指报文3与报文4,报文4与报文5的时间间隔,以此类推。
发送所有320支电池的数据总周期大约为4S
………………
方案二:
确保数据的准确性所以要在每个报文的第一个字节传送一次单体最低电压的电压值。
单体最高电压与单体最低电压差值不能超过1.5V。
…………
温度的100ms时间间隔与前面电压详细数据的时间间隔含义一样,此时的总周期为400ms
模式三:电池基本信息+详细信息+客户可以通过CAN总线设置参数
BMS : CAN 总线通讯规范(仪表)
1.通讯规范
数据链路层应遵循的原则
总线通讯速率为:250Kbps
数据链路层的规定主要参考 CAN2.0B 和 J1939 的相关规定。
使用 CAN 扩展帧的 29 位标识符并进行了重新定义,以下为 29 标识符的分配表:
其中,优先级为 3 位,可以有 8 个优先级;R 一般固定为 0;DP 现固定为 0;8 位的 PF 为报文的代码;8 位的 PS 为目标地址或组扩展;8 位的 SA 为发送此报文的源地址;›接入网络的每一个节点都有名称和地址,名称用于识别节点的功能和进行地址仲裁,地址用于节点的数据通信›每个节点都至少有一种功能,可能会有多个节点具有相同的功能,也可能一个节点具有多个功能
CAN 网络地址分配表:
报文格式:
接收状态
注:若BMS返回的电池总数量正确,并且接收状态相应位置1。
则仪表不再向BMS发送设置参数的报文,直至设置参数有变则再次发送。
详细数据方案一:
这里的100ms的周期是指报文3与报文4,报文4与报文5的时间间隔,以此类推。
发送所有320支电池的数据总周期大约为4S
………………
方案二:
确保数据的准确性所以要在每个报文的第一个字节传送一次单体最低电压的电压值。
单体最高电压与单体最低电压差值不能超过1.5V。
…………
温度的100ms时间间隔与前面电压详细数据的时间间隔含义一样,此时的总周期为400ms。