机械原理计算自由度习题附答案
机械原理习题及答案
第1章平面机构的结构分析1.1解释下列概念1.运动副;2.机构自由度;3.机构运动简图;4.机构结构分析;5.高副低代。
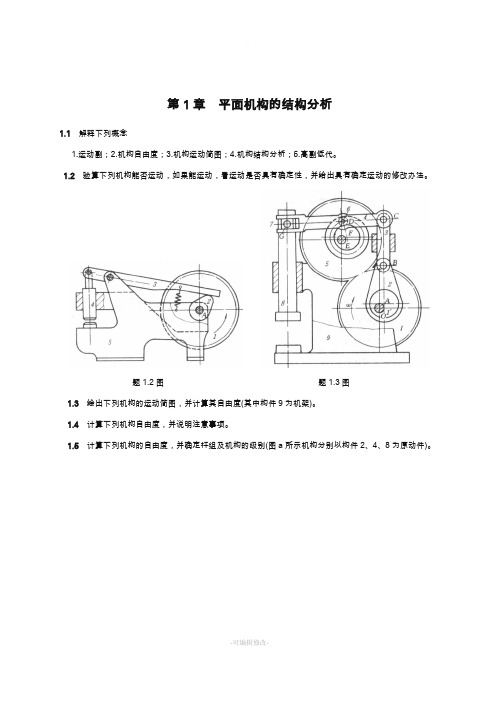
1.2验算下列机构能否运动,如果能运动,看运动是否具有确定性,并给出具有确定运动的修改办法。
题1.2图题1.3图1.3 绘出下列机构的运动简图,并计算其自由度(其中构件9为机架)。
1.4 计算下列机构自由度,并说明注意事项。
1.5计算下列机构的自由度,并确定杆组及机构的级别(图a所示机构分别以构件2、4、8为原动件)。
题1.4图题1.5图第2章平面机构的运动分析2.1试求图示各机构在图示位置时全部瞬心。
题2.1图2.2在图示机构中,已知各构件尺寸为l AB=180mm , l BC=280mm , l BD=450mm ,l CD=250mm ,l AE =120mm ,φ=30º, 构件AB上点E的速度为v E=150 mm /s ,试求该位置时C、D两点的速度及连杆2的角速度ω2。
2.3 在图示的摆动导杆机构中,已知l AB=30mm , l AC=100mm , l BD=50mm ,l DE=40mm ,φ1=45º,曲柄1以等角速度ω1=10 rad/s沿逆时针方向回转。
求D点和E点的速度和加速度及构件3的角速度和角加速度(用相对运动图解法)。
题2.2图题2.3图2.4 在图示机构中,已知l AB =50mm , l BC =200mm , x D =120mm , 原动件的位置φ1=30º, 角速度ω1=10 rad/s ,角加速度α1=0,试求机构在该位置时构件5的速度和加速度,以及构件2的角速度和角加速度。
题2.4图2.5 图示为机构的运动简图及相应的速度图和加速度图。
(1)在图示的速度、加速度多边形中注明各矢量所表示的相应的速度、加速度矢量。
(2)以给出的速度和加速度矢量为已知条件,用相对运动矢量法写出求构件上D 点的速度和加速度矢量方程。
机械原理练习及答案

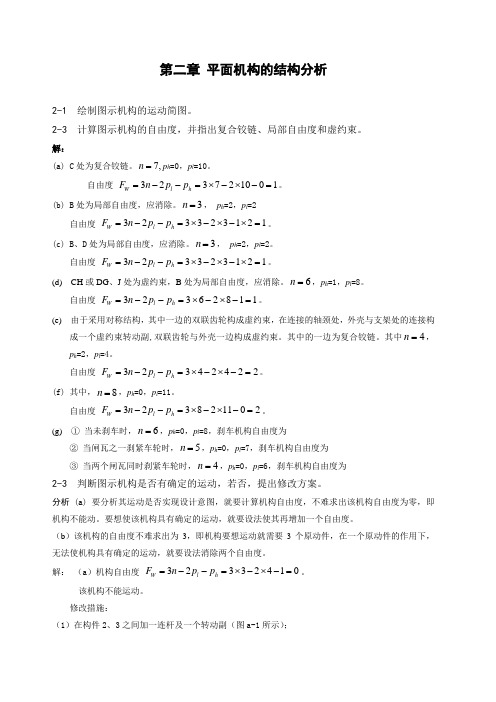
第二章 平面机构的结构分析2-1 绘制图示机构的运动简图。
B解:大腿 小腿213456(b)ACB FEDB解:ABC DE FGH解:2-3 计算图示机构的自由度,并指出复合铰链、局部自由度和虚约束。
ABCDE(a)ABDCE(b)ABCDE(c)(e)(f)(g)解:(a) C 处为复合铰链。
7,n =p h =0,p l =10。
自由度 323721001W l h F n p p =--=⨯-⨯-=。
(b) B 处为局部自由度,应消除。
3n =, p h =2,p l =2自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(c) B 、D 处为局部自由度,应消除。
3n =, p h =2,p l =2。
自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(d) CH 或DG 、J 处为虚约束,B 处为局部自由度,应消除。
6n =,p h =1,p l =8。
自由度 32362811W l h F n p p =--=⨯-⨯-=。
(e) 由于采用对称结构,其中一边的双联齿轮构成虚约束,在连接的轴颈处,外壳与支架处的连接构成一个虚约束转动副,双联齿轮与外壳一边构成虚约束。
其中的一边为复合铰链。
其中4n =,p h =2,p l =4。
自由度 32342422W l h F n p p =--=⨯-⨯-=。
(f) 其中,8n =,p h =0,p l =11。
自由度 323821102W l h F n p p =--=⨯-⨯-=。
(g) ① 当未刹车时,6n =,p h =0,p l =8,刹车机构自由度为 32362802W l h F n p p =--=⨯-⨯-=② 当闸瓦之一刹紧车轮时,5n =,p h =0,p l =7,刹车机构自由度为 32352701W l h F n p p =--=⨯-⨯-=③ 当两个闸瓦同时刹紧车轮时,4n =,p h =0,p l =6,刹车机构自由度为32342602W l h F n p p =--=⨯-⨯-=知识青年22:53:08当闸瓦之一刹紧车轮时,n=5,ph=0,pl=7,刹车机构自由度为2知识青年22:53:36自由度为1知识青年22:54:22那么左边算虚约束吗左边是机架知识青年22:54:46当两个闸瓦同时刹紧车轮时,n=4,ph=0,pl=6,刹车机构自由度为0知识青年22:55:33四个活动构件是哪些呢?1、2、3、5知识青年22:56:23HD杆就不算活动构件吗?算知识青年22:59:53四个活动构件是BA\CBD\EC\还有EFGOJHI此时算一个构件吗,而HD不算活动构件?2-3 判断图示机构是否有确定的运动,若否,提出修改方案。
机械原理习题答案
机械原理习题答案机械原理是工程学科中的一个重要分支,它涉及到机械设计、运动学和动力学等多个方面。
以下是一些机械原理习题的答案示例:习题一:平面机构的自由度计算已知一个平面机构由4个刚体组成,其中包含3个铰链和2个滑动接头。
求该机构的自由度。
答案:根据格伯尔定理,平面机构的自由度计算公式为:\[ F = 3n - 2j - h \]其中,\( n \) 是刚体的数量,\( j \) 是铰链的数量,\( h \) 是滑动接头的数量。
将已知数值代入公式:\[ F = 3 \times 4 - 2 \times 3 - 2 = 12 - 6 - 2 = 4 \]所以,该机构的自由度为4。
习题二:四连杆机构的运动分析考虑一个四连杆机构,其中杆AB和CD固定,杆BC和AD为活动杆。
求当杆AD的长度为L时,杆BC的位移和速度。
答案:设杆AD的长度为\( L \),杆BC的长度为\( l \)。
根据四连杆机构的几何关系,可以得出杆BC的位移和速度的表达式。
位移表达式:\[ s_{BC} = l \sin(\theta) \]其中,\( \theta \) 是杆AD与杆AB之间的夹角。
速度表达式:\[ v_{BC} = l \cos(\theta) \cdot \omega \]其中,\( \omega \) 是杆AD的角速度。
习题三:齿轮传动的传动比计算已知一对齿轮,主动轮的齿数为20,从动轮的齿数为100。
求传动比。
答案:齿轮传动比的计算公式为:\[ i = \frac{N_2}{N_1} \]其中,\( N_1 \) 是主动轮的齿数,\( N_2 \) 是从动轮的齿数。
代入已知数值:\[ i = \frac{100}{20} = 5 \]所以,传动比为5。
习题四:凸轮机构的从动件运动规律分析考虑一个凸轮机构,凸轮为圆形,半径为R。
从动件在凸轮的上升过程中以匀速运动。
求从动件在凸轮上升过程中的位移和速度。
答案:假设凸轮以角速度\( \omega \) 旋转,凸轮上升的角度为\( \theta \),则从动件的位移表达式为:\[ s = R \theta \]速度表达式为:\[ v = R \omega \]习题五:机械振动的自由振动分析已知一个单自由度振动系统,其质量为\( m \),刚度系数为\( k \),初始位移为\( A \),初始速度为0。
机械原理习题及答案
理论廓线
x = (s0+s)sinδ+ ecosδ y = (s0+s)cosδ- esinδ
实际廓线
x’= x- rrcosθ y’= y-rrsinθ
sin dx d
dx d
2
dy d
2
cos dy d
dx d
2
第2章 平面机构的结构分析
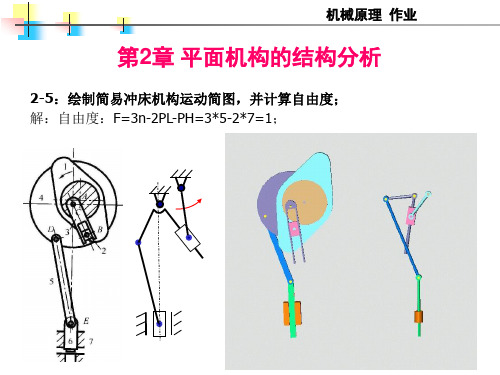
2-9:如图所示一简易冲床的初步设计方案, 解:自由度:F=3n-2PL-PH=3*3-2*4-1=0;
机构不能动; 增加一个构件一个低副;
移动副比转动副结构复杂
机械原理 作业
第3章 平面连杆机构
3-11:已知铰链四杆机构各杆长l1=28,l2=52,l3=50,l4=72mm,试求: (1) 取杆4为机架,该机构的极位夹角θ、杆3的最大摆角φ、最小传动角γmin 和行程速比系数K;
设计步骤:
B
①任取一点A,作偏距线e; ②以A为圆心,l2-l1和l1+l2为半径作圆;
A
eα
C
交圆弧于C1,C2点;
③ H=C1C2=40;
④θ=5°;
⑤α=25° 压力角:作用在从动件上的驱动力F与力作用点绝对速度间所夹锐角。
F F
A
θα
e
C1 H
C2
机械原理 作业
第3章 平面连杆机构
3-13:求各机构全部瞬心。
机械原理 作业
第5章 齿轮机构
5-30:已知,基圆半径rb=50mm。求:
(1)当渐开线的展角θk=100时,渐开线的压力角αk,向径rk和曲率半径ρk;
(2)当rk=65mm,渐开线的压力角αk数值和展角θk;
机械原理课后习题答案

《机械原理》课后习题答案第2章(P27)2-2 计算下列机构的自由度,如遇有复合铰链、局部自由度、虚约束等加以说明。
(a)n=3,p l=3 F=3*3-2*3=3(b)n=3,p l=3,p h=2 F=3*3-2*3-2=1 (B处有局部自由度)(c)n=7,p l=10 F=3*7-2*10=1(d)n=4,p l=4,p h=2 F=3*4-2*4-2=2 (A处有复合铰链)(e)n=3,p l=4 F=3*3-2*4=1 (A或D处有虚约束)(f)n=3,p l=4 F=3*3-2*4=1 (构件4和转动副E、F引入虚约束)(g)n=3,p l=5 F=(3-1)*3-(2-1)*5=1 (有公共约束)(h)n=9,p l=12,p h=2 F=3*9-2*12-2=1 (M处有复合铰链,C处有局部自由度)2-3 计算下列机构的自由度,拆杆组并确定机构的级别。
(a)n=5,p l=7 F=3*5-2*7=1由于组成该机构的基本杆组的最高级别为Ⅱ级杆组,故此机构为Ⅱ级机构。
(b)n=5,p l=7 F=3*5-2*7=1此机构为Ⅱ级机构。
(c)n=5,p l=7 F=3*5-2*7=1拆分时只须将主动件拆下,其它构件组成一个Ⅲ级杆组,故此机构为Ⅲ级机构。
2-4 验算下列运动链的运动是否确定,并提出具有确定运动的修改方案。
(a)n=3,p l=4,p h=1 F=3*3-2*4-1=0 该运动链不能运动。
修改方案如下图所示:(b)n=4,p l=6 F=3*4-2*6=0 该运动链不能运动。
修改方案如下图所示:或第3章(P42)3-2 下列机构中,已知机构尺寸,求在图示位置时的所有瞬心。
(a)(b)(c)(a) v3=v P13=ω1P14P13μl3-6 在图示齿轮连杆机构中,三个圆互作纯滚,试利用相对瞬心P13来讨论轮1与轮3的传动比i13。
第5章(P80)5-2 一铰接四杆机构(2)机构的两极限位置如下图:(3)传动角最大和最小位置如下图:5-3题略解:若使其成为曲柄摇杆机构,则最短杆必为连架杆,即a 为最短杆。
自由度计算机械原理!
B 1 E
2 3 6 F D E' H 7 O 8
4 G 5
A
9
图3-18 (b)
由此得,n=7,PL=9,PH=1。其自由度为: F=3n-2PL-PH=37-29-1=2 因此机构有两个原动件,其自由度 等于2,所以具有确定的运动。
求大筛机构的自由度F=?
C B 1 E 2 3 6 F D E' H 7 O 8 9 4 G 5
A
求大筛机构的自由度F=?
复合铰链 C 2 3 1 E 主动件1,8 4
B
6
F 7
D E' H
G O 8
5
A
9 局部自由度
两者之一为虚约束
B 1 E
2 3 6 F
C
4
7 O 8
9
G
5
A
D E' H
B 1 E
2 3 6 F D E' H 7 O 8
4 G 5
A
9
n=? Ph=? Pl=?
n=7
Ph=1
Pl=9
F=37-(2 9+1)=2
F=3n-2PL-PH=36-28-1=1
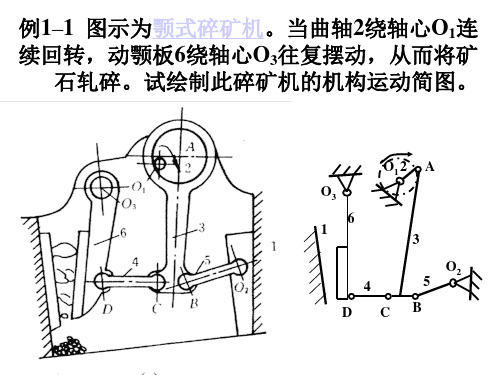
例3-5 试计算图3-18a)所示的大筛机 构的自由度,并判断它是否有确定的 运动。
图3-18 大筛机构
解: 机构中的滚子有一个局部自由度。 顶杆与机架在E和E’组成两个导路平 行的移动副,其中之一为虚约束。 C处是复合铰链。
将滚子与顶杆焊成一体,去掉移动 副 E’ ,并在 C 点注明回转副的个数,如 图3-18b)所示:
F 5 4 C 矿石 B 2 D 3 E A 主动件1
n=5;
pl
ph
机械原理习题集答案
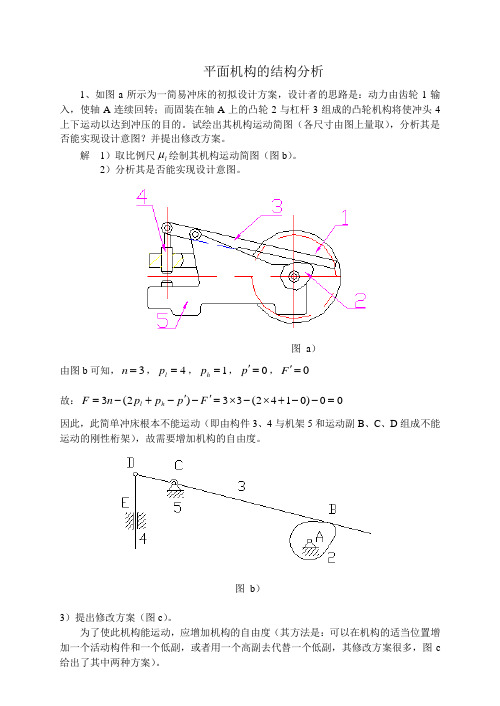
平面机构的结构分析1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。
2)分析其是否能实现设计意图。
图 a ) 由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
图 b )3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案)。
图 c1) 图 c2)2、试画出图示平面机构的运动简图,并计算其自由度。
图a )解:3=n ,4=l p ,0=h p ,123=--=h l p p n F图 b )解:4=n ,5=l p ,1=h p ,123=--=h l p p n F3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
3-1解3-1:7=n ,10=l p ,0=h p ,123=--=h l p p n F ,C 、E 复合铰链。
3-2解3-2:8=n ,11=l p ,1=h p ,123=--=h l p p n F ,局部自由度3-3 解3-3:9=n ,12=l p ,2=h p ,123=--=h l p p n F4、试计算图示精压机的自由度解:10=n ,15=l p ,0=h p 解:11=n ,17=l p ,0=h p13305232=⨯-+⨯='-'+'='n p p p h l 26310232=⨯-⨯='-'+'='n p p p h l0='F 0='FF p p p n F h l '-'-+-=)2(3 F p p p n F h l '-'-+-=)2(310)10152(103=--+⨯-⨯= 10)20172(113=--+⨯-⨯=(其中E 、D 及H 均为复合铰链) (其中C 、F 、K 均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。
机械原理习题及答案 (2)
第二章 平面机构的结构分析2-1 绘制图示机构的运动简图。
2-3 计算图示机构的自由度,并指出复合铰链、局部自由度和虚约束。
解:(a) C 处为复合铰链。
7,n =p h =0,p l =10。
自由度 323721001W l h F n p p =--=⨯-⨯-=。
(b) B 处为局部自由度,应消除。
3n =, p h =2,p l =2自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(c) B 、D 处为局部自由度,应消除。
3n =, p h =2,p l =2。
自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(d) CH 或DG 、J 处为虚约束,B 处为局部自由度,应消除。
6n =,p h =1,p l =8。
自由度 32362811W l h F n p p =--=⨯-⨯-=。
(e) 由于采用对称结构,其中一边的双联齿轮构成虚约束,在连接的轴颈处,外壳与支架处的连接构成一个虚约束转动副,双联齿轮与外壳一边构成虚约束。
其中的一边为复合铰链。
其中4n =,p h =2,p l =4。
自由度 32342422W l h F n p p =--=⨯-⨯-=。
(f) 其中,8n =,p h =0,p l =11。
自由度 323821102W l h F n p p =--=⨯-⨯-=。
(g) ① 当未刹车时,6n =,p h =0,p l =8,刹车机构自由度为② 当闸瓦之一刹紧车轮时,5n =,p h =0,p l =7,刹车机构自由度为③ 当两个闸瓦同时刹紧车轮时,4n =,p h =0,p l =6,刹车机构自由度为2-3 判断图示机构是否有确定的运动,若否,提出修改方案。
分析 (a) 要分析其运动是否实现设计意图,就要计算机构自由度,不难求出该机构自由度为零,即机构不能动。
要想使该机构具有确定的运动,就要设法使其再增加一个自由度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
计算齿轮机构的自由度1.C
B
3
A
2
4
1
定轴轮系
副去除。
即如下C解:由于B. C 副中之一为虚约束,计算机构自由度时,应将图所示:
12??1??p??3?3?232?F3n?p该机构的自由度h1
机构具有确定运动的条件是什么?如果不能满足这一条件,将会产生什么结果?2.D
G
C
E
B
HA
F
22
2-图
B处有一个局部自由度,应去除。
机构在滚子?3n?2p?p?3?F5?2?7?1?0该机构的自由度h1.当自由度F=1时,该机构才能运动,如果不能满足这一条件,该机构无法运动。
该机构当修改为下图机构,则机构可动:
N=4, PL=5, Ph=1。
F?3?4?2?5?1?1自由度
3. 计算机构的自由度.
1)由于机构具有虚约束, 机构可转化为下图机构。
F?3?4?2?5?1?1自由度
2)由于机构具有虚约束, 机构可转化为下图机构。
F?3?1?2?1?1自由度
3)由于机构具有虚约束, 机构可转化为下图机构。
F?3?3?2?4?1自由度。