多轴运动控制器在转台控制系统中的应用
可编程多轴控制器在转台误差补偿中的应用
维普资讯 《 装备制造源自术)07 20 年第 1 期 0维普资讯
《 装备制造技术}0 7 20 年第 l 期 O
可 编 程 多 轴 控 制 器 在 转 台 误 差 补 偿 中的 应 用
路 燕 , 锐 樊
( 北京航空航天大学 机械工程及 自动化学院 , 北京 10 8 ) 00 3
摘要 : 研究 了可编程多轴控制 ̄( MA ) 转台误差补偿 中的作 用, P C在 介绍 了 P C在运动控制 中的优点, MA 就转台误差 来源进行 分析 ; 设计 上住机误差补偿模块 。 明如何利用 P AC动 态链接库技术 实现上住机与下住机 的通讯。 并说 M 实践证明 , 应用 P AC作 为下住机使转 台控 M
响 因素。
21 指 向误 差 .
1 MA P C简 介
美国 D l a e mT u公司于 19 90年推 出的 P C可 编程多轴 MA 运 动控制器 , 是一种基于工控 P C机和 WI D WS 作系统 的 NO 操
多轴 、多通道开放 式运 动控制器。该产 品使用高速 D P 6 0 S501
被广泛应用 于各种伺服控制 系统 中。
2 三 轴转 台误差 来源分 析
三轴转 台误差 主要包括三大项 : 向误差 、 指 速率稳定 度误 差 和幅相误差嘲 这是 就转 台系统本身而言 , 。 另外三轴转 台误差 补偿过程还受误差监 测 、 现场标 定 、 环境 温度湿度等很多外界 因素影响。 本文仅分析转台本身的指向误差及现场标定误差影
D Ih,+ u d r epiC +B d e 等在 Widw 平台上制 定用户 专用 界面 ; no s
驱动时的力矩不平衡等因素有关。该误差很小可忽略不计; ②
基于PMAC的大惯量转台运动控制系统研究

④ 支持多种高 级语 言,用r 可以使用 V 、V 、C 1 B C H 等 爵 言 在 Wi hw m Js平 台 I编 写 用 户 专 用 界 而 ; 罾 P C提 : MA
收氇 日期 :2 — 1 一3 ∞6 O
电机 2 里碱建器 3 向机 T 方
4回转托 槊 5回转支撑
维普资讯
试验 结 表嘲 系 统艰 好地摘 足了转台 寅町运 动控制的 要求 点 转 台;运动 拄徊 系统
中围分 类号 :T 7 M5 1 文献标 识码 :A 立章 蟪号 :10 9 9 2 0 10 — 0 8 ( o 4 言
一
供 r 含 建 度 l 速 度 前馈 的 PD 控 制 和 阶 式 滤 放 器 , 电 包 力 口 I
设 计 中 最 为 芫键 的 部 丹 。 本 文 介 绍 了 一 种 基 于 P C 的 大 MA
bO点 都由软件来控 制,只要 使用指针 变量 指向某一 IO ' /
地 址 .就 町 “ 方 便 地 通 过 该 指 针 变 量 对 该 I0 点 进 行 输 人 / 或 输 控 制 。
惯 醚转 青运 动控 制系统的埂汁 .并进行 了宴物 试驻,试验
字 IO扩 展 卡 ,用 于 接 受 并行 码盘 的 数 据 并 反 馈 给 P C / MA , AC8 C 一 P为 模 拟 量 连 接 扩 展 卡 ,用 于 连 接 伺 服 驱 动 器 ,输 出模 拟 转 速 信 号 并将 电机 轴 码 盘 的 A、B、Z脉 冲信 号反 馈 给P C MA 。伺 服 电 机 选 用 永 磁 同 步 交 流 伺 服 电机 ,电 机 轴 安 装 有 20 5 0线 的 增 量 光 电 编 码 器 ;伺 服 驱 动 器 选 用 桂 林 星 辰 电 力 电 子有 限公 司开 发 的 N S交 流 伺 服 系 统 。 伺 服 控 A
基于可编程多轴控制器(PMAC)三轴转台伺服控制系统设计

Ke wo d : l s d l o o to ; r g a y r s co e -o p c n r l p o r mma l mu t a i o t o lr t r e a i t r t b e P D be li x sc n r l ;h e - x s u n a l ; I — e
HUANG eq a LI W e i W iu n, U ni a
( l g fAu o t n H a b n En i e r g Un v r i , a b n 1 0 0l Ch n ) Co l e o t ma i , r i gn e i ie st H r i 5 0 , i a e o n y
Ab ta t Th l s d l o o t o y t m f t r e a i t r t b e s r c : e co e —o p c n r l s se o h e - x s u n a l ,wh c a e n p o r mma l u t a i c n r l r ih b s d o r g a b e m li x s o t o l — e ( PM AC) ,ma e h p ia n o e s t ea g l rp sto e s ra d t e b u h e s DC mo o st e t r u e v — k st e o tc l c d ra h n u a o iin s n o n h r s ls t ra h o q e s r o mo e t r s s e d r c l rv n h a i g r t t n o y t m i ty d ii g t e l d n o a i .Th o b e l o o to ta e y o h p e n c t n i u e O r — e o o ed u l - p c n r l r t g n t es e d a d l a i s d t e o s o o s aie t e f n t n ft r t b ea t ma i t s y t m u h a c t n e o iy wi g n h e v o to u c in . l h u c i s o u n a l u o t e ts s e s c sl a i ,v lct .s n ,a d t e s r o c n r l n t s z o c o o f o Th r c ia p r t n i d c t st a h smo i n c n r l y t m a e h e u r me t fr a— i u n a l o t o , e p a t l e a i ia e h tt i c o o n t o to s e c n me tt er q ie n e l met r t b e c n r l o s o t
MAST多轴模拟振动台系统-MTSSystemsCorporation

11
耐用、免维护的旋转作动缸,配备低摩擦零隙 轴承
旋转作动缸
MTS 旋转作动缸被设计了较高的倾斜 角,以适应 MAST 测试经常需要的大 横摇和投掷角度。高刚度和最小化的 质量确保了更高的性能以及更大的频 率操作范围。MTS 旋转作动缸采用 超大尺寸,以便提供额外的过载保 护,而它的特殊轴承则能延长使用寿 命,提供最小摩擦和零间隙。它们能 在各种不同的温度条件下正常运行, 并且几乎无需维护。
高保真振动模拟
准确并且可重复的振动测试为汽车、航空航天、土木工程和其他领域的工程师 提供了所需的数据,以创造更安全、更可靠并且更舒适的车辆和结构。多轴振 动测试能对富有挑战并且经常不可预知的现实操作环境进行实际模拟(要求精 确的控制、精密的测试设计以及综合数据分析)。
3 拥有超过 30 年的丰富经验,MTS 是多轴振动模拟台设计和供应领域的行业领 导者,其产品适用于对地面车辆和其他结构的部件和组件进行异响、模态以及 耐久性测试。我们已为全世界的众多组织设计和交付了超过 100 套系统,其中 包括标准和定制设计。在创新模拟技术、完善的专业知识以及响应服务方面, 我们远超其他任何供应商。
循环扫描函数发生器为异响测试提供频率和振幅可调正弦三角形和方波命令以及正弦扫描驻留点动增量和目标频率函数随机函数发生器生成频带和rms调的信号可以被频率加权以进行样品鉴定和评估样品频率响应时间历史回放允许下载和播放rpc驾驶和路面文件以进行耐久性测试特别的路面异响测试以及驾乘舒适度测试15领先的应用程序软件mts通过广泛的应用程序软件来补充它的mast系统产品这些应用程序软件拥有满足全方位模拟要求从标准要求到特别要求所需的能力和功能
MTS 已为全世界的众多组织设计 和交付了超过 100 套 MAST 系统, 包括标准和定制设计系统。
仿真转台内部独立式运动控制卡的研究与实现

机 的运 动。所 以运 动控 制器是计算 机与伺服 电机的连接桥梁 。
2 设 计 依 据
它 的输入 接收光 电码盘 的单 端或差 动信号 , 对位置 信号进 行采集 , 通过适当的算法控制电机的运动 , 同时 与主机进行参数
维普资讯
・
2 4・
《 测控技术)07 第 2 )0年 2 6卷第 3 期
Байду номын сангаас
仿真转 台 内部独立式运动控制卡的研究与实现
崔高嵩
( 京瑞赛科技有 限公 司, 北 北京 10 2 ) 00 2
摘要 : 介绍 了一种独立式 多轴运动控制 器, 并对其工作 原理和工作方式进行 了分析 。此运动控制卡具有 集成度 高、 功耗低 、
程 如 图 1所示 。
备、 印刷机 械等设备 上。特别是 最适用 于非标 准设 备 的快速开 发 , 有非 常好 的发展 和经济效益 前景 。 具
目前 , 由于 以嵌入式 C U为代表的高速 高性能专用微 处理 P 器的 出现和 P C机的广 泛普 及廉价 化 , 开放式 运动 控制 器 的发
接 口简单等优点 , 可以更好地满足各种转 台的灵活性 、 实时性要 求 。该卡采 用独立 式结 构 , 直接安装在 台体 内部 , 于野外 适
使 用。
关键词 : 飞行 仿 真 转 台运 动 控 制 ; 动控 制 器 ;I 服 控 制 运 PD伺 中 图 分 类 号 :P 9 T2 文献标识码 : A 文章 编 号 :0 0— 8 9 20 ) 3- 0 4— 3 10 82 ( 0 7 0 0 2 0
Ke r s moi n c n r l f ih i lt r moin c n r l r P D ev o t l y wo d : t o t g tsmu ao ; t o t l ; I s r o c n r o o of l o oe o
数控转台结构原理

数控转台结构原理
数控转台(NC Machine Tool)是一种自动化机床,通过电子计算机和相关控制系统控制其工作,实现复杂的切削加工操作。
数控转台是由工作台、主轴头、刀库和刀具、伺服电机和控制系统等组成,其中伺服电机和控制系统是整个控制系统的关键部分。
工作台是数控转台的主要部分,它通常采用液压、气动、电机等方式驱动,使其上下左右运动,完成工件的装夹、定位和加工。
主轴头是数控转台的机床核心,旋转主轴可实现工件的加工操作,例如钻孔、铰孔、攻丝、切槽等。
刀具库是数控转台重要的附件,用于存放各种规格的刀具,工作时可以根据需要选择不同的刀具,以适应不同的加工要求。
伺服电机是数控转台的重要部分之一,它负责驱动工作台和主轴头的运动,根据计算机程序指令来控制伺服电机的运动相位和频率,从而精确控制加工过程中的移动速度和位置。
控制系统可以通过计算机控制、伺服系统、编码器和测量传感器等方式,实现工作台和主轴头的精确移动和定位,以便保证加工过程的精确性和质量。
总之,数控转台主要由工作台、主轴头,刀具库,伺服电机和控制系统等部分组成,在工厂生产线的加工中,数控转台具有良好的加工精度、生产效率和可靠性,受到广泛应用。
转台设计指导书

我们为您定制个性化转台,满足您一切需求
购买转台请发E-mail:wangyi#(#换成@)
第1章 转台总体设计
1.1 转台结构类型选择
转台是一种重要的地面测试设备,用于惯性导航系统和惯性元件检定、标定,以及模拟 飞行器姿态运动。 转台根据用途可分为仿真转台和惯性测试转台。但目前两个类别间互相渗透的趋势愈发 显著, 界限日趋上移,直到中高端产品才区别明显。 惯性测试转台,侧重静态或稳态性能,主要用于惯性导航系统和惯性元件如陀螺、加速 度计的性能检测和标定。先进武器系统一般配备有惯性导航和制导系统, 这类装置在生产、 调试、测评、使用、维护(修)等各个阶段都离不开由惯性测试转台组成的测试系统。因此, 惯 性测试性能的好坏, 直接影响武器系统研制水平及其性能评定。 仿真转台,侧重动态性能,仿真转台一般用于武器平台或运动载体的运动状态模拟 , 是 各类武器平台进行半实物仿真试验等地面综合性试验系统的关键设备和重要组成部分, 也是 测试、评价和标定各类运动载体、武器系统性能的经济、高效的技术手段。 转台按照不同的分类标准有多种类型。
购买转台请发E-mail:wangyi#(#换成@)
转台设计 课程设计指导书
哈尔滨工业大学
2011 年 4 月
我们为您定制个性化转台gyi#(#换成@)
目 录
第 1 章 转台总体设计 ....................................................................................................................... 1 1.1 转台结构类型选择 ..................................................................
Q02 PLC控制伺服电动机系统在机床转台上的应用
二 Z
轴承
2 1 年4 0 2 期
CN 41—1 4 / H Be rng201 , 18 T a i 2 No. 4
Q 2P C控制伺服 电动机 系统在机床转 台上 的应用 0 L
邹 波 ’
(. 1 成都重型轴承研 究所 , 成都 6 0 3 ;. 10 12 成都科华重型轴承有限公 司, 成都 60 0 ) 130
上 的感应 开 关 检 验 是 否 超 过 行 程 , 成 转 台 运 动 形
服控制器采用 M R— 2 , JS 可以使 用脉冲加方 向的 输入方式及 R 22和 R 42的通信方式。 S3 S2 由于定 位模块 Q 7 P D 0 4采 用 开环 脉 冲输 出 ( 4
轴 开路集 电极 输 出型 ) 无 法对 系 统 中 的伺 服 电动 ,
为 了提 高 机 床 设 备 精 度 和 实 现 自动 化 控 制 , P C和 伺服 系统 被 广泛 运 用 于 各种 数 控 机 床 和转 L
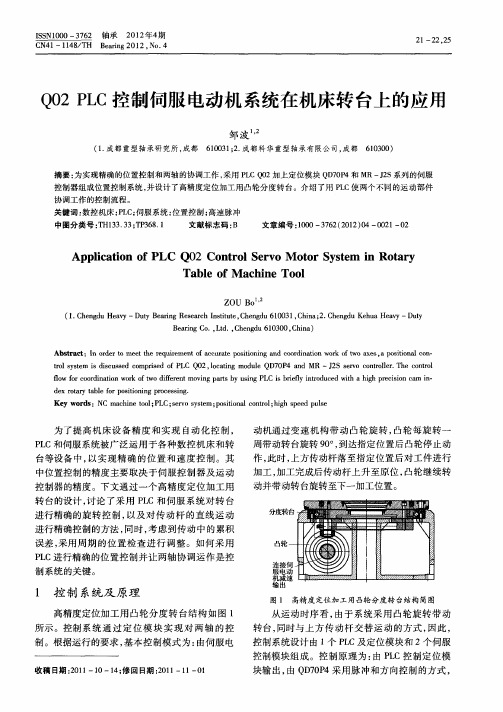
动机 通 过变 速 机 构 带 动 凸轮 旋 转 , 凸轮 每 旋 转 一 周带 动转 台旋 转 9 。到达 指定 位 置后 凸 轮停 止动 0, 作 , 时, 此 上方 传 动杆落 至 指 定位 置 后对 工 件进 行 加工 , 工完成 后 传动 杆 上升 至 原位 , 加 凸轮 继续 转 动并 带 动转 台旋转 至下 一加 工位 置 。
台等设备 中, 以实现精确 的位 置和速度控制。其
中位 置控 制 的精度 主要 取 决 于 伺 服控 制 器 及 运动
控制器的精度 。下文通过一个高精度定位加工用 转台的设计 , 讨论 了采用 P C和伺服 系统对转 台 L 进行精确的旋转控制 , 以及对传 动杆 的直线运动 进行精确控制的方法 , 同时 , 考虑到传动 中的累积 误差 , 采用 周 期 的 位 置 检 查 进 行 调 整 。如 何 采 用
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
随着自动控制理论和数字计算机及其应用技术的不断发展,以计算机为基础的控制技术迅猛发展,被控对象规模更大,控制过程和规律也更加复杂和精密,控制方法也更加灵活多样[1]。
在转台的控制系统中,除了用来产生输入信号的仿真机之外,计算机还扮演了控制器的角色。
根据控制器的不同形式,计算机控制系统分为集中式、分布式、集散式三种类型,其中集散式控制器又分为PC机与单片机、PC机与PC机、PC机与嵌入式控制器三种形式。
转台运动控制系统是转台设计中最为关键的部分,本课题中选用PC机与嵌入式控制器的形式,其中PC机采用性能稳定的IPC(工控机),嵌入式控制器选用美国DeltaTau公司的可编程多轴控制器PMAC,即IPC+PMAC。
1转台的基本结构与组成由于各种民用、军用飞行器技术的快速发展,当今世界各国都十分重视半实物仿真技术的研究和应用,而三轴转台是半实物仿真的重要设备之一[2]。
通常,三轴转台提供模拟飞行器飞行姿态角和为被试件提供测试条件的功能,以便验证全数字仿真的实验结果并进一步优化或改良飞行器设计方案。
转台负载放在内框之上,由平板固定,内框、中框和外框均可绕其轴向做360°旋转运动,可以模拟飞行器的3个自由度的横滚、俯仰和航向运动。
三轴转台由控制部分和机械部分组成,转台的控制部分由一个控制柜和一台IPC组成,转台机械结构由框架结构、动力源、支承结构、驱动方式、轴系结构、配重方式等组成。
本课题中的转台采用UOO结构,外框架采用音叉形式(U型),其结构简单,转动惯量小,并可相应缩小转台总体尺寸;中框架和内框架采用封闭框形式(O型),易于实现整圈旋转。
转台的3个轴系均采用精密机械轴承支撑,直流无刷电机驱动,运用海德汉增量式编码器进行速度、位置反馈,并在每轴运用滑环进行导线转接,可使框体做无限旋转运动。
2PMAC控制器简介PMAC(Programmable Multi-Axis Controller)是美国Delta -Tau公司生产的系列运动控制器。
使用Motorola的DSP56000系列芯片作为CPU,最多可实现8轴的伺服控多轴运动控制器在转台控制系统中的应用王海涌,张为玮,王卫(北京航空航天大学宇航学院,北京100083)摘要:提出了一种基于多轴运动控制器的转台控制系统的组成方案.给出了转台的基本组成,介绍了多轴运动控制卡功能及其硬软件的开放性。
分析了控制系统的组成原理,详细介绍了控制系统总体设计方案和基本的硬件配置结构,以及此控制系统的软件设计方法和功能实现。
通过此基于多轴运动控制卡的控制系统实现了转台的实时控制及伺服控制。
关键词:多轴运动控制器;转台;运动控制系统中图分类号:TP271文献标识码:AUsing PMAC in motion control system of turntableWANG Hai Yong,ZHANG Wei Wei,WANG Wei(School of Aerospace,Beijing University of Aeronautics and Astronautics,Beijing100083,China)Abstract:Three-axis turntable motion control system with PMAC(Programmable Multi-Axis Controller)is proposed.It intro-duces the design of turntable,and it introduces the functions and opening of the PMAC.This paper analyzes the basic theory of control system.It briefly introduces the overall design scheme and basic hardware configuration of the control system,and explains its software design method and function realization in detail.Through the control system the turntable achieves real-time control and servo control.Key words:PMAC;turntable;motion control system97《电子技术应用》2010年第3期制。
具有良好的硬件开放性和软件开放性[3]。
2.1PMAC的硬件开放性PMAC支持多种工作平台,允许在PC、STD、VME、PCI等不同总线上运行,方便了用户选择主机类型;有模拟和数字两种伺服接口,能与步进电机、直流伺服电机、交流伺服电机等多种电机连接,并可对不同的电机提供相应的控制信号;可接受各种检测元件的反馈信息,包括测速发电机、光电编码器、光栅、旋转变压器等;提供串行方式、并行方式和双端口RAM方式与PC机进行双向通信;绝大部分地址向用户开放,包括电机信息、坐标信息及各种保护信息,这些硬件的开放性使用户可以很方便地根据自己的需要进行硬件设备的搭建。
2.2PMAC的软件开放性PMAC支持各种高级语言,用户可以使用VB、VC、Delphi等在Windows软件平台上制定用户专用界面;PMAC提供了包含速度和加速度前馈的PID控制和阶式滤波器,电机和负载的双编码器,能纳入用户开发的伺服算法。
PMAC具有很强的计算能力,许多数学、逻辑和超越函数的计算都能通过用户程序中的变量和常数进行;内含可编程逻辑控制器。
PMAC的I/O点可以扩展至2018位,所有的I/O点都由软件来控制,只要使用一个类似高级程序中的指针变量指向某一I/O地址,就可以方便地在运动程序和PLC程序中通过该指针变量来对该I/O点进行输入或输出控制。
同时该PLC工具有强大的逻辑功能和判断能力,可编制复杂的逻辑关系。
3控制系统的介绍3.1控制系统的原理对于转台的方位控制,首先通过GPS等得到目标点的方位坐标,经过IPC机计算出目标点的方位角度,把位置信号送入PMAC卡,通过绝对式光电码盘形成闭环,从而达到位置伺服目的,包括速度环和位置环两部分,其控制原理如图1所示。
其中速度环由直流脉宽伺服系统、直流力矩电机以及测速电机构成,测速电机与直流力矩电机同轴并反馈成与转速成正比的电压信号,至直流脉宽伺服系统,从而形成速度闭环。
位置环由PMAC卡、直流脉宽伺服系统、直流力矩电机、光电码盘构成,光电码盘与直流力矩电机同轴并反馈位置信号至PMAC卡,从而形成位置闭环,以实现动态目标跟踪的目的,3.2控制系统的硬件组成为了提高系统的运动可靠性和快速响应能力,转台采用上下位机的两级控制方式,其硬件组成如图2所示。
其中上位机主要根据控制规律进行计算、处理、逻辑判断和存储,实现转台控制的集中监控、综合管理,主要实现系统实时在线综合管理、性能检测、安全保护及监控管理以及数据采集与处理功能。
在转台系统运行过程中,上位机完成转台系统性能参数的图形显示、数据处理,得出系统工作所必需的指令和参数。
由于工业控制计算机抗震性和抗干扰能力强,工作可靠性高,目前被广泛用于现场数据采集处理及伺服系统的上位计算机。
本系统采用研华工控机作为上位机,集中控制多套伺服系统。
下位机是转台控制系统的直接控制级,构成转台内、中、外框三个独立的伺服控制回路。
下位机完成伺服控制系统的数据采集与处理、控制律的实施并实现与上位机实时通信。
本系统中下位机由PMAC充当,PMAC 控制卡通过标准总线与上位机相联,码盘等测速或测角机构通过PMAC上的DD接口传递位置、速度等信息,经PMAC处理,并按上位机给出的控制要求通过PMAC上的DA接口输出合适的电平信号控制转台上的电机运动,从而构成控制闭环。
98《电子技术应用》2010年第3期欢迎网上投稿另外,PMAC通过总线向上位机交换报告转台位置、运行安全等信息,并从上位机获得程序运行所需要的命令,如程序开始、结束和系统复位等。
由于PMAC自身的特性,使诸如码盘信号换算、行程限位等功能可以很方便地实现,且PMAC的可编程特性使系统具有很强的扩展能力,整个系统构成要比普通的上下位机系统显得简单实用。
而PMAC的使用也使系统更具通用性,只需作少量调整即可应用于其他设备。
4运动控制系统软件设计本课题中下位机选用PMAC运动控制卡。
该运动控制卡是现在使用的比较普遍、可靠性很高的多轴运动控制器,它的核心硬件是DSP与FPGA,提供运动控制、逻辑控制、数据采集、信息处理、同主机交互等强大的资源,其最大的特点是软硬件的开放性。
PMAC可以通过执行软件(PEWIN)实现各种控制的基本操作及系统调试,从而实现执行运动程序、执行PLC程序、伺服环更新、资源管理等主要功能。
对于转台的控制系统,系统功能实现实际由工控机和PMAC卡共同分担完成,运动控制软件包括2个部分:工控机主要完成人机界面、系统任务管理、视频显示、方位角度计算与发送等功能;MAC卡主要实现所要求的运动控制、I/O管理、PLC等功能。
4.1上位机控制软件的开发对于转台控制系统上位机的工控机,基于Windows XP 操作系统,利用VisualC++6.0开发系统开发了转台运动控制系统软件,具有视频显示、转台控制方式选择、转台运动状态显示、GPS信号显示、异常报警等功能,利用下位机封装好的各类运动控制函数和参数设置功能函数,在上位机软件开发时实现“下位机透明”式的开发,使上位机界面开发以及和其他功能集成时无须关注运动控制层的细节,从而更着重于其他方面功能的实现。
4.2下位机控制软件的开发下位机控制系统中PMAC卡上集成了丰富的运动控制指令和算法,为转台的运动控制提供了方便,对于转台控制下位机软件的开发,充分利用PMAC卡的开放性,主要包括位置伺服模块、PLC监控模块等,位置伺服模块可通过设置PMAC卡内部PID参数实现,PLC监控模块用于实时提取转台运行状态信号,包括当前的运行方位、运行速度及是否都达到位置限位等,主要包括PMAC的设置和PMAC运动程序的编写。
4.3工控机与PMAC卡的通信软件外部信号通过计算机串口送入工控机,转换成方位角度后送入PMAC卡,转台的运动方位信息实时通过工控机进行显示,同时,各种控制指令也是通过工控机传给PMAC卡,从而实现各种控制目的,本系统利用PMAC 卡提供的PCOMM32通信套件,采用动态链接库方式,便于上下位机软件的模块化和封装并使得上位机编程环境的选择更加自由。
本课题以PMAC卡为核心对三轴转台的硬件及软件进行了设计,通过PMAC构建转台控制系统,具有实时能力强、系统稳定、易操作等优点。