WPZ-37600 型煤矿用巷道修复机2
煤矿安全培训-巷道修复机司机应知应会手册
煤矿安全培训巷道修复机司机应知应会手册目录第一部分常用巷道修复机型号、结构、性能 (1)一、型号 (1)二、结构 (1)三、性能 (2)第二部分巷道修复机的基本知识 (3)一、主机部 (3)二、动力臂部 (3)三、中间连接部 (4)四、快换装置 (4)五、作业装置 (5)六、行走部 (6)七、日常故障检修 (6)第三部分巷道修复机工作流程 (8)一、巷道修复机开机前应符合以下规定 (8)二、巷道修复机开机顺序 (8)三、巷道修复机使用操作 (8)四、巷道修复机使用检修期间应符合以下规定 (11)五、巷道修复机操作中断和停机应符合以下规定 (11)第四部分巷道修复机司机安全生产责任制 (12)一、责任范围 (12)二、责任清单 (12)第五部分巷道修复机司机岗位安全风险管控清单 (13)一、顶板伤人类风险 (13)二、机电伤人类风险 (13)三、操作伤人类风险 (14)四、通风伤人类风险 (14)五、个体防护类风险 (14)第六部分掘进系统岗位操作红线 (15)第七部分巷道修复机司机岗位作业流程标准 (16)一、班前准备 (16)二、接班 (16)三、作前现场评估 (16)四、破碎、装煤、停机 (16)五、结束 (17)六、交班 (17)第八部分巷道修复机司机岗位作业口诀 (18)第一部分常用巷道修复机型号、结构、性能一、型号WPZ-37/600型巷道修复机WPZ - 37 / 600液压锤冲击能力为600J装机总功率为37KW煤矿用修复机二、结构巷道修复机主要由主机部、行走部、动力臂部、中间连接部、快换装置、作业装置以及护罩组件组成。
主机部左右两侧与行走部相连,前部通过动力臂调角油缸、动力臂摆动油缸与动力臂部相连。
动力臂另一端铰接有中间连接部,中间连接部通过快换装置调角油缸、快换装置摆动油缸与快换装置相连,快换装置前端与作业装置相连。
1.作业装置2.快换装置3.中间连接部4.动力臂部5.主机部6.行走部7.护罩组件三、性能1.采用三节臂的设计,可以根据巷道大小变化,调节臂的高低,避免触碰锚杆,锚索,巷道顶板,从而使巷道修复机在不同高度的断面内灵活作业。
煤矿巷修机培训教案
第一章概述一、WPZ--37/600煤矿用巷道修复机的用途及特点:WPZ-37/600煤矿用巷道修复机(简称修复机)是张家口宣化华泰矿冶机械有限公司在吸收国内外同类产品优点的基础上,自主研发、制造的一种多功能巷道修护设备。
该产品严格按照Q/HT030-2016《煤矿用巷道修复机》企业标准进行生产、制造、测试和检验。
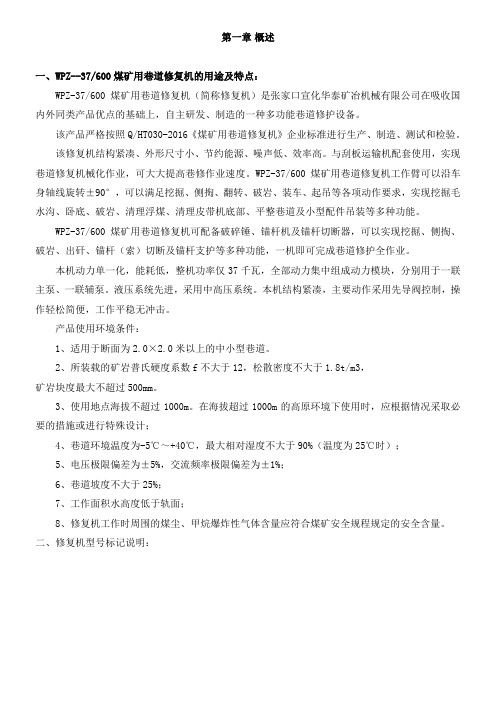
该修复机结构紧凑、外形尺寸小、节约能源、噪声低、效率高。
与刮板运输机配套使用,实现巷道修复机械化作业,可大大提高巷修作业速度。
WPZ-37/600煤矿用巷道修复机工作臂可以沿车身轴线旋转±90°,可以满足挖掘、侧掏、翻转、破岩、装车、起吊等各项动作要求,实现挖掘毛水沟、卧底、破岩、清理浮煤、清理皮带机底部、平整巷道及小型配件吊装等多种功能。
WPZ-37/600煤矿用巷道修复机可配备破碎锤、锚杆机及锚杆切断器,可以实现挖掘、侧掏、破岩、出矸、锚杆(索)切断及锚杆支护等多种功能,一机即可完成巷道修护全作业。
本机动力单一化,能耗低,整机功率仅37千瓦,全部动力集中组成动力模块,分别用于一联主泵、一联辅泵。
液压系统先进,采用中高压系统。
本机结构紧凑,主要动作采用先导阀控制,操作轻松简便,工作平稳无冲击。
产品使用环境条件:1、适用于断面为2.0×2.0米以上的中小型巷道。
2、所装载的矿岩普氏硬度系数f不大于12,松散密度不大于1.8t/m3,矿岩块度最大不超过500mm。
3、使用地点海拔不超过1000m。
在海拔超过1000m的高原环境下使用时,应根据情况采取必要的措施或进行特殊设计;4、巷道环境温度为-5℃~+40℃,最大相对湿度不大于90%(温度为25℃时);5、电压极限偏差为±5%,交流频率极限偏差为±1%;6、巷道坡度不大于25%;7、工作面积水高度低于轨面;8、修复机工作时周围的煤尘、甲烷爆炸性气体含量应符合煤矿安全规程规定的安全含量。
二、修复机型号标记说明:三、修复机结构:WPZ-37/600煤矿用巷道修复机由工作机构、底盘总成、动力系统、液压系统、电气系统组成,修复机结构见图1-1四、修复机参数:修复机基本性能参数见表 1-1第二章结构特征及工作原理WPZ-37/600 煤矿用巷道修复机由工作机构、底盘总成、液压系统、动力部分、电气系统等六部分组成。
WPZ-37600 型煤矿用巷道修复机1
2017年04月16
山东煤炭技术学院培训中心
煤矿用巷道修复机特点
WPZ-37/600 煤矿用巷道修复机可配备 破碎锤、锚杆机及锚杆切断器,可 以实现挖掘、侧掏、破岩、出矸、锚杆(索) 切断及锚杆支护等多种功能, 一机即可完成巷道修护全作业。
2017年04月16
山东煤炭技术学院培训中心
巷道修复机
修复机结构
W P Z — □/□ 主参数代号:装机功率kw /液压锤冲击能J
产品类型:煤矿用修复机示例:履带行走, 挖掘装料,液压驱动,装机总功率为37Kw, 液压锤冲技能为600J 的煤矿用巷道修复机: WPZ-37/600。
2017年04月16
山东煤炭技术学院培训中心
修复机结构
WPZ-37/600 煤矿用巷道修复机由工作机构、 底盘总成、动力系统、液压系统、电气系统 组成,修复机结构见图1-1
2017年04月16
1-电机2-连接盘3-联轴器 4-主泵 5-辅泵
山东煤炭技术学院培训中心
五、电气系统:
WPZ-37/600煤矿用巷道修复机电气系统 主要由防爆电机、QJZ-120/1140(660)Z 系列矿用隔爆兼本质安全型真空电磁起动器、 LED机车灯、及与其配套使用的温度开关、 液位控制开关、甲烷传感器、防爆电铃等组 成。
2017年04月16
山东煤炭技术学院培训中心
产品使用环境条件:
5、 电压极限偏差为±5%,交流频率极限偏 差为±1%;
6、 巷道坡度不大于25%; 7、 工作面积水高度低于轨面; 8、 修复机工作时周围的煤尘、甲烷爆炸性气
体含量应符合煤矿安全规程规定的安全含量。
2017年04月16
山东煤炭技术学院培训中心
WPZ-55-400煤矿用巷道修复机简介

WPZ-55/400煤矿巷道修复机
WPZ-55/400煤矿用巷道修复机是一种多功能巷道修复设备,可应用于煤巷、半煤岩巷和全岩巷,可以对巷道顶板、底板及侧帮进行破碎、挖装、铲平等日常维护作业,也可以对大块的岩石、煤块进行破碎,以便装运。
该机可应用在巷道卧底扩帮、短距煤巷掘进、双突矿井的煤巷掘进等多种作业。
该设备主要特点是:
1.工作臂自身可实现±180°旋转,增加工作范围,并使挖斗和破碎锤始终保持垂直于工作面作业,可方便的实现对变形巷道的扩修、挖掘作业。
2.自带一运运输功能,适用于修复作业量大,出矸量大的巷道使用。
3.机身结构紧凑,功能多,可靠性高,可适应变形巷道的狭小空间作业。
4.破碎锤和扒装功能的快速切换,提高工作效率。
图1 整机
图2 旋转±90°帮边作业
图3 旋转±180°顶部作业
该机真正意义上实现了一机多用,可在巷道卧底扩帮、挖掘水沟、掏皮带机下浮煤等多种作业中完全替代人工,提高工作效率,提升工作安全性,降低工人劳动强度,是一台经济、实用、可靠的多功能巷修设备。
WPZ-55/400煤矿巷道修复机参数表
WPZ-55/400煤矿巷道修复机主要外购件配置表。
煤矿用巷道修复机说明书
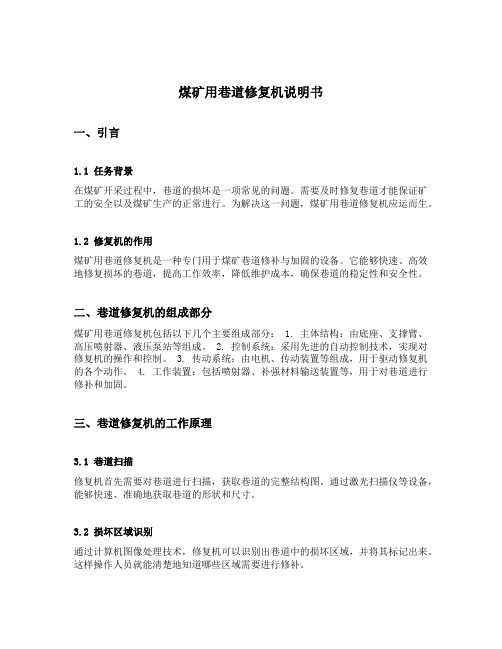
煤矿用巷道修复机说明书一、引言1.1 任务背景在煤矿开采过程中,巷道的损坏是一项常见的问题。
需要及时修复巷道才能保证矿工的安全以及煤矿生产的正常进行。
为解决这一问题,煤矿用巷道修复机应运而生。
1.2 修复机的作用煤矿用巷道修复机是一种专门用于煤矿巷道修补与加固的设备。
它能够快速、高效地修复损坏的巷道,提高工作效率,降低维护成本,确保巷道的稳定性和安全性。
二、巷道修复机的组成部分煤矿用巷道修复机包括以下几个主要组成部分: 1. 主体结构:由底座、支撑臂、高压喷射器、液压泵站等组成。
2. 控制系统:采用先进的自动控制技术,实现对修复机的操作和控制。
3. 传动系统:由电机、传动装置等组成,用于驱动修复机的各个动作。
4. 工作装置:包括喷射器、补强材料输送装置等,用于对巷道进行修补和加固。
三、巷道修复机的工作原理3.1 巷道扫描修复机首先需要对巷道进行扫描,获取巷道的完整结构图。
通过激光扫描仪等设备,能够快速、准确地获取巷道的形状和尺寸。
3.2 损坏区域识别通过计算机图像处理技术,修复机可以识别出巷道中的损坏区域,并将其标记出来。
这样操作人员就能清楚地知道哪些区域需要进行修补。
3.3 材料喷射修复机采用高压喷射技术进行修补。
根据巷道的材料特性和修复要求,选择合适的补强材料,并通过喷射器将其喷射到损坏区域。
3.4 补强材料固化修复机喷射的补强材料通常是快干型的,其固化时间较短。
在喷射完成后,补强材料会迅速固化,并与巷道墙面形成牢固的结合。
四、巷道修复机的优势修复机在巷道修复方面具有以下优势: 1. 高效快速:采用自动化技术,能够快速扫描、识别、喷射和固化,提高工作效率。
2. 精确准确:凭借先进的传感器和图像处理技术,修复机能够准确识别损坏区域,并对其进行精细修补。
3. 安全可靠:修复机操作简单,操作人员无需直接进入巷道,降低了工作风险。
4. 降低维护成本:通过及时修复巷道,可以延长巷道的使用寿命,降低了后期的维护成本。
煤矿井下巷道修复机在巷修施工中的应用

煤矿井下巷道修复机在巷修施工中的应用摘要:龙煤集团鹤岗分公司下属富力煤矿,针对目前井下开采,随着矿井的延深,矿山压力显现明显增大,已施工巷道出现严重变形,底板鼓起、顶板下沉、两帮位移严重,断面缩小,需要恢复场所增多,人工修复巷道已不能满足生产接续需要,为提高快速修复巷道能力,富力煤矿井下巷道恢复采用型号:MWD5.1/0.13L 型煤矿用液压巷道修复机,该机结构紧凑、外形尺寸小,行走灵活,利用机械臂配合可互换的机构,实现多功能切换,机械配备挖斗、破碎器、能够旋转360度,具有足够的强度,破碎强度达到f≤10以内的岩壁,可进行巷道开帮、挑顶;卧底、装货;支护前利用机械臂升起刹杆,撑起钢筋网可作为巷道临时支护等功能来保证煤矿安全生产奠定基础,实现煤矿巷修机械化,从而提高煤矿安全、高产、高效巷道修复技术。
关键词:富力煤矿;巷道修复机;电力液压系统;巷修机械化前言:随着富力煤矿不断的开采,深部巷道已处于高应力集中区,巷道围岩变形严重,底板鼓起,顶板下沉,两帮向巷道里侧位移明显增大,巷道需要恢复场所明显增多,依靠人工体力恢复巷道缓慢,工作效率低,工人劳动强度大,开帮挑顶放炮时对巷道电缆及各种管路损坏严重,并且围岩松动圈加大,存在不安全隐患。
因此我矿引进型号:MWD5.1/0.13L 型煤矿用液压巷道修复机,该机结构紧凑、外形尺寸小,由于采用电动液压系统,因而具有节约能源、卧底、开帮、挑顶等多功能集于一身的巷道修复机替代人工进行巷道恢复工作,既省时又省力,巷修作业效率高,实现煤矿巷修机械化,从而提高掘进巷道恢复速度。
1.结构特征及功能特点辽宁鑫丰矿电设备制造,MWD5.1/0.13L 型煤矿用液压巷修机由 1、挖斗、2 、工作装置、3 回转平台、4液压系统、5 底盘总成、6 机罩、7、破碎锤、8、电气系统等组成,同时由于采用电动液压系统,因而具有节约能源、噪声低、污染小、效率高等特点,可用于恢复巷道开帮挑顶、卧底、拉水沟、装岩(煤)及掘进作业。
煤矿用巷道修复机说明书

煤矿用巷道修复机说明书
煤矿用巷道修复机是一种高效、可靠的设备,用于煤矿巷道的修复和维护。
本文将为您介绍煤矿用巷道修复机的操作指南、注意事项和维护方法。
操作指南:
1. 巷道修复机工作前,需将设备的各个部分进行检查和维护,确保设备正常运转。
2. 在使用巷道修复机时,必须使用符合规定的安全阀门、紧急停车按钮等安全装置。
3. 巷道修复机工作时,操作人员必须站在安全地带,防止被机器吸入或夹住。
注意事项:
1. 巷道修复机使用时一定要注意安全,特别是在巷道壁面不平整的情况下,要注意维持设备的平稳运行。
2. 工作时要注意集中精力,避免因疏忽大意造成事故,严禁酒后操作。
3. 在清洗设备时,使用的清洗剂应当符合环保要求。
对设备的各个部件要进行及时的清洗,防止沉积和积尘影响设备的正常使用。
维护方法:
1. 工作结束后,要及时清理设备周围的灰尘和污垢。
长时间的灰
尘和污垢会堵塞设备通风口,影响设备的正常运转。
2. 检查设备各个部分的螺丝是否松动,如有松动应及时进行紧固。
3. 定期更换设备的滤芯和滤网,保证设备正常运转,并延长设备
的使用寿命。
总的来说,煤矿用巷道修复机是一种非常重要的设备,对于煤矿
工业的生产和安全起着关键的作用。
因此,我们必须对其进行严格的
操作、维护和保养,保证设备的正常工作,并为您的工作带来更大的
安全和效率。
巷道修复机
煤矿用巷道修复机HXYL系列WPZ系列煤矿巷道修复机集装载、破碎、行走于一体,具有多功能的设备,主要用于巷道受压变形后修复,特别是对岩石底板、起鼓、侧帮水沟的挖掘、起到很大作用。
实现扩帮、挑顶、起底机械化施工,大臂可以旋转360°,也可以大臂下降落地,扒皮带下面落地煤。
同时配备了冲击锤、铲斗快拆装置,在井下可以短时间内实现的功能转换。
煤矿用巷道修复机主要用于煤巷及半煤岩巷、全岩巷巷道的顶板、底板及侧帮的日常维护作业,也可以根据需要快速更换破碎锤,对大块的岩石、煤块进行破碎,便于装运。
该机工作大臂可以左右摆动45°,大臂也可以旋转360°,同时配有前推铲,可以满足上顶板挖掘,侧邦挖掘和下部挖掘、破岩、装车、起吊等各项动作要求,实现挖掘毛水沟、卧底、破岩、清理浮煤、清理皮带机底部、平整巷道及小型配件吊装等多种功能作业,并具有体积小,机动灵活、安全高效等特点。
该机能够适应井下复杂环境,在短时间内即可实现破碎器和挖斗功能的转换,大量减少了人工作业时间,解决了煤矿巷道维护、修整的难题,实现了井下巷道修复的机械化作业。
煤矿巷道修复机主要特点1、无需更换销轴,短时间实现破碎锤和铲斗更换。
2、破岩能力强,冲击性大。
3、破碎锤设有活动挂钩,可拆卸,安装方便,可靠实用。
4、装载效率高,扒斗反铲装料,扒臂旋转角度大,彻底解决因扒臂干涉导致扒装死角问题。
5、操作简便、作业效率高。
以WPZ-45煤矿巷道修复机为例:主要技术参数参数名称单位参数数值挖掘深度 mm 500挖掘高度 mm 4500挖掘宽度 mm 4000爬坡能力 ° 16冲击工作压力 MPa 14-17 机重 kg 6000主电机功率 kW 45电压等级 V 660/1140行走速度 m/s 0.3离地间隙 mm 200履带接地比压 MPa 0.1 系统压力 MPa 16。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2017年04月16
山东煤炭技术学院培训中心
操作说明
驾驶室内各操作手柄及踏板布置如图3-1,
1-右操纵杆 2-液压锤踏板 3-行走踏板4-左操纵杆 5-先导开关阀 6-推土铲手柄 7-起动器远控按钮 8-电铃按钮
2017年04月16
山东煤炭技术学院培训中心
8.1.2 在维修过程中,“严禁带电开盖”,必须断电 后开盖。
2017年04月16
山东煤炭技术学院培训中心
九、注意事项
关于本质安全电路:不准用电缆接地芯线作本 安电路的控制线;本安电路不准与其他非本 安电路连接;不准更改本安电路的参数及性 能,不准更改本安电路的元器件型号、规格。
十、警示语句 一“严禁带电开盖”必须断电后开盖。 二 “出厂电压提示”接线通电时注意。
距离。 5.2 使用与操作方法 5.2.1 按电气原理图或接线腔接线图连接好电源线、控制线以及相关
配件。 5.2.2 按电气原理图或接线腔接线图检查连接线是否正确,确保无误
后可送电。 5.2.3 给起动器送电后,再合上外壳右侧中部的隔离开关,合上隔离
开关后观察窗就有相应的显示,如没有故障显示,就可以进行起 动、停止操作;若有故障见故障分析表,排除故障后再进行起动、 停止操作。
6.1.4 试验中严禁带电拔插电子插件,以免损坏电路。 6.1.5 关于本质安全电路:不准用电缆接地芯线作本安电路的控制
线;本安电路不准与其他非本安电路连接;不准更改本安电路 的元器件型号、规格参数。 6.1.6 起动器接线腔两侧的进、出线引入装置及控制回路进、出线 引入装置,暂不使用的均应用压盘、金属堵板和密封圈进行可 靠密封;防爆接合面在使用中严禁碰伤,注意表面清洁,定期 薄薄地涂上一层204-1型防锈油。 6.1.7 应注意电源电压等级与起动器控制变压器原接线端电压等级 是否一致。
操作说明
现将各操作手柄、踏板及按钮的功能及操作方 向分别说明如下(方向基准为机器行走马达 位于后部,操作者面向机器前进方向):
2、左操纵杆: 操纵杆向前推,斗杆油缸收缩,斗杆张开; 操纵杆向后拉,斗杆油缸伸出,斗杆收回; 操纵杆向左拉,大臂向左摆动; 操纵杆向右拉,大臂向右摆动;
2017年04月16
1. 在操作前,为了有效安全的使用机器,必须彻底阅读并理解本 操作手册;
2. 过度疲劳或刚服药不得操作机器; 3. 在离开座椅前,关闭(按下)先导开关按钮,以防止误碰操作
手柄,在离开机器前,将铲斗降到地面后关闭先导开关按钮; 4. 不要靠近操作中的机器。在靠近机器前,必须先通知操作者; 5. 在开始工作前,缓慢操作控制手柄,确保其反应与其功能相符; 6. 起动前应保证各手柄与踏板处于中间位置,以保证机器在启动
2017年04月16
山东煤炭技术学院培训中心
启动和行走
1.启动前先接通电源。 2.电机启动时,先点动数次,一是观察电动机的旋转方向是按箭头
指示方向(或面向电 动机后端盖排风扇顺时针旋转),二是给液压系统充满液压油。 3.启动前先检查各手柄,应均处于中间位置上。 4.启动前确定行走马达的前后位置; 5.按响起动警铃,提醒场内其他人员,确保没有人靠近机器; 6.提起先导开关按钮,接通先导油路; 7.操纵各手柄使工作装置处于行走状态(大臂在正前方位置,挖斗
下面或上面工作时,机器晃动; 5. 在只有升降机、千斤顶或者起重机支撑的情况下,不要在机器上进行工
作; 6. 在切断或移动任何管、接头或是相关单元时,释放管路中的压力; 7. 在进行任何操作时,将挖斗降到地面上,或保证其已被正确锁定,以防
止其意外 落下;
2017年04月16
山东煤炭技术学院培训中心
启动前的安全措施
12. 不要用铲斗齿来吊装和移动重的负载物; 13. 在斜面或斜坡上进行操作,可能造成机器变得不
稳定或不平衡,同时也会加大回转及摆动系统的负 荷,造成系统故障,因此绝对不要在斜面上旋转或 转弯,建立一个水平区域进行操作,仔细地进行操 作控制,防止突然地移动,否则会造成滑落和倾翻; 14. 在进行大臂转动操作时,左右旋转不能大于 180°,否则会绞坏胶管;
色为启动,红色为停止。 10、电缆卷筒收放手柄:
手柄提起,收电缆 手柄压下,放电缆
2017年04月16
山东煤炭技术学院培训中心
下井前的准备
1.每班下井前须检查油箱油位,不足时加油。 2.检查各管路部分是否渗漏,发现问题及时处理。 3.操纵各手柄看各动作是否正常。 4.检查斗齿、侧齿是否损坏,如有损坏更换。 5.检查吊具及吊索是否可靠,检查吊点情况。 6.检查操纵手柄是否在“停止”位置,检查机器工作
2017年04月16
山东煤炭技术学院培训中心
参数设定及调试
6.1.3 用户如进行耐压试验,一定要将阻容吸收装置拆除,同时还 要将电子保护组件和先导插件断开,否则会造成元件损坏,进 行大电流试验时,应将控制变压器的一次侧(1140V或660V或 380V)的二根线与主回路断开,否则会发生人身设备事故。
WPZ-37/600 煤矿用巷道修复机
2017年04月16
山东煤炭技术学院培训中心
WPZ-37/600 煤矿用巷道修复机
五、 产品使用、操作方法 5.1 使用前的准备和检查 5.1.1 使用前应检查各电器元件,是否在运输途中受振损坏、脱落和
受潮现象;如有上述情况发生,需经处理后方可使用。 5.1.2 电源线与接线柱是否可靠固定,并保持规定的电气间隙和爬电
底距地面200-300mm)。 8.操纵行走踏板,行走马达开始运行,机器开始行走至一水平作业
位置(必要时人工清理出一块水平停机区域)
2017年04月16
山东煤炭技术学院培训中心
作业操作
1.挖掘作业 I 浅层挖掘时,要使用大臂,把铲斗设置的太深,会
降低机器的效率; II 当大臂和小臂间形成90-100°夹角时,挖斗能够
山东煤炭技术学院培训中心
操作说明
4、行走操纵杆:两个操纵杆同时向前推时,机器向前行走; 两个操纵杆同时向后拉时,钻车向后行走; 仅推右边操纵杆时,机器向左转; 仅推左边操纵杆时,机器向右转; 在向后拉一个操纵杆的同时向前推另一个操纵杆,则机器原
地旋转。 5、大臂升降\摆动操作手柄: 手柄向前推,升降油缸收缩,大臂下降; 手柄向后拉,升降油缸伸出,大臂上升; 手柄向前推,大臂向左摆动; 手柄向后拉,大臂向右摆动;
2017年04月16
山东煤炭技术学院培训中心
操作中的安全措施
6. 操作时小心挖斗碰到驾驶室或推土铲,否则可能引 起严重的人员伤害或者机器损害;
7. 在进行摆动操作前,确保摆动区域内无人或其他障 碍物;
8. 侧挖时应先利用设备挖掘一沟槽,使机器底盘卧于 沟槽内才可进行侧挖作业,否则会造成人身或设备 损害;
2017年04月16
山东煤炭技术学院培训中心
操作中的安全措施
禁止操作 1、不要使用机器的牵引力来挖掘,这样会给机器结构、前端的工
作装置施加过度的压力,造成严重的机器损伤; 2、不要过度借用机器的旋转力进行作业,这样会给机器结构、前
端的工作装置施加过度的压力,会造成工作装置及旋转装置的 严重损坏,同时也会造成严重的人身伤亡; 3、不要用铲斗进行捶击和敲打操作,此类操作会损坏机器和部件, 也会导致人员伤亡; 4、电机禁止反转,否则会损坏油泵; 5、除规定的功能外,不能滥用作其他用用途; 6、不得多次往复甩动铲斗和臂油缸,此类操作会损坏油缸;
3.停车 I 将大臂转至向前位置,将铲斗降到地面上;
II 将各手柄及踏板置于中间位置;
III 按下先导开关按钮; IV 关闭电机,切断电源;
得到最大的挖掘力; III 总是要把铲斗齿方向朝着准备挖掘的方向,并在较
浅的深度进行挖掘,这样可以减少挖掘阻力和斗齿 的损坏; IV 平滑地操作小臂,小心地移动控制杆,不要突然移 动或停止小臂运动,这样会对机器和它的部件造成 不必要的压力。
2017年04月16
山东煤炭技术学院培训中心
2.装载作业
将刮板输送机与机器保持一合适距离,可减小机 器的回转角度以及挪车次数,大大提高装载效率; 装载作业时注意保护工作装置,防止其与其他设备 及巷道侧壁产生磕碰。
2017年04月16
山东煤炭技术学院培训中心
操作说明
6、先导开关按钮:提起按钮,先导油路导通,各先导 手柄起作用;按下按钮,先导油路断开,各先导手 柄不起作用;
7、起动器远控按钮:该按钮位于司机坐椅左后侧,绿 色为启动,红色为停止。
8、电铃按钮:位于司机坐椅右侧,颜色为红色。 9、起动器启动按钮:该按钮位于电磁起动器右侧,绿
2017年04月16
山东煤炭技术学院培训中心
安全预防措施
基本预防措施 1. 在操作、维护以及修理前,阅读和理解机器及说明书上所有安全警示标
志; 2. 在机器上工作时,不要穿戴宽松或破的衣服,不要佩戴戒指、松动的首
饰; 3. 在上车前和下车前必须保证切断电源,防止上下车时误碰操作手柄; 4. 在对其进行维修时,要将机器停在一个水平、平稳的位置,防止在机器
9. 在设备行走或作业时侧面严禁站人,以免设备倾翻 或侧滑,造成人身伤害。
10. 在斜面或斜坡上行驶时,要格外小心,机器倾翻 或滑动都会造成伤亡或机器损坏。绝对不要在斜面 上摆动大臂或转弯;
2017年04月16
山东煤炭技术学院培训中心
操作中的安全措施
11. 在行驶时,保持挖斗高于地面30-40 厘米,在粗 糙的地面上,以慢速行驶,不要急转弯,切勿强行 通过障碍物;
4. 操作前电动机启动时,先点动数次,一是观察电动机的旋转方 向是否按箭头指示方向(或面向电动机后端盖排风扇顺时针旋 转),二是给液压系统充满液压油。
5. 在开始工作前,缓慢操作控制手柄,确保其反应与其功能相符, 在进行行走控制前应先按响电铃,提醒其他人员,确认行走马 达的位置,如果行走马达在前面,注意此时的行驶功能刚好相 反;