第二章 坐标系及其变换
数学中的坐标系与坐标变换

数学中的坐标系与坐标变换数学是一门广泛应用于各个领域的学科,而坐标系和坐标变换则是数学中的重要概念。
本文将介绍什么是坐标系,坐标变换的概念以及它们在数学和现实生活中的应用。
一、坐标系坐标系是在某一平面或空间中确定点的位置的一种方式。
它由坐标轴和原点组成。
常见的坐标系包括二维笛卡尔坐标系和三维笛卡尔坐标系。
1. 二维笛卡尔坐标系二维笛卡尔坐标系由两条垂直的数轴组成,通常称为x轴和y轴。
原点是坐标系的交点,用(0,0)表示。
在二维笛卡尔坐标系中,每个点都可以表示为一个有序对(x, y),其中x表示点在x轴上的坐标,y表示点在y轴上的坐标。
2. 三维笛卡尔坐标系三维笛卡尔坐标系在二维笛卡尔坐标系的基础上增加了一条垂直于x轴和y轴的z轴。
在三维笛卡尔坐标系中,每个点都可以表示为一个有序组(x, y, z),其中x表示点在x轴上的坐标,y表示点在y轴上的坐标,z表示点在z轴上的坐标。
二、坐标变换坐标变换是指将一个点的坐标从一个坐标系转换到另一个坐标系的过程。
坐标变换在数学和物理学中都有着广泛的应用。
1. 平移平移是一种坐标变换,通过向所有的点添加一个常量向量,从而将一个坐标系中的点转换到另一个坐标系中。
例如,将一个点的坐标由(x, y)变为(x+a, y+b),其中(a, b)表示平移的向量。
2. 旋转旋转是一种坐标变换,通过围绕一个给定的中心点将点按照一定角度旋转,从而将一个坐标系中的点转换到另一个坐标系中。
旋转可以使用旋转矩阵或旋转角度表示。
3. 缩放缩放是一种坐标变换,通过改变点的坐标的比例,从而将一个坐标系中的点转换到另一个坐标系中。
缩放可以使点的坐标变大或变小,可以根据缩放因子在x方向和y方向上进行分别缩放。
三、数学与现实生活中的应用坐标系和坐标变换在数学和现实生活中有着广泛的应用。
以下是一些常见的应用情景:1. 几何学中的图形表示:坐标系可以用来表示几何图形,例如在平面上绘制直线、圆等图形,或者在空间中绘制立方体、球体等图形。
坐标系变换的概念和方法

坐标系变换的概念和方法嘿,朋友们!今天咱来聊聊坐标系变换这个神奇的玩意儿。
你说坐标系变换像不像孙悟空的七十二变呐!它能把一个东西在不同的“世界”里变来变去,可有意思啦!比如说,咱在一个坐标系里看一个图形,普普通通的,没啥特别。
但要是给它来个坐标系变换,哇塞,一下子就变得不一样了,就好像突然给它施了魔法一样。
想象一下,你在一个平面上画了个正方形,这就是它在原本坐标系里的样子。
可要是咱把这个坐标系歪一歪,或者挪一挪,那这个正方形不就变样了嘛!它的位置、形状可能都会发生变化,多神奇呀!这就好像你原本在家里,然后你换了个房间,周围的一切看起来都不一样了。
坐标系变换在很多地方都大有用处呢!比如在物理学里,研究物体的运动。
物体在不同的参考系下运动状态可不一样哦!就像你坐在火车上,看窗外的树是往后跑,但在地面上的人看,树可没动呀。
这不就是坐标系变换在起作用嘛!在数学里那就更不用说啦,解决各种问题都可能用到它。
它能让复杂的问题变得简单,让我们能更清楚地看到问题的本质。
好比是给我们配上了一副神奇的眼镜,能看到别人看不到的东西。
咱再打个比方,坐标系变换就像是给一个故事换个角度来讲。
原本你从主角的视角看故事,觉得平平无奇。
但要是换个配角的视角,或者从反派的视角来看,哇,故事一下子就精彩起来了,有好多之前没注意到的细节都冒出来了。
你说这坐标系变换是不是特别厉害?它能让我们看到同一个事物的不同面,能让我们对世界的理解更加丰富。
它就像一把钥匙,能打开好多扇我们以前没发现的门。
所以啊,可别小看了这坐标系变换。
它不是那种高高在上、遥不可及的东西,而是就在我们身边,随时都能派上用场的好帮手。
我们要学会运用它,就像掌握了一门神奇的武功秘籍一样,能在知识的江湖里闯荡出一番天地来。
不管是解决难题,还是探索新的领域,坐标系变换都能给我们带来意想不到的惊喜呢!这不就是我们追求知识的乐趣所在嘛!。
测量中的坐标系及
地方参考椭球一般选择与当地平均高程相对应的参考椭球,该椭
球的中心、轴向和扁率与国家参考椭球相同,其椭球半径a增
大为:
11
1 1 Hm 0
式中, H m 为当地平均海拔高程, 0 为该地区平均高程异常
在地方投影面的确定过程中,应当选取过测区中心的经线为独立 中央子午线,并选取当地平均高程面为投影面。
换。假设原始坐标系为 OXYZ,转换后为,其中平移变换的矩
阵形式为O' X'Y'Z'
其中平移变换的矩阵形式为
x'
y
'xyFra bibliotekT T
x y
z
'
z
T z
比例变换的矩阵形式为
Sx 0 0
x' y' z' x y z0 Sy 0
0 0 Sz
对于旋转变换,设原始坐标系通过三次旋转转换到新坐标系,分别 是:
(1)不适合建立全球统一的坐标系统 (2)不便于研究全球重力场 (3)水平控制网和高程控制网分离,破坏了空间三维
坐标的完整性。
WGS84坐标系就是能解决上述问题的地心坐标系。
高斯-克吕格投影平面直角坐标系的由来及特点
为了建立各种比例尺地形图的控制及工程测量控制,一般应将椭 球面上各点的大地坐标按照一定的规律投影到平面上,并以相 应的平面直角坐标表示。
3:椭球定向明确,其短轴指向与我国地极原点JYD1968.0方向平 行,大地起始子午面平行我国起始天文子午面。
4:大地高程基准面采用1956黄海高程系统;
5:大地原点与1980西安坐标系相同,但起算数据不同;
高中数学必修课件第二章空间直角坐标系

台体是由两个平行且小于大底面的截面所截得的几何体,在空间直角坐标系中可以通过上 下底面的方程和高度来描述。
几何体顶点、棱长等参数求解
要点一
顶点坐标
对于给定的几何体方程,可以通过解 方程求得顶点的坐标。例如,对于圆 锥方程$z = sqrt{x^2 + y^2} tan(theta)$,当$x=y=0$时, $z=0$,即顶点在原点。
质。
06
空间直角坐标系在实际问 题中应用
地球经纬度系统简介及转换方法
要点一
地球经纬度系统概述
要点二
经纬度与空间直角坐标系的转换
地球经纬度系统是一种以经度和纬度来表示地球上任意位 置的方法,广泛应用于地理、导航、气象等领域。
在实际应用中,经常需要将经纬度坐标转换为空间直角坐 标系中的坐标,或者将空间直角坐标系中的坐标转换为经 纬度坐标。这种转换可以通过一定的数学公式和算法来实 现。
点与坐标对应关系
空间中的每一个点都唯一对应一个三元组坐标,反之每一个三元组坐标也唯一对 应空间中的一个点。
空间向量及其运算规则
01
空间向量定义
既有大小又有方向的量称为空间向量,其大小称为向量的模,方向由起
点指向终点。
02
向量表示
在空间直角坐标系中,向量可以用一个有序三元组来表示,即向量的坐
标表示。
03
向量运算
空间向量的运算包括加法、减法、数乘和点积等,其中加法和减法遵循
平行四边形法则和三角形法则,数乘是将向量与标量相乘得到新的向量
,点积则是两个向量的数量积运算。
02
空间直角坐标系中点与线 关系
点到直线距离公式推导及应用
公式推导
通过向量投影的概念,推 导出点到直线的距离公式 。
直角坐标系和坐标变换

直角坐标系和坐标变换直角坐标系是描述平面或空间中点位置的一种常用坐标系统。
它由两条互相垂直的坐标轴组成,通常被称为x轴和y轴。
坐标轴上的数值表示了点在对应轴上的位置,从而确定了点在整个坐标系中的位置。
而坐标变换则是通过一定的规则将点在一个坐标系中的表示转变为另一个坐标系中的表示。
一、直角坐标系直角坐标系是一种二维坐标系,由水平的x轴和垂直的y轴构成。
x轴和y轴的交点称为原点,通常用O表示。
在直角坐标系中,每个点都可以用一个有序数对(x, y)表示,其中x表示点在x轴上的位置,y表示点在y轴上的位置。
x轴和y轴的正方向上,数值逐渐增大。
在直角坐标系中,可以通过距离和角度来描述点和图形的性质。
例如,两点之间的距离可以使用勾股定理计算,而斜率可以帮助我们理解直线的倾斜程度。
二、坐标变换坐标变换是指将点在一个坐标系中的表示转变为另一个坐标系中的表示。
常见的坐标变换包括平移、旋转、缩放和镜像等。
1. 平移平移是指将一个点在坐标系中沿着某个方向移动一定距离。
如果要将一个点P(x, y)沿着x轴方向平移a个单位,y坐标保持不变,则新坐标是P(x+a, y);如果要将点P沿着y轴方向平移b个单位,x坐标保持不变,则新坐标是P(x, y+b)。
2. 旋转旋转是指将一个点或图形绕某个中心点按一定角度进行旋转。
在二维直角坐标系中,可以使用旋转矩阵对点进行旋转。
设点P(x, y)绕原点逆时针旋转θ角度,则新坐标是P'(x', y'),其中:x' = x * cosθ - y * sinθy' = x * sinθ + y * cosθ3. 缩放缩放是指将一个点或图形按照一定比例进行放大或缩小。
在二维直角坐标系中,可以使用缩放矩阵对点进行缩放。
设点P(x, y)按照比例s 进行缩放,则新坐标是P'(x', y'),其中:x' = s * xy' = s * y4. 镜像镜像是指将一个点或图形关于某个轴或面对称翻转。
第二章 坐标系及其变换
0 sin cos
cos 0 sin
R
YA
,
0
1
0
sin 0 cos
cos sin 0
R
Z
A
,
sin
cos
0
0
0 1
2.2.2 欧拉角表示
用来确定定点转动刚体位置的一组(3 个)独立角参量 旋转的组合(刚体的多次旋转):
第2 章 坐标系及其变换
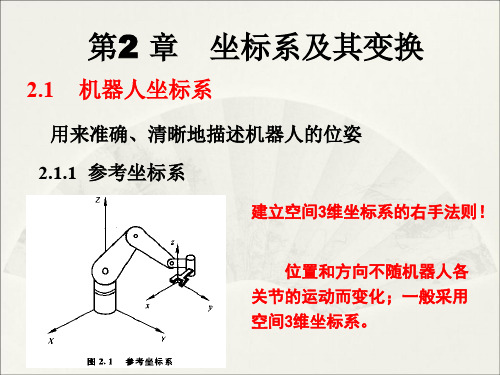
2.1 机器人坐标系
用来准确、清晰地描述机器人的位姿 2.1.1 参考坐标系
建立空间3维坐标系的右手法则!
位置和方向不随机器人各 关节的运动而变化;一般采用 空间3维坐标系。
2.1.2 关节坐标系
3 2
6
4
5 1
用来描述机器人每一个独立关节的运动。 特别需要指出的是机器人的每一个关节都只具有一个自由度!
Bp 1
齐次坐标变换矩阵可分解成为平移矩阵 与旋转矩阵的乘积
A
RB
013
A
pBo
I33
1 013
A
pBo 1
A RB 013
031 1
基本齐次坐标变换矩阵
组合变换后齐次坐标变换矩阵的求解
变换次序:1-2-3…-N (参考坐标系为0)
3)复合坐标变换
A p ARB B p ratation
Ap
Bp
p A Bo
translation
Ap
ARB
Bp
p A Bo
坐标变换讲解

坐标变换讲解
坐标变换是指将一个坐标系中的点或向量转换到另一个坐标系中的过程。
在二维情况下,一般使用2x2的矩阵来表示坐标变换,而在三维情况下则使用3x3的矩阵。
在二维情况下,假设有两个坐标系A和B,坐标系A中的点P(x,y)需要转换到坐标系B中的点P'(x',y')。
坐标变换可以通过以下公式来实现:
[x'] = [a b] [x]
[y'] [c d] [y]
其中,a、b、c和d是转换矩阵的元素,它们定义了从坐标系A 到坐标系B的转换关系。
具体来说,a和d表示坐标轴的缩放因子,b和c表示坐标轴的旋转因子。
在三维情况下,坐标变换的方式稍有不同。
假设有两个坐标系A 和B,坐标系A中的点P(x,y,z)需要转换到坐标系B中的点P'(x',y',z')。
坐标变换可以通过以下公式来实现:
[x'] = [a b c] [x]
[y'] [d e f] [y]
[z'] [g h i] [z]
其中,a、b、c、d、e、f、g、h和i是转换矩阵的元素,它们定义了从坐标系A到坐标系B的转换关系。
具体来说,a、e和i表示坐标轴的缩放因子,b、c、d、f、g和h表示坐标轴的旋转和剪切因子。
需要注意的是,坐标变换不仅仅可以用矩阵表示,还可以使用四元数、欧拉角等方式进行表示。
此外,在实际应用中,坐标变换经常涉及到平移操作,可以通过引入齐次坐标进行处理。
总之,坐标变换是将一个坐标系中的点或向量转换到另一个坐标系中的过程,通过定义适当的转换矩阵或其他表示方式,可以实现不同坐标系之间的转换。
常用坐标系介绍及变换PPT课件

目录
• 常用坐标系介绍 • 坐标变换基础 • 坐标变换的应用 • 坐标变换的数学表达 • 坐标变换的物理意义 • 坐标变换的计算机实现
01
常用坐标系介绍
笛卡尔坐标系
01
02
03
直角坐标系
以原点为中心,x轴、y轴、 z轴分别代表三个相互垂 直的坐标轴,用于描述平 面和空间中的点。
二维坐标变换
总结词
二维坐标变换是指平面内的坐标变化, 包括平移、旋转、缩放等操作。
详细描述
二维坐标变换涉及平面内的点,可以 通过平移、旋转或缩放等操作进行坐 标变化。这种变换在平面几何、图形 处理等领域应用广泛,可以通过矩阵 运算实现快速变换。
三维坐标变换
总结词
三维坐标变换是指空间中的坐标变化,包括平移、旋转、缩放等操作。
详细描述
三维坐标变换涉及空间中的点,可以通过平移、旋转或缩放等操作进行坐标变化。这种变换在三维建模、动画制 作、机器人控制等领域应用广泛,需要使用三维矩阵运算进行实现。
03
坐标变换的应用
图形变换
图形变换是指通过数学方法将一个二维或三维图形在坐标系 中进行平移、旋转、缩放等操作,以达到改变图形位置、大是一种数值计算方法,通过将物体离散化为有限个单元,可 以分析物体的受力情况和形变程度。有限元分析在工程领域中有着广泛 的应用,可以提高设计效率和精度。
06
坐标变换的计算机实现
OpenGL中的坐标变换
投影变换
将三维场景投影到二维屏 幕上,包括正交投影和透 视投影。
视图变换
将场景中的坐标系与观察 者的坐标系进行关联,实 现视景体裁剪。
旋转变换不改变图形的大小和形状, 只改变其方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
绕固定轴旋转
A RPYB , , R Z A , R YA , R X A , c s c s s s c c s c s s c c s s s c c s s c c s c s c c s
2.3
坐标变换
2.3.1 直角坐标及其变换 1、直角坐标与向量运算
A ax i a y j az k B bx i by j bz k
向量的点积、向量的叉积
2、坐标变换
空间的同一点(向量)在不同坐标系的描述
1)平移坐标变换
A
p B p A pBo
平移方程
2)旋转坐标变换
0 sin 1 0 0 cos
2.2.2 欧拉角表示
用来确定定点转动刚体位置的一组(3 个)独立角参量 旋转的组合(刚体的多次旋转):
绕当前轴旋转;
A EulerB , , R Z A , R Y1 , R Z2 ,
0 1 R X A , 0 cos 0 sin sin cos 0
cos R YA , 0 sin
cos R Z A , sin 0 sin cos 0 0 0 1
0
TN
N 1
TN T3 T2 T1
2
1
0
矩阵相乘的顺序与变换顺序相反
2)相对于当前坐标系的组合变换
0
TN 0T1 1T2 2T3 N 1TN
矩阵相乘的顺序与变换顺序相同
齐次变换的逆变换
A
p TB p
A B
A A 1
B
p TA p TB A p
B
A
p B p A pBo
A
translation
p A RB B p A pBo
Composite Transformation
2.3.2 齐次坐标及其变换
A
p A RB B p A pBo
A
p TB p
A B
A A p RB 1 013
第2 章
2.1
坐标系及其变换
机器人坐标系
用来准确、清晰地描述机器人的位姿 2.1.1 参考坐标系
建立空间3维坐标系的右手法则!
位置和方向不随机器人各 关节的运动而变化;一般采用 空间3维坐标系。
2.1.2 关节坐标系
3 6 2 4 5
1
用来描述机器人每一个独立关节的运动。
特别需要指出的是机器人的每一个关节都只具有一个自由度!
A
pBo B p 1 1
齐次坐标 齐次坐标变换矩阵
齐次变换:就是把被变换坐标系所描述的矢 量变换成用其参考坐标系所描述的矢量
A RB p 1 013 A A
pBo B p 1 1
齐次坐标变换矩阵可分解成为平移矩阵 与旋转矩阵的乘积
A RB 013
A
pBo I 33 1 013
A
pBo A RB 1 013
031 1
基本齐次坐标变换矩阵
组合变换后齐次坐标变换矩阵的求解 变换次序:1-2-3…-N (参考坐标系为0)
1)相对于参考坐标系的组合变换
0 0 0 1
V 1 cos
Rotating about Z axis x 0, y 0, z 1
等效旋转轴及等效旋转角 κ,
本章小结:
参考坐标和关节坐标(移动坐标) 位置、姿态的表述方式(直角坐标、欧拉坐标) 坐标变换、齐次坐标变换 一般旋转变换、等效旋转变换
A
p A RB B p
旋转方程
B
p RA p RB
B A A
1 Ap RB ຫໍສະໝຸດ AT Ap
旋转矩阵为正交矩阵! 同一行、列元素的平方和=1; 不同行、列元素对应乘积的和=0; 矩阵行列式=1.
旋转矩阵的9个元素是线性相关的!
3)复合坐标变换
A
p ARB B p
ratation
2.2
机器人位姿表述
机器人是由一系列关节连接起来的连杆所组成的 多刚体系统。
2.2.1 直角坐标表示
1、刚体位姿表示
用一个3维列向量表示刚体 中的点(向量)在参考坐标系的位置
Ro xo
yo
zo
T
1、刚体位姿表示
用一个固连于刚体上的3维 坐标与参考坐标系之间的方 向关系表示刚体在空间的方 向(姿态)
xA A r y A zA xB B r y B zB
已知 B r 和坐标系B与A的关系, 求 Ar 。
A
r A RB B r
A
RB
坐标{B}向坐标{A}变换的旋转矩阵;描述坐
标{B}在坐标{A}中的姿态,姿态矩阵。
5
基本旋转矩阵(绕坐标轴的旋转)
R B B TA 013
A
T
RB
A
T A
1
PB0
一般旋转变换
旋转轴线不与参考系的任何轴线重合 引入一个新的坐标系{C}
nx n C y nz 0
Rot κ, Rot Zc ,
ox oy oz 0
ax ay az 0
Rot κ, CRot Zc , C 1
x xV c y xV z s z xV y s V s V c V s z y y z y x Rot κ , x y x zV y s y zV x s z zV c 0 0 0
R n o a
旋转矩阵
nx ox ax o o a a n n y y y nz oz az
分别表示固连于刚体的坐标系三个坐标
轴在参考坐标系中的位置!
2、旋转矩阵的一般形式
0 0 0 1
κ ax i ay j az k
被旋转的坐标系 O ' x ' y ' z '
在OXYZ中表示为{Y} 在{C}中表示为{X}
Y CX
X C 1Y
Rot κ, Y CRot Zc , X
Rot κ , Y CRot Z c , X CRot Z c , C 1Y