《机器人技术》教学大纲
《工业机器人技术》课程教学大纲

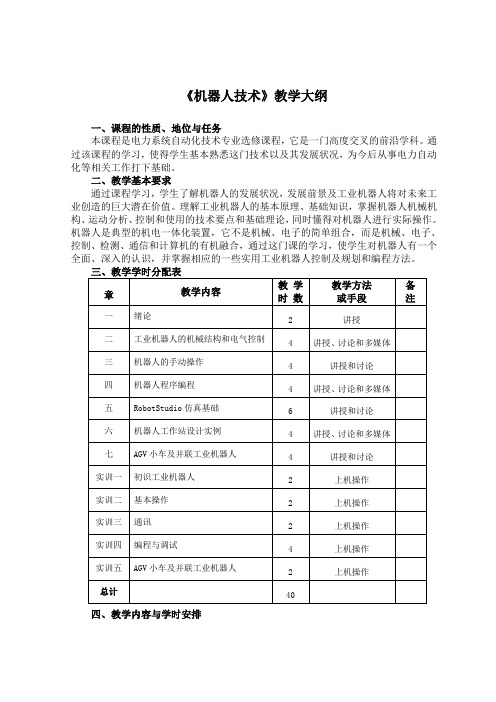
《工业机器人技术》课程教学大纲课程名称:工业机器人技术英文名称:Industry Robot Technology课程编码:学时/学分:18/1课程性质:选修适用专业:机械设计制造及其自动化先修课程:理论力学,机械原理,机械设计,液压传动,自动控制理论一、课程的目的与任务《工业机器人技术》是一门培养学生具有机器人设计和使用方面基础知识的专业选修课,本课程主要研究机器人的结构设计与基本理论。
通过本课程的学习,可使学生掌握工业机器人基本概念、机器人运动学理论、工业机器人机械系统设计、工业机器人控制等方面的知识。
其主要任务是培养学生:1、掌握工业机器人运动系统设计方法,具有进行总体设计的能力;2、掌握工业机器人整体性能、主要部件性能的分析方法;3、掌握工业机器人常用的控制理论与方法,具有进行工业机器人控制系统设计的能力;4、了解工业机器人的新理论,新方法及发展趋向。
二、教学内容及基本要求第一章绪论教学目的和要求:了解工业机器人的发展及现状,结构原理及应用情况。
教学重点和难点:介绍工业机器人的产生和发展过程,掌握机器人的概念、特点、工业机器人的基本分类、工业机器人的应用、工业机器人的组成以及主要性能参数,工业机器人的手部、腕部、臂部、机座的结构原理和实例。
教学方法与手段:课堂教学第一节机器人的分类第二节工业机器人的应用和发展1.2.1 工业机器人的应用1.2.2 工业机器人的发展第三节工业机器人的基本组成及技术参数1.3.1 工业机器人的基本组成1.3.2 工业机器人的技术参数1.3.3 工业机器人的坐标1.3.4 工业机器人的参考坐标系习题第二章工业机器人机构教学目的和要求:本部分介绍常用机器人机构,要求学生掌握常用机器人机构设计形式。
教学重点和难点:主要介绍机器人末端操作器、手腕、手臂及机器人驱动与传动形式。
教学方法与手段:课堂教学第一节机器人末端操作器2.1.1 夹钳式取料手2.1.2 吸附式取料手2.1.3 专用操作器及转换器2.1.4 仿生多指灵巧手2.1.5 其它手第二节机器人手腕2.2.1 手腕的分类2.2.2 手腕的典型结构2.2.3 柔顺手腕结构第三节机器人手臂第四节机器人机座2.4.1 固定式机器人2.4.2 移动式机器人第五节工业机器人的驱动与传动2.5.1 直线驱动机构2.5.2 旋转驱动机构2.5.3 直线驱动和旋转驱动的选用和制动2.5.4 工业机器人的传动2.5.5 新型的驱动方式2.5.6 驱动传动方式的应用习题第三章机器人运动学教学目的和要求:机器人运动学主要研究两个问题:一个是运动学问题,即给定机器人手臂、腕部等各个构件的几何参数及各个关节变量求机器人手部对参考坐标系的位置和姿态;介绍机器人的微移动和微转动概念、两坐标系间的微分运动关系、变换式(方程)中的微分关系、机器人雅可比矩阵的概念、求法——微分变换法;了解逆雅可比矩阵的概念和求解。
机器人基础教学大纲
机器人基础教学大纲机器人基础教学大纲随着科技的不断发展,机器人已经渗透到我们生活的方方面面。
从工业生产到医疗保健,从教育培训到家庭服务,机器人的应用范围越来越广泛。
为了培养未来的机器人工程师和用户,制定一份机器人基础教学大纲至关重要。
本文将探讨机器人基础教学大纲的内容和结构,并提出一些建议。
一、机器人基础知识机器人基础知识是学习机器人的基石。
学生应该了解机器人的定义、分类和发展历程。
他们需要了解机器人的组成部分,包括传感器、执行器、控制系统等。
此外,学生还应该学习机器人的工作原理和基本原则,如感知、决策和执行。
二、机器人编程机器人编程是机器人技术的核心。
学生应该学习编程语言和算法,以实现机器人的自主操作和任务执行。
他们需要学习控制结构和流程控制,了解条件语句和循环语句的应用。
此外,学生还应该学习传感器数据的处理和分析,以实现机器人的感知和决策能力。
三、机器人机械设计机器人机械设计是机器人技术的重要组成部分。
学生应该学习机械设计的基本原理和方法。
他们需要了解机械结构的设计原则和机械零件的选择。
此外,学生还应该学习CAD软件的使用,以进行机械设计和模拟。
四、机器人电子技术机器人电子技术是机器人技术的关键。
学生应该学习电子元件的基本知识和电路设计的原理。
他们需要了解传感器和执行器的工作原理,以及电子电路的组成和功能。
此外,学生还应该学习电路板的设计和制造,以实现机器人的电子控制。
五、机器人应用领域机器人应用领域是机器人技术的广泛应用。
学生应该了解机器人在工业生产、医疗保健、教育培训和家庭服务等领域的应用。
他们需要了解机器人的优势和局限性,以及机器人在不同领域的应用案例。
此外,学生还应该学习机器人的伦理和社会影响,以进行合理的机器人应用和发展。
六、机器人实践项目机器人实践项目是机器人教学的重要环节。
学生应该参与机器人设计和制作的实践项目。
他们需要应用所学的机器人知识和技能,解决实际问题和完成任务。
此外,学生还应该学习团队合作和项目管理,以提高机器人实践项目的效果和质量。
机器人技术教学大纲

机器人技术教学大纲一、引言随着科技的不断发展和进步,机器人技术已经成为当今世界的一个热门领域。
机器人作为现代科技的代表,已经广泛应用于生活和生产的各个领域,对未来社会的发展具有重要意义。
因此,机器人技术的教学也变得至关重要,本文将阐述机器人技术教学的重要性,并提出相应的教学大纲。
二、机器人技术教学的重要性1. 适应社会需求:随着科技的飞速发展,机器人技术在工业、服务业、医疗等领域的应用越来越广泛。
培养机器人技术人才,可以更好地适应社会产业结构的变化和需求的提升。
2. 提升学生技能:机器人技术教学可以激发学生的创新思维和动手能力,培养他们解决实际问题的能力和技能,提升其综合素质。
3. 培养团队合作精神:机器人技术涉及多学科知识,学生需要通过团队合作来完成项目。
这有利于培养学生的团队协作和沟通能力。
三、机器人技术教学大纲1. 课程设置(1)基础知识教学:机器人的基本原理、结构、工作原理等。
(2)机器人编程:学习编程语言,掌握机器人的控制技术。
(3)机器人应用:介绍机器人在各领域的应用,拓展学生的视野。
(4)实践教学:进行机器人组装、编程实践,提升学生动手能力。
2. 教学目标通过机器人技术教学,培养学生的创新意识和实践能力,提高其问题解决和团队合作能力。
同时,引导学生关注社会发展,为未来科技进步做出贡献。
3. 教学方法(1)理论教学:讲解机器人的相关原理和知识,提供必要的理论基础。
(2)实践操作:组织学生进行机器人组装、编程等实际操作,培养其动手能力。
(3)项目实践:引导学生参与机器人项目实践,锻炼其团队合作和问题解决能力。
4. 教学评估(1)课堂表现:评估学生在课堂上的听讲、回答问题和互动表现。
(2)实践成果:评估学生完成的机器人组装、编程作品,并进行评分。
(3)项目表现:评估学生参与机器人项目实践的团队合作和表现,做出综合评价。
四、结语机器人技术作为一种重要的现代科技,对未来社会的发展有着重要的推动作用。
《工业机器人技术基础》课程教学大纲
《工业机器人技术基础》课程教学大纲一、课程地位与作用工业机器人技术是近年来新技术发展的重要领域之一,是以微电子技术为主导的多种新兴技术与机械技术交叉、融合而成的一种综合性的高新技术。
这一技术在工业、农业、国防、医疗卫生、办公自动化及生活服务等众多领域有着越来越多的应用。
工业机器人在提高产品质量、加快产品更新、提高生产效率、促进制造业的柔性化、增强企业和国家的竞争力等诸方面具有举足轻重的地位。
本课程是以工业机器人概述、基本组成及技术参数、本体与控制器连接、末端操作器、工业机器人的环境感觉技术、编程语言介绍、工业机器人系统集成项目流程等为研究对象的一门专业基础课。
二、教学目标学生通过对本课程的学习,熟知工业机器人使用及搬运安全事项;了解工业机器人常见国际品牌与国内品牌;掌握工业机器人的三大组成部分和六个子系统;工业机器人的主要技术参数和常用软件,工业机器人末端操作器种类与应用等,让学生对工业机器人的定义、发展历史及前景、运用领域、基本组成、主要技术参数有一个初步的认识,为后面的专业核心课程打下理论基础,培养学生的学习兴趣,建立长期的学习计划。
同时树立示教器、专用设备、教具使用的安全意识及保养意识,使学生初步具备分析和解决基础技术问题的能力。
三、课程教学内容与方法设计第一章绪论【教学目标】1.掌握工业机器人行业典型应用、市场前景;2.熟知工业机器人品牌认识及行业应用前景;3.熟知使用机器人安全注意事项以及机器人的分类。
【重点难点】1.工业机器人的应用环境;2.工业机器人的使用安全;【教学内容】1.机器人的分类;2.工业机器人的应用环境,工业机器人的历史发展;3.工业机器人家族介绍;4.工业机器人应用安全注意事项。
【教学方法与设计】1.本章主要采用哪些教学方法?通过实际工程案例的讲解来引导知识点的学习和应用。
通过讲授和多媒体教学的方式,并结合板书进行教学,在讲解过程中注重与学生互动。
2.如何组织教学?运用哪些教学手段?在课堂中针对重难点内容不仅要通过多媒体展示,还要进行关键词组的板书。
工业机器人技术基础-教学大纲
工业机器人技术教学大纲课程简介本课程是工业机器人技术专业学生的专业必修课,学生在学完本课程后,能获得具有生产一线技术和运行人员所必须掌握的机器人技术应用的基本知识和基本技能。
工业机器人应用岗位已经成为众多行业特别是电子制造、汽车制造、半导体工业、机械制造、造船工业、机床加工等行业最关键最核心的工作岗位。
本课程介绍了工业机器人的机械结构、驱动系统、控制系统和感觉系统,通过典型案例对工业机器人示教和操作的相关基础共性问题进行详细图解,内容涵盖机器人搬运、码垛、焊接、涂装和装配五大典型应用任务。
通过本课程的学习,学生掌握工业机器人技术的基础知识,为后续的学习打下基础。
课程大纲一、课程的性质与任务:本课程是工业机器人技术专业基础课程,它是集力学、机械学、生物学、人类学、计算机科学与工程、控制论与控制工程学、电子工程学、人工智能、社会学等多学科知识之大成,是一项综合性很强的新技术。
通过该课程的学习,使得学生基本熟悉这门技术以及其发展状况,为今后从事工业机器人技术安装、应用、设计等工作打下基础。
通过课程学习,学生了解机器人的发展状况,发展前景及工业机器人将对未来工业创造的巨大潜在价值。
理解工业机器人的基本原理、基础知识,掌握机器人机械机构、运动分析、控制和使用的技术要点和基础理论,同时懂得对机器人进行实际操作。
机器人是典型的机电一体化装置,它不是机械、电子的简单组合,而是机械、电子、控制、检测、通信和计算机的有机融合,通过这门课的学习,使学生对机器人有一个全面、深入的认识,并掌握相应的一些实用工业机器人控制及规划和编程方法。
二、课程的目的与基本要求:了解机器人的部件、结构、特性、应用技术的现状及发展趋势,机器人的语言系统的作用及内容;掌握机器人的各种分类方式,掌握不同类型机器人的性能,机器人的基本术语、各类图形符号和主要技术参数,机器人的机身、臂部、腕部、手部、行走机构等的结构特点,机器人的驱动方式、驱动机构、传动机构,机器人控制系统及控制方式、基本单元、控制系统的基本组成;掌握搬运、码垛、焊接、涂装和装配五大典型机器人的系统组成及功能;熟悉搬运、码垛、焊接、涂装和装配五大典型机器人作业示教的基本流程。
《机器人学》教学大纲
《机器人学》课程教学大纲、课程基本信息二、课程目标(一)总体目标:机器人学是智能制造工程专业培养计划中一门高度交叉、前沿的重要专业必修课程,融合了运动学/动力学分析、机械学、控制理论与工程、计算机技术、人工智能等多学科内容的综合性新技术应用课程.通过该课程的学习,使学生了解并掌握机器人学相关的基本理论和方法,具有现代机器人系统设计、分析、应用等基本能力和以后从事相关科学研究和技术工作的能力。
本课程针对智能制造工程专业的特点,主要介绍机器人数学基础、工业机器人、服务机播人的基本机械结构设计、运动学与动力学分析,以及机器人传感器和控制技术等基础理论和技术基础知识,并以实际工程应用为背景,安排各类机器人实样参观、专题讲座、实验等内容。
通过本课程教学,不但使学生掌握机器人技术的基本理论知识,使学生对各类机器人技术和开发方法有所了解,同时通过课程设计等活动培养其在逻辑思维、科学研究和设计实践上的能力,从而培养学生综合运用机器人技术解决智能制造领域实际工程问题的能力。
(二)课程目标:课程目标1:学习并掌握现代机器人的基本理论及方法,具有应用机器人解决工程问题的创新意识和能力;(支撑毕业要求1)课程目标2:学习并掌握工业机器人、服务机器人的状态检测和控制技术,具有利用先进控制理论和方法进行机器人控制并完成具体工程应用的能力;(支撑毕业要求2)课程目标3:学习并掌握现代机器人的总体设计、技术设计和详细结构设计及控制系统设计等内容,具有根据实际工程问题设计相应机器人解决方案的能力:(支撑毕业要求3)课程目标4:评定方法包括课后作业(15%)、实验(20%)、项目研究(15%)和期末考试(50%)环节,总评成绩以百分计,满分100分,各考核环节所占分值比例和根据具体情况微调。
2.(三)评分标准通过机器人的实验,获得相关实验设计和实验技能的基本训练,具有应用相关实验方法解决实际工程问题的能力。
(支撑毕业要求5)(三)课程目标与毕业要求、课程内容的对应关系三、教学内容第1章:绪论(3学时)通过本章内容的教学,使学生了解机器人学的起源与发展,讨论机器人学的定义,分析机器人的特点、结构与分类。
机器人 教学大纲
机器人教学大纲机器人教学大纲随着科技的不断发展,机器人已经成为了我们生活中不可或缺的一部分。
无论是在工业生产中的应用,还是在日常生活中的辅助,机器人都扮演着重要的角色。
为了更好地培养和发展机器人领域的人才,制定一份全面而有深度的机器人教学大纲显得尤为重要。
一、机器人概述在机器人教学大纲的开篇,我们需要对机器人进行一个全面的概述。
包括机器人的定义、发展历程、分类等方面的内容。
通过对机器人的概述,学生们可以对机器人有一个整体的认识,为后续的学习奠定基础。
二、机器人技术基础在这一部分,我们将对机器人技术的基础知识进行讲解。
包括机器人的硬件组成、传感器技术、控制技术等方面的内容。
学生们可以通过学习这些基础知识,了解机器人的构造和工作原理,为后续的实践应用打下基础。
三、机器人编程机器人编程是机器人领域中至关重要的一部分。
在这一部分,我们将介绍机器人编程的基本原理和方法。
包括编程语言的选择、编程环境的搭建、算法设计等方面的内容。
通过学习机器人编程,学生们可以掌握如何通过编程来控制机器人的行为,实现各种功能。
四、机器人应用机器人的应用领域广泛,涉及到工业、医疗、农业、教育等多个领域。
在这一部分,我们将介绍机器人在不同领域中的应用案例。
学生们可以通过学习这些案例,了解机器人在实际生活中的应用场景,培养对机器人应用的创新思维。
五、机器人伦理与法律随着机器人技术的不断发展,机器人伦理和法律问题也日益凸显。
在这一部分,我们将对机器人伦理和法律问题进行探讨。
包括机器人与人类关系、机器人的道德责任、机器人法律框架等方面的内容。
通过学习机器人伦理与法律,学生们可以对机器人技术的发展有一个更加全面的认识。
六、机器人创新设计机器人创新设计是机器人教学大纲中的重要一环。
在这一部分,我们将引导学生们进行机器人创新设计的实践。
学生们可以根据自己的兴趣和需求,设计并制作自己的机器人项目。
通过实践,学生们可以将所学知识应用到实际中,培养创新思维和动手能力。
《机器人技术》教学大纲
《机器人技术》教学大纲一、课程的性质、地位与任务本课程是电力系统自动化技术专业选修课程,它是一门高度交叉的前沿学科。
通过该课程的学习,使得学生基本熟悉这门技术以及其发展状况,为今后从事电力自动化等相关工作打下基础。
二、教学基本要求通过课程学习,学生了解机器人的发展状况,发展前景及工业机器人将对未来工业创造的巨大潜在价值。
理解工业机器人的基本原理、基础知识,掌握机器人机械机构、运动分析、控制和使用的技术要点和基础理论,同时懂得对机器人进行实际操作。
机器人是典型的机电一体化装置,它不是机械、电子的简单组合,而是机械、电子、控制、检测、通信和计算机的有机融合,通过这门课的学习,使学生对机器人有一个全面、深入的认识,并掌握相应的一些实用工业机器人控制及规划和编程方法。
四、教学内容与学时安排第一章绪论……2学时本章教学目的和要求:了解工业机器人的发展及现状,结构种类及应用情况。
重点和难点:工业机器人的产生和发展过程,机器人的概念、特点、工业机器人的基本分类、工业机器人的国内外品牌和工业机器人的应用。
第一节工业机器人的发展历史一、机器人的定义第二节工业机器人的分类一、按机器人的结构分类二、按机器人的应用环境分类第三节工业机器人的应用领域第四节工业机器人品牌介绍一、国外工业机器人品牌二、国内工业机器人品牌第五节世界工业机器人发展现状第六节我国机器人在国内生产状况一、国内生产状况二、工业机器人发展趋势第二章工业机器人的机械结构和电气控制……4学时本章教学目的和要求:了解工业机器人的组成,机械结构及机器人的坐标设置及电气控制原理及IO控制端的设置。
并对机器人的减速器和伺服电机做一些介绍。
重点和难点:机械结构及机器人的坐标设置,机器电气控制原理,O控制端的设置。
第一节机械手的结构一、机械手(Manipulator)二、机器人的坐标系三、减速器第二节机器人控制系统一、机器人控制概述二、ABB机器人控制系统三、ABB 机器人的 IO 通信四、ABB 标准 I/O 板第三节系统输入输出与 I/O 信号的关联第四节伺服电机工作原理第五节工机器人传感器第三章机器人的手动操作……4学时本章教学目的和要求:了解ABB机器人的发展,型号及其对机器人的操作注意事项。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《机器人技术》教学大纲
一、课程基本信息
课程代码:050361
课程名称:机器人技术
英文名称:Robot Techniques
课程类别:专业选修课
学时:36
学分: 2
适用对象: 机械电子工程专业(本科)
考核方式:考查
先修课程:《微机原理》,《电工电子学》,《机械设计基础》,《可编程控制器原理》
二、课程简介
机器人学是一门高度交叉的前沿学科,机器人技术是集力学、机械学、生物学、人类学、计算机科学与工程、控制论与控制工程学、电子工程学、人工智能、社会学等多学科知识之大成,是一项综合性很强的新技术。
通过该课程的学习,使得学生基本熟悉这门技术以及其发展状况,为今后从事光机电一体化与系统设计、制造的研究工作打下基础。
Robotics is a new interdiscipline, Robot techniques include mechanics, mechanics, biology, anthropology, computer science, project, cybernetics and controlling engineering, electronic engineering, artificial intelligence, sociology,etc., It is a comprehensive technology. Through studying this course, the students can be familiar with this technology and the development state, and make the foundation in optical, mechanical and electronic integration and research work including system design and manufacture in the future.
三、课程性质与教学目的
本课程是机械电子工程的专业选修课,通过本课程的学习,使学生掌握机器人机构设计、运动分析、控制和使用的技术要点和基础理论。
机器人是典型的机电一体化装置,它不是机械、电子的简单组合,而是机械、电子、控制、检测、通信和计算机的有机融合,通过这门课的学习,使学生对机器人有一个全面、深入的认识。
培养学生综合运用所学基础理论和专业知识进行创新设计的能力。
·
第1章概述
(一)目的与要求
基本要求:让学生了解机器人的发展历史。
(二)教学内容
机器人的发展历史
第2章机器人本体的机械结构
(一)目的与要求
1.基本要求:
1)理解机器人的概念和分类
2)掌握机器人本体的机械结构的组成,机器人的外形结构与运动、机身和臂部机构、驱动机构
3)了解机器人的手部机构、行走机构;理解机器人机械设计的基本要求。
(二)教学内容
1.机器人的概念和分类
2.机器人的外形结构与运动
3.机身和臂部机构
4.驱动机构
5.手部机构
6.机器人的行走机构
7.机器人机械设计的基本要求
第3章驱动方法
(一)目的与要求
1.基本要求:
学习机器人的交流电动机驱动、直流电动机驱动、液压驱动和气压驱动方法;
2.重点、难点
步进电动机驱动是本章的难点。
(二)教学内容
1.液压驱动
2.气压驱动
3.直流电动机驱动
4.步进电动机驱动
5.交流电动机驱动
第4章机器人位置与姿态描述
(一)目的与要求
1.基本要求:
1)理解齐次坐标、齐次变换的概念,学会变换方程的建立方法
2)重点掌握机器人位置与姿态矩阵的定义、几何意义。
(二)教学内容
1.齐次坐标、齐次(H)变换
2.变换方程的建立
3.机器人位置与姿态矩阵
第5章机器人运动学
(一)目的与要求
1.基本要求:
1)重点理解连杆坐标系、连杆参数、机器人连杆坐标系变换矩阵、雅可比矩阵的概念。
2)学会典型机器人的运动学正问题求解方法
3)掌握机器人运动学分析的D-H方法。
4)掌握雅可比矩阵的定义、物理意义、学习矢量积法构造雅可比矩阵的基本原理。
5)了解机器人运动学逆解的基本方法。
2.重点、难点
本章的重点是连杆坐标系和连杆参数、典型机器人运动学正问题解、雅可比矩阵定义、物理意义、矢量积法构造;难点是连杆坐标系和连杆参数、雅可比矩阵定义、物理意义、矢量积法构造
(二)教学内容
1.连杆坐标系和连杆参数
2.机器人连杆坐标系变换矩阵
3.典型机器人运动学正问题解
转动坐标臂(RRR)、斯坦福六自由度机器人、PUMA560六自由度机器人
4.机器人运动学逆解
5.雅可比矩阵定义、物理意义、矢量积法构造
第6章机器人的控制
(一)目的与要求
1.基本要求:
1)学习机器人的控制方式
2)掌握单关节机器人控制建模与控制原理
3)理解多关节机器人的控制原理。
2.重点、难点
本章的重点是单关节机器人控制建模与控制系统。
(二)教学内容
1.概述
2.单关节机器人控制建模与控制系统
3.多关节机器人的控制
4.机器人控制系统的硬件结构及接口
第7章机器人感觉系统
(一)目的与要求
1.基本要求:
了解机器人位置和位移传感器、视觉传感系统、接近觉传感器、触觉传感器、力觉传感器和压觉传感器的基本型式。
(二)教学内容
1.机器人传感器的选择要求
2.位置和位移传感器
3.机器人的视觉传感系统
4.机器人的接近觉传感器
5.机器人的触觉、力觉和压觉传感器
五、各教学环节学时分配
六、推荐教材和教学参考资源
1.教材:
(1)郭洪红,工业机器人技术,西安电子科技大学出版社,2006。
(2)谢存禧、张铁,机器人技术及其应用,机械工业出版社,2005
(3)孟庆鑫,王晓东,机器人技术基础。
哈尔滨工业大学出版社,2006 2.参考书:
(1)孙迪生,王炎编著,机器人控制技术,机械工业出版社,2001
(2)蔡自兴等,机器人学,清华大学出版社,2000年
(3)孙学检,机器人基础,石油大学出版社,1999年
七、需要说明的问题
1.本大纲只适用于机械设计制造及自动化专业
2.本大纲的学时为参考学时,学时如有变化,任课教师可在此大纲的基础上增减一些内容。
3.建议的教材只是编写大纲时的教材,选用教材时要尽量选用新版教材,或最新获奖教材。
4.习题和实验内容着重加深基本概念的理解,基本方法的运用和创新能力的培养,从而巩固课堂教学效果。
修订日期:2007年4月13日
审定日期:2007年4月23日。