多模算法简介
基于最大互信息的人脑多模图像快速配准算法
维普资讯
生 物 医学 工 程 研 究
J ra fBo dclEniern R sac  ̄ n lo ime ia gn eig eerh
基 于 最 大 互 信 息 的人 脑 多模 图像 快 速 配 准算 法 *
付宜 于晓 王 利 , 龙 , 跃华
Fa t Al o ih fBr i u t — m o a iy I a e s g r t m o a n M li — d l m g t Re it a i n Ba e n M a i a u u lI f r a i n g s r to s d o x m lM t a n o m to
so s a ts grh os’ ne au r—ajs et fm g s uo .S a i er f uo a o dt dat eo hw th o t dent edm na pe d t n o iaer o tn oihsh hdg eo t tna eav a f h t ia i m l l um e li t g 的轮 廓 , 用基 于轮廓 的 力矩 主轴 法计 算初 始平 移量 和旋 转量 , 采 然后设 定初 始 缩放 系数 ,
将此初始配准参数作为改进单纯形法的初始参数 , 以互信息作为相似性测度迭代搜 索, 使互信 息最大, 而 从
实现 最佳 配 准。结 果表 明本 算法 不需要 人 为预 调 整待 配 准 图像 的 分辨 率 , 自动 化 程度 高 , 配准 速 度 快 , 度 精
( . 尔滨工业 大学 47信箱 , 尔滨 100 ; . 尔滨医科 大学附属 第一 医院脑神经外科 , 尔滨 1 0 1 1哈 2 哈 50 1 2 哈 哈 5 0) 0
一种机器人未知环境下动态目标跟踪交互多模滤波算法
m dlie, MM) oe ftr I l 的方 法. 该方法将机器人状态 、 目标状 态和环境 特征状态 作为整体 来构成 系统状态 向量并 利用全 关联扩展式卡尔曼滤波算法对 系统状态进行估计 , 由此随着迭代估计 的进行 , 系统 各对象状 态之间将产 生足够 的相 关性 , 这种相关性 能够正确反 映各 对象状态估 计 问的依赖关 系 , 因此提 高了 目标 跟踪 的准确性 . 该方 法进 一步和传
An i t r c i g m u tp e m o e le i g a g r t m o o ie r b t n e a tn li l d lf t r n l o ih i f r m b l o o s
t r v r c ig o vn bet i n n wn e vr n ns oi o eta kn f mp mo ig ojcs n u k o n io me t
关键 词 : I 滤波 ;K MM E F滤 波 ; 同时 定 位 ; 图构 建 ; 地 目标 跟 踪 ; 动机 器人 移 中 图分 类 号 : P4 . 文 献标 识码 : 文 章 编 号 :6 3 75 2 1 )20 2 — T 226 A 17 - 8 (0 0 0 -t71 4 2
W U Mi g UN j—i n .S i n y
( eat n o o ue, h eo dA tlr E gnei o ee X ’n 10 5, hn ) D pr met f mpt T eScn rl y nier gC lg , ia 0 2 C ia C r ie n l 7
第 5卷第 2期
21 0 0年 4月 智能系统
学
报
VoI5 № . . 2
CAAITr n a to n I tli e tS se a s cinso n elg n y t ms
适用于高阶QAM系统的多模盲均衡新算法

adl e e ys t Me q a r r E a e cne ec mpr i e ocr n MAa d D n w rta - ae a S ur E r ( ) f r ovr ne o ae wt t nur t o sd t n e o MS t g c d hhc e C D n S
维普资讯
第 3 卷 第 2期 0 2 0 年 2月 08
电 子
与
信
息
学
报
V_ .0 . 0 3 No 2 1 F b 2 0 e l .0 8
J u n l f e t o is& I f r to e h o o y o r a cr n c o El n o ma i n T c n l g
Ti ha 【等人分别独立提出的常数模算法( MA 由于计 r i 。 c e r】 C 1
算量小及 良好的收敛性能 已广泛 用于高阶 Q AM 系统中 。
本文的 内容安排如下:文章 的第 2节介绍 了文献 『提 出 4 1 的 CMA+S D 算法 ,第 3节介绍 了本文提 出的两种含软判 D
适用 于高阶 Q AM 系统 的多模盲均衡新算法
窦高奇 高 俊
( 海军工程 大学通信 工程 系 武汉 403 ) 303
摘 要 :利 用 QA 信 号星 座 图特 点 ,该 文 提 出 了两种 含 软 判 决 的多 模盲 均 衡算 法 :MMA+ DD 算 法 和 M S
一种变步长星座匹配多模算法
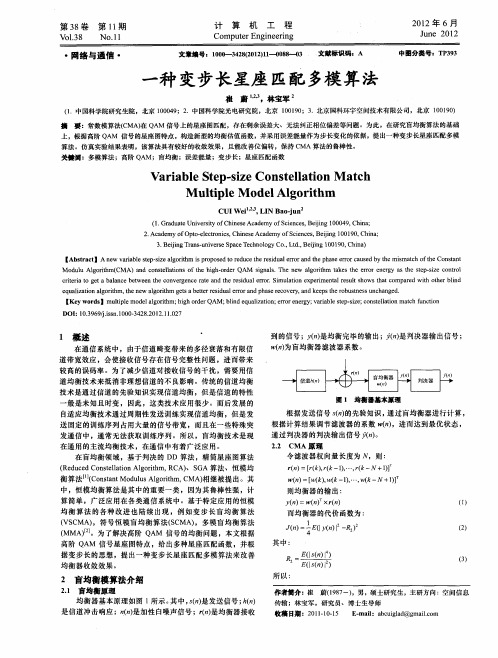
圈 1 均衡器基本原理
自适应均衡技 术通 过周期性 发送训练实现信道均衡 ,但是发 送 固定 的训练序列 占用大量的信 号带 宽,而且在一些特殊突
[ ywod mut lmo e loi m; ihod r AM ; l deu l ain err nry v r bes ps e c ntlt nmac n t n Ke r s lpe dl g rh hg re I i a t Q bi ai t ;ro eg ; ai l e —i ; o s l i t f ci n q z o e a t z eao hu o
道带 宽效应 ,会使接收信号存在信号完整性 问题 ,进而带来 较高 的误码率 。为 了减少信道对接收信号的干扰 ,需要 用信 道均衡技 术来抵 消非理 想信道 的不 良影响 。传统的信道 均衡 技术 是通 过信道 的先验知识实现信道均衡 ,但是信道的特性
一
般是未知且时变 ,因此 ,这 类技术应 用很少 。而后发展的
M o uuAloi m(M A n o s l t n ftehg -r e QA sg as T en w agrh tk steelreeg stes ps ec n o d l g r h t C )a dcnt l i so ihod r M inl. h e loi m e h lo nrya t —i o t l eao h t a ' h e z r
3 B in rn・nvreS aeT cn lg .Ld, in 0 10 C ia . e ig asu ies p c eh oo yCo, t. j g10 9 , hn ) j T Be i
[ b ta t nw aibes psz loi m rp sdt d c e eiul ro n ep aee o a sdb e s tho te ntn A srcIA e vral t —i ag rh ipo oe r u e s a err dt h s r r ue yt mac fh s t e e t s oe h t r d a h c h mi Co a
一种改进的多模盲均衡算法
算法存在的收敛速度慢的问题, 在其误差函数的基础上给出了一种改进的多模算法。 仿真结果表明, 改进算法收敛速度快, 剩余
误 差小而且能克服相位偏移 , 具有很好的 实用性 。
【 关键词】盲均衡
多模算法
收敛速度
代价 函数
中图分类号 :P 0 . 文 献标识码 : 文章编号 :0 8 1 3 (0 1 i- 9 4 T 3 16 A 1 0— 7 9 2 1) 5 5—
2算 法分 析
21恒 模算 法( MA . C )
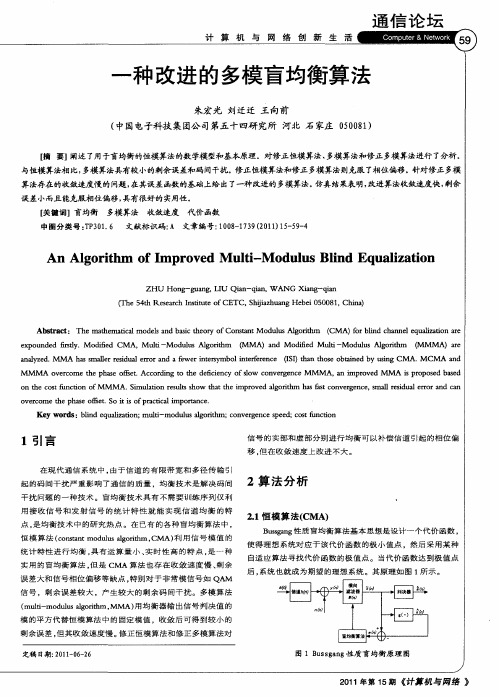
B s a g 质 盲 均衡 算法 基 本 思 想 是 设 计 一 个 代 价 函 数 , us n 性 g 使 得 理 想 系统 对 应 于 该 代价 函数 的极 小 值 点 ,然 后 采 用 某 种 自适 应 算 法 寻 找 代 价 函 数 的极 值 点 。 当 代价 函 数达 到极 值 点
M M M A ve c m e t e phae ofst o r o h s f e .Ac o dig o t e d fce y o o on r e c M M A ,a m pr v d M A sp op e s d c r n t e inc fs w c ve g n e M h i l ni oe M i r os d bae
(h 4hReerhIstt f E C, hi h agH b i 5 0 1 Ch a T e5 t s c tueo T S ia un e e 0 0 8, i ) a ni C jz n
A s a t T ema e t amo e n acte r f o s n dls loi m (MA fr l dcan l q azt nae bt c: h t ma cl dladbs oyo nt t r h i s ih C a Mo uu grh A t C ) o i hn e eula o r bn ii ep u dd isy x o n e ld .Mo ie MA, lt— d u l rh r d dC i f Mu i Mo u sAg i m l ot ( MMA n df d Mu — d u lo tm )ad Mo ie l Mo u sA grh i i t l i ( MMM A r )ae
机动目标跟踪中的多模型算法
( la a lA c de y, Dai n N va a m Dal n 6O 8, i 11 1 Chi a) a n
Ab t a t s r c :Th m u t— o l l o ihm un r o s d v l i g e lim de a g rt de g e a e e op n pr c s fom s a i mulimo l o es r t tc t— de ( SM M )t n e a tv u t— o l( M M ), r o i t r c i e m lim de I fom i e t uc ur u t- o l( fx d s r t e m lim de FSM M ) t a ibl o v ra e s r c ur u t— o l( t u t e m lim de VSM M ) Thi p r a l z s t e lmia i f FSM M l ort . s pa e na y e h i t tons o a g ihm , t i s ob a n t d a a a d o r to loc a i ns of t he a v nt ge n pe a i na c so he VSM M l ort m 。 n r uc s h s t hi g a g a g ih i t od e t e wic n l o— rt ihm h oft e VSM M , i gs f r r nd o w brn o wa d a ki f ne VSM M l ort m— — t e mi m u s — de a g ih h ni m ub mo l s t s t h ng ( SM S e wic i M S)a g ih a he s m e tm e l ort m tt a i 。
一种基于启发式搜索的快速多模式匹配算法
关 键词
B 算法 M
多模式 匹配
启发 式
平均搜 索时间
中图法分类号
TB9 .8 文献标 识码 t 30 ;
B
入侵 检测 系统 (D ) IS 作为 一种 主动 的安全 防
护技 术 , 逐渐 成为 网络安 全 领域 中研究 的一 个 热点 。
主流 的误 用 检测 技 术 是 基 于 对 攻击 特征 规 则 的
接 ; 本 T是 待查 找 的对象 。多模 式 匹配 就 是 要 在 文
T中搜 索 , 检测 T是否 包含 P中某条 规则 。
定 义 2 长模 式 分解
击模 式 的检 测 , 以 先 确 定 检 测 最 短 的 模 式 串 , 可 如
“ eit C I a . x ”, 过 比较 , 果 发 现 整个 被 S r s G m i ee 经 p/ l 如
启 发式 搜索 思 想 , 模式 树进 行多 模式 的快 速搜 对
索。
基 于上面 这一 思 想 , 文 描 述 了一 种 快 速 多模 本 式 匹配检 测 的新算 法 , 论 分析 和实 验表 明 , 规则 理 在
匹配检 测 。随着新 的攻 击 手 段 不 断 出现 , 规则 的数 量 亦不 断增 多 , 而简 单 串行 匹配 搜 索 算 法 都 具 有一
2 0 S i eh E gg 0 7 e. c . nn . T
一
种 基 于 启发 式 搜 索 的快 速 多模 式 匹 配算 法
李建辉 邓朝晖
( 南 大学 软件 学 院 ,长 沙 4 0 8 ; 州 职 业 技 术 学 院 ‘郴 州 4 3 0 ) 湖 10 2 郴 , 2 0 0
摘
要 基于误用检测 的网络入侵检测 系统中模 式 匹配技 术成为入侵 检测 系统 的瓶颈 , 了跟上快速 增长 的 网络带宽 和流 为
双模数ntt 快速数论卷积 多模数
双模数ntt 快速数论卷积多模数双模数NTT(Number Theoretic Transform)是一种基于快速数论变换的算法,用于在双模数环上进行高效的多项式乘法运算。
双模数NTT在数字信号处理、多项式插值、多项式乘法等领域得到广泛应用。
本文将介绍双模数NTT的原理和应用,以及相关的快速数论卷积和多模数NTT算法。
一、双模数NTT的原理双模数NTT是基于NTT的一种扩展,它使用两个不同的模数进行计算。
在传统的NTT中,我们使用一个质数模数p,而在双模数NTT中,我们使用两个质数模数p和q,其中q满足q=2*k*p+1,k 为整数。
这两个模数的选择是为了满足双模数NTT算法的要求。
双模数NTT的计算过程与传统的NTT类似,但需要进行额外的模运算。
首先,将输入的多项式表示为系数形式,然后将系数转换为在模p和模q下的整数。
接下来,对这些整数进行NTT变换,得到在模p和模q下的NTT结果。
最后,将两个NTT结果通过CRT(Chinese Remainder Theorem)合并,得到在双模数环下的结果。
二、双模数NTT的应用1. 数字信号处理:双模数NTT可用于高效地执行信号滤波、频谱分析和相关性计算等操作。
它在音频处理、图像处理和视频编码等领域中得到广泛应用。
2. 多项式插值:双模数NTT可以用于多项式插值问题,即给定一些离散的点,找到一个满足这些点的多项式。
通过将问题转化为多项式乘法,可以使用双模数NTT来高效地解决插值问题。
3. 多项式乘法:双模数NTT是多项式乘法的一种高效算法。
通过将多项式转换为NTT域上的向量,并利用双模数NTT进行乘法运算,可以在较短的时间内计算出多项式的乘积。
三、快速数论卷积快速数论卷积是一种利用NTT进行多项式乘法计算的高效算法。
它通过将多项式转换为NTT域上的向量,并利用NTT算法进行变换和逆变换,从而实现快速的多项式乘法。
快速数论卷积的基本思想是将多项式的乘法转化为NTT域上的向量的点积运算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多模算法简介多模式匹配在这里指的是在一个字符串中寻找多个模式字符字串的问题。
一般来说,给出一个长字符串和很多短模式字符串,如何最快最省的求出哪些模式字符串出现在长字符串中是我们所要思考的。
该算法广泛应用于关键字过滤、入侵检测、病毒检测、分词等等问题中。
多模问题一般有Trie树,AC算法,WM算法等等。
我们将首先介绍这些常见算法。
1.hash 可以单字、双字、全字、首尾字hash。
优点:简单、通常有效缺点:受最坏情况制约,空间消耗大,需要回朔。
2.字典树Trie树改进:进行穿线,参考KMP的算法,进行相同前缀匹配,建立跳转路径,避免回朔。
跳转路径建立的算法思想:如果要建立节点A ->A’ 的跳转路径需要满足:1)A = A’ 节点有相同的value值,代表同一个字2)A的深度>A’的深度3)对于A节点的父节点F,和A’节点的父节点(如果有父节点的话),有F->F’优点:无回朔,查询效率一般较高缺点:数据结构复杂难以维护,浪费空间多,建树时间长。
3.AC算法本质上来说和Trie树一样。
转向函数:建立一个根据输入字符转变状态的有限自动机失效函数:当出现状态无法根据输入字符继续走时,需要根据失效函数转化当前状态。
失效函数的建立需要满足:节点r深度之前都已建立失效函数f。
则若有g(r, a) = s,回朔r’=f( r )直至找到g(r’, a) 存在,则将f(s)=g(r’, a)。
和Trie树是一致的。
实际上,如果某状态节点r对输入字符a无路径,则可以将该节点的失效函数f( r )指向的状态节点r’的g(r’, a)作为g(r, a)。
这样在搜索中就不需要专门考虑失效节点的问题了,只需要沿着转向函数一直走。
输出函数:某状态代表着匹配某模式的结束,因此输出函数的值就是匹配成功模式的集合。
因为模式之间可能会有互包含,因此可能有多个成功匹配的模式。
AC算法比Trie树数据结构简单,因此运用广泛。
用于snort等代码中。
4.WM算法先讲BM算法。
BM算法是KMP之外的另一个单模式字符串匹配算法,其思想也很简单:假设模式串是P 主串是T, m=strlen(P),n=strlen(T),从左向右移动模式串,对于模式串的匹配, 从右向左检查, 也就是P[m-1],p[m-2]...当发现不匹配时, 使用好后缀和/或坏字符来决定模式串移动的距离通常同时使用两个来加快查找速度,当发现一个不匹配时如下:Consider a mismatch at P[n - 5]:T: mahtava talomaisema omalomailuunP: maisemaomaloma上面m != t ,这时T 中的t字符叫做坏字符,P 中的字符"aloma" 叫做好后缀坏字符算法:当出现一个坏字符时, BM算法向右移动模式串, 让模式中最靠右的对应字符与坏字符相对。
然后继续匹配。
移动距离可预先计算为delta1(x) = m - max{k|P[k] = x, 1 <= k <= m}; (x出现在P中)。
好后缀算法:如果程序匹配了一个好后缀, 并且在模式中还有另外一个相同的后缀, 那把下一个后缀移动到当前后缀位置(类似KMP 只是KMP是从左向右移动)。
移动距离delta2可预先计算为delta2(j)= {s|P[j+1..m]=P[j-s+1..m-s]) && (P[j]≠P[j-s])(j>s)}。
BM算法在查找开始时先根据模式串中所有字符建立一个坏字符表,然后创建一张好后缀表。
在匹配过程中,取max{delta1, delta2}作为实际移动的离尾部的距离,即尽量移动距离最大。
BM算法的最坏时间复杂度为O(m*n),但实际比较次数只有文本串长度的20%~30%。
可以看作是亚线性的时间复杂度算法。
WM算法的思想从BM算法思想演变而来,但是用于多模匹配中。
WM算法也是从右到左进行匹配。
WM算法有一个重要假设,假设所有的模式的字符串长度是一样的,为m。
若不一样,则按最短的那个模式长度在做匹配时截断其他的模式。
WM算法将建立三张表:SHIFT[], HASH[], PREFIX[]。
其中,SHIFT表用于决定匹配时出现失配的情况时的移动距离,类似于BM算法中的坏字符策略。
HASH和PREFIX表则用于当SHIFT表匹配成功不需要移动后,决定是否具体匹配到某个模式的问题。
SHIFT表:考虑一块大小为B的字符块,而不是单纯的一个字符。
一般取B=2或3。
SHIFT为长度为B的一切可能的字符排列都建立一个索引,因此其下标的大小就是所有可能的长度为B的排列数。
(实际上,可以通过压缩的策略将一些排列串弄到相同的空间)。
SHIFT 中每一项的值决定在文本中出现某 B 个字符组成的字符串时pattern 的移动距离,也就是在所有的pattern中出现的最右的B离pattern尾部的距离。
假设X为当前计算的B长字符块,且被hash为i,考虑两种情况:第一:X 不在任何一个pattern 中出现,我们可以将当前text考察的位置向后移动m-B+1 个字符的距离,于是我们在SHIFT[i]中存放m-B+1。
第二:X 在某些pattern 中出现,这种情况下,我们考察那些pattern 中X 出现的最右位置。
假设,X 在P[j]中的q 位置出现,且在其他的出现X 的pattern 中X 的位置都不大于q。
那么我们应该在SHIFT[i]中存放m-q。
最后我们将得到SHIFT 表,表中存放的值是我们text 中出现某一长为B 的字符串时能够移动的最大的安全距离。
当检查pos位置,得到其B块的hash值为i,当SHIFT[i]<> 0 时,pos=pos + SHIFT,跳动。
HASH表:当SHIFT[i]=0时使用。
SHIFT[i]=0时,代表匹配串当前位置的X可能匹配上了某个(某些)模式的尾部。
因此HASH[i]指向了尾部B长的字符块散列值为i的模式链表的头p。
我们可以将所有的模式以尾部B长的字符块的散列值进行排序存放在某个模式表数组中,则只需要依次递增p就可以找到所有尾部散列值为i的模式,直到p = hash[i+1],代表了该链表的尾部。
PREFIX表:当SHIFT[i]=0时,且通过HASH表列出了所有可能的模式时使用。
通过对每个模式头部B’个字符进行hash,将其散列值放在PREFIX表中。
HASH[i]中的指针同时也是指向PREFIX表的,通过比较PREFIX[p]和匹配串的头B’个字符的hash值,能够进一步确定是哪个模式匹配上了。
最终,对该模式和匹配串的每一个字符进行一一匹配确定是否匹配。
如果SHIFT[i]=0,且检查匹配完成,则pos = pos + 1,继续检查pos位置的SHIFT。
实践证明,大部分时间SHIFT都不为0,(在一个典型的例子中,对于100个模式5%的时间移动值为0,1000个模式27%的时间移动值为0,5000个模式53%的时间。
),也就代表匹配串是跳跃着前进的,因此可以达到亚线性的时间复杂度。
经过计算,复杂度为O(mp)+ O(BN/m),设N是文本的大小,P是模式的数量,m是每个模式的长度。
优点:快速,数据结构简单,实现容易。
缺点:需要所有模式长度基本相同(不能有太短的模式),不支持变长的编码,例如GB18030。
WM算法以下文章从一个论文中剪裁下来:算法其实不是很难,但是算法是通过数学模型描述的,不是很好理解哦.个人认为在多模式匹配中该算法的整体性能优于自动机算法,特别是在模式比较多的时候.再者就是自动机巨耗内存,而且启动很慢,最重要的速度本人也觉的,没有WM 算法快.本算法不提供原代码.WM算法的基本思想如下:假设模式的长度为m。
我们比较tm(文本的第m个字符)和模式的最后一个字符。
如果不匹配的话,那么我们根据tm在模式中的最右出现来决定移动的距离。
例如,如果tm在模式中没有出现,我们可以安全地移动m个字符并且查看t2m;如果tm和模式的第4个字符匹配,我们可以移动m-4,依此类推。
在自然语言文本中,移动的距离为m或接近m的情况会经常发生。
然而,对于多模匹配,会出现文本的多个字符和和一些模式的最后一个字符匹配的情况。
我们要证明怎样克服这个问题并保持WM算法的精华(速度)第一个阶段是预处理模式集合。
在这个阶段我们建立三张表,移动表(SHIFT table)、哈希表(HASH table)、前缀表(PREFIX table)。
移动表和WM算法的类似,但不完全相同。
它用来决定当文本被扫描的时候,文本中的多少个字符可以被移动(跳过)。
哈希表和前缀表是移动值为0时被使用的。
他们用来决定哪个模式是匹配的后选,并验证匹配。
我们做的第一件事情就是计算每个模式的最小长度,称为m,并且只考虑每个模式的头m个字符。
换句话说,我们强加一个要求:所有的模式都具有相同的长度。
这个要求对算法的效率是至关重要的。
假设其中一个模式非常的短,长度仅为2,那我们移动的距离就不可能超过2,所以短模式会使算法的效率降低。
移动表的建立我们考虑一块大小为B的字符串,而不是一个一个地查看文本的字符。
设M为所有模式的总的大小,M=k*m,设c 为字母表的大小。
一个好的B的取值应该是logc2M;实际上,我们取B=2或B=3。
这里的移动表和正常的BM算法的移动表(SHIFT TABLE)起相同的作用,除此之外它还决定最后B个字符的移动而不是仅仅一个字符。
例如,如果文本中一个有B个字符的字符串并不出现在任何模式中,那么我们可以移动m-B+1个字符。
我们假设现在移动表为每个可能的大小为B的字符串都包含一个入口,那么它的大小应为|∑|B。
(实际上我们使用一个压缩的表把一些字符串匹配到相同的入口以节省空间。
)每个大小为B的字符串匹配一个整数作为移动表的索引。
这些值决定了当我们扫描文本时我们能向前移动多远。
设X=x1…xB为我们当前正在扫描的文本中的B个字符,假设X和移动表的第i 个入口匹配。
这里有两种情况:1、X和任何模式中的子串都不匹配在这种情况下,我们可以移动文本的m-B+1个字符。
任何小一点的移动都会使文本的后B个字符和其中一个模式的子串不匹配。
所以我们记录移动表SHIFT[i]的值为m-B+1。
2、X出现在一些模式中在这种情况下,我们找出X在所有模式中的最右出现。
我们假设X在模式Pj的位置q处结束,并且X并不结束在任何其他模式中比q大的位置。
我们记录SHIFT[i]的值为m-q。
为了记录移动表的值,我们单独地考虑每个模式pi=a1a2…am。
我们匹配pi的每个大小为B的子串aj-B+1…aj到移动表,并且设置相应的值为当前的最小值(所有的初始值都为m-B+1)和m-j(到达这个子串需要移动的距离)。