红外遥控编程参考(单片机读取按键编码)
51单片机红外解码资料+源代码
位地 8FH 8EH 8DH 8CH 8BH 8AH 89H 88H 址
源代码如下: #include<reg52.h> #define uchar unsigned char #define uint unsigned int sbit dula=P2^6; sbit wela=P2^7;
uchar irtime; //红外时间 uchar startflag; //启动接收 uchar irdata[33]; uchar bitnum; uchar irreceiveok; //红外接收完毕 uchar ircode[4]; uchar irprosok; uchar disp[8]; uchar code smg_du[]={
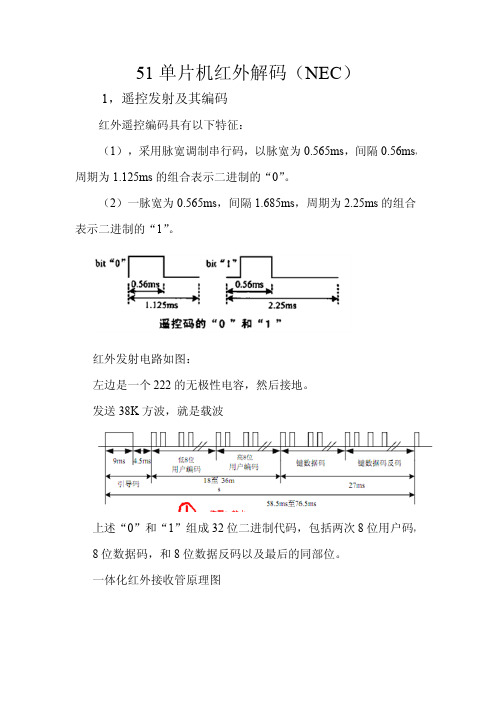
发射器发射的的信号为
接收器接收到的信号为
即 9ms 低电平后 4.5ms 高电平作为起始码,之后接受到两次 8 位客户码,一次八位数据码,和一次八位数据反码。
遥控器在按键按下之后周期性的发出同一种 32 位二进制编 码周期约为 108ms,一组码持续时间随本身的“0”“1”个数不同
而不同。大约在 45~63ms 之间,当一个键按下 36ms,振荡器使芯 片激活,将发射一组 108ms 的编码脉冲这 108ms 编码脉冲由一个 起始码(9ms),一个结束码(4.5ms),低八位地址码(9~18ms), 高八位地址码(9~18ms),八位数据码(9~18ms),和这八位数据 码反码(9~18ms),如果按下超过 108ms 仍未松开,接下来发射 的代码(连发代码)将仅有起始码(9ms)和结束码(2.5ms)组 成。
解码的关键是如何识别零和一: “0”和“1”都是以 0.56ms 低电平开始的,不同的是高电平 宽度不同,“0”为 0.56ms“1”为 1.168ms,所以必须根据高电平 宽度来区别“0”和“1”。 如果从 0.56ms 低电平过后,开始延时,0.56ms 后,若读到的 电平为低,说明该位为零,反之则为一,可靠其间,延时必须比 0.56ms'长一些,又不能超过 1.12ms,否则如果该位为零,读到的 已是下一位高电平,因此取(1.12+0.56)/2=0.84ms 最为可靠,一 般取 0.84ms 左右均可。根据码的格式,应该等待 9ms 起始码和 4.5ms 结束码完成后才能读码。 备注:定时器/计数器控制寄存器 TCON 位序 D7 D6 D5 D4 D3 D2 D1 D0 号 位符 TF1 TR1 TF0 IR0 IE1 IT1 IE0 IT0 号
c51、c52单片机红外线遥控接收解码c程序(可直接使用)
/ 亲,此程序以经过测试,可直接使用!!!/#include <reg51.h>#define uchar unsigned char#define uint unsigned intvoid delay(uchar x);sbit IRIN = P3^2;uchar IRCOM[4];void main(){ IE = 0x81;TCON = 0x01;IRIN=1;/* 此处可以根据按键码自由编写程序/以下为3*7遥控按键码//(也可以应用与其他类型遥控,本程序只以3*7遥控为例)/ / 0x45 0x46 0x47 // 0x44 0x40 0x43 // 0x07 0x15 0x09 // 0x16 0x19 0x0d // 0x0c 0x18 0x5e // 0x08 0x1c 0x5a // 0x42 0x52 0x4a /例如:while(1){switch(IRCOM[2]){case 0x45: P2=0x7f; break;case 0x44: P2=0xbf; break;case 0x07: P2=0xdf; break;case 0x16: P2=0xef; break;case 0x0c: P2=0xf7; break;case 0x08: P2=0xfb; break;case 0x42: P2=0xfd; break;case 0x52: P2=0xfe; break;case 0x4a: P2=0xff; break;case 0x5a: P2=0x00; break;}} */while(1);} //end main/**********************************************************/ void IR_IN(void) interrupt 0 //外部中断服务程序{unsigned char j,k,N=0;EX0 = 0;delay(15);if (IRIN==1){ EX0 =1;return;}//确认IR信号出现while (!IRIN) //等IR变为高电平,跳过9ms的前导低电平信号。
红外遥控信号的编码方法与单片机译码程序的设计
文章编号:100622475(2000)0620108203红外遥控信号的编码方法与单片机译码程序的设计崔如春, 谭海燕(佛山科学技术学院计算机系,广东佛山 528000)摘要:介绍了两种常用的红外遥控信号的编码方法:脉冲占空比编码调制,脉冲宽度编码调制。
提出了用单片机对其进行识别译码的程序设计方法。
并给出了程序设计举例。
关键词:红外遥控;编码;译码;单片机中图分类号:T P 722.5 文献标识码:AEncod i ng M ethods and M icroprocessor D ecod i ng Programm i ngfor Rem ote Con trol Signa lCU I R u 2chun , TAN H ai 2yan(D epartm ent of Computer Science and T echno logy ,Fo shan U niversity ,Fo shan 528000,Ch ina )Abstract :In troduces tw o u sual remo te con tro l signal encoding m ethods :pu lse w idth modu lati on ,pu lse space rati o modu lati on .T he decoding p rogramm ing m ethod of m icrop rocesso r is p ropo sed w ith a p rogramm ing examp le .Key words :remo te con tro l ;encode ;decode ;m icrop rocesso r0 引 言 现在,有很多的电器产品(如一些家用电器)的操作控制都采用了红外遥控,一些遥控功能相对简单的电器产品,红外遥控信号的接收识别往往采用与编码调制芯片配套的译码芯片。
红外遥控器按键编码

EA = 1;
//允许全局中断
EX0 = 1;
//允许 INT0 中断
PX0 = 0;
//INT0 的中断级别为低
IT0 = 0;
//设定 INT0 上升沿和下降沿都可以中断
/*初始化 T0:16 位自动重装填模式*/
{LED1=ON;LED2=OFF;LED3=OFF;LED4=OFF;LED5=OFF;}
if(temp==IR_2)
{LED1=OFF;LED2=ON;LED3=OFF;LED4=OFF;LED5=OFF;}
if(temp==IR_3)
{LED1=OFF;LED2=OFF;LED3=ON;LED4=OFF;LED5=OFF;}
break;
}
case IR_WordA: {
if((IR_Num%2)==0&&InfraredRayPin==1) {
TH0 = 0x00; TL0 = 0x00; TimeStart; break; } if((IR_Num%2)==1&&InfraredRayPin==0) { TimeStop; IR_Time=TH0; IR_Time<<=8; IR_Time|=TL0; IR_DataA<<=1; if(IR_Time<800) {
1
#define IR_WordB
2
#define IR_End
3
#define TimeStart (TR0=1)
#define TimeStop (TR0=0)
void InfraredRay_Init(void);
单片机红外遥控学习代码

count++;
if(irflag==1) //如果标志为1,则发送38KHZ载波
ir=~ir;
else ir=0; //否则一直为零
}
TR1=1; //启动定时器
while(count<set_count); //等待发送完
TR1=0; //关闭定时器
if(ircode&0x80) //判断红外编码最低位,若为1则1.69ms的低电平
}
}
else if(kb==0) //判断按键3是否按下
{
delay(10);
if(kb==0)
{
keyflag=1;
irdata=5; //若按键2按下,发送5
ET1=1; //定时器中断允许
TH1=0xf3; //初值
TL1=0xf3; //初值
}
//---------------------------------------------------------------------------
for(i=0;i<8;i++) //循环发送
{
set_count=16; //发送0.56ms的高电平
irflag=1; //启动红外发射二极管发送
count=0; //中断技计数清零
}
}
}
//---------------------------------------------------------------------------
void ir_sendbyte() //发送数据字节
{
uchar i;
红外遥控编码原理及C程序,51单片机红外遥控
case 0x19:j=1;//100+
break;
case 0x0d:k=1;//200+
break;
case 0x16:l=1;//0
break;
case 0x0c:m=1;//1
{
temp=temp>>1; //最先读出的是高位数据
dingshiqi();//定时器记高低电平时间,数据码
if((HighTime>300)&&(HighTime<900)) //说明该位是0
temp=temp&0x7f;
if((HighTime>1200)&&(HighTime<2200)) //说明该位是1
uchar code table1[]={"User Code:"};
void delay(uint x)
{
uint i,j;
for(i=x;i>0;i--)//i=xms即延时约xms毫秒
for(j=100;j>0;j--);
}
void write_com(uchar com)
{//写液晶命令函数
{
a=0;b=0;c=0;d=0;
e=0;f=0;g=0;h=0;
i=0;j=0;k=0;l=0;
m=0;n=0;o=0;p=0;
q=0;r=0;s=0;t=0;
u=0;
}
void init_1602()
{//初始化函数
uchar num;
lcden=0;
rs=0;
write_com(0x38);//1602液晶初始化
while(1)
红外遥控代码
UPD6121G产生的遥控编码是连续的32位二进制码组,其中前16位为用户识别码,能区别不同的电器设备,防止不同机种遥控码互相干扰。
该芯片的用户识别码固定为十六进制01H;后16位为8位操作码(功能码)及其反码。
UPD6121G 最多额128种不同组合的编码。
遥控器在按键按下后,周期性地发出同一种32位二进制码,周期约为108ms。
一组码本身的持续时间随它包含的二进制“0”和“1”的个数不同而不同,大约在45~63ms之间,图4为发射波形图。
当一个键按下超过36ms,振荡器使芯片激活,将发射一组108ms的编码脉冲,这108ms发射代码由一个起始码(9ms),一个结果码(4.5ms),低8位地址码(9ms~18ms),高8位地址码(9ms~18ms),8位数据码(9ms~18ms)和这8位数据的反码(9ms~18ms)组成。
如果键按下超过108ms仍未松开,接下来发射的代码(连发代码)将仅由起始码(9ms)和结束码(2.5ms)组成。
代码格式(以接收代码为准,接收代码与发射代码反向)①位定义②单发代码格式③连发代码格式注:代码宽度算法:16位地址码的最短宽度:1.12×16=18ms16位地址码的最长宽度:2.24ms×16=36ms易知8位数据代码及其8位反代码的宽度和不变:(1.12ms+2.24ms)×8=27ms 所以32位代码的宽度为(18ms+27ms)~(36ms+27ms)1.解码的关键是如何识别“0”和“1”,从位的定义我们可以发现“0”、“1”均以0.56ms的低电平开始,不同的是高电平的宽度不同,“0”为0.56ms,“1”为1.68ms,所以必须根据高电平的宽度区别“0”和“1”。
如果从0.56ms低电平过后,开始延时,0.56ms以后,若读到的电平为低,说明该位为“0”,反之则为“1”,为了可靠起见,延时必须比0.56ms长些,但又不能超过1.12ms,否则如果该位为“0”,读到的已是下一位的高电平,因此取(1.12ms+0.56ms)/2=0.84ms最为可靠,一般取0.84ms左右均可。
STM32单片机红外遥控

STM32单片机红外遥控红外遥控接口电路STM32单片机红外遥控程序源代码#include "sys.h"#define LED_RED PBout(12) //红色发光二极管控制管脚初始化PB12 #define LED_GREEN PBout(13) //绿色发光二极管控制管脚初始化PB13 #define LED_YELLOW PBout(14) //黄色发光二极管控制管脚初始化PB14 #define LED_BLUE PBout(15) //蓝色发光二极管控制管脚初始化PB15 #define BEEP PBout(5) //蜂鸣器端口定义PB5#define RDATA PAin(1) //红外数据输入脚//红外遥控识别码(ID),每款遥控器的该值基本都不一样,但也有一样的//我们选用的遥控器识别码为0#define REMOTE_ID 0static u8 fac_us=0; //us延时倍乘数static u16 fac_ms=0; //ms延时倍乘数void delay_init(u8 SYSCLK);void delay_ms(u16 nms);void delay_us(u32 nus);void Led_Init(void); //发光二极管控制管脚初始化void Red_Led_Light(void); //点亮红色发光二极管void Green_Led_Light(void); //点亮绿色发光二极管void Yellow_Led_Light(void); //点亮黄色发光二极管void Blue_Led_Light(void); //点亮蓝色发光二极管void Red_Led_Goout(void); //熄灭红色发光二极管void Green_Led_Goout(void); //熄灭绿色发光二极管void Yellow_Led_Goout(void); //熄灭黄色发光二极管void Blue_Led_Goout(void); //熄灭蓝色发光二极管void Beep_Init(void);void Beep_Tweet(void);void Beep_Silent(void);extern u8 Remote_Cnt; //按键次数,此次按下键的次数extern u8 Remote_Rdy; //红外接收到数据extern u32 Remote_Odr; //命令暂存处u32 Remote_Odr=0; //命令暂存处u8 Remote_Cnt=0; //按键次数,此次按下键的次数u8 Remote_Rdy=0; //红外接收到数据void Remote_Init(void); //红外传感器接收头引脚初始化u8 Remote_Process(void); //红外接收到数据处理u8 Pulse_Width_Check(void); //检查脉宽extern u8 USART_RX_BUF[64]; //接收缓冲,最大63个字节.末字节为换行符extern u8 USART_RX_STA; //接收状态标记//如果想串口中断接收,请不要注释以下宏定义//#define EN_USART1_RX //使能串口1接收void uart_init(u32 pclk2,u32 bound);/*************************************************************开发板上电后,用红外遥控器对着开发板上的红外接收头。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
程序可以用来查看每个遥控按键的编码,以便于开发利用遥控每一个按键。
#include<reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit en=P3^4;
sbit rs=P3^5; //用于控制1602
sbit rw=P3^6;
sbit dula=P2^6;
sbit wela=P2^7; //用于控制晶体管
sbit IRIN=P3^2; //红外接收器数据线IO 口
uchar IRCOM[4]=0;
//定义数组IRCOM,分别装解码后得到的数据//IRCOM[0] 低8位地址码
//IRCOM[1] 高8位地址码
//IRCOM[2] 8位数据码
//IRCOM[3] 8位数据码的反码
uchar code table[]="MAKE BY HEIQISHI"; uchar code table1[]="The code is 0x";
uchar code table2[]="0123456789abcdef";
//////////////显示程序///////////////////
void delay(uint z)
{
uint x,y;
for(x=z;x>0;x--)
for(y=112;y>0;y--); //大约是1ms,因为单片机的时钟周期为11.0592mhz。
}
void Write_com(uchar com)
{
rs=0; //指令
P0=com; //写指令函数
delay(5);
en=1;
delay(5);
en=0;
}
void Write_data(uchar dat)
{
rs=1; //数据
P0=dat; //写指令函数
delay(5);
en=1;
delay(5);
en=0;
}
void _1602Init()
{
wela=0;
dula=0; //用于关闭晶体管,因为都是用P0
en=0; //初始时使能为0
rw=0;
Write_com(0x38); //显示屏模式设置为1602方案
Write_com(0x0c); //显示开关/光标设置
Write_com(0x06);
Write_com(0x01); //清屏
Write_com(0x80); //指针置零
}
/////////////////////////////////////////////////////
/////////////////解码程序///////////////////
void delay014ms(uchar x) //x*0.14MS STC10F04延时约0.15MS
{
uchar i;
while(x--)
{
for(i=0;i<15;i++) //13
;
}
}
//////////////初始化////////////
void IR_init(void)
{
EA=1;
EX0=1; //允许总中断中断,使能INT0 外部中断
IT0=1; //触发方式为脉冲负边沿触发IRIN=1; //I/O口初始化
}
////////////解码过程//////////////
void IR_CODE(void) interrupt 0 //在外部中断子程序中解码
{
uchar j,k,N=0,shi,ge;
EX0=0; //防止干扰
delay014ms(15); //延时2.1ms
if (IRIN) //2.1ms能够检测出各种错误信号
{
EX0 =1;
return;
} //确认IR信号出现while(!IRIN); //等IR变为高电平,跳过9ms的前导低电平信号。
delay014ms(18); //2.25ms~4.5ms之间能够检测出引导码信号
if(!IRIN)
{
EX0 =1;
return;
}
//////高电平后开始检测高电平持续的时间以确定是0还是1/////
for(j=0;j<4;j++) //收集四组数据{
for(k=0;k<8;k++) //每组数据有8位
{
while (IRIN); //等IR 变为低电平,跳过4.5ms的前导高电平信号。
//引导码检验结束
while (!IRIN); //等IR 变为高电平开始检测
while (IRIN) //计算IR高电平时长
{
delay014ms(1);
N++;
if (N>=30)
{
EX0=1;
return;
} //0.14ms计数过长自动离开
} //高电平计数完毕
IRCOM[j]=IRCOM[j] >> 1; //数据最高位补"0"
if (N>=8)
{
IRCOM[j] = IRCOM[j] | 0x80;
} //数据最高位补"1"
N=0;
}
}
if (IRCOM[2]!=~IRCOM[3]) //不等的话表示解码失败
{
IRCOM[4]=0;
EX0=1;
return;
}
shi=IRCOM[2]/16;
ge=IRCOM[2]%16;
Write_com(0xce);
Write_data(table2[shi]);
Write_data(table2[ge]);
EX0=1;
P1=~IRCOM[2];
return;
}
/////////////////////////////////////////////////////
void main()
{
uchar i;
IR_init();
_1602Init();
for(i=0;i<16;i++)
Write_data(table[i]);
Write_com(0xc0);
for(i=0;i<14;i++)
Write_data(table1[i]); while(1);
}。