总线运动控制
基于CAN总线的网络化运动控制系统的研究
ss m a da bc , a sd c m n a o h r tr t ff lb o t l ytm,n s n d口 yt h rw ak n l e o mu i t n c aa ei i o i d u c nr s a d d i e e s a y ci c s c e s os e e g
e i o r a ieo x rm n s a ert e z n e pe i l e t.
Ke r s M o in c n r l y wo d : to o t o;CANb s Co m u ia in S A1 0 u; m nc t ; J 0 0 o
中 图分类 号 :T 2 文献标 识码 : P7 A
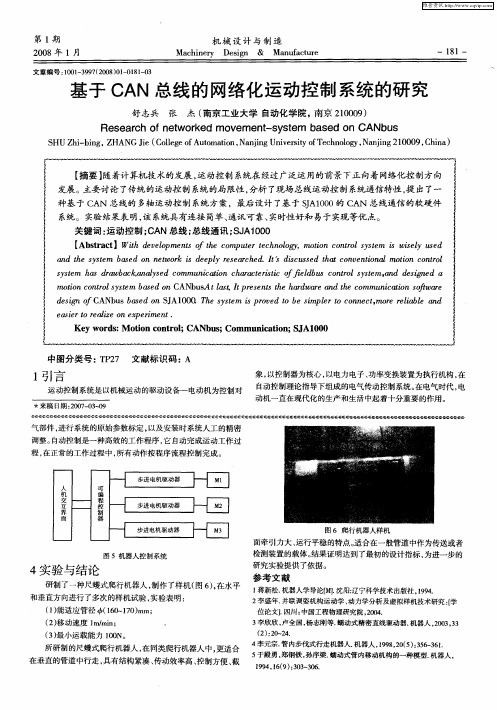
幽 5 机 器人 控 制 系统
检测装置的载体。 结果证 明达到了最初 的设计指标 , 为进一步的 研究实验提供了依据 。
4实验与结论
研制 了一种尺蠖式爬行机器人 , 了样 机( 6 , 制作 图 )在水平
和垂直方向进行 了多次 的样机试验 , 实验表明 :
() 1 能适应管径 西(6 ~ 7 ) m; 10 10 m () 2 移动速度 1 / i ; m r n a () 3 最小运载能力 10 。 0N 所研制 的尺蠖式爬行机器人 , 在同类爬行机器人 中, 更适合 .
基 于 C N总线 的网络化运动控 制 系统的研 究 A
舒 志兵 张 杰 ( 京工 业大 学 自动化 学 院 ,南京 2 0 0 ) 南 109
Re e r h o e wo k d mo e s a c fn t r e v me t s s e b s d o n - y t m a e n CANb s u S h— ig Z N e( o ee f uo t n N ni nvr t o T c n l y N ig 10 9 C ia HUZ ibn , HA GJ C l g A t i , aj gU i s y f eh oo , n 0 0 , hn ) i l o ma o n e i g 2
总线型运动控制系统

总线型运动控制系统传统运动控制系统中常以脉冲和模拟量作为控制信号,并将控制信号发送到电机驱动器中,再由电机驱动器驱动电机运行。
得益于总线技术的发展,运动控制器厂家将总线技术应用运动控制器中。
上位机通过总线将运动参数传送至电机驱动器,再由电机驱动器驱动电机运行。
常见的总线技术有ProfiNet,ProfiBus,EhertCA T,RTEX,CCLINK等等。
总线型运动控制系统相对传统的运动控制系统有诸多优点。
1.接线简化。
在传统运动控制系统中,上位机与电机驱动器通过大量的数字量或者模拟量IO连接,以发送控制信号和接受反馈信号。
这样会使接线数量增加,接线出错的几率比较大,线材成本上升,布线时间长而复杂。
在总线型运动控制系统中,上位机的总线通讯接口可以通过线性拓扑方式连接多个支持总线通讯的电机驱动器。
2.拥有故障自诊断特性。
传统型运动控制系统中的上位机与电机控制器的信息交换是通过有限的IO进行的。
能获取的信息是极有限。
总线型运动控制系统拥有多种诊断功能。
可以实时监控电机的运行状态,实时获取运行状态的信息。
如果电机运行有异常,其相应的电机驱动器可通过总线向上位机发送异常信息。
如线缆短路或短路、接头接触不良,电压异常等物理层诊断。
3.方便调试。
总线型运动控制系统,可以通过上位应用软件监控和调整各电机驱动器节点的参数。
不用通过各电机驱动器的显示面板调整参数。
4.可靠性高传统运动控制系统的中脉冲信号和模拟量信号,容易受到电磁干扰,可导致信号失真。
总线型运动控制系统数字式通讯方式,无信号漂移问题。
总线型运动控制系统应用示例:3S总线控制系统通过EherCAT总线控制7轴运动。
3S 总线系统可以控制多达128个轴,支持复杂插补运算;可控制多达10台不同类型的机器人;提供多达8192点数字量或模拟扩展功能;可接入视觉系统实现定位功能。
基于MODBUS总线伺服电机运动控制方案

基于MODBUS总线伺服电机运动控制方案引言现代工业自动控制系统朝智能化、网络化和开放式结构的方向发展。
利用现场总线技术,将符合同一标准的各种智能设备统一起来,彻底实现整个监测系统的分散控制,将提高系统集成度和数据传输效率、延长有效控制距离,并有利于提高系统抗干扰性能和扩展系统功能。
在运动控制中,伺服电机以其响应速度快,控制精准等优点以被更多的客户所选用。
如果把总线通信与伺服控制技术统一起来,将推动运动控制技术以及设备远程监控技术的发展。
MODBUS作为一种通用的现场总线,已经得到很广泛的应用,很多厂商PLC、智能I/O与A/D模块具备MODBUS通讯接口。
本文在阐述MODBUS通信协议的基础上,构建了基于MODBUS的伺服电机运动控制。
1 MODBUS总线控系统的技术特征MODBUS通讯协议是一种工业现场总线通讯协议,它定义的是一种设备控制器可以识别和使用的信息帧结构,独立于物理层介质,可以承载于多种网络类型中。
MODBUS协议把通信参与者规定为“主站”(Master)和“从站”(Slave),数据和信息的通信遵从主/从模式,当它应用于标准 MODBUS网络时,信息被直接传送。
MODBUS总线网络中的各个智能设备通过异步串行总线连接起来,只允许一个控制器作为主站,其余智能设备作为从站。
采用命令/应答的通信方式,主站发出请求,从站应答请求并送回数据或状态信息,从站不能够自己发送信息。
MODBUS协议定义的各种信息帧格式,描述了主站控制器访问从站设备的过程,规定从站怎样做出应答响应,以及检查和报告传输错误等。
网络中的每个从设备都必须分配给一个唯一的地址,只有符合地址要求的从设备才会响应主设备发出的命令。
由于MODBUS总线系统开发成本低,简单易用,并且现在已有很多工控器、PLC、显示屏等都具有MODBUS 通信接口,所以它已经成为一种公认的通信标准。
通过MODBUS总线,可以很方便地将不同厂商生产的控制设备连成工业网络,进行集中监控。
伺服控制总线方式特点

采用总线控制伺服的优点伺服运动控制采用总线系统解决方案,具有很强的灵活性和很高性价比,与传统方案的优势如下:1、节约布线成本,减少布线时间,减小出错机率。
PLC的一个总线通讯口可以连接多台伺服,伺服之间用简单的RJ45口插接即可,缩短施工周期。
2、信息量更大:全数字信息交互,可以双向传输很多参数、指令和状态等数据;脉冲方式只能单向传送位置或速度信息,无法获取伺服的更多状态或参数。
3、精度高,数字式通讯方式:无信号漂移问题,指令和反馈数据精度可达32-bit4、可靠性更高,抗干扰能力更强,不会出现丢脉冲现象。
脉冲/方向控制在高速脉冲时,会不可靠。
5、降低系统总成本,当超过两台以上伺服时,不用调整PLC配置,而传统方案需要增加脉冲或轴控模块,伺服台数较多时甚至需要改用更高等级的PLC硬件才能满足要求。
6、可开发软件功能更强大的设备,而无需额外硬件或接线:PLC能够实时通过总线监视伺服电机出现的故障,并在HMI上显示出来。
同时PLC还可以监视伺服电机实际位置、实际速度等信息,也可以根据需要由程序自动调整伺服参数。
可实现在HMI 中设定伺服参数,而不用到伺服面板修改,简捷直观不易出错。
7、采用标准的运动功能块库,提高编程调试效率:采用CAN总线系解决统方案,避免了传统脉冲方向控制方式的编程量大、调试复杂等问题,提高了效率,节省了成本和时间。
8、可以实现远距离控制,在生产线设备很长,或伺服数量较多时十分方便、安装成本低。
9、易扩张:当设备有可选轴或后期可能增加轴时十分方便,PLC配置不用增加硬件,接线十分简单。
10、可维护性更强,有更多的状态信息和诊断信息。
数控和运动控制采用总线控制目前在欧美非常流行。
运动控制器型号说明
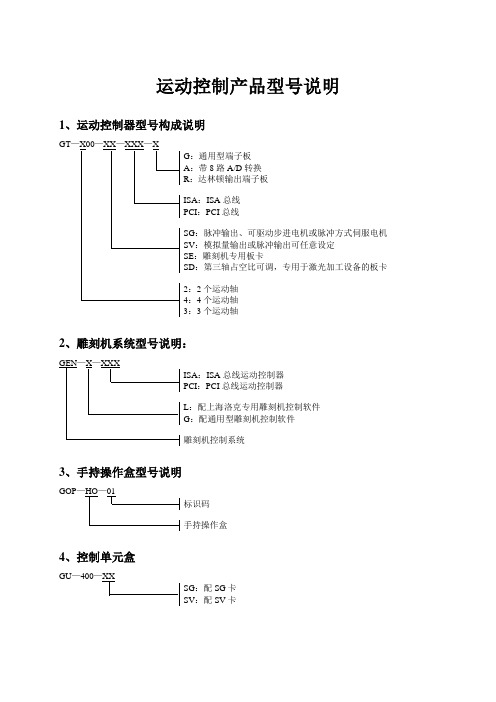
运动控制产品型号说明
1、运动控制器型号构成说明
GT
G:通用型端子板
A:带8路A/D转换
R:达林顿输出端子板
ISA:ISA总线
PCI:PCI总线
SG:脉冲输出、可驱动步进电机或脉冲方式伺服电机
SV:模拟量输出或脉冲输出可任意设定
SE:雕刻机专用板卡
SD:第三轴占空比可调,专用于激光加工设备的板卡
2:2个运动轴
4:4个运动轴
3:3个运动轴
2、雕刻机系统型号说明:
ISA:ISA总线运动控制器
PCI:PCI总线运动控制器
L:配上海洛克专用雕刻机控制软件
G:配通用型雕刻机控制软件
雕刻机控制系统
3、手持操作盒型号说明
GOP
标识码
手持操作盒
4、控制单元盒
GU—400
SG:配SG卡
SV:配SV卡。
基于CAN总线的多电机协调运动控制系统研究
机床 与液压
MAC NE TOOL & HYDRAUL CS HI I
F b2 0 e . 01
Vo . 8 No 3 13 .
第3 8卷 第 3期
D : 0 3 6 /.sn 1 0 OI 1 . 9 9 j i . 0 1—3 8 . 0 0 0 . 2 s 8 12 1. 30 4
P a t a e ut h w t e t c nc lp a tr f hs c n rls se me ttc n lg e u r me t . rc i lrs l s o h e h i a a mee s o i o t y tm e e h oo y r q i c s r t o e ns
Ab t a t sr c :Mu t mo o t n c n r ls se s u e r n r d l n i d s il ae . I S i o tn o i r vn y - l — trmoi o t y t m i s d mo e a d mo e wi ey i n u t a ra i o o r t mp r tt mp o i g s n ’ a e r n z d a c r c f l — tr moin c n r ls se h o ie c u a y o t moo t o to y t m. T e sr cu e o l — tr moi n c n r ls se w s p o o e a e n mu i o h tu t r fmu t moo t o t y tm a r p s d b s d o i o o
Kewo d : Mut moo t nc nrlsse ; C u ; SAI0 y rs l— trmoi o to y tm i o AN b s J O 0
EtherCAT总线在伺服运动控制系统中的应用

D P芯片组 成 , 由此构 建了一主一从的 EIrA S 并 teC T网络结构。研究结果表明 : l 该技术可实现 系统 的实时信号传输和精确位置控制 。 关键词 : D N Eh rA ;T 10 数字信号处理 ; A X C C;te T E 10 ; C 伺服 系统
中图分类号 :P 9T 9 T 2 ;H3 文献标志码 : A 文章编号 :0 14 5 (0 1 1一 3 6 0 10 — 5 12 1 )1 l3 - 3
过 R4 J5接 口连接 EhrA teC T网络 , 通 过 P Ie co 并 D l t se r
选择通过何种接 口 ( 位或 l 位并行接 口、P 接 口、 8 6 SI SI 口) S接 和应用程序控制器相连 , 在该系统 中本研 究 选 用 S I接 口 方 式 与 D P 控 制 器 连 接 。 P S
第 1 期 1
李春木 , :teC T总线在伺服运 动控制系统中的应用 等 Eh rA
・ 3 7・ 13
11 系统硬件 构成 .
该 系 统 的主站 设 备选 用 具有 普通 R4 J5网 络接 口
的P C机 。从 站选用 B chf ( 国倍福 )公 司 的 eko 德 E 90 L 80开发 板和 泰瑞公 司 的 T S 2F 82D P芯 M 30 2 1 S 片, L 80 E 90 可用 于开发 EhrA t C T网络从站设备提供 e 的从 站 接 口板 , 以 E 10 片作为 从 站控 制器 , 它 T 10芯 通
b m yD n m c ( i e ) o , t.T es v t i a o s t yE h r A a ec n o e T 0 a ddgt i a po e s g yA o y a i X a n C . Ld. h a es t nw s n i e b teC T s v o t l r 1 0 n i a s n l rc si s m l ao c sd l rl E 1 il g n
CAN总线在高速液压多缸同步运动控制中的应用

CAN总线在高速液压多缸同步运动控制中的应用严景常李晓明(浙江理工大学浙江省现代纺织装备技术重点实验室,浙江杭州310018)摘要:高速液压多缸同步运动装置有瞬时大功率的特点,其高速液压缸要求达到24m/s的速度,需要采集的数据量大,控制算法也较复杂,所以选用分布式的控制系统。
大量的信号在系统中需实时交换,传统线束已不能满足要求,所以用CAN总线来完成测控中的数据传送。
CAN总线有易扩充、易实现多主结构、可靠性高、实时性强、通信介质无特殊要求的特点。
设计了总体结构,具体的方案,对针对本系统自己定义的CAN应用层协议进行说明。
实践证明,该系统成本低,运行稳定。
关键字:CAN总线;应用层协议;数据;高速液压系统多缸同步运动装置中图分类号:TP273.5;TH137文献标识码:A文章编号:1008-0813(2008)02-0035-04ControlSystemofSynchronousMotionofHighSpeedHydraulicMulti-cylinderBasedonCANBusYANJing-chang,LIXiao-ming(ZhejiangProvincialKeyLaboratoryofModernTextileMachineryTechnology,ZhejiangSci-TechUniversity,Hangzhou310018,China)Abstract:Thespeedofarapidhydrauliccylinderinthefacilityofsynchronousmotionofhighspeedhydraulicmulti-cylindermustreach24m/s.Tremendousdatacollectionisrequiredandcontrolalgorithmiscomplex.Soadistributedcontrolsystemisused.Itisneces-saryforthecontrolsystemtoexchangethesignalsinreal-time.ThetraditionalwiringcannotsatisfythequestsandCANbusisusedtobedatatransfertunnel.CANbushasmanymerits,forexample,flexible,multihostconfiguration,goodreal-time,highreliability,andnospecialmedium.Theunitarystructureandadetailedsolutionisdesigned.TheCANapplication-layerprotocolforthesystemisde-scribed.Thepracticeshowsthesystemislowcostandhasrunstably.KeyWords:CANbus;CANapplication-layerprotocol;data;thefacilityofsynchronousmotionofhighspeedhydraulicmulti-cylinder0引言弹射装置在航空航天领域应用很广泛,如舰载飞机的弹射,从空间站发射发射卫星及无人飞机等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
总线运动控制
总线运动控制技术是一种集成的控制系统,用于控制机器运动的速度和位置。
它的总线结构能够更好地管理机器的运动控制,使得机器能够实现高速、高精度、高稳定性的操作。
在机器加工行业中,总线运动控制技术被广泛应用于汽车行业、机械制造业和机器视觉应用等领域中。
总线运动控制的主要原理是利用总线结构来控制机器的运动和
位置,通过分布式控制来实现机器的高速精度控制。
它主要是由控制器、传感器、运动控制器和机械设备4部分组成,控制器是总线运动控制系统的控制中心,它收集传感器采集的数据,根据运动控制器的设定,控制机械设备的运动。
传感器主要用于检测机器的运动状态,例如检测机器的速度、位置等,传感器采集的数据将被控制器处理,然后发送给运动控制器,运动控制器根据控制器设定的运动参数,指令机械设备实现指定的运动。
总线运动控制系统具有更高的速度和更精确的位置控制精度,使得机器可以达到更高的加工效率。
它具有百分精度、操作便捷性等优点,被应用于汽车行业的数控机床和机械机床,以及机器视觉等领域,有利于提高机器的工作性能。
此外,总线运动控制技术还具有降低系统价格和维护的特征,可以有效地降低机器的加工费用,减少系统安装和维护的工作量。
此外,总线运动控制系统的控制界面简单易操作,生产环境中可以快速有效地操作机器。
总线运动控制技术是一种很好的控制系统,使机器能够达到更高的速度、精度和性能。
它具有的优势使得它在机器加工行业中广泛应用,有助于提高机器的质量、速度和效率,有助于企业的发展。