极化SAR影像分类综述
极化SAR影像分类综述

基于目标分解的极化SAR图像分类摘要:极化SAR图像分类是SAR图像解译的重要内容,从现有的文献来看,基于目标分解理论的极化SAR图像分类算法是所有分类算法中较为实用、准确,且发展较快的。
以此为研究背景,论文首先介绍了雷达极化的基础理论,并在此基础上系统地分析了当前各种典型目标分解算法的特性,最后总结了几种典型的基于目标分解理论的极化SAR图像分类算法。
关键词:极化SAR 目标分解图像分类1引言极化合成孔径雷达(SAR )通过测量地面每个分辨单元内的散射回波,进而获得其极化散射矩阵以及Stokes矩阵。
极化散射矩阵将目标散射的能量特性、相位特性和极化特性统一起来,相对完整地描述了雷达目标的电磁散射特性,为更加深入地研究地物目标提供了重要的依据,极大地增强了成像雷达对目标信息的获取能力。
从极化SAR图像数据中,我们可以提取目标的极化散射特性,从而实现全极化数据的分类和聚类等其他应用。
这需要我们对极化数据进行分析,有效地分离出目标的散射特性,其理论核心是目标分解。
目标分解理论是Po1SA R图像处理技术中最基本的方法,目标分解的主要目的是把极化散射矩阵或相干矩阵和协方差矩阵分解成代表不同散射机理的若干项之和,每一项对应一定的物理意义。
目标分解的突出优点就是它们大都具有明确的物理解释。
因为目标回波的极化信息可以反映目标的几何结构和物理特性,所以极化目标分解理论可用于目标检测或分类。
目前,极化目标分解理论主要分为基于散射矩阵分解的相干目标分解方法和基于协方差矩阵或相干矩阵的部分相干目标分解两类。
本文从目标分解的基本理论出发,对这些分解方法进行了归纳和分析,以便对这些分解方法进行深刻的把握。
为目标分解方法应用于SAR图像分类提供一些参考。
2 极化SAR图像的基本理论2.1 极化合成孔径雷达概述极化合成孔径雷达是合成孔径雷达向多功能方向发展的一个重要内容,它能有效提高获取目标信息的能力,为提高目标分类的精度提供了有力的工具。
极化SAR影像边缘检测综述
a a zd whc r n e ed tc o fS R i g sa n t s gep l ie mae , ee i ig dtcosaecas e , n l e ih ae i k eet n o A mae l g wi i l oa zd i g st xsn e tr r lsi d y i o h n r h t e i f
t n i l n d e e e t n I h s e iw , d e ee t n o p l r ti S e ta i e g d t ci . t i r v e e g d t c i f r o a i rc AR i g s s t d e s se t a l t e s u s l o n o me ma e i su i d y t ma i l h is e a e c y,
1 . 武汉大 学 测绘遥感信 息工程国家重 点实验 室 , 武汉 4 0 7 309
2中国测绘科 学研 究院 , . 北京 10 3 080
1S ae Ke b f r I f r ai n En i e rn n S r e i g M a p n & Re  ̄ S n i g W u a i e s y W u a 3 0 9 C i a . tt y La o n o m t g n e i g i u v y n , p i g o mo e s , h n Un v r i , h n 4 0 7 , h n n t
2C ieeA a e fS re ig a d Mapn , e ig 1 0 3 , hn .hn s cd my o uvyn n p ig B in 8 0 C ia j 0
DENG S a p n , h o i g ZHANG i i n, n x a gRe e J x a LI Pi g i n . f w o d e d t c i n r m p l rm e rc S i f e g e e to fo o a i t i AR i a e yCo p t r En m g r. m ue -
第六章 极化sar 第三节

⎡1 0 0 1⎤
C=
k
2 0
l
4
⎢⎢0
0
0
0⎥⎥
24π 2 ⎢0 0 0 0⎥
⎢⎣1 0 0 1⎥⎦
导电球/三面角反射器
共极化响应
交叉极化响应
除了乘性系数不同之外,三面角反射器与导电球的散射矩阵具有 类似的形式。
4
二面角反射器
v 2b
a h
S
=
k 0 ab π
⎡− cos 2α ⎢⎣ sin 2α
⎡ 1 0 1/ 3⎤
[C3 ] V
=
f
v
⎢ ⎢
0
2/3
0
⎥ ⎥
⎢⎣1/ 3 0 1 ⎥⎦
⎡α 2
[C 3 ] d
=
⎢ fd ⎢
0
⎢ ⎣
α
*
0 α⎤
⎥
0 0⎥
0
1
⎥ ⎦
⎡β 2 0 β⎤
[C 3 ] s
=
⎢ fs ⎢
0
⎥ 0 0⎥
⎢ ⎣
β
*
0
1
⎥ ⎦
Freeman-Wishart分类流程图
36
Freeman-Wishart分类
Wishart分类器 输入参数A(A>0.5为一 类,A<0.5为另一类)
Wishart分类器 得到最终分类图
结束
H/a/A-Wishart分类器
34
Freeman-Wishart分类
极化SAR分类
9 Complex Wishart distribution(Lee et al.,1994) 9 Wishart+Entropy/Alpha(Lee et al.,1999) 9 Wishart+Entropy/Alpha/Anisotropy(Pottier and Lee,2000) 9 不足:Wishart分类器是统计算子。不同散射机制的像素可能混
单极化SAR影像变化检测方法

虚警率指的是将未发生变化的 像素误判为变化的像素的比例 ,而漏警率则是将实际发生变 化的像素漏判为未变化的像素 的比例。这两个指标用于衡量 方法的稳健性和敏感性。
变化检测方法的运行时间在实 际应用中也是一个需要考虑的 因素。我们对所提出的方法和 基准方法的运行时间进行了比 较,以评估其效率。
结果展示与分析
SAR影像中的噪声(如斑点噪声)对变化检测产生干扰,可能导致误检 或漏检。
03
地表复杂性和动态性
地表特征复杂多变,如城市区域的建筑密度、植被区域的生物量变化等
,对SAR影像变化检测算法提出更高要求。
02
单极化SAR影像预处理
辐射定标
消除系统误差
辐射定标的目的是消除传感器本身产生的系统误差,确保数据的准确性和可靠性 。
实验设置
我们采用了两种常用的变化检测方法作为基 准方法,分别是基于像素的方法和基于对象 的方法。为了验证我们所提出的方法的有效 性,我们将它与这两种基准方法进行了比较 。实验中的参数设置均根据相应方法的建议 进行调整,以确保公平的比较。
评价标准
准确率
虚警率和漏警率
运行时间
准确率是衡量变化检测结果与 真实变化之间一致性的重要指 标。我们计算了整体准确率以 及各类变化的准确率,以全面 评估方法的性能。
特征提取总结:特征提取是单极化 SAR影像变化检测中的关键环节,它 能够提取出影像中的关键信息,并降 低数据的维度。在本文中,我们介绍 了多种常用的特征提取方法,包括纹 理特征、形状特征和统计特征等,并 探讨了它们在变化检测中的应用。通 过这些方法,我们能够更高效地表示 和比较不同时相的SAR影像,进而检 测出地表的变化。
建立物理模型
通过辐射定标,可以建立SAR影像像素值与地物后向散射系数之间的物理模型, 为后续的变化检测提供可定量的依据。
遥感问答之SAR、InSAR、D-InSAR
遥感问答之SAR、InSAR、D-InSAR ⼩课堂在地质灾害监测相关场合中经常会出现“SAR”、“InSAR”、“D-InSAR”这些名词的⾝影,那么是如何⼯作的?针对这些问题,在什么是SAR? SAR有什么特征?InSAR、D-InSAR是如何⼯作的?究竟什么是这⾥和⼤家⼀起学习⼀下关于SAR的那些事。
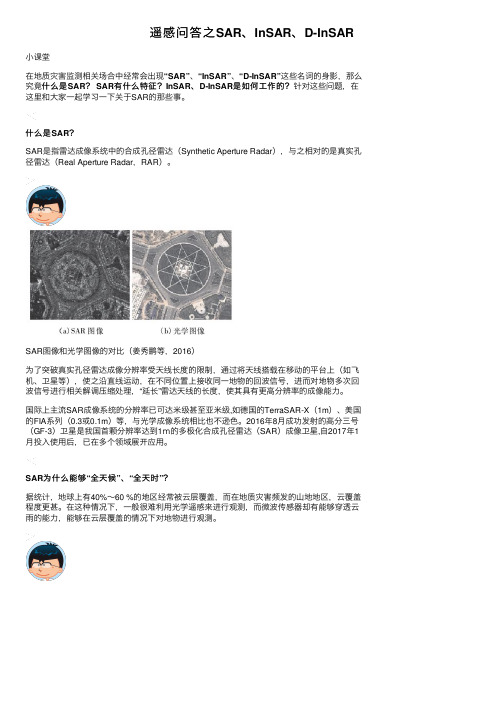
什么是SAR?SAR是指雷达成像系统中的合成孔径雷达(Synthetic Aperture Radar),与之相对的是真实孔径雷达(Real Aperture Radar,RAR)。
SAR图像和光学图像的对⽐(姜秀鹏等,2016)为了突破真实孔径雷达成像分辨率受天线长度的限制,通过将天线搭载在移动的平台上(如飞机、卫星等),使之沿直线运动,在不同位置上接收同⼀地物的回波信号,进⽽对地物多次回波信号进⾏相关解调压缩处理,“延长”雷达天线的长度,使其具有更⾼分辨率的成像能⼒。
国际上主流SAR成像系统的分辨率已可达⽶级甚⾄亚⽶级,如德国的TerraSAR-X(1m)、美国的FIA系列(0.3或0.1m)等,与光学成像系统相⽐也不逊⾊。
2016年8⽉成功发射的⾼分三号(GF-3)卫星是我国⾸颗分辨率达到1m的多极化合成孔径雷达(SAR)成像卫星,⾃2017年1⽉投⼊使⽤后,已在多个领域展开应⽤。
SAR为什么能够“全天候”、“全天时”?据统计,地球上有40%~60 %的地区经常被云层覆盖,⽽在地质灾害频发的⼭地地区,云覆盖程度更甚。
在这种情况下,⼀般很难利⽤光学遥感来进⾏观测,⽽微波传感器却有能够穿透云⾬的能⼒,能够在云层覆盖的情况下对地物进⾏观测。
微波传感器(ASAR,灰⾊图)的云穿透效果,彩⾊底图底图为光学传感器(MERIS)(图源:Space in Images© ESA)根据传感器能够接受电磁波频率的不同,可将对地观测系统⼤致可分为两类,即光学遥感和微波遥感。
微波的波长处于1mm~1000 mm范围内,⾜够长的波长使其能够绕过云层的粒⼦结构进⾏传播,也就是“衍射现象”;波长⼤于3 cm的微波甚⾄可以在⼤⾬环境下传播。
极化sar影像分类
极化sar影像分类
极化SAR影像分类(Polarimetric Synthetic Aperture Radar Image Classification)是使用极化合成孔径雷达(Polarimetric SAR)影像进行分类任务的一种方法。
极化SAR影像分类通常涉及以下步骤:
1. 数据获取:从极化SAR传感器获取极化SAR影像数据,这
些数据包含了目标的极化信息。
2. 极化特征提取:将极化SAR影像转换为表示极化信息的特
征向量。
常见的极化特征包括极化散射矩阵、极化度、相干矩阵等。
3. 特征选择:对提取的极化特征进行选择,选择能够最有效地区分不同类别的特征。
4. 训练分类器:使用已标记的样本训练分类器,将提取的特征与其对应的类别进行训练。
常用的分类器包括支持向量机(Support Vector Machine)、随机森林(Random Forest)等。
5. 分类预测:使用训练好的分类器对新的极化SAR影像进行
分类预测。
极化SAR影像分类在军事、环境、农业等领域具有广泛应用。
例如,在军事领域,可以利用极化SAR影像分类识别目标类型,如舰船、车辆等,以实现目标识别和目标辨别任务。
在环
境领域,可以使用极化SAR影像分类来监测土地覆盖变化、湿地变化等。
在农业领域,可以利用极化SAR影像分类来识别农作物类型、盐渍土地等。
总而言之,极化SAR影像分类是一种基于极化合成孔径雷达影像的分类方法,可以在不同领域中应用于目标识别、环境监测等任务中。
不同分解方法的极化SAR数据分类
不同分解方法的极化SAR数据分类由于平时分类的时候,一般采用的是Cloude 分解的得到的特征值进行分类的。
而对于不同的数据,分解方式的不同,相应的分类结果也存在一定的差异,而且对于不同类型的数据,其最优分解方法并不一定是Cloude 分解。
所以对两组数据(旧金山数据和海南数据)进行基于不同分解方法的分类实验,对比不同分解下的效果。
这部分实验首先对数据进行极化分解,然后利用分解得到的特征量进行分类。
共进行了基于Cloude ,Freeman2,Freeman3,Krogager ,Vanzel ,Yamaguchi3,Yamaguchi4,7种特征分解的分类实验,分类算法采用的基于Wishart 分布的最大似然分类器。
旧金山数据的7种分解方法的分类结果Cloude 是用的最多的分解方法,除了把数据分解为与散射机制有关的三个特征值321,,λλλ(分别代表三种散射机制:平面散射,二面角散射和体散射),还有具有旋转不变性的散射角a 和熵H 。
所以基于cloude 分解的分类结果较为平稳。
而对于其他6种分解方式,都是把数据分解为与某种散射机制类型对应的参数,代表该散射类型的强度,不具有旋转不变性的参数,所以适用数据的类型并不是很广,所以不像Cloude 分解那样对各种类型的数据都适用。
从下面7幅分类结果看到,基于Cloude 分解的分类结果整体分类效果较好,不存在大范围的错误分类区。
但是其他6种分解方式的分类结果,海洋均被划分为多个层次,所以这6种分解方式对海洋的分类适用性不好。
但是对比7个分类结果发现,每种分解的分类结果各有优势,如Yamaguchi4和Freeman2中植被和城区的划分效果较好,马球场和高尔夫球场结构完整,而且城区内部道路细节分明,效果均优于Cloude 分解的分类结果。
图1(a)基于Cloude 分解的分类结果图1(b)基于Vanzel 分解的分类结果图1(c)基于Freeman2分解的分类结果图图1(d)基于Freeman3分解的分类结果图1(e)基于Yamaguchi3分解的分类结果图1(f)基于Yamaguchi4分解的分类结果图1(g)基于Krogager分解的分类结果一、基于多极化和多波段数据的分类研究由于全极化数据记录了4种极化方式下的地物散射回波信息,记录的物理和散射信息更加全面,所以全极化数据的分类效果一般是优于双极化或者单极化的。
基础知识:SAR成像原理及SAR图像解译要点
基础知识:SAR成像原理及SAR图像解译要点⼀、雷达原理简介1、雷达原理(测距)2、雷达分辨率⼆、SAR原理简介1、基本概念2、优缺点3、成像⼏何4、成像原理5、⼯作模式三、SAR图像特点1、SAR图像整体特点2、斜距投影3、透视收缩4、叠掩5、阴影6、地形对图像亮度的影响7、区分⼏何形变8、理解⼏何形变9、后向散射特征10、地物⽬标的类型11、不同探测⽅向对成像的影响12、不同极化对成像的影响13、相⼲斑噪声成因及多视处理14、旁瓣对SAR成像的影响15、多次反射对成像的影响16、SAR穿透能⼒17、SAR典型⽬标(多图)18、SAR⽬标活动轨迹19、运动⽬标成像20、SAR/GMTI21、运动补偿及散焦22、对海⾯舰船⽬标成像效果较差的原因四、SAR图像与⼈⼯智能下⾯内容选⾃PPT:SAR图像整体特点:1、SAR图像是斜距图像,⽅位向和距离向分辨率不⼀致(距离向分辨率较⾼,例如2m*3m),斜距图像上近距离被压缩(光学图像是远距离被压缩)。
2、SAR图像特有的⼏何特点(如透视、收缩、倒置、盲区、斜距显⽰的图像近距离压缩等)加⼤了SAR图像解译难度。
3、SAR图像固有的相⼲斑噪声使得⽬标边缘模糊、清晰度下降,也造成SAR图像解译采⽤完全不同的⽅法。
4、俯仰⾓度和⽅位⾓变化时,SAR图像会表现出较⼤的差异。
需要结合具体的观测参数对SAR 图像进⾏判读。
5、存在多次反射效应、虚假现象、多普勒频移等。
下⾯是PPT全⽂,PPT⽂件下载链接在⽂末,需要的可⾃愿选择下载学习。
双极化sar影像分类研究与应用
双极化sar影像分类研究与应用下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
本文下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Downloaded tips: This document is carefully compiled by the editor. I hope that after you download them, they can help you solve practical problems. The documents can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!随着遥感技术的不断发展,合成孔径雷达(SAR)成像技术在地球观测领域中扮演着日益重要的角色。
极化SAR图像地物分类方法综述
极化SAR 图像地物分类方法综述①魏 丹1, 李 渊1, 黄 丹21(河南大学 计算机与信息工程学院, 开封 475004)2(河南大学 实验室与设备管理处, 开封 475004)通讯作者: 黄 丹摘 要: 极化合成孔径雷达(Polarimetric Synthetic Aperture Radar, PolSAR)是一种微波成像雷达, 它不受天气、光线以及云层的影响, 能够实现全天时、全天候的成像. 因此, 极化SAR 图像已经成为遥感图像地物分类的主要数据源之一. 本文从技术方法的角度出发, 论述了近年来国内外极化SAR 图像地物分类的方法及应用, 从技术原理、实验效果等方面进行介绍, 并对极化SAR 图像地物分类的发展趋势进行分析.关键词: 极化; 合成孔径雷达; 遥感; 地物分类; 发展趋势引用格式: 魏丹,李渊,黄丹.极化SAR 图像地物分类方法综述.计算机系统应用,2020,29(11):29–39. /1003-3254/7705.htmlOverview on Methods of Land Classification Based on Polarimetric SAR ImagesWEI Dan 1, LI Yuan 1, HUANG Dan 21(School of Computer and Information Engineering, Henan University, Kaifeng 475004, China)2(Dvision of Laboratory and Equipment Management, Henan University, Kaifeng 475004, China)Abstract : Polarimetric Synthetic Aperture Radar (PolSAR) is a type of microwave imaging radar that avoids the influence of weather, light and clouds, and it has the capability of all-day and all-weather imaging. Therefore, PolSAR images have become one of the main data sources for land classification based on remote sensing image. From the perspective of technical methods, this paper discusses the methods and applications of land classification based on PolSAR image in recent years. It introduces the technical methods and experimental effects, and analyzes the development trend of land classification based on PolSAR image.Key words : polarimetric; SAR; remote sensing; land classification; development trend近年来, 随着极化SAR 系统的不断发展, 可用的极化SAR 数据逐渐增多, 分辨率也在不断提高. 与单极化SAR 相比, 极化SAR 进行的是全极化测量, 可以获取更丰富的目标信息, 因此极化SAR 的应用也越来越广泛[1]. 采用极化SAR 图像进行地物分类是极化SAR 技术在实际应用中的一个重要发展方向, 也是SAR 图像解译的重要研究内容.通常地表地物类型是草地、森林、农田、城区、水域和裸地等, 采用极化SAR 图像对这些地物类型的分类研究可以在民用领域和军用领域为人们提供帮助.在民用领域可以对农作物的生长、城市的变迁等进行监测, 也可以测量土壤水分和对矿产资源进行勘探; 在军用领域, 可以识别战略目标, 为之后的战略部署等方面提供理论依据. 由以上可知, 极化SAR 图像已经成计算机系统应用 ISSN 1003-3254, CODEN CSAOBNE-mail: Computer Systems & Applications,2020,29(11):29−39 [doi: 10.15888/ki.csa.007705] ©中国科学院软件研究所版权所有.Tel: +86-10-62661041① 基金项目: 国家自然科学基金(U1604145, 61871175); 河南省高等学校重点科研项目(19A420005); 河南省科技攻关计划(182102210233, 192102210082); 河南省青年人才托举工程(2019HYTP006)Foundation item: National Natural Science Foundation of China (U1604145, 61871175); Key Research Project of Higher Education of Henan Province (19A420005); Science and Technology Program of Henan Province (182102210233, 192102210082); Youth Talent Lifting Project of Henan Province (2019HYTP006)收稿时间: 2020-05-01; 修改时间: 2020-05-27; 采用时间: 2020-06-05; csa 在线出版时间: 2020-10-29为地理环境监测的重要组成部分. 目前在区域乃至全球的地表地物分类中, 采用极化SAR图像进行地物分类表现出巨大的应用前景和潜力.极化SAR系统按照载体的不同可以分为机载SAR[2–8]和星载SAR[9–15], 部分机载和星载极化SAR 系统如表1和表2所示. 表2中, 高分三号(GF-3)卫星[15]是中国首颗民用高分辨率星载极化SAR成像卫星, 于2016年8月10日发射升空, 空间分辨率从1米到500米,幅宽从10公里到650公里, 有聚束和超精细条带等12种成像模式. 随着极化SAR数据的增多, 如何有效地利用其数据特征实现更精确地分类成为了当今研究的热门问题.表1 典型机载极化SAR系统机载极化SAR系统国家波段启用年份(年) AIRSAR美国P/L/C1987ESAR德国P/L/C/X1988EMISAR丹麦L/C1995Pi-SAR日本L/X1996F-SAR德国P/L/S/C/X2006UAVSAR美国L2006高分辨率全极化系统中国X2008表2 典型星载极化SAR系统星载极化SAR系统国家波段启用年份(年)SIR-C/X-SAR美国L/C1994ALOS-1/PALSAR日本L2006TerraSAR-X姊妹星德国X2007 Radarsat-2加拿大C2007RISAT-1印度C2012 ALOS-2/PALSAR-2日本L2014高分三号中国C2016本文结构安排如下: 第1节对近几年极化SAR图像地物分类方法及其应用进行总结和论述, 第2节对极化SAR图像地物分类的发展趋势进行分析, 第3节对本文进行总结.1 极化SAR图像地物分类的方法当雷达发射的电磁波接触地物时, 不同地物对应的雷达回波信息也不同, 所以极化SAR图像中每个像元所展示的信息也不同. 对极化SAR图像进行地物分类的实质是将图像的所有像元按其性质分为若干个类别的过程, 从而达到对地物进行分类的目的.极化SAR图像进行地物分类的基本步骤为: 预处理→特征提取→分类处理. 预处理通常包括斑点滤波、几何校正和去取向角等. 特征提取一般为纹理特征提取和极化特征提取. 纹理特征的提取方法有局部傅立叶变换、曲波变换、Gabor小波和灰度共生矩阵等[16]. 极化特征可以通过目标分解获得, 其中比较著名的分解有Pauli分解[17]、Cloude分解[17]、Krogager 分解[18]、Freeman分解[19]、SSCM分解[20]、Yamaguchi四分量分解[21,22]、Touzi分解[23]和六分量分解[24]等.对极化SAR图像进行地物分类处理的方法多种多样, 根据所用特征信息的不同, 可以将分类方法归结为基于极化目标散射特性的分类、基于统计分析的分类、基于目标散射特性和统计方法相结合的分类. 根据分类过程中是否需要人工标记样本, 可以分为监督分类、无监督分类和半监督分类3大类. 根据处理对象的不同可以分为基于像素级和基于对象级的分类.根据采用的技术方法的不同可以将极化SAR图像地物分类方法分为6种, 分别是主动轮廓模型法、马尔可夫随机场模型法、模糊理论法、支持向量机法、神经网络法和融合算法, 如图1所示.是否需要人工标记样本所用特征信息处理对象技术方法极化 SAR 图像地物分类方法基于统计分析的分类基于极化目标散射特性的分类基于目标散射特性和统计方法相结合的分类非监督分类监督分类半监督分类基于主动轮廓模型的分类基于马尔可夫随机场模型的分类基于模糊理论的分类基于支持向量机的分类基于神经网络的分类基于融合算法的分类基于像素级的分类基于对象级的分类图1 极化SAR图像地物分类方法计算机系统应用2020 年 第 29 卷 第 11 期本节从技术方法的角度出发, 对近年来不同极化SAR 图像地物分类方法进行总结和论述.1.1 基于主动轮廓模型的分类1988年, Kass 等提出了一种主动轮廓模型(Active Contour Model, ACM), 该模型主要原理是通过初始化曲线, 构造能量方程式, 最小化曲线的内外部能量, 使曲线逐渐接近待检测物体的边缘, 分割出目标. ACM 方法中, 按照不同的轮廓曲线表达式可分为参数主动轮廓模型(Parametric ACM, PACM)和基于水平集的几何主动轮廓模型(Geometric ACM, GACM); 按照曲线的演化方式又可分为基于边界的主动轮廓模型(Edge-based ACM, EACM)和基于区域的主动轮廓模型(Region-Based ACM, RACM)[25]. ACM 方法有很强的抗噪声能力, 所以也被应用于极化SAR 图像分类中[26–30].但是该方法的缺点是计算量大, 效率低.2014年, 清华大学的杨健团队采用多时相水平集主动轮廓模型对AIRSAR 获取的荷兰弗莱福兰极化数据进行分类处理[30]. 图2为分类结果, 其中图2(a)为C 波段、L 波段和P 波段的波段合成图, 图2(b)为ACM 分类结果.(a) C+L+P 波段融合(b) 分类结果图2 基于ACM 的分类结果[30]1.2 基于MRF 模型的分类由于相干斑噪声的存在, 基于单个像素所提供的信息对极化SAR 图像进行地物分类, 通常不能得到令人满意的结果. 为了获得可靠和满意的结果, 分类最好是基于集群的统计度量, 而不是基于单个像素的度量.马尔可夫随机场(Markov Random Field, MRF)模型是一种概率图形模型, 它可以统计像素之间的空间上下文信息, 是处理图像分类问题的强有力工具. 在MRF 模型中, 图像特征被提取为特征场, 图像中所有像素类别标记的集合为标记场, 在已知特征场的前提下, 分类结果通过最大标记场概率获得. MRF 因其固有的抗噪声能力和减少类内差异的影响而被广泛采用. 针对极化SAR 图像地物分类问题, 各国学者提出了一系列基于MRF 模型的分类方法[31–35].2014年, Doulgeris 以Radarsat-2在C 波段采集的美国旧金山海湾极化SAR 图像为实验数据, 采用MRF 模型提取上下文信息, 对地物进行分类[35]. 图3为MRF 分类结果, 其中图3(a)为Pauli 图像, 图3(b)为分类图像, 从分类图像中可以看出有取向角的建筑物和森林植被可以被区分开来, 提高了分类精度.(a) Pauli 分解图(b) 分类结果图3 基于MRF 的分类结果[35]1.3 基于模糊理论的分类传统的极化SAR 图像地物分类方法是为每个像元指定一个特定的类, 但是极化SAR 图像中的一个像元可能包含多个地物类别, 对这类像元的分类会影响最终的分类精度, 采用模糊理论可以较好的解决此问题. 模糊理论思想是用0–1之间的值表示每个像元属于每个类的程度, 这些值被称为隶属度, 每个像元属于所有类的隶属度之和为1, 最终用隶属度的大小确定像元所属的分类. 经过多年发展, 模糊理论已经广泛用于极化SAR 图像地物分类[36–40]. 本节将介绍FCM (Fuzzy C-Means, FCM)和最近邻方法在极化SAR 图像地物分类中的应用.1.3.1 基于FCM 的分类FCM 算法的思想是把n 个数据集合A ={a 1, a 2, ···,an }分成C 个模糊组, 对每个数据集可用值在0~1之间的隶属度来确定其属于各个组的程度, 通过迭代使得非相似性指标的价值函数达到最小, FCM 流程图如图4所示.2009年, 杨然等用模糊分类方法下的FCM 算法与Yamaguchi 分解相结合, 提出了一种新的分类模型[39].2020 年 第 29 卷 第 11 期计算机系统应用该模型把四个散射分量组成一组归一化的特征矢量,进行FCM 聚类分析, 并且用日本机载L 波段PiSAR 数据验证了该算法具有较高的分类精度和较好的视觉效果. 图5是FCM 分类结果, 其中图5(a)为Niigata 地区的极化合成图, A 区为森林, B 区为人工建筑, C 区为河流, D 区和E 区都是耕地. 图5(b)是FCM 分类结果.计算隶属度矩阵进行隶属度划分, 选择新的聚类中心检查收敛情况是否否输出聚类中心是初始化: 基本参数, 聚类中心, 隶属度函数迭代次数 T <Loop图4 FCM 流程图(a) 极化合成图(b) 分类结果A 区B 区D 区E 区C区图5 基于FCM 的分类结果[39]1.3.2 基于最近邻的分类最近邻分类的原理是通过确定分类类别, 选择正确的不同类别样本, 计算测试样本与所有样本之间的距离, 并将距离转换为0–1之间隶属度, 如果隶属度大于设定的隶属度阈值, 则测试样本属于与它距离最近的样本所属的类别.2018年, 陆翔等采用极化目标分解得到的极化散射特性和用灰度共生矩阵提取的纹理信息作为特征,应用模糊分类方法下的最近邻分类器对TerraSAR-X 在X 波段采集的云南西双版纳勐腊县极化SAR 图像进行地物分类, 图6为分类结果[40]. 其中图6(a)是勐腊县光学影像, 图6(b)为地物分类结果图, 图6(c)为不同地物的颜色表示.(a) 光学图像(b) 分类图像城区裸地裸地农地天然林地橡胶林地(c) 地物颜色编码图6 基于最近邻的分类结果[40]1.4 基于支持向量机的分类支持向量机(Support Vector Machines, SVM)是一种性能很强的分类器, 它的基本思想为: 建立一个分类超平面作为决策曲面, 使得不同样本的隔离边缘最大.如图7所示, 圆圈和正方形分别代表了两种类型的样本, H 为分类超平面, H1与H2为通过各类样本中最边缘的点, 且与H 相互平行、距离相等的平面, 它们之间的距离是分类间隔. 最优分类超平面就是以最大间隔将两类样本分开的超平面. 1999年, Vapnik 团队第一次将SVM 用到图像的分类当中[41]. 经过多年的发展,SVM 也广泛用于极化SAR 图像的分类中[42–47].2019年, 张腊梅提出了一种改进的SVM 算法, 该算法结合了Pinball 损失函数, 并将多成分目标分解,计算机系统应用2020 年 第 29 卷 第 11 期ααH/A/分解以及灰度共生矩阵方法分别提取到的12种极化特征和纹理特征作为SVM 的训练样本[42]. 这里的12种特征分别是奇次散射功率Ps 、偶次散射功率Pd 和体散射功率Pv 、极化散射熵H 、极化各向异性度A 、平均散射角、能量ENY 、熵ENT 、对比度CON 、反差矩IDM 、相关度COR 及和平均SAV. 并对EMISAR 在Foulum 地区获取的L 波段极化SAR 数据进行分类处理, 把地物分为建筑物、森林、裸地、细径作物、阔叶作物5种类型. 图8为分类结果,其中图8(a)为Pauli 图像, 图8(b)为改进SVM 分类图像, 图8(c)为不同地物的颜色表示.HH 1H 22margin=W图7 最优分类超平面示意图(a) Pauli 分解图(b) 分类结果阔叶作物建筑物细径作物森林裸地(c) 地物颜色编码图8 基于SVM 的分类结果[42]1.5 基于神经网络的分类传统分类算法在进行极化SAR 图像地物分类时,需要人工提取分类特征, 而神经网络是一种以人脑为模型的机器学习算法, 可以自动的提取分类特征, 在特征学习时不需要过多的人工干预, 通过对大量样本进行内部特征分析, 可以得到更好的分类效果. 1991年,Pottier 等第一次利用人工多层感知神经网络对极化SAR 图像进行了分类研究. 经过多年的发展, 神经网络算法已经广泛用于极化SAR 图像的分类当中[48–59].2018年, 张腊梅等将传统卷积神经网络改进为三维卷积神经网络(3D CNN)[57]. 并对UAVSAR 系统采集的美国旧金山海湾某港口极化SAR 图像进行地物分类, 该地区地物种类丰富, 共有11种地物类型, 包括浅海、海洋、森林、人造目标、道路、植被、平坦裸地、粗糙裸地及3种农田地区, 分类结果如图9所示,其中图9(a)是Pauli 图像, 图9(b)是三维卷积神经网络分类图像.(a) Pauli 分解图(b) 分类结果图9 基于3D CNN 的分类结果[57]2019年, 刘旭等提出了采用极化卷积神经网络(Polarimetric Convolutional Network, PCN)对极化SAR 图像进行地物分类的方法[58]. 该方法采用极化散射编码方式来处理极化散射矩阵, 该编码模式可以完全保持散射矩阵的极化信息, 避免了将矩阵分解成一维向量, 并获得一个二维矩阵. 针对这种编码模式, 刘旭等人设计了一种基于卷积神经网络的算法, 并将其命名为PCN, 用于对极化SAR 图像进行分类处理. 图10展示了RadarSat-2在C 波段获取的荷兰弗莱福兰极化SAR 图像进行分类处理的结果. 其中图10(a)是荷兰弗莱福兰Pauli 分解图像, 图10(b)是PCN 分类结果, 图10(c)为不同地物的颜色表示. 结果表明该方法取得了较好的分类效果, 具有巨大的极化SAR 数据分2020 年 第 29 卷 第 11 期计算机系统应用类潜力.1.6 基于融合算法的分类上述各种算法都有其固有的特点, 在极化SAR 图像地物分类中也都取得了有效的研究成果, 推动了极化SAR 图像地物分类的发展, 基于上述分类方法的不同特点, 研究者们提出将两种或多种算法进行融合, 以提高分类精度[60–66].(a) Pauli 分解图(b) 分类结果城市森林水农田(c) 地物颜色编码图10 基于PCN 的分类结果[58]2018年, Xie 等提出了一种新的极化SAR 图像分类模型, 该模型首先结合Wishart 分布与自动编码器(Auto-Encoder, AE)神经网络提出了WAE (Wishart-Auto-Encoder)分类模型, 之后又结合K-means 聚类算法提出了Clustering-WAE 分类模型以提高分类能力[62].并对RadarSat-2采集的西安地区极化SAR 图像进行地物分类处理, 结果如图11所示. 其中图11(a)是西安地区Pauli 分解图, 图11(b)~图11(e)分别是K-means 算法、Wishart 算法、AE 算法、WAE 算法分类结果,图11(f)是Clustering-WAE 融合算法分类结果, 图11(g)为不同地物的颜色表示. 分类结果表示, Clustering-WAE 融合算法分类效果要优于其他算法.2018年, Guo 等将模糊理论应用到超像素提取中,采用FCM 算法并对ESAR 获取的德国奥伯菲芬-霍芬地区极化SAR 图像进行模糊超像素提取, 之后采用SVM 对图像进行地物分类[63], 结果如图12所示. 其中图12(a)是Pauli 图像; 图12(b)是地面真实图; 图12(c)超像素提取结果图; 图12(d)为分类结果与地面真实地物比较图, 图中黑色部分表示分类结果与地面真实地物不一致;图12(e)是不同地物的颜色表示.1.7 各方法优缺点上述各方法在极化SAR 图像地物分类中都有其优缺点, 具体如表3所示.(a) Pauli 分解图(b) K-mean(c) Wishart(d) AE(e) WAE (f) Clustering-WAE城市河流裸地(g) 地物颜色编码图11 西安地区地物分类图[62]这些方法中, 主动轮廓模型因考虑了轮廓内外部信息, 可以获得较为平滑的分割轮廓, 但是其计算量大,且易受噪声影响, 该方法适用于较均匀, 场景较小的图像. MRF 模型在图像分类时考虑了像素点的空间上下文信息, 所以其抗噪声能力强, 但是计算量较大, 也只适用于场景较小的图像. 模糊理论可以解决图像中的模糊像素问题, 但只适用于分辨率较低的图像. 神经网络整体分类精度高, 对噪声有很强的鲁棒性, 但是需要大量样本集进行训练, 所以适用于有大量样本集的场景. 相比于神经网络, 支持向量机适用于小样本集的场景, 但是该方法中的一些参数需要凭实验和经验来进行设置. 融合算法可以综合多种算法的优点, 但是其算法复杂度较高, 根据其算法的不同, 不同的融合算法也适用于不同的场景.计算机系统应用2020 年 第 29 卷 第 11 期(e) 地物颜色编码(a) Pauli 分解图(b) 地面真实图(c) 模糊超像素分割(d) 比较图建筑林地开阔地图12 奥伯菲芬-霍芬地区地物分类图[63]表3 分类方法优缺点算法优点缺点适用场景主动轮廓模型考虑了轮廓内外部信息, 可获得较为平滑的分割轮廓计算量大, 效率低,在非均匀图像中易受噪声干扰较均匀, 场景较小的图像MRF 模型可以统计空间上下文信息计算量大, 只能描述较小邻域间的交互场景较小的图像模糊理论可以解决图像中的模糊性问题不适用于分辨率高的图像分辨率较低的图像支持向量机能较好的解决小样本,非线性, 高维数据和局部极小值等实际问题样本训练时间长,一些参数需要凭实验和经验来设置小样本集的场景神经网络分类准确度高, 对噪声有较强的鲁棒性, 能提取高级特征不能观察之间的学习过程, 需要大量样本集有大量样本集的场景融合算法可以综合多种算法优点算法复杂度高根据融合算法的不同, 适用于不同的场景2 极化SAR 图像地物分类发展趋势在极化SAR 图像分类中, 基于SVM 、MRF 模型、模糊理论、神经网络等的分类方法仍是主流方法,也取得了不错的分类效果, 但是仍然存在一些困难, 如计算量大、分类特征不多、不适用于复杂环境等. 而且在进行分类时, 分类的效果会与相干斑噪声、雷达的工作波段以及地物的类型等因素有关. 随着极化SAR 图像地物分类技术的发展, 更多研究人员将深度学习技术, 多波段融合技术引入到极化SAR 图像地物分类当中, 并着力于发现新的分类特征. 这些不断涌现的新思路、新方法指示着未来极化SAR 图像地物分类的发展趋势, 大致可以归为以下几点.2.1 新的分类特征在极化SAR 图像地物分类中, 特征提取是其中重要的步骤, 常用的分类特征有纹理特征和极化特征. 基于这些特征, 研究者们结合着分类器对极化SAR 图像进行地物分类, 近年来, 一些新的分类特征不断涌现,以提高分类性能.2014年, Uhlmann 等利用伪彩图提取强大的颜色特征, 并首次将其用于极化SAR 图像地物分类, 结果表明, 颜色特征具有较好的鲁棒性, 受图像的噪声等因素的影响非常小[67]. 之后, 研究者们也逐渐将颜色特征引入到极化SAR 图像的分类当中. 如沈璐等于2017年提取颜色特征和极化特征组成特征向量, 采用SVM 分类器对极化SAR 图像进行分类[68]. 除颜色特征外,Liu 等于2019年利用极化散射编码提取稀疏散射编码特征, 这种特征可以保持数据的空间结构[58].以上研究者们所提出的新的分类特征在实际应用中都取得了非常显著的分类效果, 所以新的分类特征的发现与引入将是极化SAR 图像地物分类中的主要发展趋势.2.2 深度学习采用传统的神经网络对极化SAR 图像进行地物分类虽然能提取出分类特征, 但是没有考虑到图像本身的二维空间信息, 而深度学习使用多层神经网络对图像进行特征学习, 可以提取出更高级的特征, 充分挖掘数据信息, 很大程度上提高了分类精度, 分类结果也表现更加稳定. 深度学习也是目前极化SAR 图像地物分类中, 最常用和分类效果最好的方法.目前, 有大量研究者们采用深度学习方法对极化SAR 图像进行地物分类. 如2016年, Liu 等采用深度置信网络(Deep Belief Network, DBN)对西安地区极化SAR 图像进行地物分类[69]. 2016年, Jiao 等结合深度堆叠网络(Deep Stacking Network, DSN)和Wishart 距离提出了W-DSN 模型, 并对荷兰弗莱福兰极化SAR 图像进行分类[60]. 2019年, Liu 等采用生成对抗网络2020 年 第 29 卷 第 11 期计算机系统应用(Generative Adversarial Network, GAN)对西安地区极化SAR图像进行地物分类[70]. 这些深度学习方法在极化SAR图像地物分类过程中都取得了非常精确的分类效果.由上述可知, 深度学习方法已经成为目前极化SAR图像地物分类的主流方法. 可是深度学习依靠大量样本的学习, 目前公开的极化SAR图像地物样本数据集少之又少, 研究者们应首先考虑如何做出一个具有代表性的极化SAR图像地物样本数据集.2.3 多波段融合极化SAR图像成像信息不仅与地物类型有关, 还与雷达发射波的波长有关, 不同波段的极化SAR其传输特性、目标回波的后向散射特性等不同, 相同的物体也有可能呈现不同的表现形式[71]. 在地物分类方面, 不同波段的极化SAR数据, 在实际测量中有着不同的优势, 如高频波段极化SAR图像对地物的纹理描述清晰,有利于区分纹理差异较大的地物, 如城区和裸地等. 低频波段极化SAR图像对地物湿度和植被情况比较敏感,有利于区分具有不同含水量的地物, 如旱地和沼泽地等.综上所述, 不同波段的极化SAR系统在实际测量中都有其特点和优势, 因此研究者们利用信息融合技术将多波段极化SAR图像进行波段融合, 获取更丰富的目标信息以获得更好的地物分类效果. 如2014年,杨健团队将C波段、L波段和P波段极化SAR图像进行融合, 之后采用水平集方法对地物进行分类, 结果表明相比于单波段极化SAR数据, 采用组合多波段数据进行地物分类的效果更好[30]. 因此, 将同一地区多波段数据进行融合也是未来极化SAR图像地物分类中的重要发展方向.但是, 由于目前绝大多数星载极化SAR系统的工作波段只有一个, 所以获取同一地区的星载极化SAR 多波段数据就变得尤为困难, 就极化SAR系统的发展趋势而言, 多波段星载极化SAR系统是未来的主要发展趋势.3 结束语本文首先介绍了采用极化SAR图像进行地物分类的好处和重要性, 总结了近年来在国内外公开发表的基于极化SAR图像进行地物分类的研究成果, 并对其研究成果进行了简要概述. 基于这些方法的大量研究, 许多创新方法也在不断涌现, 如引入新的分类特征;将深度学习技术引入到分类当中; 利用信息融合技术将多波段数据进行波段融合, 这些方法都极大推动了极化SAR图像分类的发展.纵观极化SAR图像地物分类史, 新的研究成果在不断增加地物分类的准确度, 也在不断增强着地物分类的实用性. 但是仍然存在一些问题, 如怎样选取最适合的分类特征、同一地区多波段数据不多、如何更好地去除相干斑噪声等, 因此要加强对极化SAR技术的研究, 获取更深层次的成果. 相信在不久的将来, 极化SAR图像分类方法研究会越来越完善, 分类效果越来越精确.参考文献王超, 张红, 陈曦, 等. 全极化合成孔径雷达图像处理. 北京: 科学出版社, 2008.1Van Zyl J, Carande R, Lou Y, et al. The NASA/JPL three-frequency polarimetric AIRSAR system. Proceedings of 1992 International Geoscience and Remote Sensing Symposium. Houston, TX, USA. 1992. 649–651.2Rosen PA, Hensley S, Wheeler K, et al. UAVSAR: A new NASA airborne SAR system for science and technology research. Proceedings of 2006 IEEE Conference on Radar.Verona, Italy. 2006. 22–29.3黄铁青, 赵涛, 翟金良, 等. 发挥空间信息技术优势, 服务汶川抗震救灾决策——中国科学院利用遥感与地理信息技术为汶川地震抗震救灾和恢复重建提供决策服务纪略. 遥感技术与应用, 2008, 23(4): 486–492. [doi: 10.11873/j.issn.1004-0323.2008.4.486]4Horn R, Nottensteiner A, Reigber A, et al. F-SAR-DLR’s new multifrequency polarimetric airborne SAR. Proceedings of 2009 IEEE International Geoscience and Remote Sensing Symposium. Cape Town, South Africa. 2009. II-902–II-905. 5Uratsuka S, Satake M, Kobayashi T, et al. High-resolution dual-bands interferometric and polarimetric airborne SAR (Pi-SAR) and its applications. Proceedings of IEEE International Geoscience and Remote Sensing Symposium.Toronto, ON, Canada. 2002. 1720–1722.6Horn R. The DLR airborne SAR project E-SAR. Proceedings of 1996 International Geoscience and Remote Sensing Symposium. Lincoln, NE, USA. 1996. 1624–1628.7Christensen EL, Dall J, Skou N, et al. EMISAR: C- and L-band polarimetric and interferometric SAR. Proceedings of 1996 International Geoscience and Remote Sensing Symposium. Lincoln, NE, USA. 1996. 1629–1632.8Melsheimer C, Bao MQ, Alpers W. Imaging of ocean waves 9计算机系统应用2020 年 第 29 卷 第 11 期。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于目标分解的极化SAR图像分类硕研2010级6班金姗姗2010010615摘要:极化SAR图像分类是SAR图像解译的重要内容,从现有的文献来看,基于目标分解理论的极化SAR图像分类算法是所有分类算法中较为实用、准确,且发展较快的。
以此为研究背景,论文首先介绍了雷达极化的基础理论,并在此基础上系统地分析了当前各种典型目标分解算法的特性,最后总结了几种典型的基于目标分解理论的极化SAR图像分类算法。
关键词:极化SAR 目标分解图像分类Abstract:Polarimetric SAR image classification is pivotal in SAR image interpretation. According to current literature, the classification algorithm for polarimetric SAR image based on target decomposition theorems is the most practical and exact one with fast developing speed among all algorithms. Under this background of research, the basic theory on radar polarimetric is discussed at first in this paper. Then the characteristic of typical target decomposition algorithms is analyzed in detail. Finally, typical polarimetric SAR image classification based on target decomposition theorems are summarized.Key words:POLSAR Target Decomposition Image Classification1引言极化合成孔径雷达(SAR )通过测量地面每个分辨单元内的散射回波,进而获得其极化散射矩阵以及Stokes矩阵。
极化散射矩阵将目标散射的能量特性、相位特性和极化特性统一起来,相对完整地描述了雷达目标的电磁散射特性,为更加深入地研究地物目标提供了重要的依据,极大地增强了成像雷达对目标信息的获取能力。
从极化SAR图像数据中,我们可以提取目标的极化散射特性,从而实现全极化数据的分类和聚类等其他应用。
这需要我们对极化数据进行分析,有效地分离出目标的散射特性,其理论核心是目标分解。
目标分解理论是Po1SA R图像处理技术中最基本的方法,目标分解的主要目的是把极化散射矩阵或相干矩阵和协方差矩阵分解成代表不同散射机理的若干项之和,每一项对应一定的物理意义。
目标分解的突出优点就是它们大都具有明确的物理解释。
因为目标回波的极化信息可以反映目标的几何结构和物理特性,所以极化目标分解理论可用于目标检测或分类。
目前,极化目标分解理论主要分为基于散射矩阵分解的相干目标分解方法和基于协方差矩阵或相干矩阵的部分相干目标分解两类。
本文从目标分解的基本理论出发,对这些分解方法进行了归纳和分析,以便对这些分解方法进行深刻的把握。
为目标分解方法应用于SAR图像分类提供一些参考。
2 极化SAR图像的基本理论2.1 极化合成孔径雷达概述极化合成孔径雷达是合成孔径雷达向多功能方向发展的一个重要内容,它能有效提高获取目标信息的能力,为提高目标分类的精度提供了有力的工具。
传统的单极化合成孔径雷达仅能获得地面场景在某一特定极化收发组合下的目标散射特性,所得到的信息量是有限的。
若想对地物的地理和电磁特性作进一步的分析与研究,需要了解地物目标在不同极化收发组合下的回波特性,即所谓的雷达极化信息。
这种能够获得地物目标极化散射特性的SAR系统称为极化合成孔径雷达系统。
应用极化合成孔径雷达系统进行观测,测量的数据不再只是目标的后向散射系数,而是一个2 2的复散射矩阵。
与传统的单极化合成孔径雷达相比,极化合成孔径雷达的突出优点在于测量数据包含了更丰富的目标信息,这样就为信息挖掘提供了可能,因此它在目标检测、识别、分类以及目标参数反演等方面具有显著的优势。
极化合成孔径雷达通过测量地面每个分辨单元内的散射回波,进而获得其Sinclair矩阵和Mueller矩阵,这些极化散射矩阵可以用来完全描述目标散射回波的幅度和相位特性。
利用极化合成技术,可以由目标回波的Mueller矩阵计算出天线在任意极化收发组合下所接收到的回波功率值。
也就是说,只需获得四种基本极化组合,即HH 、HV 、VH 和VV 极化,就可以准确地计算出天线在所有可能的极化状态下的接收功率值。
总之,极化合成孔径雷达通过调整收发电磁波的极化方式可以获得场景目标的极化散射矩阵,为更加深入地研究目标的散射特性提供了重要的依据,极大地增强了成像雷达对目标信息的获取能力。
2.2极化散射矩阵(Sinclair 矩阵)与Mueller 矩阵在雷达目标电磁散射特性研究中,雷达散射截面(RCS)是最早出现且使用最为广泛的特征量,它能描述目标对电磁波散射效率,表征了目标散射场与入射场之间的幅度变换特性,但RCS 缺乏对于目标回波相位和极化特性的表征能力。
随着雷达研究的进一步深入,更多的学者认识到极化特性对于雷达全面描述目标属性的作用极为重要,因此迫切需要对雷达极化特性具有描述能力的物理量,极化散射矩阵与Mueller 矩阵等能够描述极化效应的量值随之产生。
2.2.1极化散射矩阵通常情况下,雷达目标在远场区的电磁散射是一个线性过程,若选定了散射坐标系及相应的极化基,则雷达入射波和目标散射波的各极化分量之间存在着极化变换关系,因此,目标的变极化效应可用一个复二维矩阵的形式来表示,称为极化散射矩阵(Sinclair 矩阵),它代表了特定姿态和观测频率下目标的全部极化信息。
在后向散射坐标系中,雷达发射、接收的电磁波可以表示为T T h T T v T h E v E E += (2-1)S S h S S v S h E v E E += (2-2)式中T E 表示发射电磁波Jones 矢量,S E 表示接收电磁波Jones 矢量,h 和v 分别为选定的正交极化基。
根据电磁散射的线性性质,发射电磁波T E 与接收电磁波S E 之间的关系可通过一个2⨯2矩阵来表示,此矩阵就称为极化散射矩阵,即:(2-3)或者可表示为:(2-4)式中r 为散射目标与接收天线之间的距离,k 为电磁波的波数,S 表示极化散射矩阵。
一般情况下,散射矩阵S 具有复数形式,它是目标变极化效应的定量描述,与雷达的照射和观测接收方向有关。
在特定的照射和观测方向上,对于给定的工作频率和目标姿态,散射矩阵完全表征了照射一观测方向上目标的相干极化电磁散射特性。
在满足互易性原理并使用后向散射坐标系条件下vh hv S S =,若再忽略绝对相位值,则极化散射矩阵中只有5个独立变量(3个幅度以及2个相位)。
实际上,目标的散射矩阵不但取决于目标本身的形状、尺寸、结构、材料等物理因素,同时也与目标和收/发测量系统之间的相对姿态取向、空间几何位置关系以及雷达工作频率等观测条件有关。
2.2.2 Mueller 矩阵极化散射矩阵给出了入射波Jones 矢量与散射波Jones 矢量之间的关系,由电磁波极化理论可知,Jones 矢量只能用来描述完全极化电磁波,对于广泛存在的不完全极化波和完全非极化波则需要用Stokes 矢量来描述。
对于这种情况,同样需要一个矩阵来建立入射波和散射波之间的联系,该矩阵就是Mueller 矩阵。
为了推导Mueller 矩阵的形式,可以定义波的相干矢量如下:〉⊗〈=•)()(t E t E C (2-5)其中“⊗”表示Kronecher 直积,“*”表示取共轭,“< >”表示求集合平均。
目标入射和散射波的相干矢量分别为:〉⊗〈=•i i i E E C (2-6)〉⊗〈=•s s s E E C (2-7)式中,i E 表示目标入射波,s E 表示目标散射波。
散射与入射电磁Jones 矢量之间的关系为:s E =S i E (2-8)式中i E 既可以是完全极化的,也可以是部分极化的。
极化散射矩阵S 是目标本身所具有的特性,与入射电场i E 无关。
目标散射波的相干矢量为:(2-9)考虑到S 与入射电场不相关,上式可变为:(2-10) 式中中间矩阵W 定义为:(2-11)利用电磁散射理论中相干矢量与Stokes 矢量之间的等价关系,可得到目标入射电场与散射电场Stokes 矢量之间的关系为:i i s s MJ J RWR RC J ===-1 (2-12)式中M 即为目标的Mueller 矩阵,其计算表达式为:M=1-RWR (2-13)其中变换矩阵R 为:(2-14)从Mueller 矩阵的定义式可以看出,M 是由W 经过相似变换得到的,可见M 与W 存在等价关系。
而中间矩阵W 是由目标的极化散射矩阵得到的,与极化散射矩阵相比,丢掉了绝对相位信息。
事实上,还存在一种反映雷达接收功率与收发天线极化之间依赖关系的Stokes 矩阵,它与Mueller 矩阵之间的差异并不大,它们描述了同一个电磁散射过程的两个不同方面。
但两个矩阵所包含关于目标的电磁散射特性信息是完全相同的。
由以上分析可以看出,对于确定性目标,散射矩阵完全表征了目标在特定观测条件下的电磁散射特性,它给出了目标对于入射波与散射波Jones 矢量的极化变化关系;而对于起伏性目标,Mueller 矩阵从统计的角度描述了目标在特定观测条件下的极化散射特性,反映了目标对于入射波和散射波Stokes 矢量的极化变换关系。
从信息量的角度讲,Mueller 矩阵中仅包含关于目标极化散射过程的二阶矩信息,而没有包含一阶及三阶以上更高阶矩的信息,因此可以说Mueller 矩阵所包含的信息对于描述目标电磁散射特性而言是不完全的。
2.3极化协方差矩阵与相干矩阵在极化SAR数据的分析过程中,为了表述方便我们常常需要将目标的极化散射矩阵矢量化,从而得到散射矢量,并进一步得到目标的极化协方差矩阵和相干矩阵。
极化协方差矩阵和相干矩阵中包含了雷达测量得到的全部极化信息,其复元素是我们进行多极化SAR数据分析和处理的基础。
2.3.1 协方差矩阵根据数学法则,散射矩阵S的矢量化可以表示为:(2-15)其中上标T表示矩阵的转置运算,V(S)为矩阵矢量化算子,Trace为求矩阵对角线元素之和的运算符,ψ为一组2⨯2的复矩阵集,它是以Hermitian内积形成的一个正交基集。