双馈风力发电机的数学模型
第四章 双馈电机的数学模型(2R)

第四章 双馈电机的数学模型(两相旋转坐标系)定子绕组接入无穷大电网,定子旋转磁场电角速度为同步角速度1ω,因此,前面我们选用在空间中以恒定同步速1ω旋转的d-q-0坐标系下的变量替代三相静止坐标系下的真实变量来对电机进行分析。
在稳态时,各电磁量的空间矢量相对于坐标轴静止,这些电磁量在d-q-0坐标系下就不再是正弦交流量,而成了直流量。
交流励磁发电机非线性、强耦合的数学模型在d-q-0同步坐标系中变成了常微分方程,电流、磁链等变量也以直流量的形式出现,如图4-1所示:采用前面的正方向规定,即定子取发电机惯例,转子取电动机惯例时,三相对称双馈发电机的电压方程、磁链方程、运动方程和功率方程及其详细推导过程如下:4.1 电压方程4.1.1定子电压方程要实现三相坐标系向同步旋转d-q-0坐标系的变换,可利用坐标变换矩阵r s C 23>-来进行。
重写三相坐标系下的定子电压方程如下:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡C B AC B A s s s C B AD D D i i i r r r u u u ψψψ00000 对上式两边乘以坐标变换矩阵r s C 23>-,有:][02312323232323dq rs rs ABC r s s ABCr s ABC r s s ABC r s Cdtd C i C r D C i C r u C ψψ>-->->->->->-+-=+-=即:dtd dtdCC i r u dq dq rs rs dq s dq 002312300ψψ++-=>-->-图4-1 dq 轴下双馈发电机的物理模型式中:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡+-+----⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+----+-=>-->-0000101021)32sin()32cos(21)32sin()32cos(21sin cos 32*212121)32sin()32sin(sin )32cos()32cos(cos 3223123dt d dt d dtdCC rs rs ϕπϕπϕπϕπϕϕϕπϕπϕϕπϕπϕϕ对于定子绕组:1ωϕ=dtd于是d-q-0坐标系下定子电压方程可表示为(略写零序分量):⎪⎪⎩⎪⎪⎨⎧++-=+--=qs ds qs s qs ds qs ds s ds dt d i r u dt d i r u ψψωψψω11 (4-1)4.1.2转子电压方程同样,要实现转子三相坐标系向同步旋转d-q-0坐标系的变换,可利用坐标变化矩阵r s C 23>-来进行。
基于Matlab的双馈风力发电机的模型研究与仿真
胡绍猫, 陈秉均 ( 华南理工大学, 广东 广州 510640)
Sim ulation Research on the M odel of Doubly fed Wind T urbine Based on M atlab
HU Shao mao, CHEN Bing jun ( South China U niver sity of T echno lo gy , Guangzhou 510640, China)
[ 1] 刘天羽 , 于书芳 , 等 . 无刷 电机在 风力发 电机变 速恒 频 控制中的研究 [ J] . 内 蒙古 电力 技术 , 2002, 20( 4) : 13. [ 2] [ 3] 贺益康 , 郑 康 , 等 . 交流 励磁变 速恒频 风电系 统运 行 研究[ J] . 电力系统自动化 , 2004, 28( 13) : 55- 59, 68. 聂春燕 . 基于 M at lab/ Simulink 异步电动机动态仿真模 型的研究 [ J] . 电工技术杂志 , 2000, ( 8) : 22- 24. 作者简介 : 胡绍猫 ( 1978- ) , 男 , 江西新余人 , 华南理工大 学
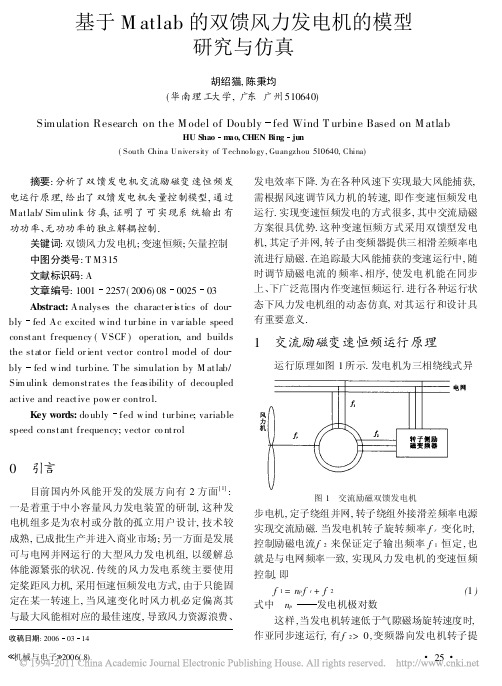
发电效率下降. 为在各种风速下实现最大风能捕获, 需根据风速调节风力机的转速, 即作变速恒频发电 运行. 实现变速恒频发电的方式很多 , 其中交流励磁 方案很具优势. 这种变速恒频方式采用双馈型发电 机 , 其定子并网, 转子由变频器提供三相滑差频率电 流进行励磁 . 在追踪最大风能捕获的变速运行中 , 随 时调节励磁电流的 频率、 相序 , 使发电 机能在同步 上、 下广泛范围内作变速恒频运行. 进行各种运行状 态下风力发电机组的动态仿真, 对其运行和设计具 有重要意义 .
基于Maxwell的双馈风力发电机的建模与仿真
基于Maxwell的双馈风力发电机的建模与仿真吕义;樊姗;段勇强;刘漫;袁海林;廖红华【摘要】为优化双馈风力发电机模型,提出了一种基于Maxwell双馈风力发电机建模与仿真的方案.以1.5MW的双馈风力发电机为例,首先利用Maxwell中RMxprt 模块对电机建立模型,并导入二维界面生成Maxwell 2D模型,然后利用Maxwell 2D进行瞬态有限元分析,通过提取数据分析比较空载和负载两种不同状态下转子磁链特性、三相感应电压的变化情况.仿真结果表明:双馈风力发电机负载和空载运行时转子磁链和三相感应电压成正比关系,且负载时感应电压波动较明显.仿真结果为进一步研究双馈风力发电机提供了理论支持.【期刊名称】《湖北民族学院学报(自然科学版)》【年(卷),期】2019(037)001【总页数】6页(P96-100,120)【关键词】RMxprt;Maxwell;双馈风力发电机;瞬态有限元分析【作者】吕义;樊姗;段勇强;刘漫;袁海林;廖红华【作者单位】湖北民族大学信息工程学院,湖北恩施445000;湖北民族大学信息工程学院,湖北恩施445000;湖北民族大学信息工程学院,湖北恩施445000;湖北民族大学信息工程学院,湖北恩施445000;湖北民族大学信息工程学院,湖北恩施445000;湖北民族大学信息工程学院,湖北恩施445000【正文语种】中文【中图分类】TM315双馈风力发电机具有有功和无功解耦控制、机械应力小、输出电能质量较高等优点,被广泛应用在风力发电机中[1].目前,针对双馈风力发电机的建模与分析往往采用能对其电机内电磁场有效分析的有限元分析软件,如Maxwell软件.Maxwell是一款Ansoft公司研发的具有运算结果精确的软件.它能实现对二维以及三维电磁场有限元分析以及对各状态下磁场的计算.如张俊等[2]运用Maxwell软件建立双馈风力发电的电磁场模型,对空载电机内部磁场分布情况和运行特性进行了分析.梅柏松等[3]运用Maxwell软件建立双馈风力发电机的仿真模型,通过静、瞬态仿真对比分析电机空载时磁场分布情况,并对反电动势进行了谐波分析.尽管国内运用Maxwell软件对双馈风力发电机有许多研究,但在分析比较双馈风力发电机空载和负载的文献相对较少.为此,本文利用Maxwell软件对额定功率为1.5 MW的双馈风力发电机进行建模与仿真分析,通过分析其空载磁力线和磁密的分布、三相开路电动势的变化,以及比较空载和负载下转子的磁链特性和三相感应电压,来分析双馈风力发电机的性能特点和运行状态.1 二维电磁场基本方程在电机磁场分析时求解区域都存在电流源,而电机的磁通量和磁力线分布情况都与磁位矢量有着密切的关系.矢量磁位方程[4]表达如下:式中:υ表示磁阻率,Ω/s;A表示矢量磁位,wb/m;Js表示电流密度矢量,A/m2;σ表示导电率,s/m;v表示运动速度,m/s.又因为:式中:μ为导磁率,F/m.电机的二维磁场沿轴向呈均匀分布,则电流密度矢量Js和矢量磁位A则只存在轴向分量,即:Js=Jsz,A=Asz.则有:由AZ的泊松方程,可得:B=∇A,B表示磁感应强度单位用Tesla来表示.磁感应强度分量为:2 双馈风力发电机数学方程对电机建立三相静止坐标系下的整体数学模型.通过Clark变换[5]成α、β两相静止坐标系方程,则发电机定子电压方程:转子电压方程:磁链方程:式中:Usα、Usβ、Urα、Urβ分别是定子和转子在α、β 轴上分量电压,ω1、ωs分别表示同步角速度和滑差角速度则=-.当以转子磁场控制时,则isα、isβ、ψrα、ψrβ、ωr作为状态变量,则数学方程组为:则有:式中:Rs、Rr分别为定子电阻和转子电阻;P 表示微分算子;ψrα、ψrβ分别表示转子α、β 轴相磁链;isα、isβ分别表示定子α、β轴相电流;Ls、Lr、Lm分别表示定子电感、转子电感、定转子间互感.Rs、Rr分别为定子电阻和转子电阻;Urα、Urβ分别表示变换成α、β轴两相坐标系后转子的输入电压;σ表示电机漏感系数.则转矩的数学表达式:其运动方程为:式中:Te表示电机的电磁转矩;TL表示电机的磁阻转矩;np表示电机负载转矩;p表示交流电机的极对数;ωr表示转子角速度.电机旋转运动方程满足:式中:J表示转子的转动惯量,ω表示角速度,λ表示电机阻尼系数,则Tew表示电磁力矩,Tload表示电机负载力矩.3 双馈风力发电机模型的建立首先根据设计参数和尺寸在RMxprt模块中搭建几何模型,其中双馈风力发电机的铁芯采用热轧硅钢片D23材料,转轴采用不锈钢材料,基座采用铸铁材料.定子采用双层绕组,定子和转子绕组都采用Y型接线方式.然后将几何模型转换至Maxwell 2D模块进行有限元仿真分析.其中双馈风力发电机相关参数和尺寸如表1所示.在RMxprt模块中生成的电机结构模型如图1所示,其中定子和转子的槽型设计尺寸如图2所示.图2 定转子槽型图Fig.2 Groove diagram of stator and rotor表1 双馈风力发电机数据参数Tab.1 Data parameters of doubly-fed wind generator参数项目数值参数项目数值额定功率/kW 1500 转子外径/mm 700额定电压/V 960 转子内径/mm 400频率/Hz 50 铁芯长度/mm 680额定转速/(r·min-1)1500 定/转子槽数 72/60能量转换效率 0.94 定/转子极对数 2/2定子外径/mm 950 铜线绕组 0.09定子内径/mm 720图1 双馈风力发电机结构图Fig.1 Structure diagram of doubly-fed wind generator图1 中双馈风力发电机在RMxprt的基本结构包括定子铁芯、定子槽、转子槽、转子铁芯和转轴.其中定子槽个数为72个,转子槽个数为60个,由于1.5MW双馈风力发电机属于大功率电机,为使电机稳定运行,定子槽的槽型选用开口型,转子槽则选用半开口槽.图2中①为定子槽,其中Hs0为8mm,Hs1为4mm,Hs2为70mm,Bs1为26mm,Bs2为20mm;②为转子槽,其中Hs0为4mm,Hs1为2mm,Hs2为70mm,Bs0为14mm,Bs1为26mm,Bs2为23mm.然后将RMxprt模块的几何结构模型导入Maxwell 2D模块生成的双馈风力发电机模型,双馈风力发电机几何局部模型如图3所示.图3为双馈风力发电机模型四分之一局部图,其中双馈风力发电机结构主要部位包括:定子铁芯、定子绕组、鼠笼导条、转子铁芯以及转轴.4 双馈风力发电机空载仿真分析4.1 双馈风力发电机空载有限元分析在Maxwell 2D模块上设置运行停止时刻为0.005 ms,电机空载转速为1485r/min.在场覆盖分别求解磁通密度和磁力线分布图[6].发电机空载磁通密度云网状线分布如图4所示,双馈风力发电机内部磁力线分布如图5所示.图4中双馈风力发电机内部的磁力线是一个闭环曲线,转子的槽与槽之间磁力线较密集,定子铁芯外围的磁力弧线呈平行弧线.图5中电机运行时定子铁芯和介于定子槽与转子槽的部位磁通密度较大,则该部位的磁场强.由此可知,在双馈风力发电机中磁力线越密集,磁通密度越大.图3 双馈风力发电机几何局部模型Fig.3 The geometry local model of doubly-fed wind generator图4 双馈风力发电机空载磁力线分布图Fig.4 Distribution diagram of no-load magnetic flux line for doubly-fedwind generator图5 双馈风力发电机空载磁通密度云网状线分布图Fig.5 Distribution diagramof no-load flux density cloud network for doubly-fed induction generator 4.2 双馈风力发电机的空载特性提取空载运行时转矩数据并绘制空载运行时双馈风力发电机的转矩特性图[7-8],双馈风力发电机在空载运行时电机的转矩特性如图6所示.在图6中,当双馈风力发电机运行到5ms时转矩达到233.2kN·m,而在15ms时转矩大小达到了207.3 kN·m,由于双馈风力发电机在旋转过程中绕组磁链将增大,将产生电动磁阻转矩T1,而在绕组磁链减小时,将产生阻力磁阻转矩T2.在图6中,转矩波形的最大幅值随着发电机的运行在减弱,这是因为双馈风力发电机在旋转过程中其转矩与磁场强度以及电流都存在相互关系,随着双馈风力发电机运行过程中由于磁链能量衰减最大转矩也在减弱.当设定双馈风力发电机的转速为1500r/min即为同步转速,此时双馈风力发电机为同步运行状态[9-10].提取双馈风力发电机同步运行时A、B、C三相电势数据并绘制波形.双馈风力发电机同步运行时定子A、B、C三相电势开路波形如图7所示. 图6 空载运行时电机的转矩特性Fig.6 The torque characteristics of motor under no-load operation图7 同步运行时A、B、C三相电势开路波形图Fig.7 Three phase potential open circuit waveform of A,B and C in synchronous operation在图7中,定子三相电势波形对称且最大幅值达到563.3V,三相电势的相位依次相差120°,这是由于双馈风力发电机定子绕组是Y型连接,且双馈风力发电机同步运行时转子绕组的磁链对定子的磁链影响较小,故而定子三相电势呈稳定的对称分布,三相电势的相位相差120°.同样,提取转子磁链特性和三相感应电压数据并绘制波形,双馈风力发电机空载运行时,转子绕组的磁链特性如图8所示,三相感应电压如图9所示.图8 空载运行时双馈风力发电机转子绕组的磁链特性Fig.8 Flux linkage characteristics of doubly fed wind generator rotor windings during no-load operation图9 空载运行时双馈风力发电机转子的感应电压Fig.9 Induction voltage of doubly fed wind generator rotor during no-load operation在图8中,双馈风力发电机空载时转子绕组磁链的最大幅值达到192.2 wb;在图9中,空载时转子的感应电压最大幅值达到29.6kV.图8和图9中转子的三相磁链和三相感应电压按数标相互对应,由双馈风力发电机空载时转子绕组的磁链所对应的感应电压可知:空载时转子绕组的磁链和感应电压成正比关系.5 双馈风力电机的负载特性在空载模型设置基础上,增加机械负载扭矩10 kN·m,则双馈风力发电机运行过程为负载运行.提取负载运行时转子绕组的磁链特性以及感应电压数据并绘制波形图,双馈风力发电机在负载时转子绕组的磁链特性如图10所示,三相感应电压如图11所示.图10 负载运行时双馈风力发电机转子绕组的磁链特性Fig.10 Flux linkage characteristics of doubly fed wind generator rotor windings during load operation图11 负载运行时双馈风力发电机转子的感应电压 Fig.11 Induction voltage of doubly fed wind generator rotor during load operation在图10中,双馈风力发电机在负载时转子绕组的磁链最大幅值达到147.2 wb,相对于空载时转子绕组磁链的最大幅值192.2wb而言,是由于双馈风力发电机在负载时产生电枢反应磁场,反应磁场和气隙中原有的磁感耦合阻止了磁通量的变化.结合图8和图10可知空载时转子磁链增大区域在负载电枢反应后变小,而空载时减小的区域在负载时反而变大.在图11中,双馈风力发电机负载时转子感应电压的幅值达到22.5 kV,相对于空载时转子的感应电压最大幅值29.6kV而言,是由于负载时电驱反应对双馈风力发电机起减磁作用导致转子感应电压较空载时低.双馈风力发电机在负载运行时磁场变化更复杂所导致转子电动势峰值的波动较空载运行时大,双馈风力发电机在负载运行时转子的磁链和感应电压成正比关系.6 结论基于Maxwell对额定功率为1.5MW的双馈风力发电机建模并进行了仿真.通过在RMxprt设置参数生成基本结构并转换成Maxwell 2D模型.求解了空载时双馈风力发电机的磁通密度和磁力线分布图,对电机的空载、同步以及负载运行情况进行了仿真,绘制了电机同步运行时定子三相电势开路波形图,以及空载和负载运行时转子的磁链特性和三相感应电压波形图,并分别对比分析了转子磁链和三相感应电压在两种运行情况下的特性.参考文献:【相关文献】[1] 李金遥,杨梦娇,张昌兵,等.基于Maxwell2D的水轮发电机建模与仿真[J].东北水利水电,2017,6(18):43-46.[2] 张俊,尹曾峰,陈雷,等.基于有限元法的兆瓦级双馈风力发电机电磁分析[J].大电机技术,2013(1):22-24.[3] 梅柏松,刘海华,张金萍.兆瓦级双馈风力发电机磁场有限元分析[J].微电机,2010,10(43):26-29.[4] 刘华,王维俊,王彭伟,等.基于Ansoft的直驱DSPM发电机设计与仿真[J].微电机,2013,46(2):13-16.[5] 高仕红.双馈风力发电机组动态性能改善的控制策略[J].湖北民族学院学报(自然科学版),2014,32(4):452-456.[6] 尹青华,刘明基,张健.永磁电机电磁场及应力场的时步有限元计算研究[J].电机与控制应用,2015,42(2):37-41.[7] LI R,WALLACE A,SPEE R,et al.Two-axismodel development of cage-rotor brushless doubly-fedmotors[J].IEEE Transaction on Energy Conversion,2001,6(3):453-460.[8] 杨凯辰,杨文焕,王峰,等.RMxprt在三相异步电动机中的2D电磁分析[J].电子科技,2015,28(10):158-161.[9] FAN Y,CHAU K T,CHENG M.A new three phase doubly salient permanent magnet machine for wind power generation[J].IEEE Transaction on Industry Applications,2006,42(1):53-59.[10] 魏云冰,刘天,史觉玮,等.基于ANSOFT双馈异步风力发电机定子匝间短路故障性能分析[J].电测与仪表,2014,51(13):60-65.。
3.3双馈电机的动态数学模型-Read
双馈电机变速恒频发电原理双馈异步发电机的变速运行是通过励磁变流器在电机转子绕组中施加三相低频交流电实现的。
调节励磁电流的频率,可以确保定子侧输出频率保持恒定;采用矢量控制技术,调节励磁电流的幅值和相位,可以确保定子侧有功功率及无功功率的控制互不干扰;通过对风力机转速的控制,可以实现最大功率点跟踪,尽量多地吸收风能;而调节无功功率可以控制向电网输出的功率因数,也可提高风电机组及电网系统的动、静态运行稳定性[14]。
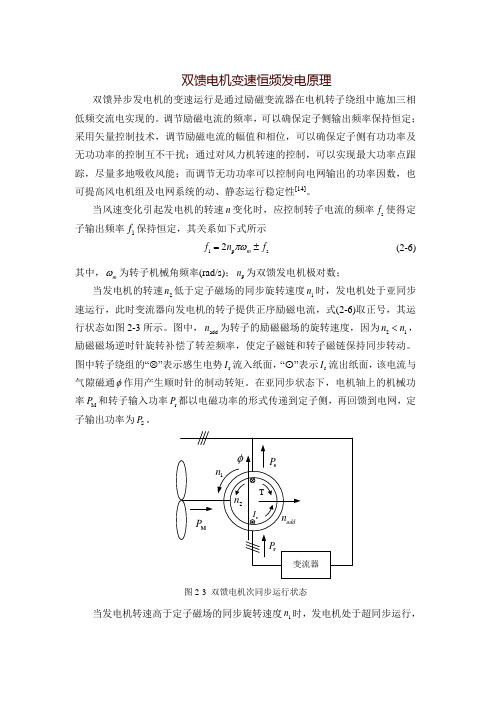
当风速变化引起发电机的转速n 变化时,应控制转子电流的频率s f 使得定子输出频率1f 保持恒定,其关系如下式所示1p s 2m f n f πω=± (2-6)其中,m ω为转子机械角频率(rad/s);p n 为双馈发电机极对数;当发电机的转速2n 低于定子磁场的同步旋转速度1n 时,发电机处于亚同步速运行,此时变流器向发电机的转子提供正序励磁电流,式(2-6)取正号,其运行状态如图2-3所示。
图中,add n 为转子的励磁磁场的旋转速度,因为21n n <,励磁磁场逆时针旋转补偿了转差频率,使定子磁链和转子磁链保持同步转动。
图中转子绕组的“✞”表示感生电势r I 流入纸面,“⓪”表示r I 流出纸面,该电流与气隙磁通φ作用产生顺时针的制动转矩。
在亚同步状态下,电机轴上的机械功率M P 和转子输入功率r P 都以电磁功率的形式传递到定子侧,再回馈到电网,定子输出功率为S P 。
图2-3 双馈电机次同步运行状态当发电机转速高于定子磁场的同步旋转速度1n 时,发电机处于超同步运行,式(2-6)取负号;其运行状态如图2-4所示。
此时由于21n n >,变流器需向发电机的转子提供反序励磁电流,使励磁磁场顺时针旋转,降低转子磁链转速,仍然保持定子磁链和转子磁链同步转动。
超同步状态下的气隙磁通φ与转子电流的方向仍与次同步时保持一致,因此也产生顺时针的制动转矩。
但在此状态运行时,由风力机输入电机的机械功率M P ,一部分转化为转差功率r P 通过变频器回馈到电网,另一部分转化为电磁功率,有定子回馈到电网上,定子输出功率为S P 。
基于Matlab_Simulink的双馈感应风力发电机组建模和仿真研究
要控制机组的转速来实现最大风能捕获,可以
检测当前的风速并计算出最佳转速后进行转速控
制,这实际上是一种直接转速控制的方法,控制目标
明确,原理简单。但现场中风速的准确检测比较困
难,实现起来存在很多问题,风速检测的误差会降低
最大风能捕获的效果[14-15]。在实际应用中,可以通过
控制策略和控制方法的改进来避免风速的检测。这
2
2
P = 2
2 2
2
2
3 2
(ud2id2+uq2iq2)
2
2
2
P = 2
2 2
2
2
3 2
(uq2id2-ud2iq2)
(10)
清洁能源 Cle a n Ene rgy
第 26 卷 第 11 期
电网与清洁能源
97
式中,P1、Q1为定子侧向电网输出有功无功;P2、Q2为 转子侧从电网输入有功无功。
图2 风能利用系数-叶尖速比
从轮毂到发电机转子之间的机械传动部分在硬
度和阻尼系数被忽略时,可用一质量块的实用模型
来描述[6-7],如式(4)所示。
Tgen-T'wtr=Jd
dΩgen dt
(4)
式中,Jd为等效转动惯量;T'wtr为等效风轮转矩;Tgen为 转子转矩;Ωgen为转子机械角速度。 1.2 双馈感应发电机数学模型
系:
u2 2
2 d1 2
22 2
u2 2
2 q1 2 22
= 2 2 u2 d2 2
22
u22 22
2 q2 2
-R1-L1P -ω1L1 -LmP -ωsLm
ω1L1 -R1-L1P
ωsLm -LmP
双馈风力发电机功率控制

irq
=
2LsTeref −3Lmϕs
双馈电机电磁转矩开环控制框图为:
T ref e
2Ls
i ref
rq
−3Lmϕs
2.4 定子无功控制
ird
=
ϕs Lm
−
2Qsref Ls 3Us Lm
=
ims
−
2Qsref Ls 3Us Lm
双馈电机定子无功功率开环控制框图为:
Q ref s
2Ls
3LmU s
Ur = Urd + jUrq = Rr Ir + jsωs Lr Ir + jsωs LmIs
( ) = Rr Ir + jsωs ( Lr − Lm ) Ir + jsωs Lm Is + Ir
( ) Ur
s
=
Rr Ir s
+
jωs ( Lr
− Lm ) Ir
+
jωs Lm
=
2
3 2
mqudc
1.3 直流母线模型
1 2 Cdc
pud2c
=
Pg
−
Pr
1.4 双馈风力发电机稳态模型等效电路
双馈发电机
Rs
Lσ s
Lσ r
Rr
U r
+
s
s-
~
U n
Is U s
Lm
Im
Ir
Rg
Lg
Ig
Pg
DC
Pr
AC
U g
AC
DC Udc Cdc
U r
网侧滤波器
直流母线
网侧变流器
= =
−3Lmϕsirq 2Ls
无刷双馈发电机风力发电系统的建模与控制

无刷双馈发电机风力发电系统的建模与控制52 收稿日期:2009-01-09改稿日期:2009-02-10无刷双馈发电机风力发电系统的建模与控制刘广忱,王生铁,刘瑞明,张润和(内蒙古工业大学,内蒙古呼和浩特010051)摘 要:从转子参考坐标系dq 模型出发,研究功率绕组和控制绕组双同步M T 坐标系下的无刷双馈发电机(BD 2FG )数学模型,建立了包括BDFG 、风力机及机械传动链的风力发电系统数学模型。
根据风力机和BDFG 的特性,采用定子功率绕组磁链定向的矢量变换控制技术,给出了一种功率控制策略。
该策略通过控制发电机控制绕组的交流励磁,实现BDFG 风力发电系统有功、无功功率的解耦控制和最大功率追踪控制(MPPT )。
仿真结果验证了所提出建模与控制方案的正确性和有效性。
关键词:风力发电;无刷双馈电机;最大功率追踪;矢量控制中图分类号:T M 315 文献标识码:A 文章编号:1004-7018(2009)09-0052-05M odeli n g and Con trol of W i n d Power Genera ti on Syste m w ith Brushless D oubly -Fed Genera torL IU Guang -chen,WAN G Sheng -tie,L IU R ui -m ing,ZHAN G R un -he(I nnerMongolia University of Technol ogy,Hohhot 010051,China )Abstract:The mathe matical model of brushless doubly -fed generat or (BDFG )in both power winding and contr ol winding synchr onous reference fra mes M T was derived fr om the model in r ot or reference fra me dq ,and the model of BDFG -based wind power syste m which consists of BDFG,wind turbine and mechanical drive train was established in this paper .Based on the characteristic analysis of wind turbine and BDFG,a power contr ol strategy for BDFG -based wind power sys 2te m was devel oped by means of stat or power winding flux orientati on contr ol technol ogy,which was able t o achieve the de 2coup ling regulati on of the active and reactive power and the MPPT contr ol by contr olling the contr ol winding AC excitati on .The si m ulati on results verify the correctness and validity of the modeling and contr ol sche me p r oposed in the paper .Key words:wind power generati on;brushless doubly -fed generat or (BDFG );maxi m u m power point tracking (MPPT );vect or contr ol0引 言并网型风力发电系统中,要求风电的频率与电网频率保持一致,即频率保持恒定。
双馈电机数学建模资料

(1)当Cp取固定值时,风机输出的机械功率与风速的三次方成正比 (2)Cp是β 和λ 的函数,额定风速以下β 近似为0, Cp只是λ的函数
Cp
C p max
opt
R / v
β为定值时的风机风能转换系数
双馈式风力发电系统概述
风力机的气动特性 (1)对同一转速而言,风机捕获功率随风速增大而增大; (2)对同一风速而言,仅有一个转速点使风机捕获最大功率; (3)浆距角增加时, Cp迅速下降。此特性用于高风速下控制风机转速
电网
齿轮箱
AC/DC
DC/AC
机侧变流器 网侧变流器
风力机
双馈发电机
(4)双PWM变流器由两个用直流联结的背 靠背电压源逆变器(VSC)组成,分别为机 侧变流器和网侧变流器 (5)机侧变流器的基本功能是为双馈发电机 提供励磁电压,并且在矢量控制策略下实现 有功和无功的解耦调节 (6)网侧变流器的主要功能是在直流调 节系统的控制下维持电容电压恒定,同时 具有调节功率因数的功能。
双馈式风力发电系统概述
2.2 最大风能追踪(MPPT)
原理描述:
双馈式风力发电系统概述
2.3 风力机仿真模型
PT
1 AC p (, )v 3 2
风速
v
立方运算
v3
乘 法 运 算
A / 2
Cp
PT
C p max
除法
Cp
R
乘R 风机转速
除法
机械转矩
opt
双馈电机动态数学模型和坐标变换
is iA iB iC
Ψr a b c T i r ia ib ic
T
Ψs A B C
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
B
LBA
LBB
LBC
LBa
LBb
LBc
i
B
C a
LCA LaA
LCB LaB
LCC LaC
LCa Laa
LCb Lab
LCc Lac
iC ia
(3-8)
b
LbA
LbB
LbC
Lba
Lbb
Lbc
ib
c LcA LcB LcC Lca Lcb Lcc ic
uA rsiA D A
uB rsiB D B
uC rsiC D C
转子电压方程为:
ua rria D a ub rrib D b
uc rric D c
可用矩阵表示为:
uA rs 0 0 0 0 0 iA D A
u
B
0
rs
0
0
0
0
iB
D
B
uC ua
1
Lab
Lbc
Lca
Lba
Lcb
Lac
2
Lmr
至于第二类定、转子间的互感,当忽略气 隙磁场的高次谐波,则可近似为是定、转
子绕组轴线电角度 r 的余弦函数。当两套
绕组恰好在同一轴线上时,互感有最大值 L(sr 互感系数),于是:
LAa LaA LBb LbB LCc LcC Lsr cos r
绕组匝数相等,且各绕组间互感磁通都通过气隙,
磁阻相等,故可认为:Lms Lmr 。
定子各相自感为: LAA
LBB
LCC
Lls Lms
转子各相自感为:Laa Lbb Lcc Llr Lmr
两相绕组之间只有互感。互感可分为两类:
1.定子三相彼此之间和转子三相彼此之间 的位置是固定的,故互感为常值
abc a b c T
iABC iA iB iC T
iabc ia ib ic T
Lms
Lls
Lss
1 2
Lms
1 2
Lms
1 2
Lms
Lms Lls
1 2
Lms
1
2 1
2Байду номын сангаас
Lms Lms
Lms
Lls
Lmr Llr
Lrr
1 2 Lmr
1 2
Lmr
1 2
Lmr
Lmr Llr
1 2 Lmr
1 2
Lmr
1 2 Lmr
Lmr
Llr
c os r
Lrs
Lrs T
Lsr
c
os
r
2
3
c
os
r
2
3
c
os
r
2
3
c os r
c
os
r
2
3
c
os
r
2
3
c
os
r
2
3
c os r
Lrs 和 Lsr两个分块矩阵互为转置,且与转角位
置
有关,他们的元素是变参数,这是系统
双馈风力发电机的 数学模型
双馈风力发电机的数学模型与三相绕线式 感应电机相似,是一个高阶、非线性、强 耦合的多变量系统。为了建立数学模型, 一般作如下假设:
1.三相绕组对称,忽略空间谐波,磁势沿 气隙圆周按正弦分布
2.忽略磁路饱和,各绕组的自感和互感都 是线性的
3.忽略铁损
4.不考虑频率和温度变化对绕组的影响。
或写成:ψ L i
式中的电感是个6*6的矩阵,主对角线元素是与下 标对应的绕组的自感,其他元素是与下标对应的两 绕组间的互感。
由于各相绕组的对称性,可认定定子各相漏感
相等,转子各相漏感也相等,定义定子绕组每相漏
感为 Lls ,定子每相主电感为 Lms,转子绕组每相漏感 为 Llr,转子每相主电感为 Lmr ,由于折算后定、转子
LAb
LbA
LCa
LaC
LBc
LcB
Lsr
cos
r
2
3
LAc
LcA
LBa
LaB
LCb
LbC
Lsr
cos
r
2
3
代入磁链方程,就可以得到更进一步的磁 链方程。这里为方便起见,将他写成分块 矩阵的形式:
其中:
ABC abc
Lss Lrs
Lsr iABC
Lrr
iabc
ABC A B C T
r
非线性的一个根源。
需要注意的是:
1.定子侧的磁链正方向与电流正方向关系是正 值电流产生负值磁链,不同于一般的电动机惯 例,所以式3-8中出现了负号“-”;
2.转子绕组经过匝数比变换折算到定子侧后, 定、转子绕组匝数相等,且各绕组间互感磁通 都通过气隙,磁阻相同,故可以认为转子绕组 主电感、定子绕组主电感与定转子绕组间互感 系数都相等。即 Lms Lmr Lsr
2.定子任一相和转子任一相之间的位置是
变化的,互感是 r 的函数
先看其中的第一类互感,由于三相绕组的 轴线在空间的相位差是120,o 在假设气隙磁 通为正弦分布的条件下,忽略气隙磁场的 高次谐波,互感为:
Lms
cos(120o
)
1 2
Lms
于是:
LAB
LBC
LCA
LBA
LCB
LAC
1 2
Lms
A、 B、 C、 a、 b、 c ——各组绕组的全磁链;
rs、rr
——定子和转子的绕组电阻
D
——微分算子 d dt
磁链方程
定转子各绕组的合成磁链是由各绕组自感磁链 与其它绕组互感磁链组成,按照上面的磁链正 方向,磁链方程式为:
A LAA LAB LAC LAa LAb LAc iA
各轴线正方向取为对应绕组 磁链的正方向。定子电压、电 流正方向按照发电机惯例标示, 正值电流产生负值磁链;转子 电压、电流正方向按照电动机 惯例标示,正值电流产生正值 磁链。
(2)为了简单起见,在下面的分析过程 中,我们假设转子各绕组各个参数已经折 算到定子侧,折算后定、转子每相绕组匝 数相等。
0 0
0 rs 0 0 0 rr
0 0
0 0
iC ia
D D
C a
ub
0
0
0
0
rr
0
ib
D
b
uc 0 0 0 0 0 rr ic D c
或写成: u Ri Dψ
式中:
u A、uB、uC、ua、ub、uc ——定子和转子相电压的瞬时值;
iA、iB、iC、ia、ib、ic ——定子和转子相电流的瞬时值;
于是,实际电机就被等效为图(3-9)所 示的物理模型了。双馈电机的数学模型包 括电压方程、磁链方程、运动方程、电磁 转矩方程等。
电压方程
选取下标s表示定子侧参数,下标r表示转子
侧参数。定子各相绕组的电阻均取值为
转子各相绕组的电阻均取值为 rr 。
rs
,
于是,交流励磁发电机定子绕组电压方程
为:
在建立基本方程之前,有几点必须说明: (1)首先要选定好磁链、电流和电压的正方向。
图3- 9所示为双馈电机的物理模型和结构示意图。图中,定 子三相绕组轴 线A、B、C在空间上是固定, a、b、c为转子轴线并且随转
子旋转, r为转子a轴和定子A
轴之间的电角度。它与转子 的机械角位移 m的关系为
m r / n p ,n p 为极对数。