第11章 轮系习题答案
机械原理轮系习题参考答案

一、解:(1)判断方向,蜗杆左旋用左手右旋用右手,四指握向蜗杆转动方向,拇指指向的反方向即为涡轮转向。
由此逆向判断图中蜗杆、涡轮和齿轮旋转方向如图中箭头所示。
手柄转向如图所示。
4001
601836186056341265432116=××=••=••=z z z z z z w w w w w w i 二、解:该轮系为周转轮系,由反转法对整个轮系加一个反向旋转角速度H w −,
由于齿轮4为定齿轮,角速度为零,即04=w ,所以H H i i 14
11−=; 又有 2.2)1(3423123
14−=•••−=z z z z z z i H
所以 2.32.211=+=H i
三、解:此轮系中假设轮1的方向向下,则行星轮2、2'和太阳轮4的转向都是
向下。
行星轮2、2'和行星架的角速度相同 在左边行星轮系中,1
3
1H 130z z H H −=−−=ωωωω 在右边行星轮系中,'2
444'2z z H ==ωωωω ∴4114ωω=i ==+4'2131z z z z z 25416
四、解:该轮系可以分为两部分,如图中虚线所分的左右两部分,左边为周转轮系,右边为定轴轮系;
分别求出两个轮系的传动比如下:
周转轮系:=H i 1414
1556601441===++z z n n n n H H ; 定轴轮系:7
63530566556====z z n n i ; 两轮系的关系是:
45n n =; 联立方程组求得min 9.741r n ≈; 转向与齿轮6转向相反。
第11章-轮系习题答案

一、填空题:1.轮系可以分为:定轴轮系和 周转轮系 。
2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系;周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。
3.周转轮系的组成部分包括: 太阳轮 、 行星轮 和 行星架 。
4.行星轮系具有 1个自由度,差动轮系有 2自由度。
5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。
6、确定行星轮系中各轮齿数的条件包括:传动比条件、同心条件、均布条件、邻接条件。
7、正号机构和负号机构分别是指:转化轮系的传动比H 1n i 为正号或者负号的周转轮系。
动力传动中多采用 负号 机构。
二、分析计算题 1、在图示的车床变速箱中,移动三联齿轮a 使3’和4’啮合。
双移动双联齿轮b 使齿轮5’和6’啮合。
已知各轮的齿数为z 1=42,582=z ,38'3=z ,42'4=z ,48'5=z ,48'6=z 电动机的转速为n 1=1445r/min ,求带轮转速的大小和方向。
解:3858483842484258'5'31'6'426116-=⨯⨯⨯⨯=-==z z z z z z n n i min /9466r n -=(与电动机转动方向相反)2、在图示的轮系中,已知各轮齿数为20z z z z z 65321=====, 已知齿轮1、4、5、7为同轴线,试求该轮系的传动比17i 。
(1)z z z z z 41231225520100=++==⨯=z z z z 75612332060=+==⨯=(2)iz z z z zz z z z z17323467123561=-()=-⨯⨯=-100602020153、在图示轮系中,已知:蜗杆为单头且右旋,转速n11440= r/min,转动方向如图示,其余各轮齿数为:402=z,20'2=z,303=z,18'3=z,544=z,试:(1)说明轮系属于何种类型;(2)计算齿轮4得转速n4;(3)在图中标出齿轮4的转动方向。
机械原理与机械零件活页练习11解答

一、单选题 11-1 所谓定轴轮系,是指轮系中 。 A.各齿轮的轴都是固定不动的 B.各齿轮的轴线都是固定不动的 C.各齿轮都是固定不动的 D.至少一个齿轮的轴线是固定不动的
练习十一 轮系
11-2 所谓周转轮系,是指轮系中 。 A.各齿轮的轴线均相对某一固定轴线作运动 B.各齿轮的轴线均绕着某一固定轴线作回转运动 C.至少有一个齿轮的轴线相对其他齿轮的固定轴 线作运动 D.至少有一个齿轮的轴线绕着其他齿轮的固定轴 线作回转运动
练习十一 轮系
2)按要求填表
序号
变速传动路线
Ⅱ轴转速nⅡ的计算过程
Ⅱ轴转向
(用图中的符号表示) (直接代入输入转速和齿数) (填箭头)
1档 (快进)
Ⅰ—A—B—Ⅱ
nⅡ=nⅠ=1872r/min
↑
2档 (中进)
Ⅰ—1—2—3—4—Ⅱ
nⅡ= 1872 19 31 1116r / min 38 26
H与3同向
z1 =20, z2 =24 z2‘ = 30,z3 = 40 n1 =200r/min n3 =100r/min
练习十一 轮系
3)求图b所示轮系的nH。
i1H3
n1 nH n3 nH
z2z3 z1z2
200 nH 24 40 8 100 nH 20 30 5 nH 66.67r / min
练习十一 轮系
3)依据轮系传动比通式,
求出传动比i14和n4。 4)哪个齿轮是惰轮?其作用
是什么?
i14
n1 n4
z2 z3z4 z1 z2 z3
60 45 135 30 30 45
9
机械原理课后答案第十一章作业

11-5 图a 、 b所示为两个不同结构的圆锥齿轮周转轮系,已知z1=20, z2=24,z2′=30,z3=40,n1=200r/min,n3= -100r/min。求两轮系 nH= ?(下面给出了计算结果,请检查所列算式、计算结果、 转向的判断是否正确,若正确请打“√”。)
2)图b: n1 n H H =i13 = n3 nH
√
z2 z3 = - 1.6 z 1 z 2
nH = (i13 H n3- n1) / (i13 H - 1)
= [- 1.6×(-100) -200] / (- 1.6 - 1) = 15.385 r/min
√
根据上述计算结果,请回答下列问题
n 1 n H - z2 z4 z6 z7 = z1 z3 z5 z6 n7 nH
39 39 152 == - 44.44 17 17 18
n7 = 0, n1=1450r/min
nH = 31.91 (r/min) (H的转向与 1的转向相同)
11-11 图示的复合轮系,已知n1=3549r/min,各轮齿数为 z1=36,z2=6 z3 =23, z4= 49, z 4′= 69, z5=31,z6=131,z7=94,z8=36, z9=167,试求行星架H的转速nH(大小及转向)。 解:1)分清轮系 定轴轮系:1—2—3—4 行星轮系:4 ′—5—6(7) 行星轮系:7—8—9(H) 2)分别列出各轮系的传动比计算式 i14= n1 /n4 =z2z4 /z1z3 =3.551(转向如图) z 6 = -1.899 7 = n 4 n 7 = - z 5 i 4 6 0 n 7 3)写出联接关系式 z 4 z 5 n4= n4′ z 8 z 9 = -1.777 H = n7 nH = i 79 0 n H - z z 4)联立求解 7 8 nH = 124.15(r/min) ( H的转向与轮4相同)
机械原理答案第十一章 齿轮系及其设计

第十一章 齿轮系及其设计题11-1如图所示为一手摇提升装置,其中各轮齿数均已知,试求传动比i 15,并指出当提升重物时手柄的转向(在图中用箭头标出)。
解: 此轮系为空间定轴轮系78.5771811520524030504321543215=⨯⨯⨯⨯⨯⨯=='''z z z z z z z z i题11-2如图所示为一滚齿机工作台传动机构,工作台与涡轮5固联。
若已知z 1=z 1′=15,z 2=35,z 4′=1(右旋),z 5=40,滚刀z 6=1(左旋),z 7=28。
今要切制一个齿数z 5′=64的齿轮,应如何选配挂轮组的齿数z 2′、z 3和z 4。
解:由范成原理,滚刀6与轮坯5’的角速度比应为64655656==='''z z i ωω 转向如图。
这一角速度比由滚齿机工作台的传动系统来保证。
56242442175421155011528403515''''''=⨯=⨯⨯⨯⨯⨯==i z z z z z z z z z z z z i 转向如图可求得253252=z z 至于Z 3为惰轮,其齿数可根据中心距A 24的需要确定。
题11-3 如图所示为一千分表的示意图。
己知各轮齿数如图,模数mm m 11.0=(为非标准模数)。
若要测量杆1每移动mm 001.0时,指针尖端刚好移动一个刻度()mm s 5.1=。
问指针的长度?=R (图中齿轮5和游丝的作用是使各工作齿轮始终保持单侧接触,以消除齿轮间隙对测量精度的影响) 解:()4332-'-组成定轴轮系1001160120121632431224=⨯⨯===''z z z z i ϕϕ24100ϕϕ=∴再由轮2与测量杆组成齿轮与齿条传动知 测杆1每移动mm 001.0时,齿轮2的转角为:42221027.611.029001.022-⨯=⨯⨯===m Z h r h ϕ 此时要求指针刚好移动一刻度()mm s 5.1=,由4ϕR s =可得指针的长度为mm s sR 241027.61005.1100424=⨯⨯===-ϕϕ题11-4 如图所示为绕线机的计数器。
机械设计第十一章课后习题答案
总是指向其转动中心;圆向力 的方向与其运动方向相反。
图 11.3 题11-8解图 11-9解 ( 1)要使中间轴上两齿轮的轴向力方向相反,则低速级 斜齿轮3的螺旋经方向应与齿轮2的 旋向同为左旋,斜齿轮4的旋向应与齿轮3的旋向相反,为右旋。
( 2)由题图可知:
、、
、
、
分度圆直径
,
查教材表 11-4
,并将许用应用降低30%
故
( 2)其弯曲强度设计公式:
其中:小齿轮转矩
载荷系数 查教材表11-3得
取齿宽系数
齿数
,取
齿数比
齿形系数 查教材图 11-9得
、
因
故将
代入设计公式
因此 取模数
中心距
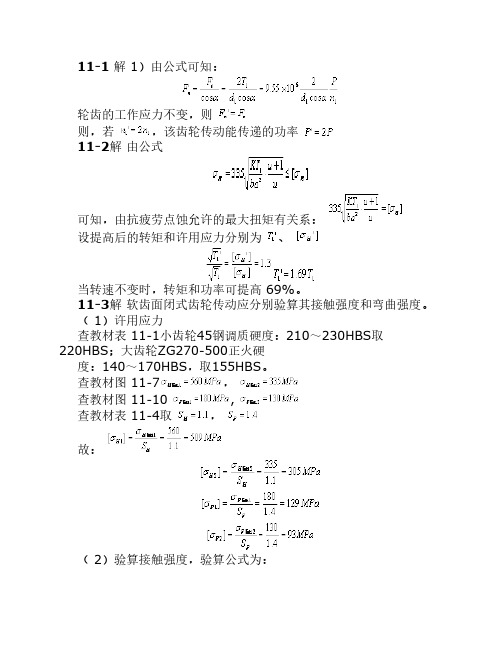
齿宽 11-5解 硬齿面闭式齿轮传动的主要失效形式是折断,设计方法是 按弯曲强度设计,并验算其齿面接触 强度。 ( 1)许用弯曲应力 查教材表 11-1,大小齿轮材料40Cr 表面淬火硬度:52~ 56HRC,取54HRC。查教材图11-10得
11-1 解 1)由公式可知:
轮齿的工作应力不变,则
则,若
,该齿轮传动能传递的功率
11-2解 由公式
可知,由抗疲劳点蚀允许的最大扭矩有关系: 设提高后的转矩和许用应力分别为 、
当转速不变时,转矩和功率可提高 69%。
11-3解 软齿面闭式齿轮传动应分别验算其接触强度和弯曲强度。
( 1)许用应力
查教材表 11-1小齿轮45钢调质硬度:210~230HBS取
,查材料图11-7得
。查教材表11-4
, 因齿轮传动是双向工作,弯曲应力为对称循环,应将极限值乘
70%。
故 ( 2)按弯曲强度设计,设计公式:
轮系习题答案
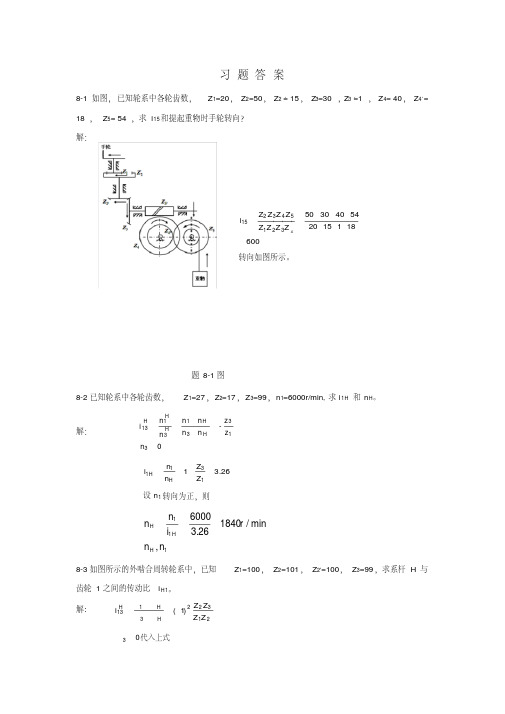
n1 转向为正,则
50 nH 0 nH
30 80 20 50
nH 14.7r / min 与 n1 转向相同,方向的判定如图所示。
8-5 如图为标准圆柱直齿轮传动系统,已知 Z1=60 , Z2=20, Z2‘=25 ,各轮模数相等,求:
1) Z3;
2)若已知 n3=200r/min, n 1=50r/min, n3,n1转向如图,求系杆 H转速大小和方向;
解: i ⅠⅡ= i 4H
在周转轮系中:
n1 nH
Z3
n3 nH
Z1
n1' n H n3 ' n H
Z3
3
Z1
在定轴轮系中:
n1' Z 4 n 4 Z 1'
3
n1'
n4 4
n3'
Z4
n3'
3 n4
n4
Z 3'
4
i4H i
n4 nH
8 3
8-10 已知 Z1=12, Z2=51 , Z3=76 , Z4=49, Z5=12 ,Z6=73,求此混合轮系传动比
3)当 n1 方向相反时,以 -50r/min 代入,则
50 nH 200 nH
20 15 60 25
nH 8.33r / min
nH 8.33r / min 转向与 n1 一致
8-6 图示轮系中,已知各轮齿数为 Z 1=60 , Z2=20 , Z2‘=20 , Z3=20 , Z4=20 , Z5=100,试求
题 8-1 图
8-2 已知轮系中各轮齿数, Z1=27 , Z2=17 , Z3=99, n1=6000r/min, 求 i 1H 和 nH。
第11章 轮系习题答案

5’-6-6’-7(8)组成差动轮系
(2)
(3)
关联: (4)
联立解以上方程得到
也就是说,当齿轮7转动一圈时,齿轮8要反方向专动22.27圈,二者的方向相反。
解:1、2为定轴轮系
方向。
2'、3、3'、4、B为周转轮系。
, 。
转向同 。
10、在图示的复合轮系中,设已知n1=3549r/min,又各轮齿数为z1=36,z2=60,z3=23,z4=49,z4’=69,z6=131,z7=94,z8=36,z9=167,试求行星架H的转速 (大小及转向)?
解:转向用画箭头的方法表示
一、填空题:
1.轮系可以分为:定轴轮系和周转轮系。
2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系;
周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。
3.周转轮系的组成部分包括:太阳轮、行星轮和行星架 。
4.行星轮系具有1个自由度,差动轮系有2自由度。
5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。
(1)说明轮系属于何种类型;
(2)计算齿轮4得转速 ;
(3)在图中标出齿轮4的
(3) 方向←。
4、如图所示为一手摇提升装置,其中各轮齿数均已知,试求传动比 ,并指出当提升重物时手柄的转向(从左往右看时的转向)
解:方向判断用画箭头的方法完成,从左往右看时的转向为逆时针方向。
6、在图示自动化照明灯具的传动装置中,已知输入轴的转速n1=19.5r/min,各齿轮的齿数为z1=60,z2=z3=30,z4=z5=40,z6=120,求箱体B的转速nB。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、填空题:1.轮系可以分为:定轴轮系和 周转轮系 。
2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系;周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。
3.周转轮系的组成部分包括: 太阳轮 、 行星轮 和 行星架 。
4.行星轮系具有 1个自由度,差动轮系有 2自由度。
5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。
6、确定行星轮系中各轮齿数的条件包括:传动比条件、同心条件、均布条件、邻接条件。
7、正号机构和负号机构分别是指:转化轮系的传动比H 1n i 为正号或者负号的周转轮系。
动力传动中多采用 负号 机构。
二、分析计算题 1、在图示的车床变速箱中,移动三联齿轮a 使3’和4’啮合。
双移动双联齿轮b 使齿轮5’和6’啮合。
已知各轮的齿数为z 1=42,582=z ,38'3=z ,42'4=z ,48'5=z ,48'6=z 电动机的转速为n 1=1445r/min ,求带轮转速的大小和方向。
解:3858483842484258'5'31'6'426116-=⨯⨯⨯⨯=-==z z z z z z n n i min /9466r n -=(与电动机转动方向相反)2、在图示的轮系中,已知各轮齿数为20z z z z z 65321=====, 已知齿轮1、4、5、7为同轴线,试求该轮系的传动比17i 。
(1)z z z z z 41231225520100=++==⨯=z z z z 75612332060=+==⨯=(2)iz z z z zz z z z z17323467123561=-()=-⨯⨯=-100602020153、在图示轮系中,已知:蜗杆为单头且右旋,转速n11440= r/min,转动方向如图示,其余各轮齿数为:402=z,20'2=z,303=z,18'3=z,544=z,试:(1)说明轮系属于何种类型;(2)计算齿轮4得转速n4;(3)在图中标出齿轮4的转动方向。
(1)定轴轮系(2)nz z z nz z z412312341201840305414408=⋅⋅⋅⋅⋅=⨯⨯⨯⨯⨯=''r/min(3)n4方向←。
4、如图所示为一手摇提升装置,其中各轮齿数均已知,试求传动比15i,并指出当提升重物时手柄的转向(从左往右看时的转向)解:方向判断用画箭头的方法完成,从左往右看时的转向为逆时针方向。
2345115''5123420304052'2015118577.7z z z znin z z z z⨯⨯⨯===⨯⨯⨯=5、在图示周转轮系中,已知各齿轮的齿数60,20,25,153'221====z z z z ,齿轮1的转速m in /2001r n =,齿轮3的转速m in /503r n =,其转向相反。
(1) 求行星架H 的转速n H 的大小和方向; (2) 当轮3固定不动时,求n H 的大小和方向。
解 ⑴图示为一差动轮系。
其转化机构的传动比为520156025'21323113-=⨯⨯-=⨯⨯-=--=z z z z n n n n i H H H设齿轮1的转速为正值,则齿轮3的转速为负值,将已知值代入得min /33.86506)50(52006531r n n n H -=-=-+=+=转向与齿轮3的转向相同。
(2)当轮3固定不动时,Hi i 13131-==6,H n =33.3r/min ,方向与n 1的方向相同6、在图示自动化照明灯具的传动装置中,已知输入轴的转速n 1=19.5r/min ,各齿轮的齿数为z 1=60,z 2=z 3=30,z 4=z 5=40,z 6=120,求箱体B 的转速n B 。
解:将该传动装置反转(B n -),转化后的轮系为定轴轮系,其传动比为:23060120305316426116-=⨯⨯-=⨯⨯⨯⨯-=--=z z z z z z n n n n i B B B31161=-=BB i i所以,m in /5.6r n B =,方向与n 1的方向相同7、已知轮系中,20,15,60'221===z z z 各轮模数均相等,求H i z 13及。
解⑴图示为一行星轮系。
⑵由同心条件得()()'232122z z m z z m-=- 所以651520602'213=-+=-+=z z z z⑶0,3'21323113==--=n z z zz n n n n i H H H1631613120606515111'2132131=-=⨯⨯-=-=-=z z z z i i HH 8、在图示轮系中,各齿轮均是模数相等的标准齿轮,并已知,22,3421==z z 184=z ,886=z 。
试求齿数3z 及5z ,并计算传动比AB i 。
解:根据同心条件:78222342213=⨯+=+=z z z1-2-3-4组成行星轮系(4为系杆)21324341413z z zz n n n n i -=--=2941.311213241314=+=-=z z z z i i 4-5-6-B 组成行星轮系0,6466446=-=--=n z zn n n n i B B B8889.518/1061146464==+=-=z z i i BB 3987.1944=⨯=B A AB i i i (A 和B 的转向一致)9、在图示轮系中,单头右旋蜗杆1的回转方向如图,各轮齿数分别为372=z ,15'2 =z ,253=z ,20'3 =z ,604=z ,蜗杆1的转速14501=n r/min,方向如图。
试求轴B 的转速n B 的大小及方向(标明从右往左看时的旋向)。
解:1、2为定轴轮系n n z z n n 12212137137=== 方向↑。
2'、3、3'、4、B 为周转轮系。
3 243B 4B 2B4 2z z zz n n n n i -=--=3 24321z z z z n n B +=, n n 22'=。
r/min 53.643 3 23 2B =+=z z z z z z n 转向同n 2'↑。
10、在图示的复合轮系中,设已知n 1=3549r/min ,又各轮齿数为z 1=36,z 2=60,z 3=23,z 4=49,z 4’=69,z 6=131,z 7=94,z 8=36,z 9=167,试求行星架H 的转速H n (大小及转向)?解:转向用画箭头的方法表示1-2-3-4组成定轴轮系55.331424114===z z z z n n i 4’-5-6-7组成行星轮系(7为行星架)0,6'46767'4764'=-=--=n z zn n n n i8986.2'114676'47'4=+=-=z z i i 7-8-9-H 组成行星轮系0,9799779=-=--=n z zn n n n i H H H=+=-==79797711z z i n n i HH H 2.7766 571.28747141=⨯⨯=H H i i i i ,min /2.12411r i n n HH ==行星架转动方向与齿轮4的回转方向相同11、在图示双螺旋桨飞机的减速器中,已知18,30,20,265421====z z z z ,及1n =15000r/min ,试求Q P n n 和的大小和方向。
(提示:先根据同心,求得3z 和6z 后再求解。
)解:根据同心条件:66202262213=⨯+=+=z z z 66182205246=⨯+=+=z z z4-5-6-Q 组成行星轮系 Q Q Q Qi z z n n n n i 44664461-=-=--=(1) 1-2-3-P 组成行星轮系 P pp Pi z z n n n n i 11331131-=-=--=(2) 轮系之间的关联:4P n n =(3)323.11.4141==Q Q i i i ,min /737.1324r n Q =(与n 1同向)5385.311314=-=Pi i ,m in /4329r n P =(与n 1同向)12、如图所示轮系,已知25'21==z z ,100=H z ,20432===z z z 。
求传动比41i 。
解 (1)图示为一复合轮系。
(2)1-2-2’-3-H 组成行星轮系,其传动比为H H H Hi z z zz n n n n i 1'213231131-=⨯⨯=--=()25925252020111'213221=⨯⨯-=⨯⨯--=z z z z i H(3)由齿轮4和行星架H 组成定轴轮系,5110020444-=-=-==H H H z z n n i (4)125951259414114-=⎪⎭⎫ ⎝⎛-⨯=•==H H i i n n i41i =9125-齿轮1和齿轮4的转向相反。
13、在图示轮系中,已知各轮齿数分别为381=z ,,202=z ,18z '14==z 19'4=z ,38z 5=,88' 5=z ,,336=z 36'6=z ,907=z ,188=z 。
试问:齿轮7转一圈,齿轮8转多少圈?两者转向是否相同?2-1-1’-3-4-4’-5组成定轴轮系519191820381838'43'1254315225-=⨯⨯⨯⨯-=-==z z z z z z z z n n i (1) 5’-6-6’-7(8)组成差动轮系163'6 '586H 8H '5H 8'5-=-=--=z z z z n n n n i (2)1615'6 '576H 7H '5H 7'5==--=z z z z n n n n i (3)关联:25'5,n n n n H == (4)联立解以上方程得到584.29n n -= 5732.1n n = 7827.22n n -=也就是说,当齿轮7转动一圈时,齿轮8要反方向专动22.27圈,二者的方向相反。