六自由度摇摆台动力学建模与分析_谢国庆
六自由度摇摆台设计过程
六自由度摇摆台设计过程设计六自由度摇摆台是一个复杂而精密的过程,需要考虑多个因素,包括力学原理、控制系统、传感器和运动学等。
下面将详细介绍六自由度摇摆台的设计过程。
第一步:确定需求和目标在设计六自由度摇摆台之前,首先需要明确该摇摆台的使用目标和需求。
例如,是用于研究人体运动,还是用于模拟船舶或飞机的运动情况。
根据需求,可以确定所需的最大摆角、最大加速度等参数。
第二步:力学原理分析第三步:设计运动平台运动平台是摇摆台的关键组成部分,它承载着摇摆台的运动。
在设计运动平台时,需要考虑其稳定性、刚度和质量等因素。
为了实现六自由度的运动,可以采用多个电机和传动装置,通过控制电机的转速和转向来实现运动。
第四步:设计支架和传动装置支架和传动装置是用于支撑和传递力的关键部件。
支架的设计要考虑到摇摆台的整体稳定性和强度要求,需要选择合适的材料和结构,并进行力学计算和模拟分析。
传动装置的设计要考虑到摇摆台的运动精度和可靠性要求。
第五步:选择传感器和控制系统为了实现六自由度的运动控制,需要使用传感器来检测运动台的位置和姿态,并将数据反馈给控制系统。
常用的传感器包括陀螺仪、加速度计和光电编码器。
控制系统根据传感器信号进行数据处理和控制指令的发出,以实现摇摆台的精确控制。
第六步:进行仿真和验证在设计完成后,需要进行仿真和验证来验证设计的可行性和性能是否满足要求。
可以使用计算机辅助设计软件进行仿真,并根据仿真结果进行优化和改进。
此外,还需要进行实验验证,通过实验数据和结果来评估摇摆台的性能和稳定性。
第七步:制造和装配最后一步是将设计的摇摆台进行制造和装配。
根据设计图纸,选择合适的材料和加工工艺,制作各个部件,并进行试装和调试。
在装配过程中,要注意各个部件的配合和校准,确保摇摆台的运动平稳和精确。
综上所述,设计六自由度摇摆台是一个复杂而精密的过程。
需要考虑力学原理、控制系统、传感器、运动学和结构设计等多个方面因素。
通过系统地进行需求分析、力学分析、运动设计、仿真验证和装配调试等步骤,可以设计出满足要求的高精度六自由度摇摆台。
采用Matlab的六自由度机器人三维运动学仿真
采用Matlab的六自由度机器人三维运动学仿真李庆;谢一首;郑力新;张裕坤;庄礼鸿【摘要】对SA1400型六自由度工业机器人进行三维的运动学建模与仿真,建立机器人的正逆运动学方程,并得到正逆解。
为验证方程及所求解的正确性,首先,使用Solidworks 建立机器人各个部件三维模型;然后,用Matlab将所求得的正逆解编写为程序,导入机器人各部件,利用 Matlab 的三维绘图功能,以显示机器人的三维模型,并对机器人按轨迹运动的过程进行动态仿真,记录运动过程中机器人各关节角度值的变化,提示求解得到的不合理角度值和奇异点。
结果表明:仿真过程较真实地模拟了实际机器人的运动情况,仿真结果达到预期目标,证明根据正逆运动学方程求得的解的准确性和可行性。
%For the 3D kinematics modeling and simulation of SA1400 six degrees of freedom industrial robot,the robot kinematics equations are established and forward and inverse solutions are got.In order to verify the correctness of the e-quations and solutions.Firstly,solidworks is used to build 3D model of robot components.Then,forward and inverse solutions are programmed using Matlab,and models of robot components are imported.The 3D graphics functions of Matlab is used to display the 3D model of the robot,and do dynamic simulation of robot trajectory movement,while re-cording the change in the angle of each joint of robot during the simulation and suggesting irrational angle values and sin-gular points.The results show that the process factually simulates the actual movement of the robot.The simulation re-sults achieve the expected goal,and prove the accuracy andfeasibility of solutions obtained from forward and inverse kine-matics equations .【期刊名称】《华侨大学学报(自然科学版)》【年(卷),期】2016(037)003【总页数】5页(P299-303)【关键词】三维仿真;工业机器人;六自由度;运动学;Matlab【作者】李庆;谢一首;郑力新;张裕坤;庄礼鸿【作者单位】华侨大学工业智能化技术与系统福建省高校工程研究中心,福建泉州 362021;华侨大学工业智能化技术与系统福建省高校工程研究中心,福建泉州362021;华侨大学工业智能化技术与系统福建省高校工程研究中心,福建泉州362021;华侨大学工业智能化技术与系统福建省高校工程研究中心,福建泉州362021;华侨大学工业智能化技术与系统福建省高校工程研究中心,福建泉州362021【正文语种】中文【中图分类】TP391.9机器人是“智能制造”这一主题下最受关注的领域之一.虽然中国已成为世界第一的机器人大国,但国产机器人的水平与国外相差较大,关键技术和零部件仍依赖进口,精度、稳定性和寿命不如国外生产的机器人,应用也主要集中于沿海地区的汽车和电子制造业.此外,我国机器人产业还存在“产、学、研”脱节的问题,机器人制造企业很难通过有效渠道获得与掌握研究机构及高校的最新成果.在机器人研究中,仿真是非常重要的环节,正确、合理的仿真可以减少实体机器人运行过程中的各种问题.本文采用Matlab对六自由度机器人进行三维运动学仿真.机器人运动学实现由机器人关节变量组成的关节空间与笛卡尔空间之间的相互转换.运动学的研究包含2个方面:一是正运动学,由机器人各关节角度计算机器人末端的位置与姿态;二是逆运动学,由末端的位置与姿态求解机器人在此位姿的各关节角度[1].SA1400型机器人的结构图与D-H坐标系,如图1所示.相邻连杆n-1与n之间的D-H坐标系变换矩阵[2-3]为各连杆的D-H参数,如表1所示.表1中:θn为关节n的旋转角度,即两连杆夹角,符合右手定则为正;dn为关节n的偏距,即两连杆距离;αn为关节n和n-1轴线之间的夹角,即连杆扭角,符合右手定则为正;an为关节n和n-1轴线之间的公法线距离,即连杆长度,n=1,2,3,…,6[4];θ为关节角度范围;vmax为最大关节速度.由表1可得各变换矩阵为式中:Sn=sin θn,Cn=cos θn,下同.因此,末端执行器的位姿方程为.机器人运动学逆解的方法主要分为封闭解法和数值解法,封闭解法又分为代数解法和几何解法.封闭解法计算速度快、效率高,便于实时控制,而数值解法求解速度较慢,所以常用封闭解法求解.大多数工业机器人都可以应用Pieper准则,以简化逆解的运算[5-7].逆解方程为1) 令式(1)左右两边矩阵的(3,4)元素(表示矩阵的第3行第4列,下同)相等,可得S1(px-d6ax)+C1(py-d6ay)=0.则有2) 令式(1)左右两边(2,4)和(1,4)元素分别相等,并化简为a3S3-d4C3=-C2u+S2v.式中:u=a1+C1(axd6-px)+S1(py-ayd6),v=azd6+d1.将式(2a),(2b)两边平方相加,令,可得C2v+S2u=w,则有).3) 式(2)中,式(2a)×d4-式(2b)×a3,式(2a)×a3+式(2b)×d4,可得式中:m=-a2-vC2-uC2,n=-uC2+vS2,则有θ3=ATAN2 (S3,C3).4) 令式(1)左右两边(2,3)与(1,3)元素分别相等,可得C3C4S5-C3C5=C1C2ax-S1C2ay-S2az.由式(3a)×S3-式(3b)×C3,可得则有θ5=ATAN2 (S5,C5).5) 令式(1)左右两边(3,3)元素相等,可得则有θ4=ATAN2 (S4,C4).6) 令式(1)左右两边(3,2)相等元素,可得JC6-KS6=-C4.式中:J=oxS1+oyC1,K=nxS1+nyC1,则对于多解问题,首先,应根据关节运动范围对所求得的解进行取舍,然后,按照以下2种方法得到各关节的解.一是先求得多组关节角,再用“最短行程”得到一组最优解[2,8];二是先求得θ1的多个解,再计算所求解与θ1当前角度值的欧氏距离,取其小者作为θ1的最优解,用此解求θ2,再利用欧氏距离求取θ2的最优解,其余关节角依此类推[9].最终可获得控制机器人实现目标位姿的1组最优关节角,2种最优解的取值方法,如图2所示.为了验证所求解方程的准确性和可行性,使用Solidworks建立机器人的三维模型,并在Matlab中进行运动学仿真[10-11].仿真流程,如图3所示.1) 螺旋线轨迹.螺旋线的轴心线垂直于基座标系(底座坐标系)的xy平面,在xy平面内的坐标为(1 200,0),z坐标范围为0~720 mm,螺旋线半径为100 mm.机器人末端在按轨迹运动的过程中,其轴线z6始终竖直向下,从下往上运动.在仿真中,为整段螺旋线轨迹选定了720个关键点,即高度每增加1 mm,机器人末端到达1个新的位姿.螺旋线轨迹仿真过程三维动画截图与末端轨迹曲线,如图4所示.由图4可知:理论轨迹和实际轨迹重合,说明文中正逆解方程是正确的.运动过程中各关节的角度值(θn),如图5所示.由图5可知:在运动过程中,各关节角度值连续变化,且都在表1所列的关节角度范围内,说明文中所解方程是可行的,具有实用性.2) 球面轨迹.球心坐标为(900,-200,900),半径为100 mm,球面轨迹是由半径不同的螺旋线组成.机器人末端在按轨迹运动的过程中,其轴线z6始终指向球心,从上往下运动.球面轨迹的关键点数为1 088个.球面轨迹仿真过程三维动画截图与末端轨迹曲线,如图6所示.图6中:机器人正在走球面的底部轨迹,点云为机器人的实际轨迹.由图6可知:箭头所指处的理论轨迹和实际轨迹中不重合,这是因为机器人在此处走球面轨迹和其末端轴线z6始终指向球心,不能同时完成,即运动奇异点,方程解得的关节5的角度值超出表1中的角度范围(-115°~115°),所以程序采用关节5上一时刻的角度值,导致实际轨迹出现偏差.运动过程中各关节的角度值,如图7所示.由图7可知:运动过程中各关节角度值连续变化,且都在表1的关节角度范围内.对SA1400型机器人进行仿真,使机器人分别按螺旋线轨迹和球面轨迹运动,并对运动过程进行分析.实时的三维动态显示使仿真过程更加直观,关节角度值变化曲线图有利于对仿真过程进行分析.仿真结果证明文中所求得的解是正确、可行的,且文中的方法与思想也适用于其他关节型机器人.【相关文献】[1] 韩建海.工业机器人[M].3版.武汉:华中科技大学出版社,2015:60-86.[2] 王其军,杜建军.MOTOMAN机器人逆运动学新分析[J].哈尔滨工业大学学报,2010,42(3):451-454.[3] 王雪松,许世范,郝继飞.MOTOMAN机械手逆运动方程新的推导方法及求解[J].中国矿业大学学报,2001,30(1):73-76.[4] 蔡自兴.机器人学[M].2版.北京:清华大学出版社,2009:34-52.[5] PAUL R,SHIMANO B,MAYER G.Differential kinematic control equations for simple manipulators[J].IEEE Trans SMC,1981,11(6):449-455.[6] PIEPER D,ROTH B.The kinematics of manipulaor under computercontrol[J].Proceeding of the Second International Congress on Theory of Machines and Mechanisms,1969,2:159-169.[7] JOHN J C.机器人学导论[M].3版.贠超,译.北京:机械工业出版社,2014:48-105.[8] 崔建国,宋爱国,黄惟一.遥操作系统中MOTOMAN-SV3机器人的运动建模研究[J].东南大学学报(自然科学版),2003,33(4):424-429.[9] 叶上高,刘电霆.机器人运动学逆解及奇异和多解的处理[J].机床与液压,2014,42(3):27-29.[10] 罗家佳,胡国清.基于Matlab的机器人运动仿真研究[J].厦门大学学报(自然科学版),2005,44(5):640-644.[11] 臧庆凯,李春贵,闫向磊.基于MATLAB的PUMA560机器人运动仿真研究[J].广西科学院学报,2010,26(4):397-400.。
六自由度摇摆台动力学建模与分析
2 0 1 5 年1 月
溢体秸动与 控蠡 哇
ui d Po we r Tr a ns mi s s i o n a nd Co n t r o l
No . 1 ( S e r i a l No . 6 8 )
J a n, . 201 5
供 了基础 。 关键词 : 六 自由度摇摆 台 ; 动力学 ; 牛顿 欧拉法 ; 建模分析
中图分类号 : T P 2 0 3 文献标志码 : A 文章 编 号 : 1 6 7 2 . 8 9 0 4 一 { 2 0 1 5 ) 0 1 - 0 0 2 9 — 0 0 3
六 自由度 摇 摆 台 是 德 国人 S t e wa r t t ” 提 出 的 一 种 六 自 由度 并 联 机 构 , 由于 它 较 串联 机 构 具 有 高 刚度 ,
液压缸沿轴线方 向的受力情况 。该部分的建模与分 析是 确 定 系统 工作 压力 、 液 压缸 有 效工 作 面积 和伺 服
阀规 格 的基 础 , 是 摇 摆 台结构 参 数 优 化 、 机 械 设计 、 液压 动 力机 构设 计及 控制 系统 设计 的主要依 据 之一 。 对 于 多刚 体 系统 , 常 用 的动力 学 建模 方法 有 牛顿 欧拉法 、 拉 格 朗 日法 、 虚 功 原理 、 凯 恩方 法 等 , 其 中 牛
六 自由度摇摆 台动力学建模 与分析
谢 国庆 艾艳辉 郭欣欣
( 中船 重工第 7 1 0 研究所 湖北宜 昌 4 4 3 0 0 3) 摘 要: 根据六 自由度摇 摆台的机构学原理 , 采用牛顿 欧拉 法建立了摇摆 台的系统动 力学模型 , 完 成了动力学的建模
与分析 , 然后运用 Ma t l a b 软件对上述动力学模型进行 编程计算 , 最后运用所 建立 的动力学模型对实际摇摆 台各液压缸 的出力进行 了仿 真 , 得 到了运动平台以不同姿态运动 时各液压缸 的受力情况 , 为摇摆台的结构参数优化及动态分析提
《2024年新型六自由度运动模拟器的性能分析与设计》范文

《新型六自由度运动模拟器的性能分析与设计》篇一一、引言随着科技的不断进步,模拟器技术在众多领域得到了广泛的应用。
其中,六自由度(6DOF)运动模拟器作为一种高级的模拟系统,在军事、航天、汽车、医疗等多个领域发挥着重要作用。
本文将针对新型六自由度运动模拟器的性能进行分析,并探讨其设计思路和方法。
二、六自由度运动模拟器概述六自由度运动模拟器是一种能够模拟三维空间中六个方向上运动特性的设备,包括沿X、Y、Z轴的平移以及绕这三个轴的旋转运动。
它能够模拟各种复杂环境下的运动状态,为实验和训练提供逼真的体验。
三、新型六自由度运动模拟器的性能分析(一)高精度运动控制新型六自由度运动模拟器采用先进的控制系统和传感器技术,能够实现高精度的运动控制。
通过精确的算法和反馈机制,模拟器能够准确模拟各种复杂环境下的运动状态,提高实验和训练的准确性。
(二)大范围运动空间新型六自由度运动模拟器具有较大的运动空间,能够满足不同场景下的模拟需求。
通过优化机械结构和控制系统,模拟器能够在较大的空间范围内实现精确的运动控制。
(三)高稳定性与可靠性新型六自由度运动模拟器采用高强度材料和先进的制造工艺,具有较高的稳定性和可靠性。
同时,通过优化设计和严格的测试流程,确保模拟器在长时间运行过程中能够保持优良的性能。
(四)易于集成与维护新型六自由度运动模拟器具有良好的集成性和维护性。
通过采用模块化设计,方便用户进行安装、调试和维修。
同时,提供友好的用户界面和丰富的接口,方便与其他系统的集成。
四、新型六自由度运动模拟器的设计思路与方法(一)需求分析在进行新型六自由度运动模拟器的设计之前,首先要进行需求分析。
明确模拟器的应用场景、使用人群、所需功能等关键要素,为后续的设计提供依据。
(二)总体设计根据需求分析结果,进行总体设计。
确定模拟器的结构形式、机械布局、控制系统等关键要素。
同时,考虑模块化设计,方便后续的安装、调试和维护。
(三)硬件设计硬件设计是新型六自由度运动模拟器设计的关键环节。
船舶六自由度操纵-摇荡耦合运动的数学建模与分析
1
船舶运动坐标系
为了定量描述船舶的操纵运动和摇荡运动,建立
ห้องสมุดไป่ตู้
0
引 言
船舶在航行过程中会产生 6 个方向的自由度。这
动和摇荡运动分开建模分析,其研究成果不能真实表 现船舶的实时运动状态 [2] 。在研究操纵运动时,假设 船舶在静水条件下航行,通过操控方向舵使船舶运动 来研究其响应特性。在研究摇荡运动时,假设船舶在 风浪中直线匀速运动时,研究船舶对风浪的响应性 能。在实际航行过程中,静水环境和匀速直线运动难 以保证,因此将操纵运动和摇荡运动分开研究具有局 限性。将操纵运动和摇荡运动相耦合再进行分析,才 能真实地反映船舶运动情况。 船舶的运动分析模型大致可分为水动力模型和基 于运动响应模型。水动力模型以动力学定律为基础, 建立船舶运动状态和船舶作用力的关系模型。基于运 动响应模型通过实验获取操纵性能和船舶运动状态之
映船舶的实际运动状态。针对这一问题,本文建立了六自由度的船舶操纵 -摇荡耦合运动的数学模型。建立了 2 种船 舶运动坐标系,并推导 2 种坐标系之间的转化关系。此外,在设计船舶运动仿真计算流程的基础上,利用 MMG 分 离模型分别建立船体、螺旋桨、舵的动力学数学模型,将波浪中的操纵运动和摇荡运动结合起来。
收稿日期 : 2017 – 08 – 22 作者简介 : 乐志峰 (1980 – ) ,男,硕士,讲师,研究方向为计算数学。
第 39 卷
乐志峰:船舶六自由度操纵 -摇荡耦合运动的数学建模与分析
· 11 ·
间的关系,再根据这种关系建立运动模型。本文主要 通过建立水动力模型来分析操纵 -摇荡耦合运动。
第 39 卷 第 10A 期 2017 年 10 月
舰 船 科 学 技 术 SHIP SCIENCE AND TECHNOLOGY
《2024年六自由度机械臂控制系统设计与运动学仿真》范文
《六自由度机械臂控制系统设计与运动学仿真》篇一一、引言随着工业自动化和智能制造的快速发展,六自由度(6-DOF)机械臂因其灵活性和高效性,在工业生产、医疗、军事等领域得到了广泛应用。
本文旨在设计一个六自由度机械臂控制系统,并对其运动学进行仿真分析。
二、六自由度机械臂控制系统设计1. 硬件设计六自由度机械臂控制系统主要由机械臂本体、驱动系统、控制系统和传感器系统等组成。
其中,机械臂本体采用模块化设计,包括基座、大臂、小臂和末端执行器等部分。
驱动系统采用伺服电机和减速器,以提供足够的动力和精度。
控制系统采用高性能的微处理器,实现对机械臂的精确控制。
传感器系统包括位置传感器、力传感器等,以实现对机械臂状态和环境信息的实时感知。
2. 软件设计软件设计包括控制算法和程序设计两部分。
控制算法采用经典的控制策略,如PID控制、模糊控制等,实现对机械臂的精确控制。
程序设计采用模块化设计思想,便于后续的维护和升级。
此外,为了提高系统的鲁棒性和自适应能力,我们采用基于机器视觉的算法,实现机械臂的自主导航和定位。
三、运动学仿真运动学仿真是对六自由度机械臂进行性能评估的重要手段。
本文采用MATLAB软件进行运动学仿真。
1. D-H参数法建模首先,我们采用Denavit-Hartenberg(D-H)参数法对机械臂进行建模。
通过建立连杆坐标系,确定各连杆之间的相对位置和姿态,从而得到机械臂的运动学方程。
2. 正运动学仿真正运动学仿真是指根据关节角度计算末端执行器的位置和姿态。
我们通过MATLAB中的机器人工具箱,输入各关节的角度值,得到末端执行器的位置和姿态。
通过对比仿真结果和实际结果,验证了正运动学模型的正确性。
3. 逆运动学仿真逆运动学仿真是指根据末端执行器的位置和姿态,计算关节角度。
我们通过MATLAB中的优化工具,对逆运动学方程进行求解,得到各关节的角度值。
通过对比不同优化算法的求解结果,选择最优的求解方法。
四、实验与结果分析为了验证六自由度机械臂控制系统的性能,我们进行了实际实验和仿真实验。
《2024年新型六自由度运动模拟器的性能分析与设计》范文
《新型六自由度运动模拟器的性能分析与设计》篇一一、引言随着科技的不断进步,六自由度(6-DOF)运动模拟器在众多领域中扮演着越来越重要的角色。
它不仅在军事模拟训练、航空航天、机器人技术等领域得到广泛应用,而且在娱乐、体育以及教育领域也展现出了巨大的潜力。
本文旨在深入分析新型六自由度运动模拟器的性能与设计,以期为相关研究与应用提供参考。
二、新型六自由度运动模拟器概述新型六自由度运动模拟器是一种能够模拟三维空间中六个方向上运动状态的设备。
这六个方向包括沿X、Y、Z轴的平移运动以及绕这三个轴的旋转运动。
该模拟器通过高精度的传感器和控制系统,实现对运动状态的实时监测与控制,从而为使用者提供沉浸式的体验。
三、性能分析(一)精度与稳定性新型六自由度运动模拟器采用先进的传感器技术和高精度的控制系统,实现了高精度的运动模拟。
其误差范围极小,能够满足各种应用场景的需求。
同时,该模拟器具有很高的稳定性,能够在长时间运行过程中保持精确的运动状态。
(二)实时性与响应速度该模拟器具有极高的实时性和响应速度。
传感器能够实时监测运动状态,控制系统能够迅速作出反应,使模拟器在短时间内达到目标状态。
这种快速响应的能力使得模拟器在各种应用中都能表现出色。
(三)多功能性新型六自由度运动模拟器具有很高的多功能性。
通过更换不同的附件和软件,可以实现多种不同的应用,如军事模拟训练、航空航天模拟、机器人技术测试、娱乐游戏等。
这使得该模拟器具有很高的灵活性和适用性。
四、设计(一)硬件设计新型六自由度运动模拟器的硬件设计主要包括传感器、执行机构和控制单元。
传感器用于实时监测运动状态,执行机构负责实现运动,控制单元则负责整个系统的控制和协调。
硬件设计需要考虑到精度、稳定性、实时性以及耐用性等因素。
(二)软件设计软件设计是新型六自由度运动模拟器的关键部分。
软件需要实现对传感器数据的处理、控制算法的实现以及与执行机构的通信等功能。
同时,软件还需要具备友好的人机交互界面,以便用户能够方便地使用和操作模拟器。
六自由度工业机械臂动力学建模及仿真
θ6
x5 xn
z5zn
量。
6 1
EV = i1 2 mi
VCiO
T VCiO
(4)
3.3 机械臂势能求解
机械臂构件的势能只与各构件质心在竖直方向上的分量有 关。势能的计算公式如式(5)所示。其中 gO = [ 0 -9.8 0 0 ];
L1
J1
z0 θ1 y0
EP,i = -mi gO CiO
VCiO
xCi
yCi
T zCi
(3)
各关节转角分别为 θ(i i=1, 2,…6)。
机械臂平动动能求解如式(4)所示,其中 mi 为各构件的质
z2 θ 3
O3 a3
O2 x3
J 3
x2 y2
L2 y1
a1
J2
O1
z1 θ
2
x1
y3
θ4
z3yθJ4x45 4 z4
J5
y O 4 O5 5
yn
J6
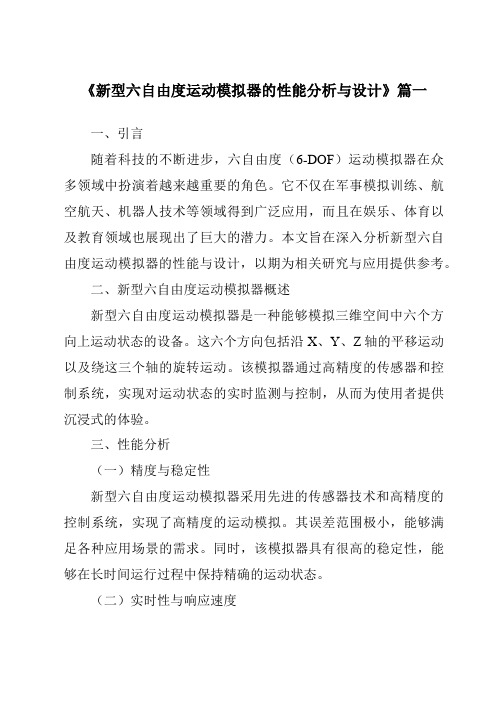
2019.25 科学技术创新 - 39 -
六自由度工业机械臂动力学建模及仿真
李梦飞 (襄阳汽车职业技术学院 汽车工程学院,湖北 襄阳 441021)
摘 要:为了研究六自由度工业机械臂的动力学特性,基于拉格朗日方程建立机械臂的动力学理论和仿真模型。分别建立各
个构件的转动动能、平动动能和势能方程,进而得到各个构件的拉格朗日因子,通过虚拟样机模型测量对应构件的拉格朗日因子
希望能够为 KJ2000N 安全监控系统高效运行奠定良好基础。
关键词:KJ2000N 安全监控系统;瓦斯监控;防范措施;分析
中图分类号院TD713
文献标识码院A
文章编号院2096-4390渊2019冤25-0040-02
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2015 年第 1 期
和主矩应满足:
{Pc + Fg = 0
Mc + Mt = 0
(5)
即:
{DeP + Q + Fg = 0
HP + Mt = 0
(6)
为写成动力学方程的标准形式,可将式(6)写成:
éêDeùú ëH û
P
+
éQ ù ëêM1ûú
+
é0 êëM2
F0eùûú·q·= 0
[ 式中,·q·为系统质心的角加速度,·q·= ag
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
建模与分析[J]. 机械科学与技术,2006,25(4):382-385. [4] 赵强. 运动模拟器并联六自由度平台的理论和运用[M].
哈尔滨:东北林业大学出版社,2009. [5] 赵慧, 韩俊伟, 张尚盈等. 六自由度并联机器人动力学分
析 和 计 算 [J]. 济 南 大 学 学 报 ( 自 然 科 学 版),2003,17(2):
Xie Guoqing Ai Yanhui Guo Xinxin
Abstract: Based on the machine principle of the 6-DOF platform, the dynamics model and analysis are completed by Newton-Euler method. Then a programmed calculation is made by using the Matlab software for the above dynamic model. Eventually, the dynamic model is applied to an actual platform, and the forces are computed, which act on the actuators caused by the motion of the platform. The simulation results provide the basis for the structure parameters optimization and the dynamic analysis of the platform. Key words: 6-DOF; dynamics; Newton-Euler method; modeling analysis
(7)
]ε1 T ;
M1
= (Jωt)×
ω t
-
J
·
E
·
q t
;
M2 = -JE ;
Fe = -(m + M )ag × diag(1,1,1) 。
则可求出液压缸的驱动力矢量 P 为:
··
P=Uq +V
(8)
式中,U
为广义质量矩阵,U =
-
éD
ê
ëH
ù-1
eú
û
é0 ëêM
2
F0eùûú ;
V 为与机构广义力及哥氏离心力有关的矩阵;
欢迎订阅 欢迎投稿
������������������������������������
������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
114-117. [6] 徐勇. 六自由度转台控制策略及三维动画仿真研究[D].
哈尔滨:哈尔滨工业大学,2001. [7] 周跃发. 多自由度船舶摇摆模拟台研究[D]. 哈尔滨:哈尔
滨船舶工程学院,1988.
Dynamic Modeling and Analysis of 6-DOF Platform
参考文献
[1] D. Stewart. A Platform with Six Degrees of Freedom. Proc.
Inst. Mech. Eng. 1965,180(3):371-386. [2] 徐鹏,王代华. Simulink 环境下的 Stewart 平台的动力学仿
真[J]. 仪器仪表学报,2004,25(4):118-122. [3] 黄其涛,韩俊伟,何景峰. 六自由度并联运动平台动力学
动力学分析用于包括动力学指标的结构参数优 化设计、控制系统设计以及运动仿真等,分正逆两类 问题[4]。本文对动力学逆问题进行研究,即已知运动 平台的运动路径和其上各点的速度、加速度,求解各 液压缸沿轴线方向的受力情况。该部分的建模与分 析是确定系统工作压力、液压缸有效工作面积和伺服 阀规格的基础[5],是摇摆台结构参数优化、机械设计、 液压动力机构设计及控制系统设计的主要依据之一。
对于多刚体系统,常用的动力学建模方法有牛顿 欧拉法、拉格朗日法、虚功原理、凯恩方法等,其中牛 顿欧拉法的物理意义直观、运算量小、计算效率高,所 以本文采用牛顿欧拉法建立六自由度摇摆台的系统 动力学模型,然后运用 Matlab 编程对摇摆台的各缸受 力进行了仿真分析和计算。
1 六自由度摇摆台动力学模型的建立
综合考虑当平台位移和速度同时达到最大以及 平台的速度和加速度同时达到最大的情况,即可得到 液压缸的最大出力,根据该最大出力可以确定液压源
2015 年 1 月
谢国庆,等:六自由度摇摆台动力学建模与分析
压力和液压缸的有效工作面积等。
第 31 页
3# 2#
6#
1#、3#、5# 2#、4#、6#
1# 5#
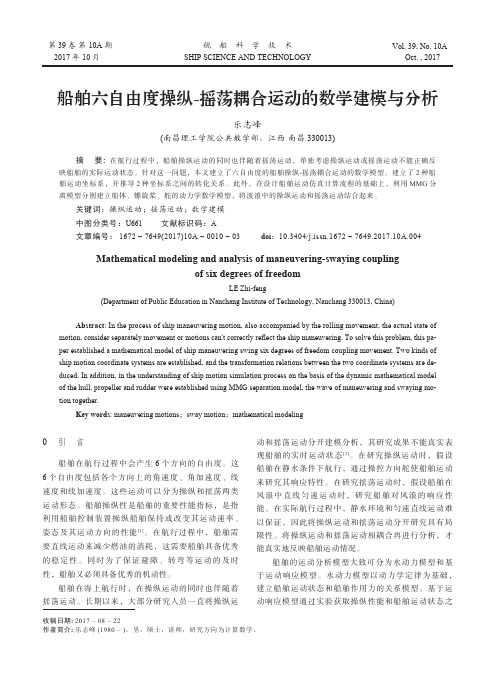
由于篇幅的限制,这里只给出了使平台位移和速 度同时达到最大设计值运动时的各液压缸的的受力 情况。运动平台在几种典型姿态运动下各液压缸的 受力情况如图 2 至图 4 所示。
图中横轴为时间,纵轴为各液压缸所受的力,曲 线上的编号表示液压缸号,从图中可以看出当运动平 台以不同的姿态运动时各液压缸的受力情况。
4#
图 4 绕 Z 轴以 25∘sin(1.5 t) 规律旋转
图 2 绕 x 轴以 25∘sin(1.5 t) 规律旋转
1#、6#
3#、4#
2#、5#
图 3 绕 y 轴以 25∘sin(1.5 t) 规律旋转
3 结语
本文采用牛顿欧拉法建立了六自由度摇摆台系 统的动力学模型,对某一实际的摇摆台参数运用 Matlab 编程计算求得平台以不同姿态运动时各液压缸的 受力情况,为摇摆台的系统设计和优化提供了基础。
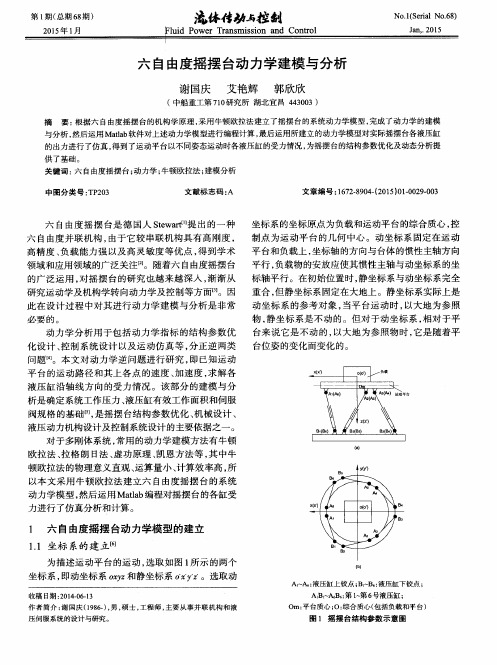
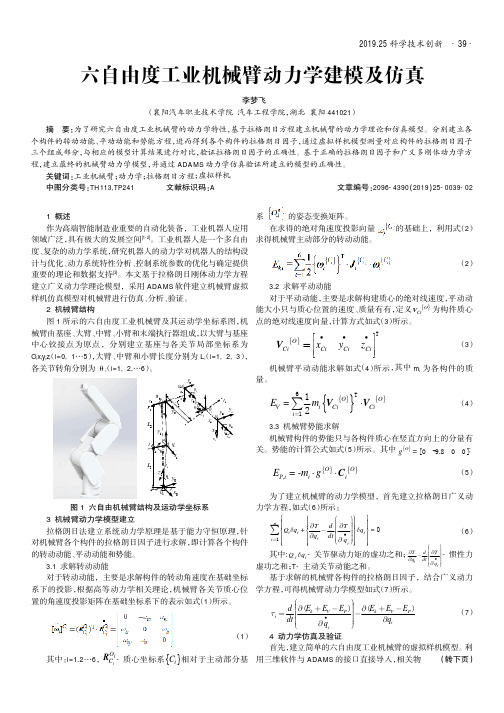
1.1 坐标系的建立[6]
为描述运动平台的运动,选取如图 1 所示的两个 坐标系,即动坐标系 oxyz 和静坐标系 o, x, y, z, 。选取动
收稿日期:2014-06-13 作者简介:谢国庆(1986-),男,硕士,工程师,主要从事并联机构和液 压伺服系统的设计与研究。
坐标系的坐标原点为负载和运动平台的综合质心,控 制点为运动平台的几何中心。动坐标系固定在运动 平台和负载上,坐标轴的方向与台体的惯性主轴方向 平行,负载物的安放应使其惯性主轴与动坐标系的坐 标轴平行。在初始位置时,静坐标系与动坐标系完全 重合,但静坐标系固定在大地上。静坐标系实际上是 动坐标系的参考对象,当平台运动时,以大地为参照 物,静坐标系是不动的。但对于动坐标系,相对于平 台来说它是不动的,以大地为参照物时,它是随着平 台位姿的变化而变化的。
中图分类号:TP203
文献标志码:A
文章编号:1672-8904-(2015)01-0029-003
六自由度摇摆台是德国人 Stewart[1]提出的一种 六自由度并联机构,由于它较串联机构具有高刚度, 高精度、负载能力强以及高灵敏度等优点,得到学术 领域和应用领域的广泛关注[2]。随着六自由度摇摆台 的广泛运用,对摇摆台的研究也越来越深入,渐渐从 研究运动学及机构学转向动力学及控制等方面[3]。因 此在设计过程中对其进行动力学建模与分析是非常 必要的。
在静坐标系中,根据牛顿公式,系统的惯性力为:
Fg = -(m + M )ag
(1)
式中,ag 为 3 个平动方向的加速度 ag = [a4
a5
]a T 6
;
M 为负载质量;
m 为运动平台质量。
在动坐标系中,根据欧拉动力学方程,系统在动
坐标系中的惯性矩 Mt 为: Mt = (Jωt)× ωt - Jεt
x(x’) A1(A6)
o(o’)
负载
Om
A3(A4) 运动平台 A2(A5)
B1(B6)