基于UG的凸轮机构运动分析仿真
基于UG的经编机共轭凸轮机构运动仿真研究

文章 编 号 1 0 2 — 4 6 74 58 0
A R s ac f o jg t a c a i o o t nSmu t nb s do G e e rho n aeC m Me h n m L c moi i l i a e nU C u s o ao
基 于 U 的经 编 机 共 轭 凸轮 机 构 G 运 动 仿 真 研 究
魏 法 明 年 四 甜
( 苏信 息 职 业技 术 学 院 无锡 江 24 5 ) 1 13
摘 要 文章介绍利用 U G软件来实现 凸轮机构运动仿真的方法和步骤 , 通过动 画来表现机构 的运动过程 , 图表 和电子表格来反 用 映运动仿真的结果 , 得到精确 的机构运动数据 , 以此检验机构 的运动结果是否 与设计相一致 , 以保证设计 的准确性 。
连杆是 U G运动仿 真模块 中最基础 的部分 ,需要创建的连
杆 是 指 机构 中所 有 的 运 动零 件 , 因为 所 有 的运 动 零 件 必 须 和 连
二、U 运动分析介绍 G
1UG 运 动 分析 概 述 、
杆相连 , 以至少有一个连杆不能有位移 。 所 对于机架部分可 以不
创建连杆 , 如果创建其为连杆则必须为固定连杆 。 ②创建运动副 运动副就是将机构中的连杆连接在一起 , 使连杆一起运 动 ,
件的运动仿真模块对经编机共轭凸轮机构进行运动学方面的分 可 由下 面三 步 产 生 一个 运动 分 析 方 案 : ①创建连杆 析, 以此来分析整个设计过程的合理性 , 以及所得到凸轮机构的
精确性。主要包括 凸轮机构输出端的位移 、 速度 、 加速度方面的
基于UG的弧面分度凸轮机构的参数化设计及仿真分析的开题报告

基于UG的弧面分度凸轮机构的参数化设计及仿真分析的开题报告摘要:本文以UG为工具,研究了基于UG的弧面分度凸轮机构的参数化设计及仿真分析。
首先介绍了凸轮机构的基本概念和分类,然后详细介绍了弧面分度凸轮的原理和特点,分析了其优点和应用范围。
接着介绍了UG软件的基本功能和特点,详细讲解了UG的二次开发与参数化建模技术。
在此基础上,结合弧面分度凸轮的特点和应用需求,对其进行了参数化建模,并使用UG的仿真分析功能对其进行了运动学分析和强度分析。
最后,通过仿真分析结果的对比和验证,证明了该参数化模型的准确性和可靠性。
本文的研究成果对凸轮机构的优化设计和自动化制造具有一定的参考意义和实际应用价值。
关键词:弧面分度凸轮;UG;参数化建模;仿真分析Abstract:This paper studies the parametric design and simulation analysis of the roller cam mechanism based on UG. Firstly, the basic concept and classification of the cam mechanism are introduced. Then, the principle and characteristics of the arc surface indexing cam are described in detail, and its advantages and application scope are analyzed. Next, the basic functions and characteristics of UG software are introduced, and the secondary development and parametric modeling technology of UGare explained in detail.On this basis, the arc surface indexing cam is modeled parameterized, and UG's simulation analysis function is used to perform kinematic analysis and strength analysis. Finally, through the comparison and verification of the simulation analysis results, the accuracy and reliability of the parameterized model are proved.The research results of this paper have certain reference significance and practical application value for the optimization design and automatic manufacturing of cam mechanism.Keywords: arc surface indexing cam; UG; parametric modeling; simulation analysis。
基于UG的盘形凸轮参数化建模技术研究与实现

影线长短觉得因素有哪些_影线长短代表什么意思影线长短觉得因素有哪些_影线长短代表什么意思股票k线最上方的一条细线就被称之为上影线,中间的一条粗线是其实体。
那么股票影线长短是什么意思呢?下面是整理的影线长短觉得因素有哪些,希望能够帮助到大家。
影线长短觉得因素有哪些下影线可以视作为对股价的推力,上影响则可以代表对于股价的压力。
在K线中,影线向一个方向拉得越长,代表阴力越大,股价将按反方向波动的概率越大。
实体的阴阳和长短、上下影线的长短都反映了市场上多空力量的对比,蕴含着推动市场变动的力量,可以从中判断股价变动的趋势。
影线代表转折的信号,向着一个方向的影线越长,越不利于汇价往这个方向的变动。
简单来说,上影线越长越不利于股价的上涨,下影线越长越不利于汇价的下跌。
影线主要有上影线和下影线。
其中,上影线的长短是由最高价与开盘价的关系决定的,下影线的长短是由最低价与收盘价的关系决定的。
影线是由于多空双方角逐之后,在K线上方或下方产生的一根实线,通常是波动转折的信号。
下影线可以视作为对股价的推力,上影响则可以代表对于股价的压力。
在K线中,影线向一个方向拉得越长,代表阴力越大,股价将按反方向波动的概率越大。
实体的阴阳和长短、上下影线的长短都反映了市场上多空力量的对比,蕴含着推动市场变动的力量,可以从中判断股价变动的趋势。
影线代表转折的信号,向着一个方向的影线越长,越不利于汇价往这个方向的变动。
简单来说,上影线越长越不利于股价的上涨,下影线越长越不利于汇价的下跌。
影线长短代表什么意思股票的影线分为上影线和下影线。
对于阳线,上影线代表的实际上收盘价与最高价之间的差距,下影线则代表的是开盘价与最低价的差距;对于阴线,上影线代表的是开盘价与最高价之间的差距,下影线则代表的是收盘价与最低价的差距。
下影线可以视作为对股价的推力,上影响则可以代表对于股价的压力。
不过单一一根影响要放在具体的K线排列中才能更有意义,例如双针探底和双针探底就是两种典型的形态:【1】双针探底:是指两根有一定间隔的K线,都带有较长的下影线,是K 线图较为常见底部反转形态图表之一。
基于UG的运动仿真及高级仿真
《基于UG的运动仿真及高级仿真》项目一:机构运动仿真项目要求:熟悉UG机构运动仿真模块的内容,掌握运动仿真的一般流程和方法,并根据分析输出结果对机构进行优化。
任务一:熟悉掌握运动仿真基础知识运动分析模块(Scenario for motion)是UG/CAE模块中的主要部分,用于建立运动机构模型,分析其运动规律。
通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion 的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion模块可以进行机构的干涉分析,跟踪零件的运动轨迹,分析机构中零件的速度、加速度、作用力、反作用力和力矩等。
运动分析模块的分析结果可以指导修改零件的结构设计(加长或缩短构件的力臂长度、修改凸轮型线,调整齿轮比等)或调整零件的材料(减轻或加重或增加硬度等)。
设计的更改可以反映在装配主模型的复制品分析方案中,再重新分析,一旦确定优化的设计方案,设计更改就可反映在装配主模型中。
一、运动方案创建步骤1.创建连杆(Links);2.创建两个连杆间的运动副(Joints)3.定义运动驱动(Motion Driver)◆无运动驱动(none):构件只受重力作用◆运动函数:用数学函数定义运动方式◆恒定驱动:恒定的速度和加速度◆简谐运动驱动:振幅、频率和相位角◆关节运动驱动:步长和步数二、创建连杆创建连杆对话框将显示连杆默认的名字,格式为L001、L002 (00)质量属性选项:质量特性可以用来计算结构中的反作用力。
当结构中的连杆没有质量特性时,不能进行动力学分析和反作用力的静力学分析。
根据连杆中的实体,可以按默认设置自动计算质量特性,在大多数情况下,这些默认计算值可以生成精确的运动分析结果。
但在某些特殊情况下,用户必须人工输入这些质量特性。
固定连杆:人工输入质量属性,需要指定质量、惯性矩、初始移动速度和初始转动速度。
UG机械设计实例教程 第3章 凸轮机构的建模与运动仿真

推程曲线
远休止曲线
回程曲线
任务实施
1.零件造型—从动件建模
任务实施
1.零件造型—机架建模
任务实施
2.装配—凸轮机构的装配
1
2
4
3 5
任务实施
3.运动仿真-基本流程
01
确定运动构件
02
确定两构件的运动副类型
03
确定原动件,即驱动运动副
04
确定驱动参数,求解
任务实施
3.运动仿真-操作过程
1 添加连杆
2 添加运动副
3 设置机架
4 添加驱动
5 仿真计算 7 运动播放与追踪
6 仿真结果分析
第三章 凸轮机构的建模与运动仿真
技能目标
01
掌握解析法绘制凸轮轮廓曲线
02
了解凸轮轮廓曲线设计编程
03
掌握 UG 表达式参数化建模方法
04
掌握凸轮机构运动仿真的基本操作
任务引入
凸轮是一个具有轮廓曲线或凹槽的构件, 凸轮转动会带动从动件实现预期的运动规律。
1-凸轮 2-滚子 3-从动件 4-机架
设计如图所示的滚子直动从动件盘形凸轮机构。 已知凸轮 1 匀速转动, 带动滚子 2 和从动件 3 运动, 输出运动为从动件的直线往复运动。 要求将凸轮机构建模并模拟仿真其运动规律。
基于UG软件的串联式凸轮连杆机构的设计方法与运动分析
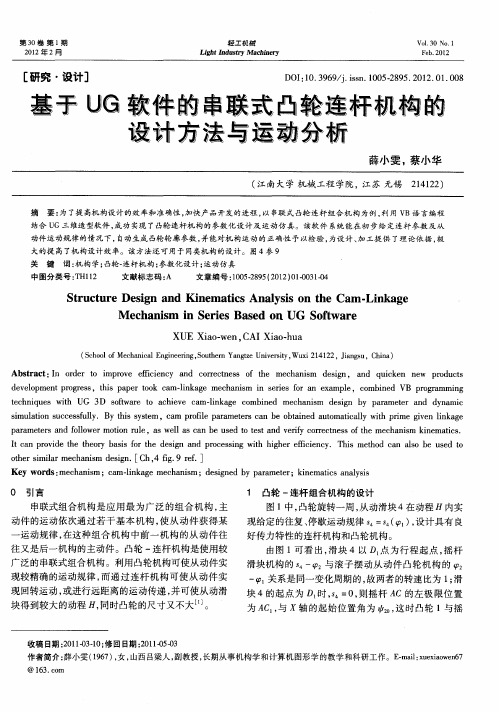
0 引言
1 凸轮 一连 杆组 合机构 的设 计
串联式组合机构是应用最为广泛 的组合 机构 , 主 动 件 的运动 依次 通过 若 干 基本 机 构 , 从 动 件 获 得某 使
一
图 1中 , 凸轮旋 转一 周 , 动滑 块 4在动 程 内实 从 现给定 的往 复 、 歇运 动规 律 s s( ) 设计 具有 良 停 = , 好传力 特性 的连 杆机 构和 凸轮机 构 。
Ab t a t n r e t i r v e c e c a d o r cn s o t e s r c :I o d r o mp o e f in y n c re t e s f h me h n s i c a im d sg e in, a d u c e n w p o u t n q i k n e rd cs d v l p n r g e s,t i a e o k a l ka e me h n s i e i s fr a x mp e,c mb n d VB r g a e eo me tp o r s hs p p r t o c m—i g c a im n s re o n e a l n o i e p o r l I
— — I
z
S 一 关系通过上述运算后可变换成 : 关 系, 一 而 摇杆 实际摆 角为 =( 加一 ) 因此 容 易 得 到 :一 : , l 关系 ;
2 )由试取 的 A B杆 长 度 , 定 了 凸轮 的 基 圆半 径 决
r( B ̄A O B)
变化 ( 即改变 S 大小 ) 可求得一 系列 值 , , 这样 求 得 了 一 的关 系 , 凸轮 机构设 计创 造 了条件 。 s 为
D2
, ∞
案例3 基于UG机械动力学分析-运动仿真
2018/11/7
1.1
打开运动仿真主界面
菜单命令:
【开始】→【运动仿真】
2018/11/7
环境设置
运动学分析:分析仿真机构的运动并 决定机构在约束状态下的位移、速度 、加速度的值的范围
运动学求解需注意以下几点:
软件根据求解时输入的时间与步长的值对模型做动画仿真
外部的载荷与内部的力影响反作用力但不影响运动 连杆和运动付假定都是刚性的 自由度为0 注意:运动学分析时,对有自由度或有初始力的机构结算器不进行求解 ,这类机构需要做动力学分析
2018/11/7
1)旋转副 (Revolute)
可以实现两个相连件绕同一轴作相对的转动
2)滑动副(Slider)
滑块连接是两个相连件互相接触并保持着相对的滑动
3)圆柱副(Cylindrical)
实现了一个部件绕另一个部件(或机架)的相对转动
4)螺纹副(Screw)
实现了一个部件绕另一个部件(或机架)作相对的螺旋运动
副(Joint)相联接,组成运动机构。
2018/11/7
2.1
连杆特性的建立
点击运动仿真工具栏区的连杆特性和
运动副模块中的图标 (Link),系
统将会打开【连杆特性创建】对话框
。 同一对象不能属于两个连杆
2018/11/7
2.2
连杆特性参数的编辑
对各项参数 的编辑与连 杆建立时的 参数设置操
作完全相同
2018/11/7
环境设置
动态分析:如果模型有一个或多个自 由度,必须做动力学分析,在动力学 仿真中,可以在求解方案对话框中选 择静力平衡选项。
静力平衡分析将模型移动到一个平衡 的状态。
基于UG的空间凸轮机构的运动仿真
收稿日期:2018-02-02作者简介:李银标(1967—),男,江苏无锡人,本科,毕业于江苏大学,高级实验师,研究方向:机械制造与自动化。
空间凸轮机构集空间机构结构紧凑及凸轮机构设计灵活,可实现从动件任意运动要求双重优点于一身广泛应用于各种自动化分度机械中,本文以UG软件为平台,以直动推杆圆柱凸轮机构为例,用UG表达式和规律曲线命令,得到圆柱凸轮的轮廓曲线,从而得到准确的凸轮轮廓造型,然后进行三维动力学仿真,并分析推杆位移、速度、加速度,为机构优化设计提供参考。
1 空间凸轮机构的工作原理直动推杆圆柱凸轮机构如图1所示,原动件凸轮匀速转动,带动推杆运动,输出运动为推杆来回移动,可以利用UG仿真来确定推杆任意时刻的位置、速度和加速度[1]。
空间凸轮曲线参数方程:X=50cosq Y=50sinq Z=50sinq+h 0 0°≤q≤360°将空间凸轮曲线参数方程,转化为符合UG规定的方程,手工输入表达式中,如图2所示。
由规律曲线生成凸轮轮廓曲线。
并按照空间凸轮尺寸构建三维造型,以及滚子、推杆、机架的三维造型。
空间凸轮机构三维造型如图3所示。
2 空间凸轮机构运动仿真分析方案(1)连杆(Links)的创建将空间凸轮机构活动构件建立连杆。
机架设为固定连杆1,空间凸轮设为连杆2,滚子设为连杆3,推杆设为连杆4。
(2)添加运动副空间凸轮机构的运动副一共涉及了2种,分别是旋转副和滑动副。
设定机架为固定副,选择插入→运动副→固定副,选择连杆为机架。
给空间凸轮与机架加上一个旋转副,选择插入→运动副→旋转副,第一个连杆选择凸轮轴圆周,这样就完成了“选择连杆(凸轮)”、“指定原点(圆心)”、“指定方位(圆所在平面的法线)三个步骤,第二个连杆选择机架。
完成一个旋转副的添加。
同样,将滚子与推杆用旋转副相连,将推杆与机架滑动副连接。
选择插入→运动副→滑块,第一个连杆选择推杆一端圆周,这样就完成了“选择连杆(推杆)”、“指定原点(圆心)”、“指定方位(圆所在平面的法线)三个步骤,第二个连杆选择机架。
基于UG的凸轮机构运动仿真研究
·44· 计算机应用技术 机械 2007年第12期 总第34卷————————————————收稿日期:2007-07-06 基于UG 的凸轮机构运动仿真研究刘善林,胡鹏浩,张勇(合肥工业大学 仪器科学与光电工程学院,安徽 合肥 230009)摘要:对凸轮机构的运动分析,除用传统的分析方法之外,还可利用UG 对其运动进行仿真分析。
通过举一凸轮机构的简单例子,详细说明了UG 运动仿真的方法和步骤,运动仿真的形式包括关节运动或运动仿真,运动仿真的结果可以用图表和电子表格的形式绘出,从而为机构的优化设计提供参考依据。
关键词:凸轮机构;运动仿真;UG中图分类号:TP391.9 文献标识码:A 文章编号:1006-0316(2007)12-0044-03The motion simulation and research of cam mechanism based on UGLIU Shan-lin ,HU Peng-hao ,ZHANG Yong(School of Instrument Science and Opto-electronic Engineering ,Hefei University of Technology ,Hefei 230009,China) Abstract :Another motion analysis method about cam mechanism has been introduced in this paper except the traditional one, taking a cam mechanism for example, the method and procedure how to realize the motion simulation based on UG has been presented in detail. The motion form can be displayed with Articulation or Animation, the result of motion simulation can be reflected with the graphic and the spreadsheet in order to provide the reference for the mechanism optimized design. Key words :cam mechanism ;motion simulation ;UG凸轮机构由凸轮、从动件和机架组成。
基于UGNX4_0的凸轮机构运动学仿真
图 4 加速度
UG NX4. 0 - Ba sed K inema tics S im ula tion of Cam M echan ism ZHEN G L i - b in1 CHEN G Q ua n - yua n2 FEN G S hao - yo ng1 DON G Zho ng - hao1
本文的凸轮机构为对心直动 滚子推杆盘形凸轮机构 ,推杆的 运动 规 律 为 二 次 多 项 式 。文 献 [ 1 ]利用参数化功能建立凸轮二 维曲线 ,本文进一步建立滚子推 杆曲线 。 (见图 1)由于只对机构 进行运动学分析 ,建立的二维凸
图 1 对心直动滚子推杆盘形凸轮机构
轮机 构 可 以 完 全 满 足 分 析 的 要 求。
2008年第 2期 唐喻胜 :农网 10kV架空线常见事故及其防范措施
·9·
(3)选用安普线夹 。在今后的 10kV 线路改造和检修中 , 逐步淘汰并沟线夹作导线连接器 ,并严禁不用线夹而缠绕接 线 ,应选用连接性能较好的安普线夹 ;
(4)检查 、整改接地装置 。定期检查测量 10kV 线路上接 地装置的接地电阻 ,不合格的给予整改 ,保证接地电阻值不大 于 10欧 。新安装的 10kV线路接地装置接地电阻也不宜大于 10欧 ,与 1kV 以下设备共用的接地装置接地电阻不大于 4欧 。 2. 2 防止台风所造成的事故
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Value Engineering
• 143 •
基于
UG 的凸轮机构运动分析仿真Movement Analysis and Simulation of Cam Mechanism Based on UG
夏雨露XIA Y u-lu (昆明船舶设备集团有限公司,昆明650236)
(K u n m in g S h ip b u ild in g E q u ip m e n t Co ., L td ., K u n m in g 650236, C hina )
摘要:本文介绍了以U G 软件为设计平台建立一个凸轮机构模型,同时对其进行运动仿真分析,阐述了运动仿真的实现过程,展
示凸轮机构真实的运动状态,其运动的结果用图表直观的反映出来,从这些图表中可以分析出凸轮设计的合理性,为凸轮机构的改 进设计提供一些参考。
A b s tr a c t : T h is pa per introduce s a m odel of cam m e chanism based on U G software , analyzes its m ovem ent s im u la tio n , describes the re a liza tio n process of m o tion sim u la tio n and shows the real m o tio n of cam m echanism . The results of the m o tion are d ire c tly re fle cte d in the ch a rt . From these ch a rts , we can analyze the ra tio n a lity of cam design to provides some references fo r the im provem ent of cam m e chanism .
关键词:U G ;凸轮机构;运动仿真K e y w o rd s :U G ; cam m e chanism ; m ovem ent sim u la tio n 中图分类号:T P 391.7 文献标识码:A 文章编号:1006-4311(2017)09-0143-02
位移(m m )
图1作图法绘制凸轮轮廓示意图
0引言U G ( U n ig r a p h ic s N X )是西门 子公司的一款三维设计软件,其 运动仿真的功能也相当强大,运
动仿真模块是U G 重要组成部 分,它可以直接应用模型的装配 文件来建立不同条件下的运动仿 真而不会干扰主模型的装配。
凸轮机构由凸轮、从动件和 底座组成。
其特点是结构简单、工 作可靠。
传统的凸轮机构的运动 分析方法有图解法、解析法,虽然 直观但作图复杂,而且建立的数 学关系式比较复杂;本文通过U G 模块建立凸轮机构的装 配模型,对凸轮机构进行运动仿真分析,可以直观的看到 凸轮的运动过程,同时从分析的结果中可以看到其机构存 在的不足,以便设计人员及时进行改进设计。
1凸轮轮廓线的绘制
下面以偏心直动尖点的凸轮机构作为例子,分别介绍 用作图法、解析法和利用U G 软件进行凸轮机构设计和运 动仿真分析的方法,先定义凸轮各参数:凸轮基圆半径r 0= 50m m ;偏心距e =10m m ;从动件行程s =26m m 。
1.1作图法绘制偏心直动尖点凸轮轮廓线
以O 点为圆心,以r 。
作为半径,作凸轮的基圆,同样 以O 为圆心,以e 为半径,作一个圆,根据位移图分别在基 圆上找到点1、2、3、…15,其中1到8为120。
,8到9为 60毅,9到15为90毅,分别过这些点作偏距圆的切 线,然后根据位移图,分别找到点1'、2'、3'、……15',用光
滑的曲线将这些点连接起来,就形成了凸轮的轮廓曲线,
其中1'到8'为推程,8'到9'为远休程,9'到15'为回程,
15'到0为近休程。
如图1所示。
作者简介:夏雨露(1977-)男,云南宜良人,工程师,副主任设计 师,研究方向为烟草机械设计。
1.2解析法设计凸轮轮廓线
根据工作的需要,选定从动件的运动规律,确定凸轮 的基圆半径,偏距,滚子半径等,如图2所示,然后用解析 法来设计凸轮轮廓曲线,在进行凸轮轮廓线设计时,求出 凸轮轮廓线的方程式:x =f (啄),y =f (啄),啄为凸轮转角,滚子 中心在初始位置B 处,坐标为:(e ,s 。
)。
由图可知:s (,2=r 02-e 2 则可得sl F (r (,2-e 2)2,当滚子中心到达B 。
点时,凸轮转过 啄,推杆产生位移s ,理论上轮廓线上B (,点的坐标为:X = (s0+s )s in 5+e cosS ;
Y =( s0+s )c o s 8-s in 8,此式即为凸轮轮廓线方程,其中s 0
为从动杆尖点初始位置到凸轮中心O 的位移。
由图可知: tg 0=-d x /d y =( d x /d S )/( -d y /d S )=s in 0/c o s 0,经过推导可以得 到凸轮轮廓B 0、的坐标为:x 、=x ±i \. c o s 0,y 、=y ±r . s in 0。
2用U G 进行凸轮机构运动仿真和运动分析
2.1创建连杆及运动副
进入U G 建模环境,绘制凸轮轮廓曲线,建立凸轮模
型,然后建立从动件和机架模型并且进行装配,进入运
动仿真环境,新建一个运动分析方案。
在U G 运动仿真
中,先将凸轮、从动杆及框架定义成为连杆,
才能在装配
• 144 •价值工程
图5时间曲线
图2解析法绘制凸轮轮廓示
模型中添加运动副。
连杆定义完成后,为各个组件定义 运动副,连杆和运动副必须是同时存在的,否则无法进 行运动仿真。
在本凸轮机构运动仿真中,建立三个连杆,分别为L001 (机架),L002(顶尖从动杆),L003(凸轮);建 立四个运动副,分别为机架固定副(J001 ),凸轮与机架之 间的旋转副(J002),顶尖从动杆与机架之间的滑动副 (J003 ),顶尖在凸轮轮廓线上的点在线上副(J004 ),如图 3所示。
2.2定义运动驱动
在U G运动仿真中,为了使机构运动起来,除了定义 连杆及运动副,需要添加“驱动”来使机构进行运动。
驱动 通常添加在组件的运动副上,用驱动可以让机构以某种规 律进行运转。
驱动主要有以下几种类型:①无驱动;②恒定 驱动;③简谐运动驱动;④运动函数;⑤关节运动驱动。
在 此凸轮机构运动中,将旋转副J002设为驱动,驱动形式选 择恒定驱动,并设定初速度参数为60,使凸轮以60°/s的速度匀速转动。
2.3创建解算方案
创建解算方案时就是要定义方案类型、步数、时间等 参数。
在一个机构中,可以定义多种解算方案,不同的解算 方案可以定义不同的分析条件。
定义此凸轮机构的解算方 案为:常规驱动,分析类型为:运动学/动力学,时间设为18 秒,步数为300步,选择“通过按确定进行解算”复选框。
确
定后启动解算器,进行运动分析,
运动分析完成后如果存在冗余的
约束,系统会自动弹出对话框进
行提示。
2.4运动仿真
解算方案计算完成后,点击
运动分析工具条上的“动画按
钮”,当点击播放按钮时,凸轮机
构就根据所设定的参数及运动
规律进行运动,如图4所示,播
放可以是一次播放,循环播放和
往返播放三种模式。
同时,点击
“导出至电影”按钮,则可以将此
仿真动画输出为A V I电影格式。
除了可以使用“动画”工具输出
机构运动视频外,其分析结果还
可以图表的方式输出。
点击“作
图”按钮,在弹出的图表对话框中选择顶尖滑动副J003
为图表对象,单击添加按钮将位移曲线加到定义曲线列
表中,点击确定按钮,即可输出时间-位移曲线,用同样
的方法,可以输出时间-速度曲线、时间-加速度曲线、时
间-力曲线,如图5所示。
图4创建动画
3结论
利用U G作为三维设计软件,在建模环境中建立凸轮
机构的模型,在仿真模块中进行凸轮机构的运动仿真分
析,通过模拟凸轮机构实际运动状况及输出的时间-位移
曲线、时间-速度曲线、时间-加速度曲线、时间-力曲线
等,可以分析出所设计的凸轮机构的干涉情况及是否满足
当前工作要求。
相比传统的作图法及解析法来设计凸轮机
构,使用三维软件进行凸轮机构的设计,不仅可以直观地
观察到机构实际的运动状态,还可以通过分析的结果来指
导设计人员进行机构的优化设计,同时避免了用传统的方
法而进行的大量而又复杂的设计计算,大大减轻了设计人
员的工作强度。
参考文献:
[1]宋晓华,方坤礼.基于U G的凸轮机构设计和运动仿真机 械研究与应用,2005(18).
[2]王知行,刘廷荣.机械原理[M].北京:高等教育出版社,2000.
[3]北京兆迪科技有限公司.U G N X8.5运动分析教程[M].机械工业出版社,
2014.。