判决引导和常数模融合盲均衡算法研究
一种修正的双模式盲均衡算法研究
摘 要 :传统 的C MA 盲均衡算法存在收敛速度较慢 、稳态均方误差较 大的缺点 。结 合了判决 引导算法 的C MA 算 法虽具有稳态 均方误差小的优势 ,但是算 法本 身收敛能力弱 ,在信号 眼图未张开的条件下难以保证算法收敛 。 针对上述不 பைடு நூலகம் ,提 出了一种含软判决 思想 的双模式盲均衡算法 。该算 法通 过最大化均衡器输 出信号 的后验概率
密度 函数来获 得均衡器抽头系数 的最优值 。计 算机仿真结果表 明,所 提算 法可以有效地纠正输 出信号的相位旋
转 ,具有较好 的均衡效果 。
关键词 :盲均衡 ;稳态均方误差 ;软判决
中 图分 类 号 :T N 9 1 1 . 2 文 献 标 识 码 :A
St udy o f M o d i ie f d Dua l M o de Bl i nd Eq ua l i z a t i o n Al g o r i t hm
ZHANG S hu — y o ng , LI Xi a o — bo , GUO Ya n , LI ANG Guo — do n g
(1 . P L A Mi l i t a r y Re p r e s e n t a t i o n Of i f c e i n Ha r b i n Be a r i n g Gr o u p Co r p o r a t i o n ,
c o r r e c t t he p ha s e r o t a t i o n o f t h e c a r r i e r f r e q ue n c y i S g o od .
Ke y wo r d s: bl i n d e q u a l i z a t i o n; s t e a d y s qu a r e e ro r ;s of t d e c i s i o n- d i r e c t e d
基于变步长双模式盲均衡的研究
基于变步长双模式盲均衡的研究摘要本文提出了一种改进的双模式盲均衡算法。
目的是为了提高盲均衡的稳态误差及其收敛速度,新算法的基本思想是将变步长的常数模算法(CMA)和判决引导(DD)算法相结合,这两种盲均衡算法通过一个判决圆环来实现硬切换。
同时,引入变步长因子,通过仿真实验,结果表明,新算法的特点是收敛速度较快、收敛精度较高,而且,能去除码间干扰。
关键词双模式盲均衡;CMA-DD-LMS;变步长;收敛速度;收敛精度0引言CMA盲均衡算法是在判决错误率保持在足够低的水平时,作为双模式盲均衡的冷启动,将CMA盲均衡算法切换为DD-LMS算法。
变步长的双模盲均衡算法的引入,是建立在CMA-DD-LMS算法基础之上的,目的是达到较好的收敛稳健性。
同时,该算法的引入既加快了收敛速度、又减小了稳态误差。
1常数模算法(CMA算法)CMA算法代价函数为:,其中,a(k)表示传输信号,等效基带信道的冲激响应记为h(k),高斯白噪声记为n(k);y(k)表示均衡器的输入向量,z(k) 表示均衡器的输出,表示判决器输出。
通常情况下,P的取值等于2。
2判决引导算法(DD算法)该算法采用的思想如下:自适应LSM算法中的参考信号可由其估计值代替,输出由判决器输出代替的条件是误差判决率足够小。
该算法的优点体现在:收敛速度快、稳态误差小。
缺点是在判决错误率较高时无法收敛。
算法采用收敛稳健性较好的盲均衡算法是在盲均衡器输出信号的眼图处于闭合状态时,而在眼图张开以后,便切换到误码性能较好的DD-LMS算法。
3新算法双模式算法的切换条件:判决圆的半径取值范围在不考虑噪声的情况下,取值为,该信号星座的最小水平用D表示(或垂直间距)。
而判决圆的取值范围在考虑噪声的情况下,取值为。
其中,信噪比用N表示,该信号星座最外层星座点所在圆的半径用表示。
DD算法在信号星座中某一点的判决域,如下图中的方框区域,算法切换判决圆的半径用d表示。
双模式算法的切换原理如下:当算法未达到完全收敛状态时,此时将有大量的输出信号落于判决圆的外部,所以采用稳健性能好、收敛速度快的变步长CMA方法进行盲均衡。
稳定水声通信判决反馈盲均衡算法研究

V0 . 9 11 No 3 .
电 子 设 计 工 程
El c r n c De i n En i e rn e to i sg g n e i g
2 1 年ቤተ መጻሕፍቲ ባይዱ2月 01
Fb2 l e . 01
稳 定水声通信判决 反馈盲均衡算 法研 究
彭鹏 菲 ,丰 少伟 ,罗亚松
的归一化修 正常模盲 均衡算法 具有更好 的收敛 能力与稳 定性 , 具有较强 的抗干扰 能力 , 能保 证水 声通信 高效运 行。
关 键 词 :水 声 通 信 ;盲均 衡 ;常 数 模 ;多 径 效 应
中图 分 类 号 : r 3 3 r 9 P 文献标识码 : A 文 章 编 号 :1 7 — 2 6 2 1 ) 3 0 0 — 3 64 6 3 (0 1 0 — 0 10
tc nq e h sb t rc n eg n e a d sa i t,a d h sa srn a a i frssig dsu b n e hc a sue te e h iu a et o v re c n tbly n a t g c p ct o e i n itra c ,w ih c n as r h e i o y t
P ENG e g f i ENG S a — i UO Ya s n P n —e ,F h owe ,L —o g
(colfEet n ni ei , ayU i r t o n ne n , hn 4 0 3 ,C ia S ho o lc o i E g e r g N v nv sy fE g er g Wu a 30 3 hn ) r c n n e i i i
( 军工程大学 海 电子 工 程 学 院 ,湖 北 武 汉 4 0 3 ) 30 3
常数模盲均衡系统模型_水声信道常数模盲均衡:理论、算法与仿真_[共3页]
![常数模盲均衡系统模型_水声信道常数模盲均衡:理论、算法与仿真_[共3页]](https://img.taocdn.com/s3/m/cace21b39b6648d7c1c746f0.png)
第2章 常数模盲均衡的基本原理25练码元,均衡器根据接收判决信号和训练码元得到误差信号()e n ,在误差信号的基础上,利用某种自适应算法对均衡器权系数进行更新,最终实现对通信信道特性的补偿。
一旦初步捕获信道特性,均衡器则根据接收到的用户信号跟踪信道的变化。
通常情况下,为了保证均衡器不失锁,需要在发送的用户信号中插入周期的、重复的训练序列。
训练序列的长度与信道的特性以及均衡算法的收敛速度有关,当信道具有严重衰落时,需要发送较长的训练序列或者使用具有较快收敛性能的均衡算法才能使均衡器权系数接近信道的逆。
因此,自适应均衡的跟踪阶段只能够跟踪缓慢变化的信道特性。
根据传统自适应均衡技术的分析可知,对训练序列的需求是浪费通信带宽资源的主要因素,并且如果通信信道出现短时突变情况,需要中断通信,重新初始化接收机。
盲自适应均衡技术采用自适应恢复思想,在不需要训练序列的条件下可以实现对通信信道特性的补偿和跟踪,能够有效节省通信带宽,防止均衡器失锁。
盲均衡技术在无线通信尤其是水声通信系统中体现出了潜在的应用价值。
在已有的各类盲均衡算法中,CMA 盲均衡由于其计算简单、容易实现而得到了重视,但是CMA 盲均衡具有收敛速度慢、收敛后稳态剩余误差大的缺陷[29],因此出现了在CMA 盲均衡基础上的大量改进算法。
需要指出的是,虽然CMA 盲均衡对具有常模特性的发送信号具有稳健的均衡性能,但是CMA 同样可以适用于非常模发送信号的均衡问题,典型的应用是高阶PAM 信号的均衡。
尽管PSK 调制方式普遍应用于相干水声通信系统,在仿真中仍然会引入其他的调制信号来对算法的性能进行比较和分析。
2.2 常数模盲均衡2.2.1 常数模盲均衡系统模型CMA 盲均衡的等效基带模型[30]如图2-2所示。
发送信号()x n 经过未知信道()h n 传输并叠加噪声()n n ,在均衡器前得到观测信号序列()y n ,观测信号()y n 经过均衡器()w n 获得输出信号()xn 。
盲均衡算法分类_水声信道常数模盲均衡:理论、算法与仿真_[共6页]
![盲均衡算法分类_水声信道常数模盲均衡:理论、算法与仿真_[共6页]](https://img.taocdn.com/s3/m/1d03ad0d50e2524de5187ef1.png)
水声信道常数模盲均衡:理论、算法与仿真14为Nx c 。
如果0Nx c ≠,0Nx c ≠ ,根据BBR 公式可知()N Nx Nx i i c c c n =∑(1-46)定义发送信号序列()x n 和均衡器输出信号序列()xn 的(,)M N 阶归一化累积量(,)x K M N 和(,)x K M N 分别为(,)[](,)[]M N x Mx Nx M N x Mx Nx K M N c c K M N c c ⎧=⎪⎨=⎪⎩ (1-47) 根据式(1-46)可得(,)()()(,)M N x i i x i i K M N c n c n K M N ⎡⎤=⎢⎥⎣⎦∑∑(1-48)根据式(1-48),Gadzow 定理可以描述为:假定信道的输入信号()x n 为非高斯、独立同分布的平稳随机过程,则输入、输出的归一化累积量有如下关系成立:① 如果N 为偶数,并且M N >,则有(,)(,)x x K M N K M N ≤;② 如果N 为奇数,并且M N <,则有(,)(,)x x K M N K M N ≥。
Gadzow 定理从归一化累积量的角度证明了盲均衡实现的条件,可在上述结论基础上,利用极值化方法构建盲均衡算法,由于累积量的阶数在Gadzow 定理中是可以选择的,因此在Gadzow 定理的基础上形成了一簇盲均衡算法,使得Gadzow 定理具有很好的推广价值。
实质上,大多数盲均衡算法的理论基石均是信道系统输入输出之间的高阶统计特性与信道系统本身特性之间的关联,在盲均衡算法的设计和性能分析中,信号的高阶统计特性都是有力的数学工具。
1.3.2 盲均衡算法分类盲均衡算法不依赖于发送信号和通信信道的信息,仅根据接收观测信号实现对发送信号的恢复,为了设计一种能够自适应调节均衡器权系数的算法,需要对接收观测信号进行非线性变换。
针对非线性变换的时机不同,可以将盲均衡算法分为三类[21]:Bussgang 类盲均衡算法、高阶累积量盲均衡算法和非线性均衡器盲均衡算法,如图1-6所示。
判决反馈盲均衡的设计与仿真
判 决 反 馈 盲 均 衡 的 设 计 与 仿 真
江苏金 陵机 械 制造 总厂 徐 立升
【 摘要 】 介绍了判决反馈均衡算法的 实现 ,并将 最陡下降恒模算法应用到D F E ,实现 了自 适应算法 ,通过仿真比较了均衡前后的星座图,并
分析 均衡 前后 的误 码率 曲线 ,验证 了恒模 算 法 的D F E 可减 小 多径 效应的 干扰 、
【 关键词 】 判决反馈 ;恒模算法;误差传播
0 引 言
j 二 用无线通信 领域 ,受传输环境的杉响,传输信 号经过不I 路径到 达接收系统,使得接 收端 的波形 叮避 免的产生码问f扰 。为 J 提高通 信质量,减小码 问干扰 ,接收端通常采 『 l j 均衡器来消除码问干扰 。在各
1 判决反馈均衡器原理
D F E 由前 馈滤 波 器 、反 馈滤 波 器和 判 决器 三个 部 分组 成 … 。 原 理 图如 图1 所 示。
4 6
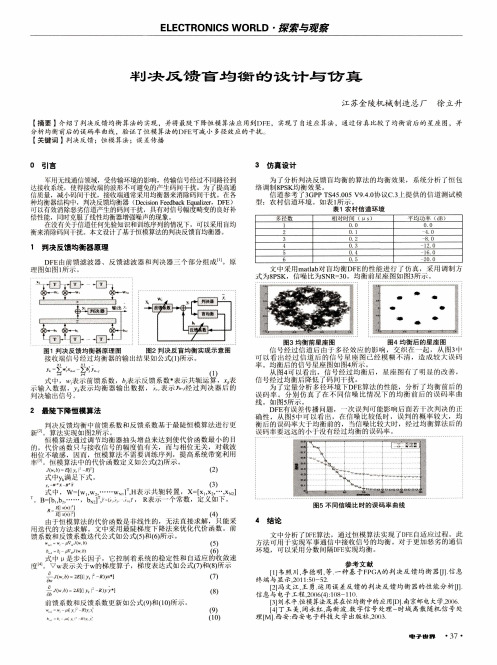
丈 中采 川ma t l a b 对盲 均 衡DF E 的 性 能进 行 了仿 真 ,采 用 涮制 方 式 为8 P S K,信 噪 比为S NR =3 0 。均新 n d 摩 图如 图3 所示。
表 1农 村 信 道 环 境
多i 1 f = 数
1
卡 ¨对时 I ' i f J【u s)
0. 0 0 I
 ̄ F: B j 功率 ( d B )
O 0 1 O 8 0 I 2. ( ) l 6. 0 2 O. O
: j
0 2 0 : { 0 I 0 5
~ 1 1 1 . — 一
.
◆
一种双模式盲均衡算法
衡器 * 是采用抽头延迟线模型的线性均衡器, 假设 其抽头数为 " + , ! !
图 !# 盲均衡系统框图
#" 算法介绍
#$ !" %%&’() 和 (*(+ 算法 $$ %&’( 与文献 [)] 中介绍的 ’*’+ 都是基于 随机梯度下降 ( (,$ ) 的算法, 该类算法对均衡器抽 头系数更新的迭代公式可以表示为 ( (# ) ") ! # , ! - ! # . "/ # (!)
! # 和 " # 分别是第 # 次迭代时的均衡器抽头系数矢 是误差控 量和接收信号矢量; / ( (# ) " 是迭代步长; 制函数; ( # 为 # 时刻均衡器的输出, 且( # - ! # "# ! 由于采用了不同的代价函数, 所以 $$ %&’( 与 ’*’+ 具有不同的误差控制函数! $$ %&’( 的误差 控制函数为 ) / ( (# ) $$ - ( # . " # ’*’+ 的误差控制函数为 / ( (# ) - ( #, ( (" #, . . 1", .) . . - ( #, ( ( #, . 1", / ( (# ) 1) 1 1 1 式中, 1", . 2 3 " #, 33 . 2 3 " #, 3" . ; 1", 1 2 3 " #, 33 1 3 " #, 3" 1
!" ##! $%, ! !" !&& $ ’ !" !!$ &%,! ,! ,!" ()$ # * !" !$( #%] , 发 送 信 号 为 ,(-./, " # (, 长度为 ) #(! , 均衡器的抽头数为 ,# , 均衡器中心抽头初始 化为 #" & ’ !0, 其他的为 ! ’ !0, 信噪比为 ,! 12, 迭代 步长 ! / 与 ! 3 分别为 #! ! ) 和 ) 4 #! ! 5 $ 对 /6/. 和 /6/. ’ 33 *7/8 算法各进行 #! 次 /9:;< 6=>?9 仿 真, 并分别考虑判决圆半径为 !" ) 、 !" @ 、 !" $ 的情况, 结果如图 # 和 ( 所示$
一种改进的变步长常模判决反馈盲均衡算法
一种改进的变步长常模判决反馈盲均衡算法张家生;崔鹏鹏;沈忱;韩迎鸽【摘要】针对基于CMA的DFE盲均衡算法收敛速度慢、收敛后稳态剩余误差大的缺点,提出了一种改进的基于CMA的DFE盲均衡算法.该算法通过引入均方误差作为调整步长的参量,构造出指数型变步长函数,把基于CMA的DFE盲均衡算法中前馈滤波器和反馈滤波器更新方程中的固定步长值变为可变值,并对其收敛性做了分析.计算机仿真表明,改进算法具有较快的收敛速度和更小的剩余误差.%Aiming at the shortcomings of slow convergence rate and large residual error of Constant Modulus Algorithm Decision Feedback Equalization(CMA-DFE),this paper proposes an improved DFE equalization algorithm based on CMA.In this algorithm, mean square error is adopted as the step parameter, and this algorithm constructs the index variable step function.In the DFE based on CMA blind equalization algorithm, the fixed step size of the feedforward filter and the feedback filter updating equation is changed to variable value, and this paper analyzes its convergence.The computer simulation results indicate that the improved algorithm has faster convergence speed and lower residual error.【期刊名称】《微型机与应用》【年(卷),期】2017(036)009【总页数】4页(P71-73,77)【关键词】CMA;码间干扰(ISI);判决反馈均衡器(DFE);变步长【作者】张家生;崔鹏鹏;沈忱;韩迎鸽【作者单位】安徽理工大学电气与信息工程学院,安徽淮南 232001;安徽理工大学电气与信息工程学院,安徽淮南 232001;安徽理工大学电气与信息工程学院,安徽淮南 232001;安徽理工大学电气与信息工程学院,安徽淮南 232001【正文语种】中文【中图分类】TN911高速数据通信系统中,码间干扰是影响通信质量的主要决定因素,为了消除码间干扰(Inter Symbol Interference, ISI),必须进行信道均衡。
《盲均衡算法及其FPGA实现的研究》范文
《盲均衡算法及其FPGA实现的研究》篇一一、引言在现代通信系统中,信号传输的质量往往受到各种因素的影响,如信道失真、多径干扰和噪声等。
为了克服这些问题,盲均衡技术应运而生。
盲均衡算法能够在不依赖训练序列或先验信息的情况下,自适应地纠正信道失真,提高信号的传输质量。
随着硬件技术的发展,FPGA(现场可编程门阵列)因其并行处理能力和可编程性,成为实现盲均衡算法的理想平台。
本文将详细介绍盲均衡算法的原理及其在FPGA上的实现。
二、盲均衡算法原理盲均衡算法是一种自适应滤波算法,它利用接收信号的统计特性来估计并补偿信道失真。
该算法不需要发送端的训练序列或先验信息,因此具有很高的灵活性和通用性。
其基本原理是通过迭代的方式,不断调整滤波器的系数,使输出信号的某种度量(如信噪比)达到最优。
常见的盲均衡算法包括最小均方(LMS)算法、归一化最小均方(NLMS)算法以及其改进型等。
这些算法在迭代过程中,通过计算误差信号与滤波器系数的乘积来更新滤波器系数,从而实现对信道失真的补偿。
三、FPGA实现FPGA是一种可编程的数字逻辑器件,具有并行处理能力和高运算速度。
将盲均衡算法在FPGA上实现,可以充分利用其并行处理能力,提高系统的处理速度和性能。
在FPGA上实现盲均衡算法,需要设计合适的硬件架构和编写高效的算法代码。
首先,根据算法的原理和需求,设计合理的滤波器结构、控制逻辑和接口电路等。
然后,使用硬件描述语言(如Verilog或VHDL)编写算法的代码,并对其进行优化和仿真验证。
最后,将编译后的代码下载到FPGA芯片中,完成系统的搭建和测试。
在FPGA上实现盲均衡算法时,需要注意以下几点:一是要合理安排滤波器的系数存储和更新逻辑,以提高运算速度;二是要优化算法的并行处理能力,以充分利用FPGA的并行处理能力;三是要考虑系统的实时性和可扩展性,以满足不同应用场景的需求。
四、实验结果与分析为了验证盲均衡算法在FPGA上的实现效果,我们进行了仿真和实际测试。
一种双模式盲均衡新算法
A w ua - o e a g rt ne d lm d l o ihm o ln qu lz to f r b id e aia in
RAO e , GUO ・ a W i Ye c i
( e a m n o l tcl n i e n , nu U i r t o c neadT cnlg , ui n 220 , hn ) D pr et f e r a E g er g A h i n e i f i c n eho y H a a 30 1 C ia t E c i n i v sy S e o n
A b t a t sr c : I r e o o e c me t e so c n eg n e r t n a g e i u ler ra e o v r e c n o d rt v r o h lw o v r e c ae a d lr e r sd a ro f rc n e g n e t
J n ,2 0 u. 07
一
种双模式盲均 衡新算法
饶 伟 , 业 才 郭
( 安徽 理 工大 学 电气工程 系, 安徽 淮 南 2 2 0 ) 3 0 1
摘 要 : 为了克服常数模算法( M ) C A 收敛速度慢、 稳态剩余误差大的缺点, 研究了常数模算法与判决引导算
法 ( D 相 结 合 的双 模 式 盲 均 衡 算 法 , D ) 通过 分 析 C MA和 D D之 间 的相 似 之 处 , 出 了 一 种新 的切 换 条 件 用 于 该 算 法 中 引
mo e; u d r a e c u t ha n l. d n e w tra o si c n e s c
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Sm ua o e ut idc t a fso l d q aia o g rtm r vd s hg e c n e g n e r t a d i l t n r s l n ia e t t u in b i e u z t n a o h p o i e i h r o v r e c ae n i s h n l i l i
中图 法分 类 号 :T N9l . 15 文 献标 识 码 :A 文 章 编 号 :1 0 .6 0 2 0 -3 4 60 0 03 3 ( 0 8) - 4 -4 00
A t d f f so l d e u l a i n b s d s u y o u i n b i q a i to a e n z o n DD n a d CMA
( 连 民族 学 院 机 电 信息 工 程 学 院 。大连 1 6 0 ) 大 1 60
摘 要 :结 合 判 决 引 导 ( DD: eiinDr ce ) 法 和 常数 模 算 法 ( MA:o satMo uu loi m) D cs -i td 算 o e C C ntn d ls Ag r h 的各 自优 t 点 , 究 了一 种基 于 D 和 C 研 D MA 的融 合 盲均 衡 算 法 。DD算 法 收 敛 速 度快 , 要 求 初 始 接 收信 号 眼 图 张开 , MA算 但 C 法 稳 健 , 是 收敛 速 度 慢 , 此 , 但 为 对接 收信 号 依 D 算 法 和 C D MA 算 法 获 得 瞬 时 误 差 后进 行 加 权 融 合 处 理 . 加 权 后 以
b te ro a c . et r pe r n e f m
Ke r :DD ( c o - re t d A g r h ;C y wo ds De mi nDi c e o i m) MA ( n t n d u g rt m) u in bid l t Co a t Mo u s Alo i s l h ;f so l n
XI AO i g, DONG u h a Yn Y -u
( o ee o lcrmeh nc la d If r t n En i ern C lg f E eto ca ia n no ma i gn e ig,Dain Nain l y U iest l o la t ai nvr i o t y,Dai n 16 0 ,C i a l 16 0 hn ) a
so l w.S ih ig a d f s g t e ta se t er r o e r c ie ina ban d b o weg tn n u i rn in ro s f t e ev d sg lo t ie y DD d CMA , a d n h h n a n h n u ig h weg t d ta se t e rr t u d t e uaie ih o f ce t c n b a b te ou o . te sn t e ih e rn in ro s o p ae q l z r weg t c e in a e et r s lt n i i
获得 的瞬 时误 差 对 均 衡器 权 系 数 进 行调 节 , 实现 均 衡 。 算 机仿 真 证 明 了融 合 盲 均 衡算 法 有 效 提 高 收敛 速 度 的 同时 计 具有 良好 的稳 健 性 和 均衡 性 能 。
关键 词 :D D算 法 ; MA 算 法 ; C 融合 盲均 衡 算 法
维普资讯
第2 7卷第 3期
20 0 8年 6月
声
学
技
. J n ,2 0 u . 08
Te h i a o s i s c n c l Ac u t c
判决 引导和常数模融合盲均衡算法研 究
肖 瑛 .董玉华
e uaia o q l t n zi
度 慢不利 于对 时 变信 道 的实 时跟 踪 , 稳态 剩余 误 差
1 引 言
数 字 通信 中 , 径效 应 和有 限通 信 带宽 会导 致 多
接 收信 号 产生 码 间干 扰 (S ) ]盲均 衡 技术 不需 要 II , 训 练 序列 即能 实现 均 衡 消除 码 间 干扰 [, 以有 效 2可 ] 的节省通 信带宽 , 提高通 信效 率 。CV-算法是 一 种 I ̄ L 间接利 用 信号 高 阶统计 量 的盲 均衡 算 法 , 计算 简单 算 法稳健 _, 是直 接利用 C 3但 ] MA实现盲 均衡 具有 收