定轴轮系传动比计算
《机械原理》 轮系的传动比
原周转轮系角速度
1 2
3
H
转化轮系中的角速度
1H 1 H 2H 2 H
3H 3 H
HH H H 0
2.传动比计算的基本思路与方法
根据定轴轮系传动比的公式,可写出转化轮系传动比
iH
13
i1H3
1H 3H
1 H 3 H
z2z3 z1 z 2
z3 z1
“-”号表示在转化机构中1H
z3 z1
2.2 周转轮系传动比的计算
1.周转轮系的组成与类型 2.传动比计算的基本思路与方法 3.注意事项 4.计算实例
例1 已知:双排外啮合行星轮系
z1 100, z2 101, z2 100, z3 99
求:传动比 iH1
解:
i1H3
1H
H 3
1 3
H H
z2 z3 z1 z2
第7章 轮系
1 轮系的类型 2 轮系的传动比 3 轮系的功能 4 轮系的设计 5 其他类型的行星传动简介
第7章 轮系
2 轮系的传动比
2.1 定轴轮系传动比的计算 2.2 周转轮系传动比的计算 2.3 混合轮系传动比的计算
2.1 定轴轮系传动比的计算
1.传动比大小的计算 2.主、从动轮转向关系的确定
只起改变方向作用
称为惰轮
定 轴 轮 系 的 传 动 比
所 有 从 动 轮 齿 数 的 连 乘积 所 有 主 动 轮 齿 数 的 连 乘积
2.1 定轴轮系传动比的计算
2 .传动比方向的确定
平面定轴轮系 所有齿轮均为直齿或斜齿圆柱齿轮,
可用(-1)m 来确定从动轮的转动方向。
m —— 外啮合的对数。
传动比为正,说明主、从动轮转向
轮系的传动比计算

构件
原来的转速 转化轮系中的转速
1
n1
n1H=n1-nH
2
n2
n2H=n2-nH
3
n3
n3H=n3-nH
H
nH
nHH=nH-nH=0
转化轮系中,轮1、3间的传动比可以按定轴齿轮系传动比求解:
iH
13
n1H
n
H 3
n1 nH n3 nH
Z2Z3 Z1Z2
Z3 Z1
新能源汽车技术教学资源库
新能源汽车技术教学资源库
定轴轮系:行星架的转速为0。
n2
2
2
2
n3
23
O2
O2
O2
H
H
H
H
nH
O3
O1
OH
O3 O1
OH
O3 O1
OH
1
1
1
1
n1
3
3
3
F=2
差动轮系
F=1
行星轮系
F=1
定轴轮系
2.周转轮系的传动比计算
新能源汽车技术教学资源库
新能源汽车技术教学资源库
用“反转法”,给整个轮系加上一个(-nH),各构件间的相对 运动不变。
(2)空间定轴轮系的传动比计算
新能源汽车技术教学资源库
解:由公式
i16
n1 n6
z2 z3 z4 z5 z6 z1z2 z3 z4 z5
z2 z4 z5 z6 z1z2 z4 z5
因为齿轮1转动方向向下,所以齿轮6的转动方向向左。
三、周转轮系的传动比计算
新能源汽车技术教学资源库
1.周转轮系的组成
(1)对于圆柱齿轮组成的定轴轮系确定传动比正负的方法: a.外啮合的次数; b.画箭头。
轮系的传动比计算
轮系的传动比计算1源自新能源汽车技术教学资源库一、轮系的传动比
轮系中首末两轮的转速之比称为轮系的传动比,用iab表
示。
iab na / nb
轮系的传动比计算,包括计算传动比的大小和确定转向两 个内容。
新能源汽车技术教学资源库
二、定轴轮系的传动比计算
z5 n4 i45 n5 z4
z 2 z3 z 5 n1 3 z 2 z 3 z 4 z5 i15 (1) n5 z1 z2 z3 z4 z1 z 2 z3
新能源汽车技术教学资源库
轮系传动比的一般表达式:
n表示外啮合的次数。
n主 n 各从动轮齿数的乘积 i ( 1 ) n从 各主动轮齿数的乘积
新能源汽车技术教学资源库
例4-7
图示轮系中,已知各轮齿数z1=20,z2=40,z2’=20,z3=30,
解: (1)分解轮系 定轴轮系:轮1,2 周转轮系:轮2’,3 ,H,4 (2)分别计算各轮系传动比 定轴轮系传动比:
z4=80。计算传动比i1H。
i12
(3)联立以上两式,得
n1 z2 2 n2 z1
齿轮4既是从动轮,又是主动轮,其存在不影响传动比,但改
变了外啮合的次数,称为过桥齿轮或惰轮。
(1)对于圆柱齿轮组成的定轴轮系确定传动比正负的方法: a.外啮合的次数; b.画箭头。 (2)当轮系中包含圆锥齿轮、蜗杆蜗轮时,传动比的计算仍用上 式计算,但各轮的转向必须画箭头确定。 a.当首末两轮轴线平行时,仍用正负表示两轮之间的关系。 b.当首末两轮轴线不平行时,不能用正负表示,只能依次画箭
解得
iH1 10000
新能源汽车技术教学资源库
轮系传动比计算
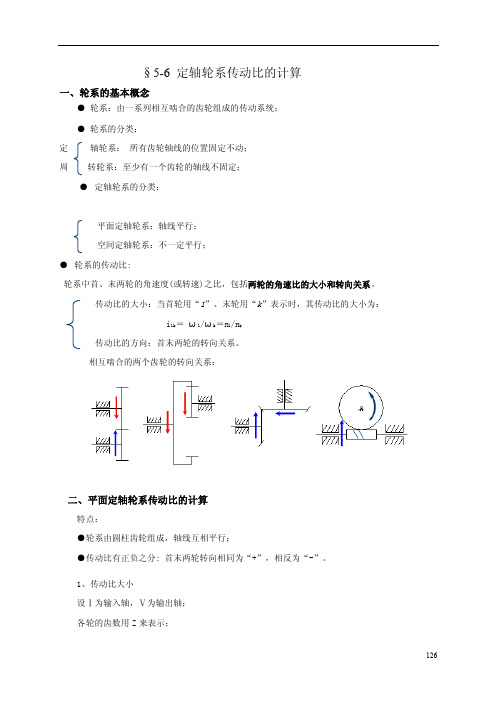
126§5-6 定轴轮系传动比的计算一、轮系的基本概念● 轮系:由一系列相互啮合的齿轮组成的传动系统; ● 轮系的分类: 定轴轮系: 所有齿轮轴线的位置固定不动; 周转轮系:至少有一个齿轮的轴线不固定; ● 定轴轮系的分类:平面定轴轮系:轴线平行; 空间定轴轮系:不一定平行;● 轮系的传动比:轮系中首、末两轮的角速度(或转速)之比,包括两轮的角速比的大小和转向关系。
传动比的大小:当首轮用“1”、末轮用“k ”表示时,其传动比的大小为: i 1k = ω1/ωk =n 1/n k 传动比的方向:首末两轮的转向关系。
相互啮合的两个齿轮的转向关系:二、平面定轴轮系传动比的计算特点:●轮系由圆柱齿轮组成,轴线互相平行;●传动比有正负之分: 首末两轮转向相同为“+”,相反为“-”。
1、传动比大小设Ⅰ为输入轴,Ⅴ为输出轴; 各轮的齿数用Z 来表示;127角速度用ω表示;首先计算各对齿轮的传动比:所以:结论: 定轴轮系的传动比等于各对齿轮传动比的连乘积,其值等于各对齿轮的从动轮齿数的乘积与主动轮齿数的乘积之比; 2、传动比方向在计算传动比时,应计入传动比的符号: 首末两轮转向相同为“+”,相反为“-”。
(1)公式法式中:m 为外啮合圆柱齿轮的对数 举例:(2)箭头标注法采用直接在图中标注箭头的方法来确定首末两轮的转向,转向相同为“+”,相反为“-”。
举例:122112z z i ==ωω32223332z i z ωωωω'''===33434443z i z ωωωω'''===455445z z i ==ωω11211)1(--==k k m k k z z z z i ωω128三、空间定轴轮系的传动比特点:●轮系中包含有空间齿轮(如锥齿轮、蜗轮蜗杆、螺旋齿轮等); ●首末两轮的轴线不一定平行。
1 传动比的大小2 传动比的方向注意:只能采用箭头标注法,不能采用(-1)m 法判断。
轮系的传动比计算

Z3 Z1
新能源汽车技术教学资源库
例4-5 图示行星轮系中,已知z1 = 50、z2 = 30、z3 = 100,求传动 比i1H。
解:根据转化轮系法,齿轮1、3和行星架轴线相重合
由
i1H3 =
n1 n3
nH nH
=
z2 z3 z1 z2
=
z3 z1
即
i1H3
=
n1 nH 0 nH
=
100 50
=
2
解得 i1H = n1 / nH = 3
新能源汽车技术教学资源库
例4-6 图示的差动轮系中,已知z1 = 20、z2 = 30、z3 = 80,齿轮 1和齿轮3的转速大小为10r/min,方向相反。求行星架H的转速及传 动比iH1。
解:设齿轮1转向为正,则
n1 10r / min,n3 10r / min
4
1.周转轮系的组成
太阳轮与行星架几何轴线必须重合!
太阳轮
周 转
行星轮
轮 行星架
系 机架
轴线位置固定 既自转又公转 又称系杆
一个基本周转轮系中, 行星轮可有多个,太阳轮的 数量不多于两个,行星架只 能有一个。
太阳轮 行星轮 太阳轮
行星架 机架
ω3
H2
ωH
1
O
ω1
3
周转轮系的分类 差动轮系:太阳轮都能转动的周转轮系; 行星轮系:有一个太阳轮固定不动的周转轮系。
四、混合轮系的传动比计算
1.混合轮系 混合轮系:由定轴轮系 + 周转轮系、或由几个单一的周转
轮系组合而成的轮系。
2.计算混合轮系传动比的方法和步骤:
(1)划分出基本类型的轮系。 (2)分别列出周转轮系和定轴轮系的传动比计算公式。 (3)联立求解,求得所需的参数。
§11.2 定轴轮系的传动比

齿轮回转方向
用线速度方向表 示齿轮回转方向
投影方向
机构运 动简图 投影方向
机械设计系 机械设计系
§11.2 定轴轮系的传动比
• 2.首末两轮的转向
• (1)平面定轴轮系
一对齿轮的传动比:
1 1 2 2
i12=
±
z2 z1
“+”号表示内啮合两轮转向相同, “-”号表示外啮合两轮转向相反。
空间定轴轮系传动比前 的“+”、“-”号没有实 际意义。
不平行
机械设计系 机械设计系
§11.2 定轴轮系的传动比
• 2.首末两轮的转向
• (2)空间定轴轮系
如何表示一对圆锥齿轮的转向?
机构运动简图
线速度方向
表示齿轮回转方向 用线速度方向表 示齿轮回转方向 齿轮回转方向
机械设计系 机械设计系
§11.2 定轴轮系的传动比
向关系则必须在机构简图上用箭头来表示。
1 z2 zk i1k k z1 zk 1
机械设计系 机械设计系
§11.2 定轴轮系的传动比
• 2.首末两轮的转向
• (2)空间定轴轮系
• 空间定轴轮系中含有轴 线不平行的齿轮传动;
不 平 行
•
•
“+”、“-”不能表示 不平行轴之间的转向关系;
§11.2 定轴轮系的传动比
• 2.首末两轮的转向
3
• (1)平面定轴轮系
1 3 z 2 z 3 z 4 z5 i15 ( 1) z4 5 z1 z2 z3
2 1 3' 4 5
4'
1 m z2 zk i1k (1) k z1 zk 1
定轴系传动比
§5-6 定轴轮系传动比的计算一、轮系的基本概念●轮系:由一系列相互啮合的齿轮组成的传动系统;●轮系的分类:定轴轮系:所有齿轮轴线的位置固定不动;周转轮系:至少有一个齿轮的轴线不固定;●定轴轮系的分类:平面定轴轮系:轴线平行;空间定轴轮系:不一定平行;●轮系的传动比:轮系中首、末两轮的角速度(或转速)之比,包括两轮的角速比的大小和转向关系。
传动比的大小:当首轮用“1”、末轮用“k”表示时,其传动比的大小为:i1k=ω1/ωk=n1/n k传动比的方向:首末两轮的转向关系。
相互啮合的两个齿轮的转向关系:二、平面定轴轮系传动比的计算特点:●轮系由圆柱齿轮组成,轴线互相平行;●传动比有正负之分: 首末两轮转向相同为“+”,相反为“-”。
1、传动比大小设Ⅰ为输入轴,Ⅴ为输出轴;各轮的齿数用Z来表示;126127角速度用ω表示;首先计算各对齿轮的传动比:所以:结论: 定轴轮系的传动比等于各对齿轮传动比的连乘积,其值等于各对齿轮的从动轮齿数的乘积与主动轮齿数的乘积之比; 2、传动比方向在计算传动比时,应计入传动比的符号: 首末两轮转向相同为“+”,相反为“-”。
(1)公式法式中:m 为外啮合圆柱齿轮的对数 举例:(2)箭头标注法采用直接在图中标注箭头的方法来确定首末两轮的转向,转向相同为“+”,相反为“-”。
举例:122112z z i ==ωω32223332z i z ωωωω'''===33434443z i z ωωωω'''===455445z z i ==ωω11211)1(--==k km k k z z z z i K K ωω三、空间定轴轮系的传动比特点:●轮系中包含有空间齿轮(如锥齿轮、蜗轮蜗杆、螺旋齿轮等);●首末两轮的轴线不一定平行。
1 传动比的大小2 传动比的方向注意:只能采用箭头标注法,不能采用(-1)m法判断。
分两种情况讨论:情况1:首、末两轮轴线平行传动比计算式前应加“+”、“-”号,表示两轮的转向关系。
[新版]行星轮系传动比的计算
![[新版]行星轮系传动比的计算](https://img.taocdn.com/s3/m/8f9ebf6c1611cc7931b765ce05087632311274cc.png)
行星轮系传动比的计算
回忆上节内容:定轴轮系传动比的计算公式为:i1k=n1/nk=i1*i2*i3* (i)
定轴轮系的特点是:每个齿轮都是围绕固定的周线旋转,没有自身的公转.
今天我们看以下行星轮系,请同学们思考:行星的运动特点?
对,行星一方面不仅围绕固定的轴线旋转,而且会围绕太阳公转.
下面这张图就是行星轮系,结构和特点我们看一下:
结构:齿圈,太阳轮,行星轮,行星齿轮架
原理:行星齿轮不仅自转,还有围绕太阳轮的公转.
计算传动比:转化法:化行星轮系为定轴轮系
简化结构如下:
太阳轮:n1 z1
行星轮:n2 z2
齿圈:n3 z3
行星架:nh Zh
则传动比计算公式为:ng-nh/nk-nh=(-1)m齿轮G,K之间所有从动轮齿数的连乘积/齿轮G,K之间所有主动轮齿数的连乘积
例题:如图所示为圆锥齿轮组成的差动轮系,Z1=Z2=Z3,求齿轮1,3和行星架H三者转速的关系
解:该轮系为差动轮系,其中齿轮1,3及行星架H的轴线均互相平行或重合,将齿轮1看作主动轮,齿轮3看作从动轮,并设齿轮1的转向为正,通过画箭头,齿轮3的箭头与齿轮1 的相反,故为负,由公式计算:
N1-nh/n3-nh=-z2z3/z1z2=-z3/z1=-1
所以三者转速关系为:
2nh=n1+n3
分析:行星轮系在汽车上的应用:1.汽车后桥差速器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
赵建华09模具讲授2010 11 8 十二2课时第7章轮系
§7-1 定轴轮系传动比计算
1、了解链传动的
2、了解V带传动的安装需要注意的问题
1、带传动的工作原理、滑动分析
2、带传动的受力分析和应力分析
1、带传动的滑动分析
2、带传动的受力分析和应力分析
1、培养学生学会应用工具书
2、提高学生合作探索新知识的能力
无
教学方法及思路
1、回顾复习
2、新课导入及讲解
3、课堂小结
4、课堂练习及布置作业
5、教学后记
教学过程及时间安排 一、回顾复习
1、复习方式:学生答问及老师点评复述相结合
2、复习内容:①滑动速度的计算及其影响;②蜗杆传动效率的影响因素
③蜗杆传动的失效形式
二、新课导入
在有关传动的章节的学习过程中,我们都只是研究了单一的传动问题。
但在 机械设备中,单一的传动系统很难于满足实际生产中的多种要求。
因此,我们常 需要采用一系列的传动来实现不同情况的需求。
三、新课讲授 第7章 轮系
§7-1 定轴轮系传动比计算
轮系的传动比:在轮系中,始端主动轮1(首轮)的转速n 1与末端从动轮K (末 轮)的转速n K 之比。
1、一对齿轮的传动比:
上式中,n 表示齿轮的转速;z 表示齿轮的齿数;i 为传动比
说明:①对于一对圆柱齿轮传动,外啮合传动中,两轮转向相反,其传动比为负
⎪⎩
⎪⎨⎧固定轴线回转的轮系
绕另一个以上齿轮的回转轴线在传动中,有一个或一行星轮系轴线位置的轮系有齿轮都具有固定几何定轴轮系:在传动中所
轮系1
2
122112z z z z n n i μ===
号;内啮合传动中,两轮方向相同,其传动比为正号。
如图7-1所示 ②两轴的转向,可用画箭头的方法表示:外啮合箭头反向;内啮合箭头同向。
如图7-1所示。
③对于锥齿轮传动和蜗杆传动,由于其轴线不平行,不能用正、负号说明其 方向,只能用画箭头的方法,如图7-2所示。
图7-1 图7-2
2、定轴轮系传动比计算
(1)定轴轮系的传动比:等于首轮的转速与末轮的转速之比。
(即等于组成该轮
系的各对啮合齿轮传动比的连乘积。
)即为:
上式中,m 为圆柱齿轮轮系中外啮合的数目
说明:①在圆柱齿轮传动过程中,每遇到一次外啮合,传动比的符号就改变一次,
如果轮系中有m 次外啮合,则传动比的正负号将改变m 次
②对于含有锥齿轮传动、蜗杆传动的定轴轮系,由于其轴线不平行,上式 只能算其大小而不能确定方向(只能用画箭头的方法来表示其方向) ③轴线平行的定轴轮系,先画箭头再定正负号
齿数的连乘积
各对齿轮中所有主动轮
齿数的连乘积
各对齿轮中所有从动轮
m k k n n i )1(11-==
(2)过桥轮(惰轮):在定轴轮系传动中,对传动比的数值没有影响,却能影响
传动比正负号的齿轮。
(3)定轴轮系传动比的计算步骤:
①分析定轴轮系,确定是否存在锥齿轮传动或蜗杆传动(轴线非平行情况)
②逐个分析主动轮和从动轮个数,以及惰轮
③根据已知条件,应用定轴轮系传动比公式求解
3、例题分析:见教材例7-1。
(略)
四、课堂小结
1、回顾本课时的所有内容
2、明确本课时的重难点内容,以及提出本课时的学习任务
3、通过提问抽查学生对所讲授的内容掌握情况,并进行补充分析点解
五、课堂练习
P115 思考题 1、2
六、作业布置
P115 习题 1
七、教学后记
附:板书设计
第7章 轮系
§7-1 定轴轮系传动比计算 1、轮系的概述
⎪⎩
⎪⎨⎧固定轴线回转的轮系绕另一
个以上齿轮的回转轴线在传动中,有一个或一行星轮系轴线位置的轮系有齿轮都具有固定几何定轴轮系:在传动中所
轮系2、一对齿轮的传动比计算:
1
2
122112z z z z n n i μ
===
3、定轴轮系的传动比计算:
齿数的连乘积
各对齿轮中所有主动轮齿数的连乘积各对齿轮中所有从动轮m k k n n i )1(11-==
4、惰轮
5、定轴轮系传动比的计算步骤: ①分析定轴轮系,确定是否存在锥齿轮传动或蜗杆传动(轴线非平行情况) ②逐个分析主动轮和从动轮个数,以及惰轮
③根据已知条件,应用定轴轮系传动比
公式求解 6、例题分析:略
图7-3
(注:范文素材和资料部分来自网络,供参考。
只是收取少量整理收集费用,请预览后才下载,期待你的好评与关注)
127 / 6。